1 引 言
获取农作物生长过程中的各种农情参数,如作物长势、旱情、产量、物候等,对农业生产的宏观决策和生产安全具有重要意义。而农业生产活动以其空间分布的分散性、时空分布的差异性、灾害的突发性,使得农情监测工作长期以来较为被动[1 ] 。使用遥感技术进行农情监测,能够快速、大范围地对农作物进行监测,相比常规的地面监测手段具有很大优势。但是,以传统的航空、航天平台为载体的遥感技术,受制于辐射分辨率、空间分辨率、时间分辨率和大气状况等因素的影响,难以对特定地区及时展开高频次和不同分辨率的近地表多波谱影像数据的采集工作[2 ] 。无人机作为新兴的遥感平台,具有灵活性好、作业效率高、操作简便及可搭载多种传感器等特点,能以较低的成本提供精确、实时的局地农作物信息,正逐步成为传统卫星和地面遥感平台的有效补充手段[3 ] 。
无论是固定翼还是旋翼无人机搭载传感器飞行观测时均有一定的观测几何。这种入照和观测方向上的观测几何可以由多个角度的镜头成像、航线(航向和旁向)重叠或在一幅影像的不同像元间形成。相对于单一方向遥感而言,多角度遥感通过对地面目标多个方向的观测,能够提取出更加丰富的目标参数。但是,在基于无人机遥感应用中,观测角度诱发的潜在误差仍需深入理解。目前,主流的测绘相机仍然是通过获取可见光波谱范围内的红绿蓝(RGB)三波段信息,再结合摄影测量过程中采集的POS数据,提取出地形特征点的位置信息。除了位置信息,近年来无人机遥感越来越多的被用于波谱数据采集和信息提取。汪小钦等[4 ] 借鉴归一化植被指数原理提出可见光波段差异植被指数(VDVI,Visible-band Difference Vegetation Index)并用于提取植被信息,取得较好效果。卞雪等[5 ] 利用可见光波段提取出的红绿比值指数(RGRI,Red Green Ratio Index)、过绿指数(EXG,Excess Green)、归一化绿红差值指数(NGRDI,Normalized Green-Red Difference Index)、归一化绿蓝差值指数(NGBDI,Normalized Green-Blue Difference Index)等计算植被覆盖度,并与可见光波段差异植被指数(VDVI)计算出的结果相比较,指出基于VDVI植被指数的计算精度最高。赵静等[6 ] 利用过绿指数(EXG)、归一化绿蓝差值指数(NGBDI)和可见光波段差异植被指数结合监督分类提取了玉米4个时期的植被覆盖度信息,指出过绿指数(EXG)的提取效果最好。刘帅兵等[7 ] 将提取出的可见光波段差异植被指数与各试验区冬小麦的氮含量进行相关性分析,对基于RGB三波段信息的冬小麦氮含量反演进行了研究。
无人机遥感比常规固定轨道,甚至具有凝视功能的卫星遥感系统具有更为灵活的空间角度采样能力。因此,无人机遥感面向不同应用时,会涉及整个半球空间内更为丰富的方向反射。但是,地物波谱因观测几何造成的波动及其在后续应用中的传递,如植被指数等,仍有待进一步深入理解。本文利用无人机搭载航摄型光学相机对水稻实验样方进行观测,依据航带的航向和旁向重叠,提取水稻冠层的多角度、多波段信息,分析水稻冠层可见光波段的方向反射特点,考察其在典型植被指数中的传递情况。
2 实验区概况
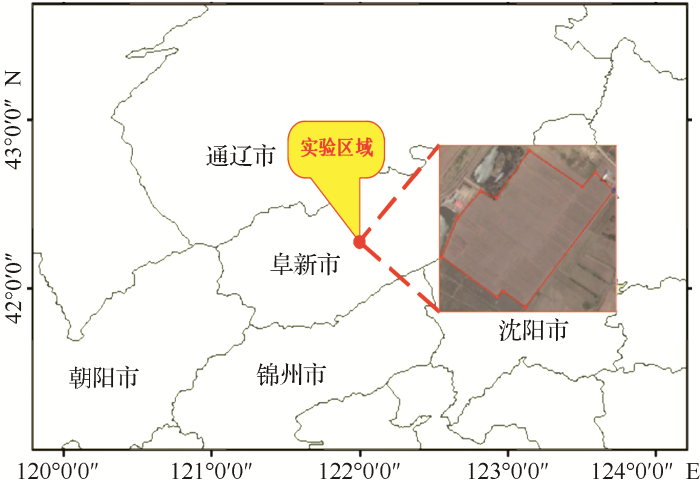
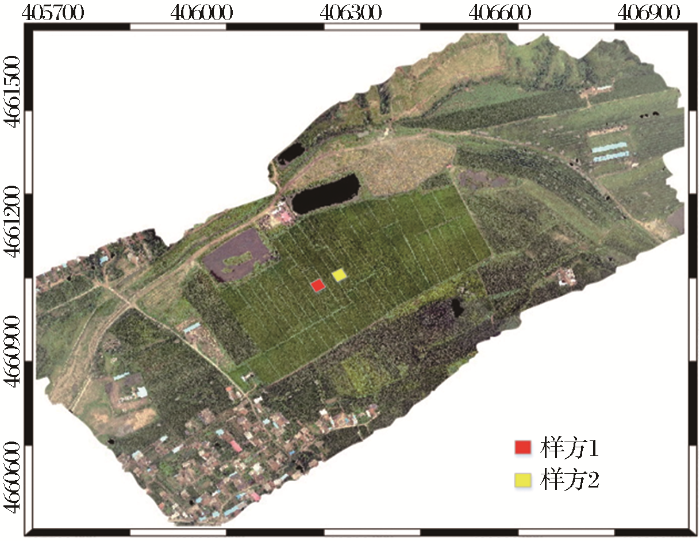
辽宁省属温带季风气候,雨热基本同季,四季分明,夏秋日照时间长,太阳辐射丰富,年积温较高,整体地势呈马蹄形,具有“六山一水三分田”的典型地貌,且土质肥沃,适宜水稻、玉米等多种农作物生长,是全国粮食生产的重要基地之一。辽宁省耕地面积约409.29万hm2 ,80%左右分布在辽中平原和辽西北的河谷地带。实验区域海拔约170 m,地势平坦,位于辽宁省西北阜新市境内(图1 )。该大田均匀种植了水稻作物,面积约0.943 km2 ,具有区域代表性。
图1
图1
实验区域的地理位置图
Fig.1
The location of the experimental area
3 实验数据和方法
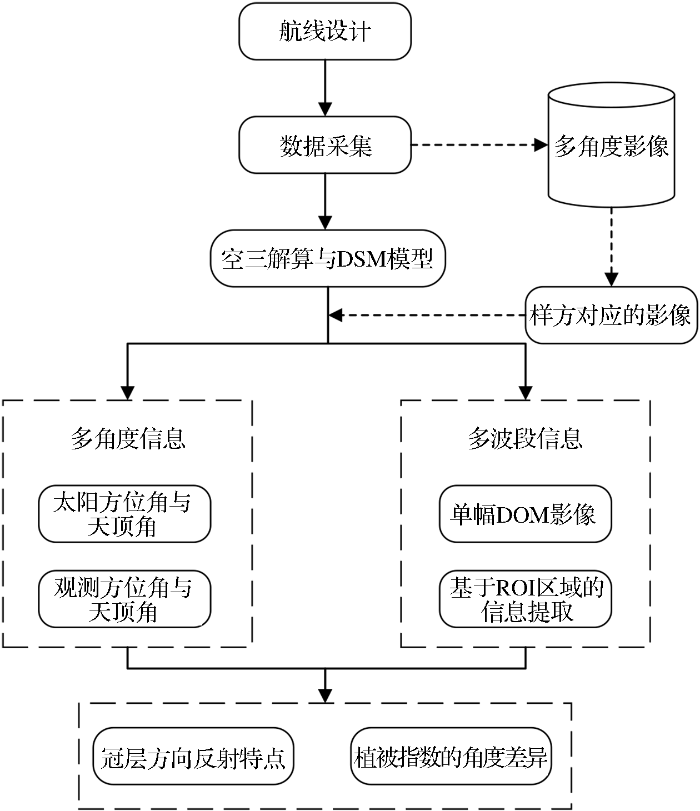
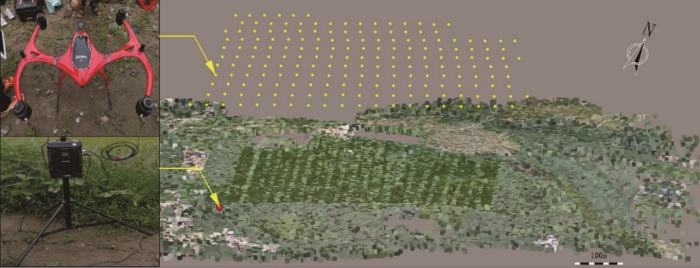
本次研究采用HARWAR-V8Ⅱ八旋翼无人机搭载量测型光学相机(HARWAR-YT-5POPC IV)开展多波段影像数据采集、地表三维重建和样方级多角度信息提取的实验与分析工作(主要流程见图2 )。根据实验区域的特点和获取多角度观测的目的,共设计了11条航线,航高200 m,航向和旁向重叠均为80%,地表空间分辨率可达0.05 m。并于2019年8月7日下午15点,以竖直摄影镜头为主,对处于扬花生育期的水稻大田实验区域进行数据采集,共采集192幅多波段影像及实时POS定位系统获取的传感器位置信息(图3 )。
图2
图2
实验流程图
Fig.2
Flow chart of experiment
图3
图3
无人机数据采集示意图
Fig.3
Schematic diagram of UAV data acquisition
在实验数据预处理过程中,选取两个5 m×5 m的典型水稻样方,使用多种方法进行一系列辅助数据提取。首先空三解算平差处理、建立数字表面模型(DSM)和数字正射影像(DOM),明确图幅层面的空间观测几何,为精准定位覆盖同一测点的重叠影像服务。
再对航摄影像进行几何配准纠正、辐射重采样,然后结合水稻样方的中心位置和包含样方的多角度航摄影像POS数据,计算样方的观测几何,并结合地面参考板提取出水稻样方的多波段反射及其入照-观测的角度信息,为后续的方向反射分析提供了基础数据。
3.1 区域空三解算
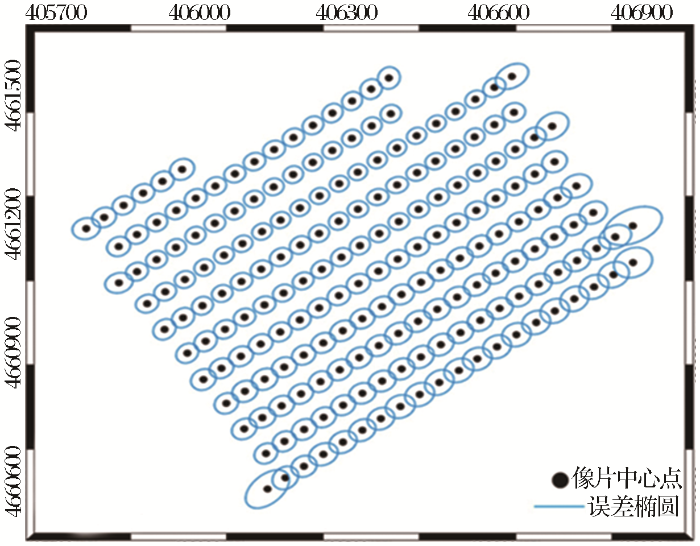
区域空中三角测量是航空摄影测量数据处理的关键性技术之一,区域空三解算的成功与否直接关系到后续的DSM模型、区域DOM影像的制作。实验过程中,使用CONTEXT CAPTURE软件在POS数据的支持下,进行自动空三解算。结果表明,平差后的传感器中心点X方向平均误差为±0.17 dm,Y方向平均误差为±0.15 dm,Z方向平均误差为±0.04 dm,统计结果如表1 所示,误差椭圆的分布如图4 所示。经平差处理后的影像参数,对立体测图和影像纠正具有重要意义。
图4
图4
传感器中心误差椭圆分布
Fig.4
The distribution of error ellipse for sensor centers
3.2 区域DSM模型与DOM影像
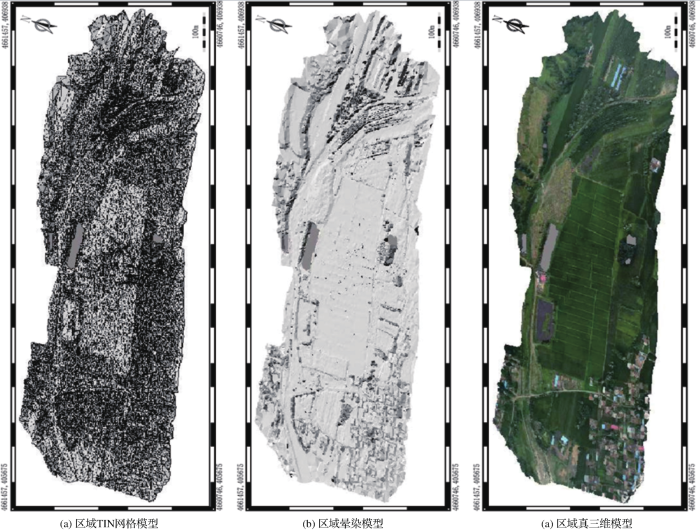
空三解算完成以后,可以提取出区域范围内地形特征点的位置信息,形成点云数据,内插形成TIN网格模型,经过晕染、粘贴像片纹理以后即可形成真三维模型(图5 )。航空摄影测量过程中,航摄影像为中心投影而且其主光轴不可能与地面保持理想垂直,所以需要将中心投影的航摄像片纠正为正射影像(DOM),然后拼接形成整个实验区域的DOM影像。在区域DSM模型的基础上,可以获取区域DOM影像(图6 ),然后以此为基准对包含实验样方的多张航摄像片单独进行几何纠正,为下一步提取水稻冠层多波段数据提供基础。
图5
图5
区域DSM模型图
Fig.5
Regional DSM model
图6
图6
区域DOM影像图
Fig.6
Regional DOM image
3.3 多角度与多波段信息的提取
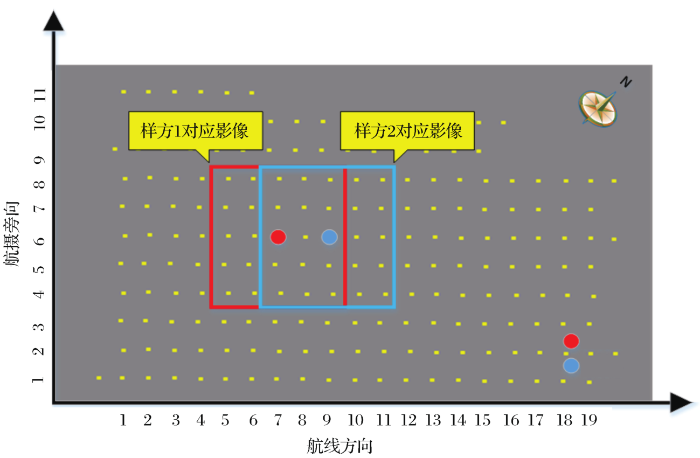
选取水稻样方时应遵循以下原则:①选取均一水稻播种区;②要保证样方尽可能地对应丰富的观测角度,避免观测区边缘,以免影响重叠影像的数量。在上述原则下,所选样方的位置信息与基本数据(CGCS2000坐标系统,中央子午线为123°),如表2 所示。根据水稻样方中心点的投影坐标与传感器中心点投影坐标的几何关系,可以方便地找出包含水稻样方的航向与旁向影像,如图7 所示。
图7
图7
水稻样方对应的影像分布
Fig.7
The distribution of corresponding images of rice quadrats
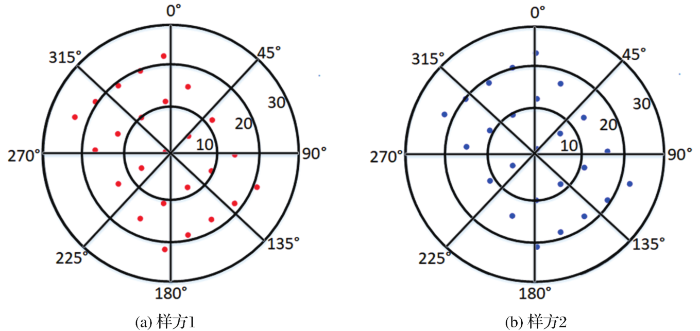
在此基础上,根据实验样方的中心位置(XL,YL,ZL)与传感器的中心位置(X,Y,Z),由公式(1)~(3)可以解算出传感器的观测天顶角θ φ [8 ] ,结果见图8 。
图8
图8
样方1和样方2角度采样示意图
(方位角以正北为0°,顺时针为正;天顶角以中心为天顶0°,10度间隔的圆环表示)
Fig.8
Diagram of sampling angles of quadrat 1 and quadrat 2
θ = t a n - 1 ( X - X L ) 2 + ( Y - Y L ) 2 ( Z - Z L ) 2 (1)
ϕ = c o s - 1 X - X L X - X L 2 + Y - Y L 2 , Y - Y L ≥ ϕ (2)
ϕ = 2 π - c o s - 1 X - X L X - X L 2 + Y - Y L 2 , Y - Y L < ϕ (3)
在获取区域DOM影像的基础上,将航摄影像纠正为单幅DOM影像,使用ENVI软件将样方标示为ROI区域(大小为100像元×100像元),对ROI区域内的像元DN值进行分析,提取出各波段DN值的均值信息。虽然纠正后的单幅DOM影像进行了重采样,但是对样方级别的影像DN均值而言,其影响非常微小[9 ] 。
通过在地面设置漫反射参考板和所布设亮暗目标,可以将像元各波段DN值进行辐射纠正转换为地表反射比。
3.4 太阳天顶角与方位角
对于实验区域内的水稻样方而言,太阳天顶角是指太阳光的入射方向和样方地表切面法线方向之间的夹角。太阳天顶角与太阳辐射强度紧密相联,中午12点左右的太阳天顶角是一天中的最小值,此时太阳辐射强度最大。太阳方位角是以目标物的地理正北为零,按顺时针旋转,与太阳光入射方向在地表的投影射线所形成的夹角。对北半球而言,早晨太阳方位角在90°左右,中午在180°左右,落日时太阳方位角为270°度左右。当然,在一年当中,这些数据都有一定的波动。太阳天顶角和方位角的计算[10 -11 ] 见公式(4)~(5)。
s i n ( π / 2 - A L T ) = s i n B ⋅ s i n δ + c o s B ⋅ c o s δ ⋅ c o s t (4)
c o s A Z I = ( s i n A L T ⋅ s i n B - s i n δ ) / ( c o s A L T ⋅ c o s B ) (5)
其中:ALT为太阳天顶角;AZI为太阳方位角;B 为地理纬度;δ 为太阳赤纬;t 为时角。将样方的地理坐标(纬度42.079°,经度121.867°)和外业的日期、时间(2019-08-07,15时54分)作为参数输入,计算出ALT(太阳天顶角,57.07°)和AZI(太阳方位角,262.83°)的数值。
4 结果与分析
4.1 水稻样方冠层方向反射特点及分析
在获取多角度多波段数据的基础上,对水稻样方对应的25个观测方位数据进行分析,统计出每个样方在红(R)、绿(G)、蓝(B)三波段的方向反射率信息,结果见表3 。
从表3 首先可以看出,绿光波段的平均反射率高于红光和蓝光波段,而蓝光波段的平均反射率弱于红光波段,符合水稻扬花期“绿色植株散落暗黄稻花”在可见光波段的反射特性。再则,方向观测对不同波段影响程度各有差异。绿光波段,角度影响造成的最大偏差和均方根误差均较小,而红光波段反射率的整体波动较强,无论是绝对波动范围还是相对偏差比例都是3个波段中最大的。
总体上,角度效应对绿光波段反射影响略弱,对红光波段影响较大。
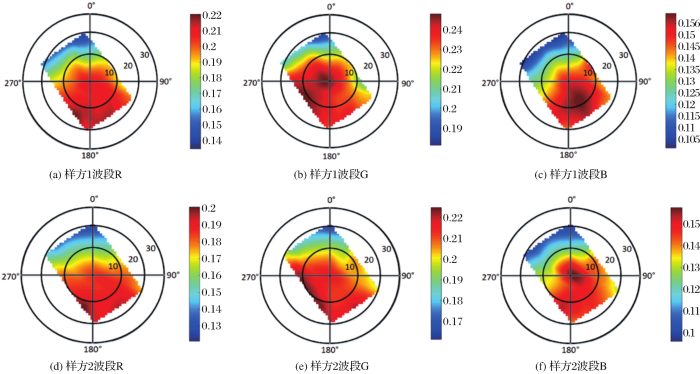
不同于单株农作物,样方内的水稻具体有行播作物特点。因此,结合太阳方位(方位角262.83°)和水稻垄向,从前向、后向(太阳在观测者背后称之为后向观测,反之为前向观测[12 ] )及顺垄(方位角150.00°)和垂直垄方向(方位角240.00°)考察样方的方向反射特点。根据两个样方(见图7 所示位置)获取的有效角度采样,用双三次插值方法拟合出水稻样方冠层的方向反射率。如图9 所示,为覆盖样方1(a)~(c)和样方2(d)~(f)的红(R)、绿(G)、蓝(B)光波段的多角度观测拟合图。
图9
图9
水稻样方1和样方2冠层RGB三波段方向反射率拟合图
Fig.9
The fitting picture of directional canopy reflectance over rice quadrat #1 and #2 at RGB bands
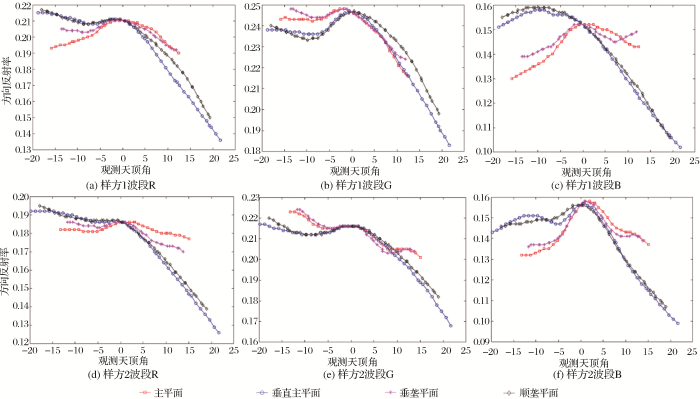
从图9 可看出:①两个样方均表明绿光波段在主平面后向反射方位,尤其是热点附近反射明显高于其他方向,而且随着观测角度的增加后向反射继续增强,这与扬花期水稻冠层在绿光波段具有较强的反射特性息息相关。而在反射率较低的蓝和红波段未捕获到明显热点;②对反射率较高的绿波段而言,反射率峰值出现在后向热点方位;而蓝红两个波段其反射率峰值出现在顺垄一侧方向,这或与水稻生长发育和田间管理息息相关。为保证有效养分输送和光合作用,扬花期稻田仍需持有浅层薄水,水体反射行播作物的特定方向易进入观测视场,加强该方向的反射;③除去热点效应和部分反射率峰值,观测天顶角对方向反射率仍有重要影响,随着观测天顶角的增大,反射率强度也随之减小。做出水稻样方在主平面、垂直主平面、垂垄平面、顺垄平面的方向反射率曲线(图10 ),并采用每条曲线的各向异性指数对观测平面进行定量分析[13 -14 ] ,其计算方法为公式(6),具体结果见表4 。
图10
图10
水稻冠层不同观测平面反射率曲线
Fig.10
Reflectance curves of rice canopy from various observation planes
A N I X ( λ , θ ) = R m a x ( λ ) / R m i n ( λ ) (6)
从图10 和表4 可以看出:在红(R)、绿(G)、蓝(B)3个波段中,两个样方的各向异性指数最大值都在垂直主平面上。这是由于航测相机拍摄影像的大小为4 000像元×6 000像元,而航向和旁向重叠度均设置为80%,故其航向和旁向相邻摄影中心的距离不相同。虽然两个样方在航向和旁向各获取5幅影像,拟合出的方向反射率图形是一个矩形区域,但垂直主平面方向角度采样范围更大。这表明,随着观测天顶角变化范围的增加,方向反射在红(R)、绿(G)、蓝(B)波段的差异都潜在增大。
4.2 可见光植被指数及其角度效应
尽管可见光波段无法体现近红外波段的反射陡峰,但是绿色植被在可见光的3个波段仍然表现出一定的波谱特性。因此,在可见光波段仍然可以提取出一些植被指数,如绿红比值指数GRRI[15 ] ,绿蓝比值指数GBRI[16 ] ,归一化绿红差异指数NGRDI[17 ] ,可见光波段差异植被指数VDVI[4 ] 等。根据实验过程中提取出的多角度、多波段信息,由每个实验样方对应的25个观测方位的红(R)、绿(G)、蓝(B)三波段方向反射率可以直接计算出这些可见光植被指数,其计算方法见公式(7)~(10),统计由不同观测方位计算得到的植被指数偏差(表5 )。
G R R I = ρ ( G r e e n ) / ρ ( R e d ) (7)
G B R I = ρ ( G r e e n ) / ρ ( B l u e ) (8)
N G R D I = ρ ( G r e e n ) - ρ R e d ρ ( G r e e n ) + ρ R e d (9)
V D V I = 2 × ρ ( G r e e n ) - ( ρ B l u e + ρ R e d ) 2 × ρ ( G r e e n ) + ( ρ B l u e + ρ R e d ) (10)
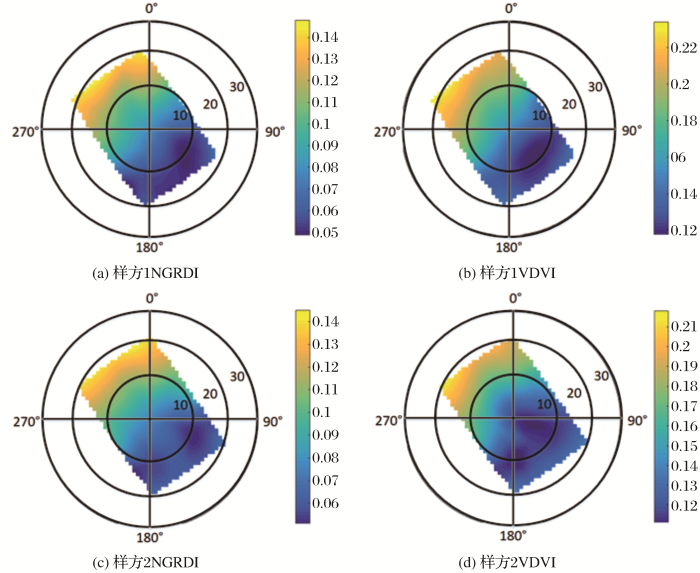
从表5 可以看出,方向反射率差异传递到植被指数层面以后:①对GRRI指数、GBRI指数造成的影响较小,从最大偏差值来看,GRRI和GBRI指数最大偏差分别不超过12%和20%,而NGRDI和VDVI两个指数的最大相对偏差分别可高达60%和40%以上。考虑到红(R)、绿(G)、蓝(B)三波段的反射率偏差量级,说明比值指数GRRI和GBRI对方向反射率传递的误差具有一定的抵抗能力;②对NGRDI指数、VDVI指数造成的影响较大,这是因为这两个指数均做了一个非线性拉伸,虽然增加了波段之间的对比度,但同时也造成对观测方位的高度敏感性。为进一步分析这种敏感性,做出NGRDI指数、VDVI指数随观测方位变化的拟合图形,两种指数的分布情况见图11 。从图11 可以看出:NGRDI指数、VDVI指数随着观测角度和方位的变化其取值差异很显著。所以在实际使用过程中,进行角度归一化不可忽略。
图11
图11
NGRDI和VDVI植被指数拟合图
Fig.11
The fitting map of NGRDI and VDVI vegetation index
5 结论与讨论
本文在普通航摄相机拍摄的影像基础上,提取出多角度多波段信息,然后结合太阳的方位角、天顶角对水稻样方冠层的反射率偏差进行分析,最后计算出实验区扬花期水稻样方的可见光植被指数,并探讨了其角度效应与分布特征。得出如下结论:①在有限的近天顶角度采样范围内,绿光波段反射较高,且易于捕获到方向反射的热点;②不同波段的反射率不同,产生的反射率峰值的方位也不同,而红、绿、蓝三个波段的方向反射率最大差异分别可达30.17%、22.03%、27.31%;③观测天顶角对水稻冠层反射率有重要影响;④GRRI指数、GBRI指数受方向反射率偏差的影响较小,体现出了一定的抗误差能力;而NGRDI指数、VDVI指数受方向反射率偏差的影响较大,对观测方位引起的角度效应高度敏感;⑤方向反射率偏差传递到植被指数层面以后,会对其数值偏差和分布形状产生一定影响,所以在实际使用过程中,角度归一化不可忽略。
无人机遥感应用于农情监测领域,具有一些独特的优势,如低成本、灵活性高、受大气状况影响小等,能够快速、精准的获得局地农作物信息[18 -19 ] 。但是,由无人机观测几何诱发的方向反射存在一定程度的差异,而且会传递到后续的植被指数中。这种波谱反射差异对农情和农作物的定量研究具有无法忽视的潜在影响[20 ] ,程雪等[21 ] 的研究结果表明,一定范围内的光谱反射率变化,即可对反演出的叶面积指数(Leaf Area Index,LAI)产生较大影响。本文以扬花期水稻大田样方为目标,提取了不同观测几何下的水稻样方冠层的多波段反射率,定量分析了多角度条件下的方向反射差异及其对后续植被指数提取的影响,警示我们在研究过程中,必须对由观测几何造成的方向反射差异进行角度效应纠正。限于航摄相机仅能在可见光波段获取红(R)、绿(G)、蓝(B)三波段的反射信息,而且水稻样方正处于扬花期,需要进一步研究水稻冠层和其他农作物在不同生育期或地表覆被类型的多角度反射特点及其有效纠正方法。
参考文献
View Option
[1]
Shi Zhou Liang Zongzheng Yang Yuanyuan et al Status and Prospect of Agricultural Remote Sensing
[J]. Transactions of the Chinese Society for Agricultural Machinery ,2015 ,46 (2 ):247 -260 .
[本文引用: 1]
史舟 ,梁宗正 ,杨媛媛 , 等 农业遥感研究现状与展望
[J].农业机械学报 ,2015 ,46 (2 ):247 -260 .
[本文引用: 1]
[2]
Liu Zhong Wan Wei Huang Jinyu et al Progress on Key Parameters Inversion of Crop Growth based on Unmanned Aerial Vehicle Remote Sensing
[J]. Transactions of the Chinese Society of Agricultural Engineering , 2018 , 34 (24 ): 60 -71 .
[本文引用: 1]
刘忠 ,万炜 ,黄晋宇 , 等 基于无人机遥感的农作物长势关键参数反演研究进展
[J].农业工程学报 ,2018 ,34 (24 ):60 -71 .
[本文引用: 1]
[3]
Li Deren Li Ming Research Advanceand Application Prospect of Unmanned Aerial Vehicle Remote Sensing System
[J]. Geomatics and Information Science of Wuhan University ,2014 ,39 (5 ):505 -513 .
[本文引用: 1]
李德仁 ,李明 无人机遥感系统的研究进展与应用前景
[J].武汉大学学报(信息科学版) ,2014 ,39 (5 ):505 -513 .
[本文引用: 1]
[4]
Wang Xiaoqin Wang Miaomiao Wang Shaoqiang et al Extraction of Vegetation Information from Visible Unmanned Aerial Vehicle Images
[J]. Transactions of the Chinese Society of Agricultural Engineering , 2015 , 31 (5 ): 152 -159 .
[本文引用: 2]
汪小钦 ,王苗苗 ,王绍强 , 等 基于可见光波段无人机遥感的植被信息提取
[J].农业工程学报 ,2015 ,31 (5 ):152 -159 .
[本文引用: 2]
[5]
Bian Xue Ma Qunyu Liu Chuye et al Vegetation Coverage Calculation based on Low Altitude Visible Spectrum
[J]. Bulletin of Soiland Water Conservation , 2017 ,37 (5 ):270 -275 .
[本文引用: 1]
卞雪 ,马群宇 ,刘楚烨 , 等 基于低空可见光谱的植被覆盖率计算
[J].水土保持通报 ,2017 ,37 (5 ):270 -275 .
[本文引用: 1]
[6]
Zhao Jing Yang Huanbo Lan Yubin et al Extraction Method of Summer Corn Vegetation Coverage based on Visible Light Image of Unmanned Aerial Vehicle
[J]. Transactions of the Chinese Society for Agricultural , 2019 ,50 (5 ):232 -240 .
[本文引用: 1]
赵静 ,杨焕波 ,兰玉彬 , 等 基于无人机可见光图像的夏季玉米植被覆盖度提取方法
[J].农业机械学报 ,2019 ,50 (5 ):232 -240 .
[本文引用: 1]
[7]
Liu Shuaibing Yang Guijun Jing Haitao et al Retrieval of Winter Wheat Nitrogen Content based on UAV Digital Image
[J]. Transactions of the Chinese Society of Agricultural Engineering , 2019 , 35 (11 ): 75 -85 .
[本文引用: 1]
刘帅兵 ,杨贵军 ,景海涛 , 等 基于无人机数码影像的冬小麦氮含量反演
[J].农业工程学报 ,2019 ,35 (11 ):75 -85 .
[本文引用: 1]
[8]
Liu Qian Xiao Qing Liu Zhigang et al Image Processing Method of Airborne WiDAS Sensor in WATER Campaign
[J]. Remote Sensing Technology and Application , 2010 ,25 (6 ):797 -804 .
[本文引用: 1]
刘强 ,肖青 ,刘志刚 , 等 黑河综合遥感联合试验中机载WiDAS数据的预处理方法
[J]. 遥感技术与应用 ,2010 ,25 (6 ):797 -804 .
[本文引用: 1]
[9]
Zhang Zhouwei Yu Tao Meng Qingyan et al Image Quality Evaluation of Multi-scale Resampling in Geometric Correction
[J]. Journal of Hua Zhong Normal University(Natural Science Edition) ,2013 ,47 (3 ):426 -430 .
[本文引用: 1]
张周威 ,余涛 ,孟庆岩 ,等 空间重采样方法对遥感影像信息影响研究
[J]. 华中师范大学学报(自然科学版) ,2013 ,47 (3 ):426 -430 .
[本文引用: 1]
[10]
Zhang Chuang Donghui Lü Xu Chaojing Computation for Solar Real-time Position and Its Application in Illuminant Direction of Image
[J]. Electronic Measurement Technology ,2010 ,33 (11 ):87 -89+93 .
[本文引用: 1]
张闯 ,吕东辉 ,顼超静 太阳实时位置计算及在图像光照方向中的应用
[J].电子测量技术 ,2010 ,33 (11 ):87 -89+93 .
[本文引用: 1]
[11]
Wang Guoan Mi Hongtao Deng Tianhong et al Calculation of the Change Range of the Sun High Angle and the Azimuth of Sunrise and Sunset in One Year
[J]. Meteorological and Environmental Sciences ,2007 (S1 ):161 -164 .王国安,米鸿涛,邓天宏, 等.太阳高度角和日出日落时刻太阳方位角一年变化范围的计算[J].气象与环境科学,2007 ():161 -164 .
[本文引用: 1]
[12]
Zhang Xuehong Tian Qingjiu Shen Runping Analysis of Directional Characteristics of Winter Wheat Canopy Spectra
[J]. Spectroscopy and Spectral Analysis , 2010 ,30 (6 ):1600 -1605 .
[本文引用: 1]
张雪红 ,田庆久 ,沈润平 冬小麦冠层光谱的方向性特征分析
[J]. 光谱学与光谱分析 ,2010 ,30 (6 ):1600 -1605 .
[本文引用: 1]
[13]
Xia Xiuli Pan Jie Gao Xiaoqian et al Analysis of the Directional Characteristics of the Reflection Spectrum of Black Pine Canopy
[J]. Spectroscopy and Spectral Analysis ,2019 ,39 (8 ):2540 -2545 .
[本文引用: 1]
夏秀丽 ,潘洁 ,高晓倩 ,等 黑松冠层反射光谱方向特征分析
[J].光谱学与光谱分析 ,2019 ,39 (8 ):2540 -2545 .
[本文引用: 1]
[14]
Jiao Ziti The Use of MODIS BRDF/Albedo Products to Recover Land Surface Properties
[D]. Beijing : Beijing Normal University ,2008 .
[本文引用: 1]
焦子锑 应用MODIS BRDF和反照率产品进行地表特性的研究
[D].北京 :北京师范大学 ,2008 .
[本文引用: 1]
[15]
Gamon J A Surfus J S Assessing Leaf Pigment Content and Activity with a Reflectometer
[J]. New Phytologist , 1999 , 143 (1 ):105 -117 .
[本文引用: 1]
[16]
Sellaro R Crepy M Trupkin S A Cryptochrome as a Sensor of the Blue/Green Ratio of Natural Radiation
[J]. Plant Physiology ,2010 ,154 (1 ):401 -409 .
[本文引用: 1]
[17]
Gitelson A A Kaufman Y J Stark R et al Novel Algorithms for Remote Estimation of Vegetation Fraction
[J]. Remote Sensing of Environment , 2002 , 80 (1 ):76 -87 .
[本文引用: 1]
[18]
Wang Feilong Wang Fumin Hu Jinghui et al Estimating and Mapping Rice Yield Using UAV-Hyperspectral Imager Based Relative Spectral Variates
[J]. Remote Sensing Technology and Application , 2020 , 35 (2 ): 458 -468 .
[本文引用: 1]
王飞龙 ,王福民 ,胡景辉 ,等 基于相对光谱变量的无人机遥感水稻估产及产量制图
[J]. 遥感技术与应用 , 2020 , 35 (2 ): 458 -468 .
[本文引用: 1]
[19]
Xia Yan Huang Liang Wang Xiaoxuan et al Fine Extraction of Tobacco based on UAV Images
[J]. Remote Sensing Technology and Application , 2020 , 35 (5 ): 1158 -1166 .
[本文引用: 1]
夏炎 ,黄亮 ,王枭轩 ,等 基于无人机影像的烟草精细提取
[J]. 遥感技术与应用 , 2020 , 35 (5 ): 1158 -1166 .
[本文引用: 1]
[20]
Shuai Y Tuerhanjiang L Shao C et al Re-understanding of Land Surface Albedo and Related Terms in Satellite-based Retrievals
[J]. Big Earth Data , 2020 (5 ):1 -23 .
[本文引用: 1]
[21]
Cheng Xue He Bingyan Huang Yaohuan et al Estimation of Corn Leaf Area Index based on UAV Hyperspectral Image
[J]. Remote Sensing Technology and Application ,2019 ,34 (4 ):775 -784 .
[本文引用: 1]
程雪 ,贺炳彦 ,黄耀欢 ,等 基于无人机高光谱数据的玉米叶面积指数估算
[J].遥感技术与应用 , 2019 , 34 (4 ):775 -784 .
[本文引用: 1]
农业遥感研究现状与展望
1
2015
... 获取农作物生长过程中的各种农情参数,如作物长势、旱情、产量、物候等,对农业生产的宏观决策和生产安全具有重要意义.而农业生产活动以其空间分布的分散性、时空分布的差异性、灾害的突发性,使得农情监测工作长期以来较为被动[1 ] .使用遥感技术进行农情监测,能够快速、大范围地对农作物进行监测,相比常规的地面监测手段具有很大优势.但是,以传统的航空、航天平台为载体的遥感技术,受制于辐射分辨率、空间分辨率、时间分辨率和大气状况等因素的影响,难以对特定地区及时展开高频次和不同分辨率的近地表多波谱影像数据的采集工作[2 ] .无人机作为新兴的遥感平台,具有灵活性好、作业效率高、操作简便及可搭载多种传感器等特点,能以较低的成本提供精确、实时的局地农作物信息,正逐步成为传统卫星和地面遥感平台的有效补充手段[3 ] . ...
农业遥感研究现状与展望
1
2015
... 获取农作物生长过程中的各种农情参数,如作物长势、旱情、产量、物候等,对农业生产的宏观决策和生产安全具有重要意义.而农业生产活动以其空间分布的分散性、时空分布的差异性、灾害的突发性,使得农情监测工作长期以来较为被动[1 ] .使用遥感技术进行农情监测,能够快速、大范围地对农作物进行监测,相比常规的地面监测手段具有很大优势.但是,以传统的航空、航天平台为载体的遥感技术,受制于辐射分辨率、空间分辨率、时间分辨率和大气状况等因素的影响,难以对特定地区及时展开高频次和不同分辨率的近地表多波谱影像数据的采集工作[2 ] .无人机作为新兴的遥感平台,具有灵活性好、作业效率高、操作简便及可搭载多种传感器等特点,能以较低的成本提供精确、实时的局地农作物信息,正逐步成为传统卫星和地面遥感平台的有效补充手段[3 ] . ...
基于无人机遥感的农作物长势关键参数反演研究进展
1
2018
... 获取农作物生长过程中的各种农情参数,如作物长势、旱情、产量、物候等,对农业生产的宏观决策和生产安全具有重要意义.而农业生产活动以其空间分布的分散性、时空分布的差异性、灾害的突发性,使得农情监测工作长期以来较为被动[1 ] .使用遥感技术进行农情监测,能够快速、大范围地对农作物进行监测,相比常规的地面监测手段具有很大优势.但是,以传统的航空、航天平台为载体的遥感技术,受制于辐射分辨率、空间分辨率、时间分辨率和大气状况等因素的影响,难以对特定地区及时展开高频次和不同分辨率的近地表多波谱影像数据的采集工作[2 ] .无人机作为新兴的遥感平台,具有灵活性好、作业效率高、操作简便及可搭载多种传感器等特点,能以较低的成本提供精确、实时的局地农作物信息,正逐步成为传统卫星和地面遥感平台的有效补充手段[3 ] . ...
基于无人机遥感的农作物长势关键参数反演研究进展
1
2018
... 获取农作物生长过程中的各种农情参数,如作物长势、旱情、产量、物候等,对农业生产的宏观决策和生产安全具有重要意义.而农业生产活动以其空间分布的分散性、时空分布的差异性、灾害的突发性,使得农情监测工作长期以来较为被动[1 ] .使用遥感技术进行农情监测,能够快速、大范围地对农作物进行监测,相比常规的地面监测手段具有很大优势.但是,以传统的航空、航天平台为载体的遥感技术,受制于辐射分辨率、空间分辨率、时间分辨率和大气状况等因素的影响,难以对特定地区及时展开高频次和不同分辨率的近地表多波谱影像数据的采集工作[2 ] .无人机作为新兴的遥感平台,具有灵活性好、作业效率高、操作简便及可搭载多种传感器等特点,能以较低的成本提供精确、实时的局地农作物信息,正逐步成为传统卫星和地面遥感平台的有效补充手段[3 ] . ...
无人机遥感系统的研究进展与应用前景
1
2014
... 获取农作物生长过程中的各种农情参数,如作物长势、旱情、产量、物候等,对农业生产的宏观决策和生产安全具有重要意义.而农业生产活动以其空间分布的分散性、时空分布的差异性、灾害的突发性,使得农情监测工作长期以来较为被动[1 ] .使用遥感技术进行农情监测,能够快速、大范围地对农作物进行监测,相比常规的地面监测手段具有很大优势.但是,以传统的航空、航天平台为载体的遥感技术,受制于辐射分辨率、空间分辨率、时间分辨率和大气状况等因素的影响,难以对特定地区及时展开高频次和不同分辨率的近地表多波谱影像数据的采集工作[2 ] .无人机作为新兴的遥感平台,具有灵活性好、作业效率高、操作简便及可搭载多种传感器等特点,能以较低的成本提供精确、实时的局地农作物信息,正逐步成为传统卫星和地面遥感平台的有效补充手段[3 ] . ...
无人机遥感系统的研究进展与应用前景
1
2014
... 获取农作物生长过程中的各种农情参数,如作物长势、旱情、产量、物候等,对农业生产的宏观决策和生产安全具有重要意义.而农业生产活动以其空间分布的分散性、时空分布的差异性、灾害的突发性,使得农情监测工作长期以来较为被动[1 ] .使用遥感技术进行农情监测,能够快速、大范围地对农作物进行监测,相比常规的地面监测手段具有很大优势.但是,以传统的航空、航天平台为载体的遥感技术,受制于辐射分辨率、空间分辨率、时间分辨率和大气状况等因素的影响,难以对特定地区及时展开高频次和不同分辨率的近地表多波谱影像数据的采集工作[2 ] .无人机作为新兴的遥感平台,具有灵活性好、作业效率高、操作简便及可搭载多种传感器等特点,能以较低的成本提供精确、实时的局地农作物信息,正逐步成为传统卫星和地面遥感平台的有效补充手段[3 ] . ...
基于可见光波段无人机遥感的植被信息提取
2
2015
... 无论是固定翼还是旋翼无人机搭载传感器飞行观测时均有一定的观测几何.这种入照和观测方向上的观测几何可以由多个角度的镜头成像、航线(航向和旁向)重叠或在一幅影像的不同像元间形成.相对于单一方向遥感而言,多角度遥感通过对地面目标多个方向的观测,能够提取出更加丰富的目标参数.但是,在基于无人机遥感应用中,观测角度诱发的潜在误差仍需深入理解.目前,主流的测绘相机仍然是通过获取可见光波谱范围内的红绿蓝(RGB)三波段信息,再结合摄影测量过程中采集的POS数据,提取出地形特征点的位置信息.除了位置信息,近年来无人机遥感越来越多的被用于波谱数据采集和信息提取.汪小钦等[4 ] 借鉴归一化植被指数原理提出可见光波段差异植被指数(VDVI,Visible-band Difference Vegetation Index)并用于提取植被信息,取得较好效果.卞雪等[5 ] 利用可见光波段提取出的红绿比值指数(RGRI,Red Green Ratio Index)、过绿指数(EXG,Excess Green)、归一化绿红差值指数(NGRDI,Normalized Green-Red Difference Index)、归一化绿蓝差值指数(NGBDI,Normalized Green-Blue Difference Index)等计算植被覆盖度,并与可见光波段差异植被指数(VDVI)计算出的结果相比较,指出基于VDVI植被指数的计算精度最高.赵静等[6 ] 利用过绿指数(EXG)、归一化绿蓝差值指数(NGBDI)和可见光波段差异植被指数结合监督分类提取了玉米4个时期的植被覆盖度信息,指出过绿指数(EXG)的提取效果最好.刘帅兵等[7 ] 将提取出的可见光波段差异植被指数与各试验区冬小麦的氮含量进行相关性分析,对基于RGB三波段信息的冬小麦氮含量反演进行了研究. ...
... 尽管可见光波段无法体现近红外波段的反射陡峰,但是绿色植被在可见光的3个波段仍然表现出一定的波谱特性.因此,在可见光波段仍然可以提取出一些植被指数,如绿红比值指数GRRI[15 ] ,绿蓝比值指数GBRI[16 ] ,归一化绿红差异指数NGRDI[17 ] ,可见光波段差异植被指数VDVI[4 ] 等.根据实验过程中提取出的多角度、多波段信息,由每个实验样方对应的25个观测方位的红(R)、绿(G)、蓝(B)三波段方向反射率可以直接计算出这些可见光植被指数,其计算方法见公式(7 )~(10 ),统计由不同观测方位计算得到的植被指数偏差(表5 ). ...
基于可见光波段无人机遥感的植被信息提取
2
2015
... 无论是固定翼还是旋翼无人机搭载传感器飞行观测时均有一定的观测几何.这种入照和观测方向上的观测几何可以由多个角度的镜头成像、航线(航向和旁向)重叠或在一幅影像的不同像元间形成.相对于单一方向遥感而言,多角度遥感通过对地面目标多个方向的观测,能够提取出更加丰富的目标参数.但是,在基于无人机遥感应用中,观测角度诱发的潜在误差仍需深入理解.目前,主流的测绘相机仍然是通过获取可见光波谱范围内的红绿蓝(RGB)三波段信息,再结合摄影测量过程中采集的POS数据,提取出地形特征点的位置信息.除了位置信息,近年来无人机遥感越来越多的被用于波谱数据采集和信息提取.汪小钦等[4 ] 借鉴归一化植被指数原理提出可见光波段差异植被指数(VDVI,Visible-band Difference Vegetation Index)并用于提取植被信息,取得较好效果.卞雪等[5 ] 利用可见光波段提取出的红绿比值指数(RGRI,Red Green Ratio Index)、过绿指数(EXG,Excess Green)、归一化绿红差值指数(NGRDI,Normalized Green-Red Difference Index)、归一化绿蓝差值指数(NGBDI,Normalized Green-Blue Difference Index)等计算植被覆盖度,并与可见光波段差异植被指数(VDVI)计算出的结果相比较,指出基于VDVI植被指数的计算精度最高.赵静等[6 ] 利用过绿指数(EXG)、归一化绿蓝差值指数(NGBDI)和可见光波段差异植被指数结合监督分类提取了玉米4个时期的植被覆盖度信息,指出过绿指数(EXG)的提取效果最好.刘帅兵等[7 ] 将提取出的可见光波段差异植被指数与各试验区冬小麦的氮含量进行相关性分析,对基于RGB三波段信息的冬小麦氮含量反演进行了研究. ...
... 尽管可见光波段无法体现近红外波段的反射陡峰,但是绿色植被在可见光的3个波段仍然表现出一定的波谱特性.因此,在可见光波段仍然可以提取出一些植被指数,如绿红比值指数GRRI[15 ] ,绿蓝比值指数GBRI[16 ] ,归一化绿红差异指数NGRDI[17 ] ,可见光波段差异植被指数VDVI[4 ] 等.根据实验过程中提取出的多角度、多波段信息,由每个实验样方对应的25个观测方位的红(R)、绿(G)、蓝(B)三波段方向反射率可以直接计算出这些可见光植被指数,其计算方法见公式(7 )~(10 ),统计由不同观测方位计算得到的植被指数偏差(表5 ). ...
基于低空可见光谱的植被覆盖率计算
1
2017
... 无论是固定翼还是旋翼无人机搭载传感器飞行观测时均有一定的观测几何.这种入照和观测方向上的观测几何可以由多个角度的镜头成像、航线(航向和旁向)重叠或在一幅影像的不同像元间形成.相对于单一方向遥感而言,多角度遥感通过对地面目标多个方向的观测,能够提取出更加丰富的目标参数.但是,在基于无人机遥感应用中,观测角度诱发的潜在误差仍需深入理解.目前,主流的测绘相机仍然是通过获取可见光波谱范围内的红绿蓝(RGB)三波段信息,再结合摄影测量过程中采集的POS数据,提取出地形特征点的位置信息.除了位置信息,近年来无人机遥感越来越多的被用于波谱数据采集和信息提取.汪小钦等[4 ] 借鉴归一化植被指数原理提出可见光波段差异植被指数(VDVI,Visible-band Difference Vegetation Index)并用于提取植被信息,取得较好效果.卞雪等[5 ] 利用可见光波段提取出的红绿比值指数(RGRI,Red Green Ratio Index)、过绿指数(EXG,Excess Green)、归一化绿红差值指数(NGRDI,Normalized Green-Red Difference Index)、归一化绿蓝差值指数(NGBDI,Normalized Green-Blue Difference Index)等计算植被覆盖度,并与可见光波段差异植被指数(VDVI)计算出的结果相比较,指出基于VDVI植被指数的计算精度最高.赵静等[6 ] 利用过绿指数(EXG)、归一化绿蓝差值指数(NGBDI)和可见光波段差异植被指数结合监督分类提取了玉米4个时期的植被覆盖度信息,指出过绿指数(EXG)的提取效果最好.刘帅兵等[7 ] 将提取出的可见光波段差异植被指数与各试验区冬小麦的氮含量进行相关性分析,对基于RGB三波段信息的冬小麦氮含量反演进行了研究. ...
基于低空可见光谱的植被覆盖率计算
1
2017
... 无论是固定翼还是旋翼无人机搭载传感器飞行观测时均有一定的观测几何.这种入照和观测方向上的观测几何可以由多个角度的镜头成像、航线(航向和旁向)重叠或在一幅影像的不同像元间形成.相对于单一方向遥感而言,多角度遥感通过对地面目标多个方向的观测,能够提取出更加丰富的目标参数.但是,在基于无人机遥感应用中,观测角度诱发的潜在误差仍需深入理解.目前,主流的测绘相机仍然是通过获取可见光波谱范围内的红绿蓝(RGB)三波段信息,再结合摄影测量过程中采集的POS数据,提取出地形特征点的位置信息.除了位置信息,近年来无人机遥感越来越多的被用于波谱数据采集和信息提取.汪小钦等[4 ] 借鉴归一化植被指数原理提出可见光波段差异植被指数(VDVI,Visible-band Difference Vegetation Index)并用于提取植被信息,取得较好效果.卞雪等[5 ] 利用可见光波段提取出的红绿比值指数(RGRI,Red Green Ratio Index)、过绿指数(EXG,Excess Green)、归一化绿红差值指数(NGRDI,Normalized Green-Red Difference Index)、归一化绿蓝差值指数(NGBDI,Normalized Green-Blue Difference Index)等计算植被覆盖度,并与可见光波段差异植被指数(VDVI)计算出的结果相比较,指出基于VDVI植被指数的计算精度最高.赵静等[6 ] 利用过绿指数(EXG)、归一化绿蓝差值指数(NGBDI)和可见光波段差异植被指数结合监督分类提取了玉米4个时期的植被覆盖度信息,指出过绿指数(EXG)的提取效果最好.刘帅兵等[7 ] 将提取出的可见光波段差异植被指数与各试验区冬小麦的氮含量进行相关性分析,对基于RGB三波段信息的冬小麦氮含量反演进行了研究. ...
基于无人机可见光图像的夏季玉米植被覆盖度提取方法
1
2019
... 无论是固定翼还是旋翼无人机搭载传感器飞行观测时均有一定的观测几何.这种入照和观测方向上的观测几何可以由多个角度的镜头成像、航线(航向和旁向)重叠或在一幅影像的不同像元间形成.相对于单一方向遥感而言,多角度遥感通过对地面目标多个方向的观测,能够提取出更加丰富的目标参数.但是,在基于无人机遥感应用中,观测角度诱发的潜在误差仍需深入理解.目前,主流的测绘相机仍然是通过获取可见光波谱范围内的红绿蓝(RGB)三波段信息,再结合摄影测量过程中采集的POS数据,提取出地形特征点的位置信息.除了位置信息,近年来无人机遥感越来越多的被用于波谱数据采集和信息提取.汪小钦等[4 ] 借鉴归一化植被指数原理提出可见光波段差异植被指数(VDVI,Visible-band Difference Vegetation Index)并用于提取植被信息,取得较好效果.卞雪等[5 ] 利用可见光波段提取出的红绿比值指数(RGRI,Red Green Ratio Index)、过绿指数(EXG,Excess Green)、归一化绿红差值指数(NGRDI,Normalized Green-Red Difference Index)、归一化绿蓝差值指数(NGBDI,Normalized Green-Blue Difference Index)等计算植被覆盖度,并与可见光波段差异植被指数(VDVI)计算出的结果相比较,指出基于VDVI植被指数的计算精度最高.赵静等[6 ] 利用过绿指数(EXG)、归一化绿蓝差值指数(NGBDI)和可见光波段差异植被指数结合监督分类提取了玉米4个时期的植被覆盖度信息,指出过绿指数(EXG)的提取效果最好.刘帅兵等[7 ] 将提取出的可见光波段差异植被指数与各试验区冬小麦的氮含量进行相关性分析,对基于RGB三波段信息的冬小麦氮含量反演进行了研究. ...
基于无人机可见光图像的夏季玉米植被覆盖度提取方法
1
2019
... 无论是固定翼还是旋翼无人机搭载传感器飞行观测时均有一定的观测几何.这种入照和观测方向上的观测几何可以由多个角度的镜头成像、航线(航向和旁向)重叠或在一幅影像的不同像元间形成.相对于单一方向遥感而言,多角度遥感通过对地面目标多个方向的观测,能够提取出更加丰富的目标参数.但是,在基于无人机遥感应用中,观测角度诱发的潜在误差仍需深入理解.目前,主流的测绘相机仍然是通过获取可见光波谱范围内的红绿蓝(RGB)三波段信息,再结合摄影测量过程中采集的POS数据,提取出地形特征点的位置信息.除了位置信息,近年来无人机遥感越来越多的被用于波谱数据采集和信息提取.汪小钦等[4 ] 借鉴归一化植被指数原理提出可见光波段差异植被指数(VDVI,Visible-band Difference Vegetation Index)并用于提取植被信息,取得较好效果.卞雪等[5 ] 利用可见光波段提取出的红绿比值指数(RGRI,Red Green Ratio Index)、过绿指数(EXG,Excess Green)、归一化绿红差值指数(NGRDI,Normalized Green-Red Difference Index)、归一化绿蓝差值指数(NGBDI,Normalized Green-Blue Difference Index)等计算植被覆盖度,并与可见光波段差异植被指数(VDVI)计算出的结果相比较,指出基于VDVI植被指数的计算精度最高.赵静等[6 ] 利用过绿指数(EXG)、归一化绿蓝差值指数(NGBDI)和可见光波段差异植被指数结合监督分类提取了玉米4个时期的植被覆盖度信息,指出过绿指数(EXG)的提取效果最好.刘帅兵等[7 ] 将提取出的可见光波段差异植被指数与各试验区冬小麦的氮含量进行相关性分析,对基于RGB三波段信息的冬小麦氮含量反演进行了研究. ...
基于无人机数码影像的冬小麦氮含量反演
1
2019
... 无论是固定翼还是旋翼无人机搭载传感器飞行观测时均有一定的观测几何.这种入照和观测方向上的观测几何可以由多个角度的镜头成像、航线(航向和旁向)重叠或在一幅影像的不同像元间形成.相对于单一方向遥感而言,多角度遥感通过对地面目标多个方向的观测,能够提取出更加丰富的目标参数.但是,在基于无人机遥感应用中,观测角度诱发的潜在误差仍需深入理解.目前,主流的测绘相机仍然是通过获取可见光波谱范围内的红绿蓝(RGB)三波段信息,再结合摄影测量过程中采集的POS数据,提取出地形特征点的位置信息.除了位置信息,近年来无人机遥感越来越多的被用于波谱数据采集和信息提取.汪小钦等[4 ] 借鉴归一化植被指数原理提出可见光波段差异植被指数(VDVI,Visible-band Difference Vegetation Index)并用于提取植被信息,取得较好效果.卞雪等[5 ] 利用可见光波段提取出的红绿比值指数(RGRI,Red Green Ratio Index)、过绿指数(EXG,Excess Green)、归一化绿红差值指数(NGRDI,Normalized Green-Red Difference Index)、归一化绿蓝差值指数(NGBDI,Normalized Green-Blue Difference Index)等计算植被覆盖度,并与可见光波段差异植被指数(VDVI)计算出的结果相比较,指出基于VDVI植被指数的计算精度最高.赵静等[6 ] 利用过绿指数(EXG)、归一化绿蓝差值指数(NGBDI)和可见光波段差异植被指数结合监督分类提取了玉米4个时期的植被覆盖度信息,指出过绿指数(EXG)的提取效果最好.刘帅兵等[7 ] 将提取出的可见光波段差异植被指数与各试验区冬小麦的氮含量进行相关性分析,对基于RGB三波段信息的冬小麦氮含量反演进行了研究. ...
基于无人机数码影像的冬小麦氮含量反演
1
2019
... 无论是固定翼还是旋翼无人机搭载传感器飞行观测时均有一定的观测几何.这种入照和观测方向上的观测几何可以由多个角度的镜头成像、航线(航向和旁向)重叠或在一幅影像的不同像元间形成.相对于单一方向遥感而言,多角度遥感通过对地面目标多个方向的观测,能够提取出更加丰富的目标参数.但是,在基于无人机遥感应用中,观测角度诱发的潜在误差仍需深入理解.目前,主流的测绘相机仍然是通过获取可见光波谱范围内的红绿蓝(RGB)三波段信息,再结合摄影测量过程中采集的POS数据,提取出地形特征点的位置信息.除了位置信息,近年来无人机遥感越来越多的被用于波谱数据采集和信息提取.汪小钦等[4 ] 借鉴归一化植被指数原理提出可见光波段差异植被指数(VDVI,Visible-band Difference Vegetation Index)并用于提取植被信息,取得较好效果.卞雪等[5 ] 利用可见光波段提取出的红绿比值指数(RGRI,Red Green Ratio Index)、过绿指数(EXG,Excess Green)、归一化绿红差值指数(NGRDI,Normalized Green-Red Difference Index)、归一化绿蓝差值指数(NGBDI,Normalized Green-Blue Difference Index)等计算植被覆盖度,并与可见光波段差异植被指数(VDVI)计算出的结果相比较,指出基于VDVI植被指数的计算精度最高.赵静等[6 ] 利用过绿指数(EXG)、归一化绿蓝差值指数(NGBDI)和可见光波段差异植被指数结合监督分类提取了玉米4个时期的植被覆盖度信息,指出过绿指数(EXG)的提取效果最好.刘帅兵等[7 ] 将提取出的可见光波段差异植被指数与各试验区冬小麦的氮含量进行相关性分析,对基于RGB三波段信息的冬小麦氮含量反演进行了研究. ...
黑河综合遥感联合试验中机载WiDAS数据的预处理方法
1
2010
... 在此基础上,根据实验样方的中心位置(XL,YL,ZL)与传感器的中心位置(X,Y,Z),由公式(1 )~(3 )可以解算出传感器的观测天顶角θ φ [8 ] ,结果见图8 . ...
黑河综合遥感联合试验中机载WiDAS数据的预处理方法
1
2010
... 在此基础上,根据实验样方的中心位置(XL,YL,ZL)与传感器的中心位置(X,Y,Z),由公式(1 )~(3 )可以解算出传感器的观测天顶角θ φ [8 ] ,结果见图8 . ...
空间重采样方法对遥感影像信息影响研究
1
2013
... 在获取区域DOM影像的基础上,将航摄影像纠正为单幅DOM影像,使用ENVI软件将样方标示为ROI区域(大小为100像元×100像元),对ROI区域内的像元DN值进行分析,提取出各波段DN值的均值信息.虽然纠正后的单幅DOM影像进行了重采样,但是对样方级别的影像DN均值而言,其影响非常微小[9 ] . ...
空间重采样方法对遥感影像信息影响研究
1
2013
... 在获取区域DOM影像的基础上,将航摄影像纠正为单幅DOM影像,使用ENVI软件将样方标示为ROI区域(大小为100像元×100像元),对ROI区域内的像元DN值进行分析,提取出各波段DN值的均值信息.虽然纠正后的单幅DOM影像进行了重采样,但是对样方级别的影像DN均值而言,其影响非常微小[9 ] . ...
太阳实时位置计算及在图像光照方向中的应用
1
2010
... 对于实验区域内的水稻样方而言,太阳天顶角是指太阳光的入射方向和样方地表切面法线方向之间的夹角.太阳天顶角与太阳辐射强度紧密相联,中午12点左右的太阳天顶角是一天中的最小值,此时太阳辐射强度最大.太阳方位角是以目标物的地理正北为零,按顺时针旋转,与太阳光入射方向在地表的投影射线所形成的夹角.对北半球而言,早晨太阳方位角在90°左右,中午在180°左右,落日时太阳方位角为270°度左右.当然,在一年当中,这些数据都有一定的波动.太阳天顶角和方位角的计算[10 -11 ] 见公式(4 )~(5 ). ...
太阳实时位置计算及在图像光照方向中的应用
1
2010
... 对于实验区域内的水稻样方而言,太阳天顶角是指太阳光的入射方向和样方地表切面法线方向之间的夹角.太阳天顶角与太阳辐射强度紧密相联,中午12点左右的太阳天顶角是一天中的最小值,此时太阳辐射强度最大.太阳方位角是以目标物的地理正北为零,按顺时针旋转,与太阳光入射方向在地表的投影射线所形成的夹角.对北半球而言,早晨太阳方位角在90°左右,中午在180°左右,落日时太阳方位角为270°度左右.当然,在一年当中,这些数据都有一定的波动.太阳天顶角和方位角的计算[10 -11 ] 见公式(4 )~(5 ). ...
Calculation of the Change Range of the Sun High Angle and the Azimuth of Sunrise and Sunset in One Year
1
2007
... 对于实验区域内的水稻样方而言,太阳天顶角是指太阳光的入射方向和样方地表切面法线方向之间的夹角.太阳天顶角与太阳辐射强度紧密相联,中午12点左右的太阳天顶角是一天中的最小值,此时太阳辐射强度最大.太阳方位角是以目标物的地理正北为零,按顺时针旋转,与太阳光入射方向在地表的投影射线所形成的夹角.对北半球而言,早晨太阳方位角在90°左右,中午在180°左右,落日时太阳方位角为270°度左右.当然,在一年当中,这些数据都有一定的波动.太阳天顶角和方位角的计算[10 -11 ] 见公式(4 )~(5 ). ...
冬小麦冠层光谱的方向性特征分析
1
2010
... 不同于单株农作物,样方内的水稻具体有行播作物特点.因此,结合太阳方位(方位角262.83°)和水稻垄向,从前向、后向(太阳在观测者背后称之为后向观测,反之为前向观测[12 ] )及顺垄(方位角150.00°)和垂直垄方向(方位角240.00°)考察样方的方向反射特点.根据两个样方(见图7 所示位置)获取的有效角度采样,用双三次插值方法拟合出水稻样方冠层的方向反射率.如图9 所示,为覆盖样方1(a)~(c)和样方2(d)~(f)的红(R)、绿(G)、蓝(B)光波段的多角度观测拟合图. ...
冬小麦冠层光谱的方向性特征分析
1
2010
... 不同于单株农作物,样方内的水稻具体有行播作物特点.因此,结合太阳方位(方位角262.83°)和水稻垄向,从前向、后向(太阳在观测者背后称之为后向观测,反之为前向观测[12 ] )及顺垄(方位角150.00°)和垂直垄方向(方位角240.00°)考察样方的方向反射特点.根据两个样方(见图7 所示位置)获取的有效角度采样,用双三次插值方法拟合出水稻样方冠层的方向反射率.如图9 所示,为覆盖样方1(a)~(c)和样方2(d)~(f)的红(R)、绿(G)、蓝(B)光波段的多角度观测拟合图. ...
黑松冠层反射光谱方向特征分析
1
2019
... 从图9 可看出:①两个样方均表明绿光波段在主平面后向反射方位,尤其是热点附近反射明显高于其他方向,而且随着观测角度的增加后向反射继续增强,这与扬花期水稻冠层在绿光波段具有较强的反射特性息息相关.而在反射率较低的蓝和红波段未捕获到明显热点;②对反射率较高的绿波段而言,反射率峰值出现在后向热点方位;而蓝红两个波段其反射率峰值出现在顺垄一侧方向,这或与水稻生长发育和田间管理息息相关.为保证有效养分输送和光合作用,扬花期稻田仍需持有浅层薄水,水体反射行播作物的特定方向易进入观测视场,加强该方向的反射;③除去热点效应和部分反射率峰值,观测天顶角对方向反射率仍有重要影响,随着观测天顶角的增大,反射率强度也随之减小.做出水稻样方在主平面、垂直主平面、垂垄平面、顺垄平面的方向反射率曲线(图10 ),并采用每条曲线的各向异性指数对观测平面进行定量分析[13 -14 ] ,其计算方法为公式(6) ,具体结果见表4 . ...
黑松冠层反射光谱方向特征分析
1
2019
... 从图9 可看出:①两个样方均表明绿光波段在主平面后向反射方位,尤其是热点附近反射明显高于其他方向,而且随着观测角度的增加后向反射继续增强,这与扬花期水稻冠层在绿光波段具有较强的反射特性息息相关.而在反射率较低的蓝和红波段未捕获到明显热点;②对反射率较高的绿波段而言,反射率峰值出现在后向热点方位;而蓝红两个波段其反射率峰值出现在顺垄一侧方向,这或与水稻生长发育和田间管理息息相关.为保证有效养分输送和光合作用,扬花期稻田仍需持有浅层薄水,水体反射行播作物的特定方向易进入观测视场,加强该方向的反射;③除去热点效应和部分反射率峰值,观测天顶角对方向反射率仍有重要影响,随着观测天顶角的增大,反射率强度也随之减小.做出水稻样方在主平面、垂直主平面、垂垄平面、顺垄平面的方向反射率曲线(图10 ),并采用每条曲线的各向异性指数对观测平面进行定量分析[13 -14 ] ,其计算方法为公式(6) ,具体结果见表4 . ...
应用MODIS BRDF和反照率产品进行地表特性的研究
1
2008
... 从图9 可看出:①两个样方均表明绿光波段在主平面后向反射方位,尤其是热点附近反射明显高于其他方向,而且随着观测角度的增加后向反射继续增强,这与扬花期水稻冠层在绿光波段具有较强的反射特性息息相关.而在反射率较低的蓝和红波段未捕获到明显热点;②对反射率较高的绿波段而言,反射率峰值出现在后向热点方位;而蓝红两个波段其反射率峰值出现在顺垄一侧方向,这或与水稻生长发育和田间管理息息相关.为保证有效养分输送和光合作用,扬花期稻田仍需持有浅层薄水,水体反射行播作物的特定方向易进入观测视场,加强该方向的反射;③除去热点效应和部分反射率峰值,观测天顶角对方向反射率仍有重要影响,随着观测天顶角的增大,反射率强度也随之减小.做出水稻样方在主平面、垂直主平面、垂垄平面、顺垄平面的方向反射率曲线(图10 ),并采用每条曲线的各向异性指数对观测平面进行定量分析[13 -14 ] ,其计算方法为公式(6) ,具体结果见表4 . ...
应用MODIS BRDF和反照率产品进行地表特性的研究
1
2008
... 从图9 可看出:①两个样方均表明绿光波段在主平面后向反射方位,尤其是热点附近反射明显高于其他方向,而且随着观测角度的增加后向反射继续增强,这与扬花期水稻冠层在绿光波段具有较强的反射特性息息相关.而在反射率较低的蓝和红波段未捕获到明显热点;②对反射率较高的绿波段而言,反射率峰值出现在后向热点方位;而蓝红两个波段其反射率峰值出现在顺垄一侧方向,这或与水稻生长发育和田间管理息息相关.为保证有效养分输送和光合作用,扬花期稻田仍需持有浅层薄水,水体反射行播作物的特定方向易进入观测视场,加强该方向的反射;③除去热点效应和部分反射率峰值,观测天顶角对方向反射率仍有重要影响,随着观测天顶角的增大,反射率强度也随之减小.做出水稻样方在主平面、垂直主平面、垂垄平面、顺垄平面的方向反射率曲线(图10 ),并采用每条曲线的各向异性指数对观测平面进行定量分析[13 -14 ] ,其计算方法为公式(6) ,具体结果见表4 . ...
Assessing Leaf Pigment Content and Activity with a Reflectometer
1
1999
... 尽管可见光波段无法体现近红外波段的反射陡峰,但是绿色植被在可见光的3个波段仍然表现出一定的波谱特性.因此,在可见光波段仍然可以提取出一些植被指数,如绿红比值指数GRRI[15 ] ,绿蓝比值指数GBRI[16 ] ,归一化绿红差异指数NGRDI[17 ] ,可见光波段差异植被指数VDVI[4 ] 等.根据实验过程中提取出的多角度、多波段信息,由每个实验样方对应的25个观测方位的红(R)、绿(G)、蓝(B)三波段方向反射率可以直接计算出这些可见光植被指数,其计算方法见公式(7 )~(10 ),统计由不同观测方位计算得到的植被指数偏差(表5 ). ...
Cryptochrome as a Sensor of the Blue/Green Ratio of Natural Radiation
1
2010
... 尽管可见光波段无法体现近红外波段的反射陡峰,但是绿色植被在可见光的3个波段仍然表现出一定的波谱特性.因此,在可见光波段仍然可以提取出一些植被指数,如绿红比值指数GRRI[15 ] ,绿蓝比值指数GBRI[16 ] ,归一化绿红差异指数NGRDI[17 ] ,可见光波段差异植被指数VDVI[4 ] 等.根据实验过程中提取出的多角度、多波段信息,由每个实验样方对应的25个观测方位的红(R)、绿(G)、蓝(B)三波段方向反射率可以直接计算出这些可见光植被指数,其计算方法见公式(7 )~(10 ),统计由不同观测方位计算得到的植被指数偏差(表5 ). ...
Novel Algorithms for Remote Estimation of Vegetation Fraction
1
2002
... 尽管可见光波段无法体现近红外波段的反射陡峰,但是绿色植被在可见光的3个波段仍然表现出一定的波谱特性.因此,在可见光波段仍然可以提取出一些植被指数,如绿红比值指数GRRI[15 ] ,绿蓝比值指数GBRI[16 ] ,归一化绿红差异指数NGRDI[17 ] ,可见光波段差异植被指数VDVI[4 ] 等.根据实验过程中提取出的多角度、多波段信息,由每个实验样方对应的25个观测方位的红(R)、绿(G)、蓝(B)三波段方向反射率可以直接计算出这些可见光植被指数,其计算方法见公式(7 )~(10 ),统计由不同观测方位计算得到的植被指数偏差(表5 ). ...
基于相对光谱变量的无人机遥感水稻估产及产量制图
1
2020
... 无人机遥感应用于农情监测领域,具有一些独特的优势,如低成本、灵活性高、受大气状况影响小等,能够快速、精准的获得局地农作物信息[18 -19 ] .但是,由无人机观测几何诱发的方向反射存在一定程度的差异,而且会传递到后续的植被指数中.这种波谱反射差异对农情和农作物的定量研究具有无法忽视的潜在影响[20 ] ,程雪等[21 ] 的研究结果表明,一定范围内的光谱反射率变化,即可对反演出的叶面积指数(Leaf Area Index,LAI)产生较大影响.本文以扬花期水稻大田样方为目标,提取了不同观测几何下的水稻样方冠层的多波段反射率,定量分析了多角度条件下的方向反射差异及其对后续植被指数提取的影响,警示我们在研究过程中,必须对由观测几何造成的方向反射差异进行角度效应纠正.限于航摄相机仅能在可见光波段获取红(R)、绿(G)、蓝(B)三波段的反射信息,而且水稻样方正处于扬花期,需要进一步研究水稻冠层和其他农作物在不同生育期或地表覆被类型的多角度反射特点及其有效纠正方法. ...
基于相对光谱变量的无人机遥感水稻估产及产量制图
1
2020
... 无人机遥感应用于农情监测领域,具有一些独特的优势,如低成本、灵活性高、受大气状况影响小等,能够快速、精准的获得局地农作物信息[18 -19 ] .但是,由无人机观测几何诱发的方向反射存在一定程度的差异,而且会传递到后续的植被指数中.这种波谱反射差异对农情和农作物的定量研究具有无法忽视的潜在影响[20 ] ,程雪等[21 ] 的研究结果表明,一定范围内的光谱反射率变化,即可对反演出的叶面积指数(Leaf Area Index,LAI)产生较大影响.本文以扬花期水稻大田样方为目标,提取了不同观测几何下的水稻样方冠层的多波段反射率,定量分析了多角度条件下的方向反射差异及其对后续植被指数提取的影响,警示我们在研究过程中,必须对由观测几何造成的方向反射差异进行角度效应纠正.限于航摄相机仅能在可见光波段获取红(R)、绿(G)、蓝(B)三波段的反射信息,而且水稻样方正处于扬花期,需要进一步研究水稻冠层和其他农作物在不同生育期或地表覆被类型的多角度反射特点及其有效纠正方法. ...
基于无人机影像的烟草精细提取
1
2020
... 无人机遥感应用于农情监测领域,具有一些独特的优势,如低成本、灵活性高、受大气状况影响小等,能够快速、精准的获得局地农作物信息[18 -19 ] .但是,由无人机观测几何诱发的方向反射存在一定程度的差异,而且会传递到后续的植被指数中.这种波谱反射差异对农情和农作物的定量研究具有无法忽视的潜在影响[20 ] ,程雪等[21 ] 的研究结果表明,一定范围内的光谱反射率变化,即可对反演出的叶面积指数(Leaf Area Index,LAI)产生较大影响.本文以扬花期水稻大田样方为目标,提取了不同观测几何下的水稻样方冠层的多波段反射率,定量分析了多角度条件下的方向反射差异及其对后续植被指数提取的影响,警示我们在研究过程中,必须对由观测几何造成的方向反射差异进行角度效应纠正.限于航摄相机仅能在可见光波段获取红(R)、绿(G)、蓝(B)三波段的反射信息,而且水稻样方正处于扬花期,需要进一步研究水稻冠层和其他农作物在不同生育期或地表覆被类型的多角度反射特点及其有效纠正方法. ...
基于无人机影像的烟草精细提取
1
2020
... 无人机遥感应用于农情监测领域,具有一些独特的优势,如低成本、灵活性高、受大气状况影响小等,能够快速、精准的获得局地农作物信息[18 -19 ] .但是,由无人机观测几何诱发的方向反射存在一定程度的差异,而且会传递到后续的植被指数中.这种波谱反射差异对农情和农作物的定量研究具有无法忽视的潜在影响[20 ] ,程雪等[21 ] 的研究结果表明,一定范围内的光谱反射率变化,即可对反演出的叶面积指数(Leaf Area Index,LAI)产生较大影响.本文以扬花期水稻大田样方为目标,提取了不同观测几何下的水稻样方冠层的多波段反射率,定量分析了多角度条件下的方向反射差异及其对后续植被指数提取的影响,警示我们在研究过程中,必须对由观测几何造成的方向反射差异进行角度效应纠正.限于航摄相机仅能在可见光波段获取红(R)、绿(G)、蓝(B)三波段的反射信息,而且水稻样方正处于扬花期,需要进一步研究水稻冠层和其他农作物在不同生育期或地表覆被类型的多角度反射特点及其有效纠正方法. ...
Re-understanding of Land Surface Albedo and Related Terms in Satellite-based Retrievals
1
2020
... 无人机遥感应用于农情监测领域,具有一些独特的优势,如低成本、灵活性高、受大气状况影响小等,能够快速、精准的获得局地农作物信息[18 -19 ] .但是,由无人机观测几何诱发的方向反射存在一定程度的差异,而且会传递到后续的植被指数中.这种波谱反射差异对农情和农作物的定量研究具有无法忽视的潜在影响[20 ] ,程雪等[21 ] 的研究结果表明,一定范围内的光谱反射率变化,即可对反演出的叶面积指数(Leaf Area Index,LAI)产生较大影响.本文以扬花期水稻大田样方为目标,提取了不同观测几何下的水稻样方冠层的多波段反射率,定量分析了多角度条件下的方向反射差异及其对后续植被指数提取的影响,警示我们在研究过程中,必须对由观测几何造成的方向反射差异进行角度效应纠正.限于航摄相机仅能在可见光波段获取红(R)、绿(G)、蓝(B)三波段的反射信息,而且水稻样方正处于扬花期,需要进一步研究水稻冠层和其他农作物在不同生育期或地表覆被类型的多角度反射特点及其有效纠正方法. ...
基于无人机高光谱数据的玉米叶面积指数估算
1
2019
... 无人机遥感应用于农情监测领域,具有一些独特的优势,如低成本、灵活性高、受大气状况影响小等,能够快速、精准的获得局地农作物信息[18 -19 ] .但是,由无人机观测几何诱发的方向反射存在一定程度的差异,而且会传递到后续的植被指数中.这种波谱反射差异对农情和农作物的定量研究具有无法忽视的潜在影响[20 ] ,程雪等[21 ] 的研究结果表明,一定范围内的光谱反射率变化,即可对反演出的叶面积指数(Leaf Area Index,LAI)产生较大影响.本文以扬花期水稻大田样方为目标,提取了不同观测几何下的水稻样方冠层的多波段反射率,定量分析了多角度条件下的方向反射差异及其对后续植被指数提取的影响,警示我们在研究过程中,必须对由观测几何造成的方向反射差异进行角度效应纠正.限于航摄相机仅能在可见光波段获取红(R)、绿(G)、蓝(B)三波段的反射信息,而且水稻样方正处于扬花期,需要进一步研究水稻冠层和其他农作物在不同生育期或地表覆被类型的多角度反射特点及其有效纠正方法. ...
基于无人机高光谱数据的玉米叶面积指数估算
1
2019
... 无人机遥感应用于农情监测领域,具有一些独特的优势,如低成本、灵活性高、受大气状况影响小等,能够快速、精准的获得局地农作物信息[18 -19 ] .但是,由无人机观测几何诱发的方向反射存在一定程度的差异,而且会传递到后续的植被指数中.这种波谱反射差异对农情和农作物的定量研究具有无法忽视的潜在影响[20 ] ,程雪等[21 ] 的研究结果表明,一定范围内的光谱反射率变化,即可对反演出的叶面积指数(Leaf Area Index,LAI)产生较大影响.本文以扬花期水稻大田样方为目标,提取了不同观测几何下的水稻样方冠层的多波段反射率,定量分析了多角度条件下的方向反射差异及其对后续植被指数提取的影响,警示我们在研究过程中,必须对由观测几何造成的方向反射差异进行角度效应纠正.限于航摄相机仅能在可见光波段获取红(R)、绿(G)、蓝(B)三波段的反射信息,而且水稻样方正处于扬花期,需要进一步研究水稻冠层和其他农作物在不同生育期或地表覆被类型的多角度反射特点及其有效纠正方法. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}