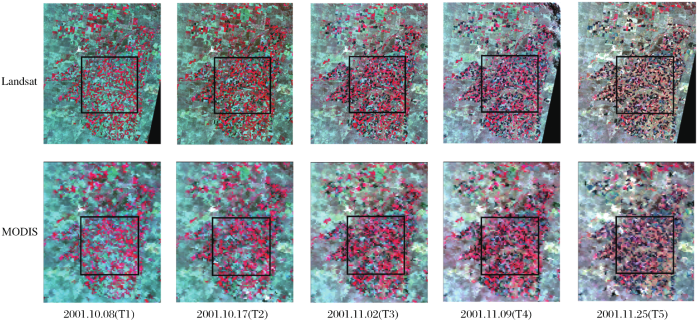
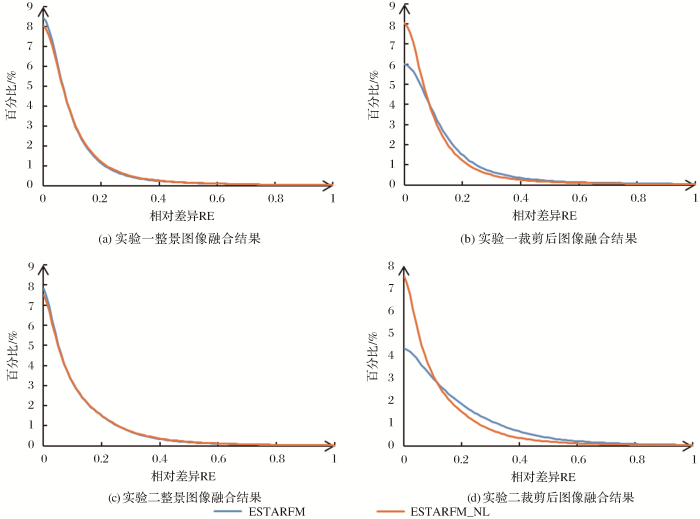
ESTARFM(Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)是一种经典的基于权重滤波的时空融合算法,它在众多领域得到广泛应用。相似像元选取是其一个重要步骤,ESTARFM模型中相似像元选取过程受搜索框大小和分类数影响,当前的研究中搜索框大小的设定较为统一,而分类数大小设定缺乏统一性。为降低ESTARFM算法中分类数对算法性能的影响,将STNLFFM(A Spatial and Temporal Nonlocal Filter-Based Data Fusion Method)中相似像元选取方法与ESTARFM模型相结合,提出改进的ESTARFM_NL模型。研究设计了两组不同时相变化条件下的数据进行对比分析。结果表明:ESTARFM_NL与ESTARFM融合结果相对误差直方图总体分布趋近一致,同时利用平均相对误差和相关系数对融合结果进行评价,发现两种算法之间精度差异较小,表明两种算法融合精度相当;对比两种算法运算效率,发现ESTARFM_NL运行时间能够得到大幅缩减。因此,ESTARFM_NL为大区域或长时间序列遥感数据的时空融合提供了一种可选择的融合方案。
关键词:时空融合
;
ESTARFM
;
相似像元选取
;
阈值法
;
运行效率
Abstract
The ESTARFM (Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model) is a classic spatiotemporal filter-based algorithm, which is used in the many fields. The similar pixel selection process in the ESTARFM model is affected by the size of the size of search window and the number of classifications. In the current study, the size of the search windows is more uniform, and the number of classifications lacks uniformity. In order to reduce the influence of the number of classifications in the ESTARFM algorithm on the performance of the algorithm. The similar pixel selection method in the STNLFFM (A Spatial and Temporal Nonlocal Filter-Based Data Fusion Method) combined with the ESTARFM model to propose the ESTARFM_NL model. The study designed two sets of data under different conditions of phase change for comparative analysis. The results show that the overall distribution of the relative error histogram of ESTARFM_NL and ESTARFM is tight and consistent. When the fusion results are evaluated by the average relative error and correlation coefficient, the difference between the two algorithms is considerable, indicating that the fusion accuracy of the two algorithms is equivalent. Comparing the efficiency of the two algorithms, we found that the ESTARFM_NL running time can be greatly reduced. Therefore, ESTARFM_NL provides an alternative fusion scheme for large-area or long-term sequence remote sensing data with large data volume.
Keywords:Spatiotemporal fusion
;
ESTARFM
;
Similar pixel selection
;
Threshold value method
;
Running efficiency
Dong Shiyuan, Zhang Wenjuan, Xu Junyi, Ma Jianhang. Study of the Improved Similar Pixel Selection Method on ESTARFM. Remote Sensing Technology and Application[J], 2020, 35(1): 185-193 doi:10.11873/j.issn.1004-0323.2020.1.0185
1 引 言
为弥补遥感图像受硬件制约导致的“时空矛盾”问题,近年来国内外研究学者针对能够获取到的高空间低时间分辨率图像和低空间高时间分辨率图像,逐步发展了几种核心理论不同的时空融合算法,以生成高空间高时间分辨率图像。模型主要分为3类:基于权重滤波的时空融合模型、基于稀疏表达的时空融合模型以及基于混合像元分解的时空融合模型[1,2]。其中基于权重滤波的时空融合模型原理简单,目前发展最为成熟,典型算法包括STARFM(Spatial and Temporal Adaptive Reflectance Fusion Model)[3]、ESTARFM(Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)[4,5]、STAARCH(Spatial Temporal Adaptive Algorithm for mapping Reflectance Change)[6]、STNLFFM(A Spatial and Temporal Nonlocal Filter-Based Data Fusion Method)[7]等。它们在植被物候分析[8]、水污染监测[9]、地表蒸散发研究[10,11,12]等方面得到广泛应用。
Mapping Daily Evapotranspiration based on Spatiotemporal Fusion of Aster and MODIS Images over Irrigated Agricultural Areas in the Heihe River Basin, Northwest China
[J].Agricultural and Forest Meteorology,2017,244-245(15):82-97.
Estimation of Daily Evapotranspiration and Irrigation Water Efficiency at A Landsat-like Scale for an Arid Irrigation Area Using Multi-source Remote Sensing Data
[J].Remote Sensing of Environment,2018,216:715-734.
Generating A Series of Fine Spatial and Temporal Resolution Land Cover Maps by Fusing Coarse Spatial Resolution Remotely Sensed Images and Fine Spatial Resolution Land Cover Maps
[J].Remote Sensing of Environment,2017,196:293-311.
Assessing the Accuracy of Blending Landsat-MODIS Surface Reflectances in Two Landscapes with Contrasting Spatial and Temporal Dynamics: A Framework for Algorithm Selection
[J].Remote Sensing of Environment,2013,133:193-209.
Evaluation of Landsat and MODIS Data Fusion Products for Analysis of Dryland Forest Phenology
1
2012
... 为弥补遥感图像受硬件制约导致的“时空矛盾”问题,近年来国内外研究学者针对能够获取到的高空间低时间分辨率图像和低空间高时间分辨率图像,逐步发展了几种核心理论不同的时空融合算法,以生成高空间高时间分辨率图像.模型主要分为3类:基于权重滤波的时空融合模型、基于稀疏表达的时空融合模型以及基于混合像元分解的时空融合模型[1,2].其中基于权重滤波的时空融合模型原理简单,目前发展最为成熟,典型算法包括STARFM(Spatial and Temporal Adaptive Reflectance Fusion Model)[3]、ESTARFM(Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)[4,5]、STAARCH(Spatial Temporal Adaptive Algorithm for mapping Reflectance Change)[6]、STNLFFM(A Spatial and Temporal Nonlocal Filter-Based Data Fusion Method)[7]等.它们在植被物候分析[8]、水污染监测[9]、地表蒸散发研究[10,11,12]等方面得到广泛应用. ...
Mapping of Heavy Metal Pollution in River Water at Daily Time-scale Using Spatio-temporal Fusion of MODIS Aqua and Landsat Satellite Imageries
1
2017
... 为弥补遥感图像受硬件制约导致的“时空矛盾”问题,近年来国内外研究学者针对能够获取到的高空间低时间分辨率图像和低空间高时间分辨率图像,逐步发展了几种核心理论不同的时空融合算法,以生成高空间高时间分辨率图像.模型主要分为3类:基于权重滤波的时空融合模型、基于稀疏表达的时空融合模型以及基于混合像元分解的时空融合模型[1,2].其中基于权重滤波的时空融合模型原理简单,目前发展最为成熟,典型算法包括STARFM(Spatial and Temporal Adaptive Reflectance Fusion Model)[3]、ESTARFM(Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)[4,5]、STAARCH(Spatial Temporal Adaptive Algorithm for mapping Reflectance Change)[6]、STNLFFM(A Spatial and Temporal Nonlocal Filter-Based Data Fusion Method)[7]等.它们在植被物候分析[8]、水污染监测[9]、地表蒸散发研究[10,11,12]等方面得到广泛应用. ...
A Data Fusion Approach for Mapping Daily Evapotranspiration at Field Scale
1
2013
... 为弥补遥感图像受硬件制约导致的“时空矛盾”问题,近年来国内外研究学者针对能够获取到的高空间低时间分辨率图像和低空间高时间分辨率图像,逐步发展了几种核心理论不同的时空融合算法,以生成高空间高时间分辨率图像.模型主要分为3类:基于权重滤波的时空融合模型、基于稀疏表达的时空融合模型以及基于混合像元分解的时空融合模型[1,2].其中基于权重滤波的时空融合模型原理简单,目前发展最为成熟,典型算法包括STARFM(Spatial and Temporal Adaptive Reflectance Fusion Model)[3]、ESTARFM(Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)[4,5]、STAARCH(Spatial Temporal Adaptive Algorithm for mapping Reflectance Change)[6]、STNLFFM(A Spatial and Temporal Nonlocal Filter-Based Data Fusion Method)[7]等.它们在植被物候分析[8]、水污染监测[9]、地表蒸散发研究[10,11,12]等方面得到广泛应用. ...
Mapping Daily Evapotranspiration based on Spatiotemporal Fusion of Aster and MODIS Images over Irrigated Agricultural Areas in the Heihe River Basin, Northwest China
1
2017
... 为弥补遥感图像受硬件制约导致的“时空矛盾”问题,近年来国内外研究学者针对能够获取到的高空间低时间分辨率图像和低空间高时间分辨率图像,逐步发展了几种核心理论不同的时空融合算法,以生成高空间高时间分辨率图像.模型主要分为3类:基于权重滤波的时空融合模型、基于稀疏表达的时空融合模型以及基于混合像元分解的时空融合模型[1,2].其中基于权重滤波的时空融合模型原理简单,目前发展最为成熟,典型算法包括STARFM(Spatial and Temporal Adaptive Reflectance Fusion Model)[3]、ESTARFM(Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)[4,5]、STAARCH(Spatial Temporal Adaptive Algorithm for mapping Reflectance Change)[6]、STNLFFM(A Spatial and Temporal Nonlocal Filter-Based Data Fusion Method)[7]等.它们在植被物候分析[8]、水污染监测[9]、地表蒸散发研究[10,11,12]等方面得到广泛应用. ...
Responses of Field Evapotranspiration to the Changes of Cropping Pattern and Groundwater Depth in Large Irrigation District of Yellow River Basin
1
2017
... 为弥补遥感图像受硬件制约导致的“时空矛盾”问题,近年来国内外研究学者针对能够获取到的高空间低时间分辨率图像和低空间高时间分辨率图像,逐步发展了几种核心理论不同的时空融合算法,以生成高空间高时间分辨率图像.模型主要分为3类:基于权重滤波的时空融合模型、基于稀疏表达的时空融合模型以及基于混合像元分解的时空融合模型[1,2].其中基于权重滤波的时空融合模型原理简单,目前发展最为成熟,典型算法包括STARFM(Spatial and Temporal Adaptive Reflectance Fusion Model)[3]、ESTARFM(Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)[4,5]、STAARCH(Spatial Temporal Adaptive Algorithm for mapping Reflectance Change)[6]、STNLFFM(A Spatial and Temporal Nonlocal Filter-Based Data Fusion Method)[7]等.它们在植被物候分析[8]、水污染监测[9]、地表蒸散发研究[10,11,12]等方面得到广泛应用. ...
Estimation of Daily Evapotranspiration and Irrigation Water Efficiency at A Landsat-like Scale for an Arid Irrigation Area Using Multi-source Remote Sensing Data
Generating A Series of Fine Spatial and Temporal Resolution Land Cover Maps by Fusing Coarse Spatial Resolution Remotely Sensed Images and Fine Spatial Resolution Land Cover Maps
Assessing the Accuracy of Blending Landsat-MODIS Surface Reflectances in Two Landscapes with Contrasting Spatial and Temporal Dynamics: A Framework for Algorithm Selection







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}