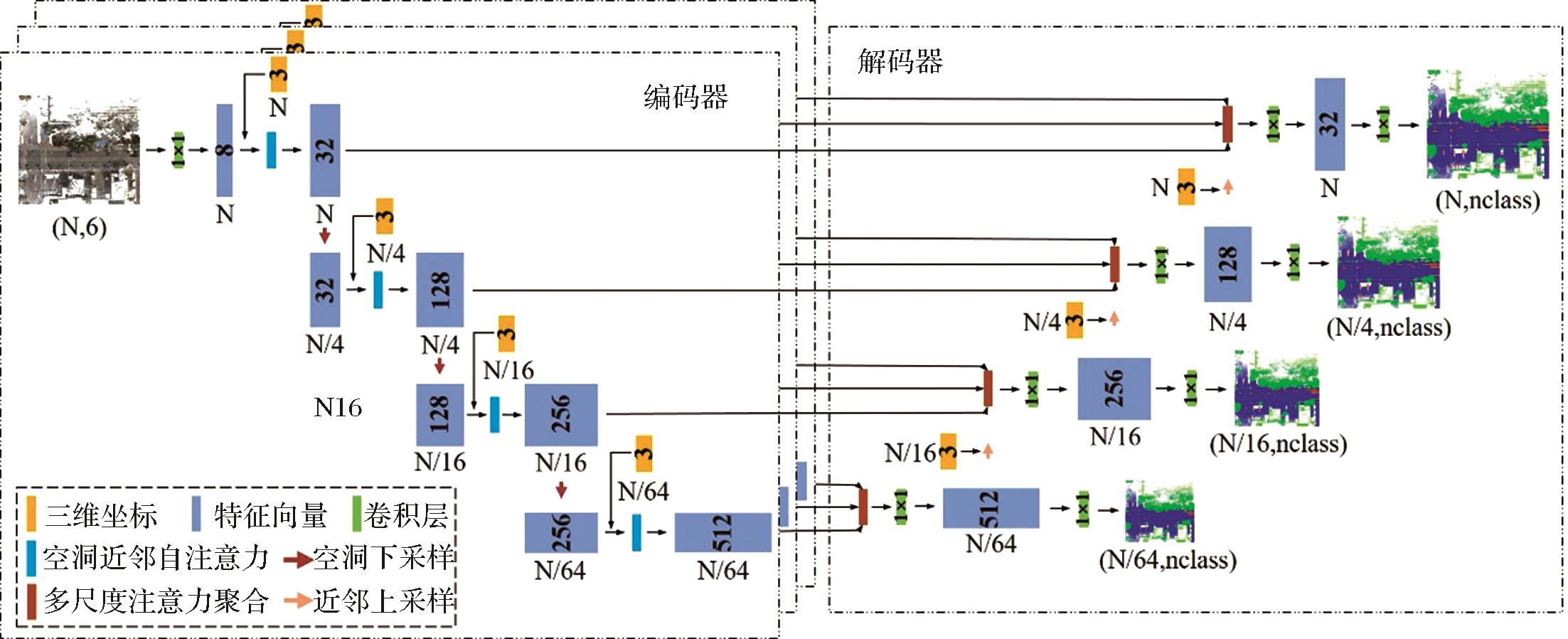
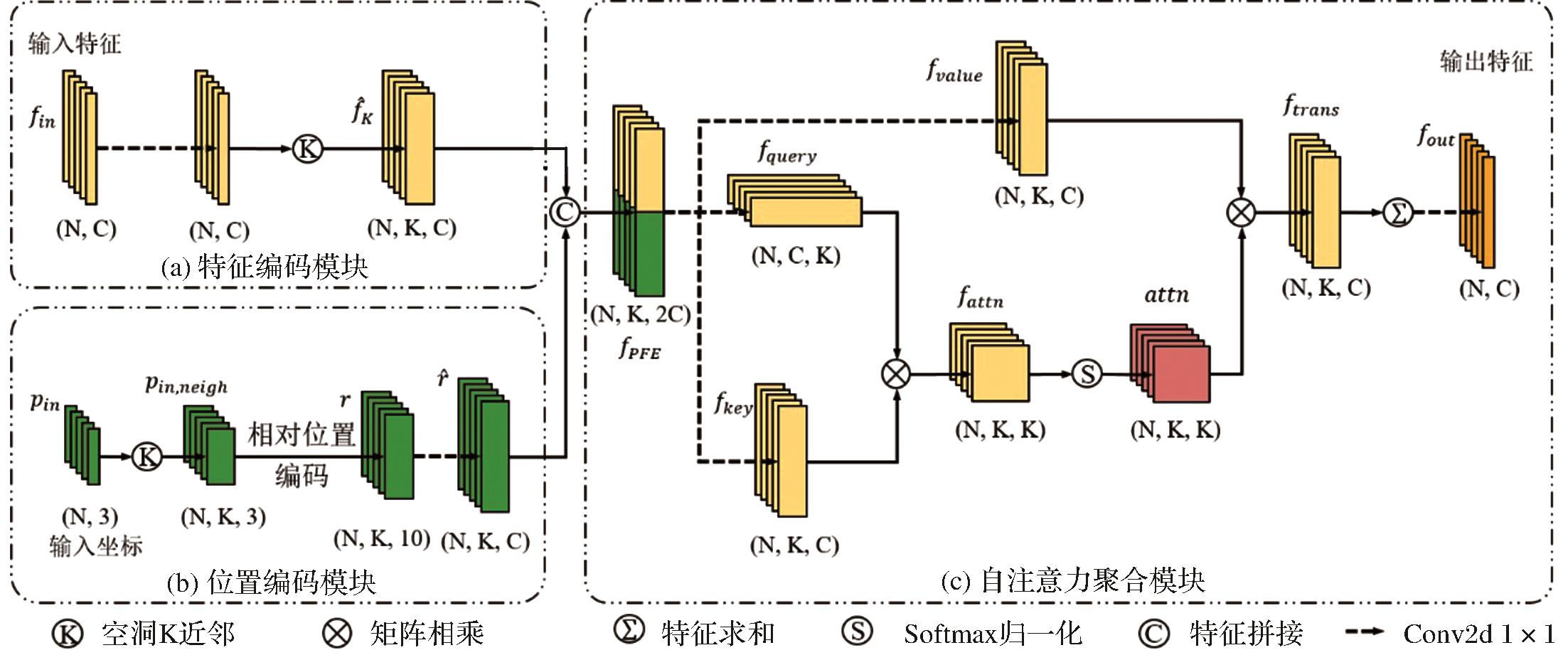
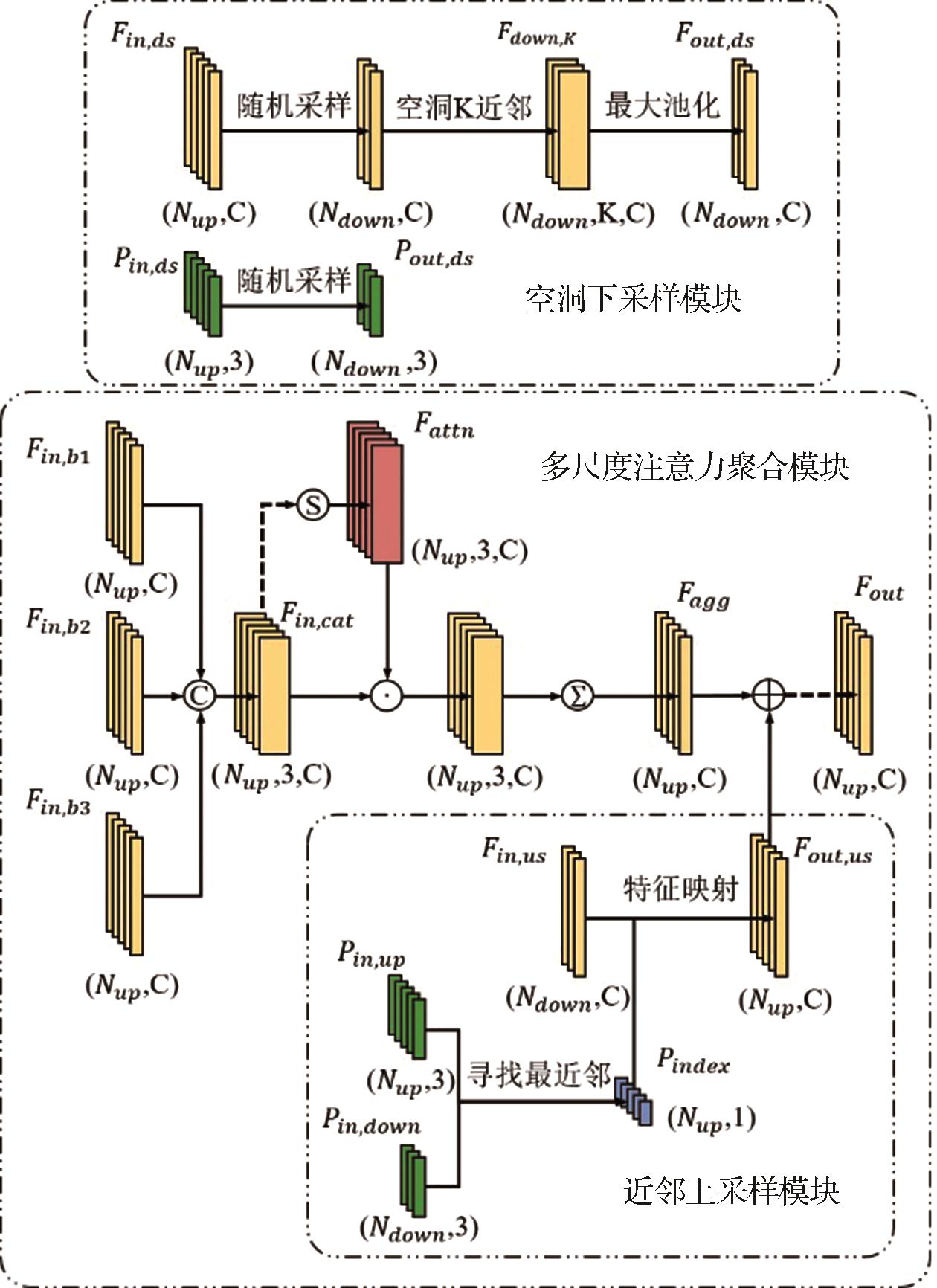
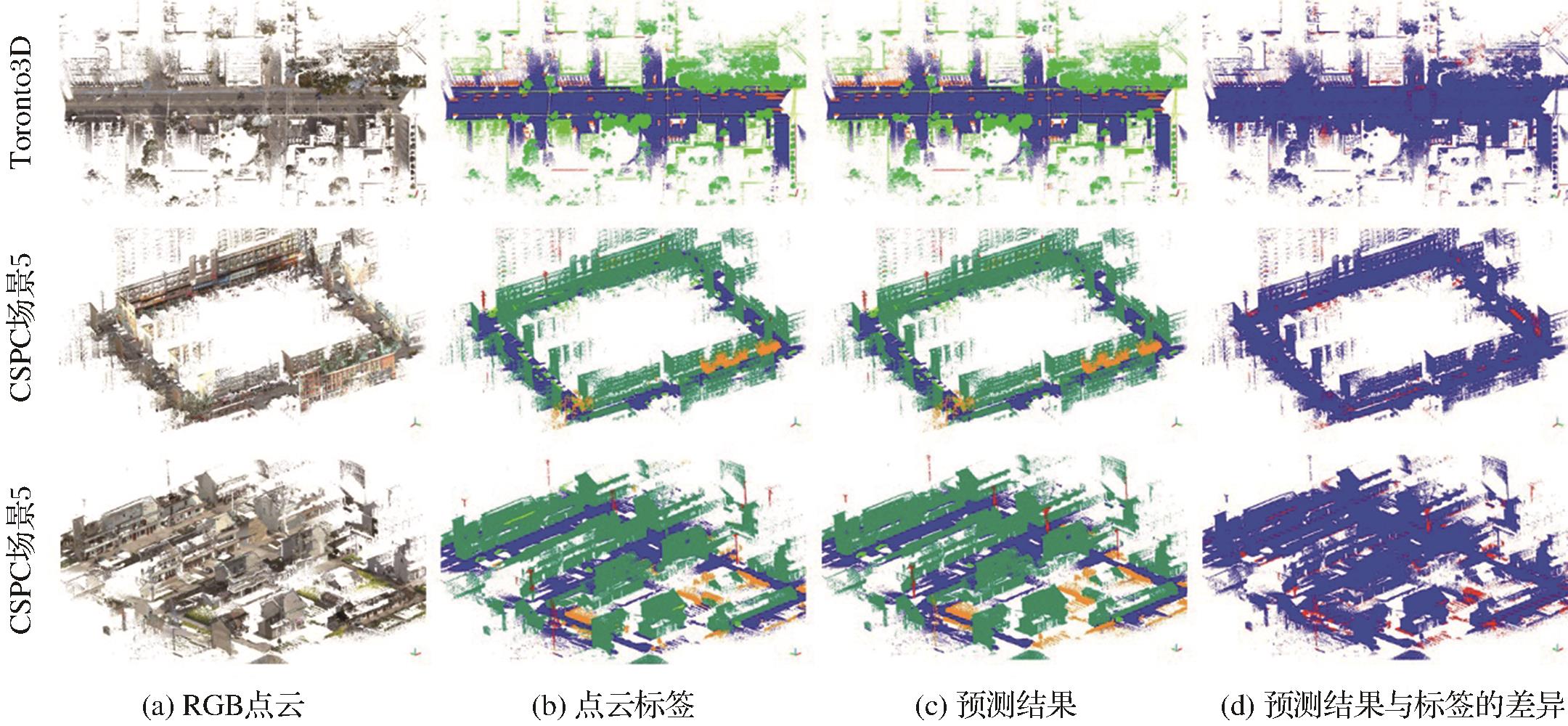
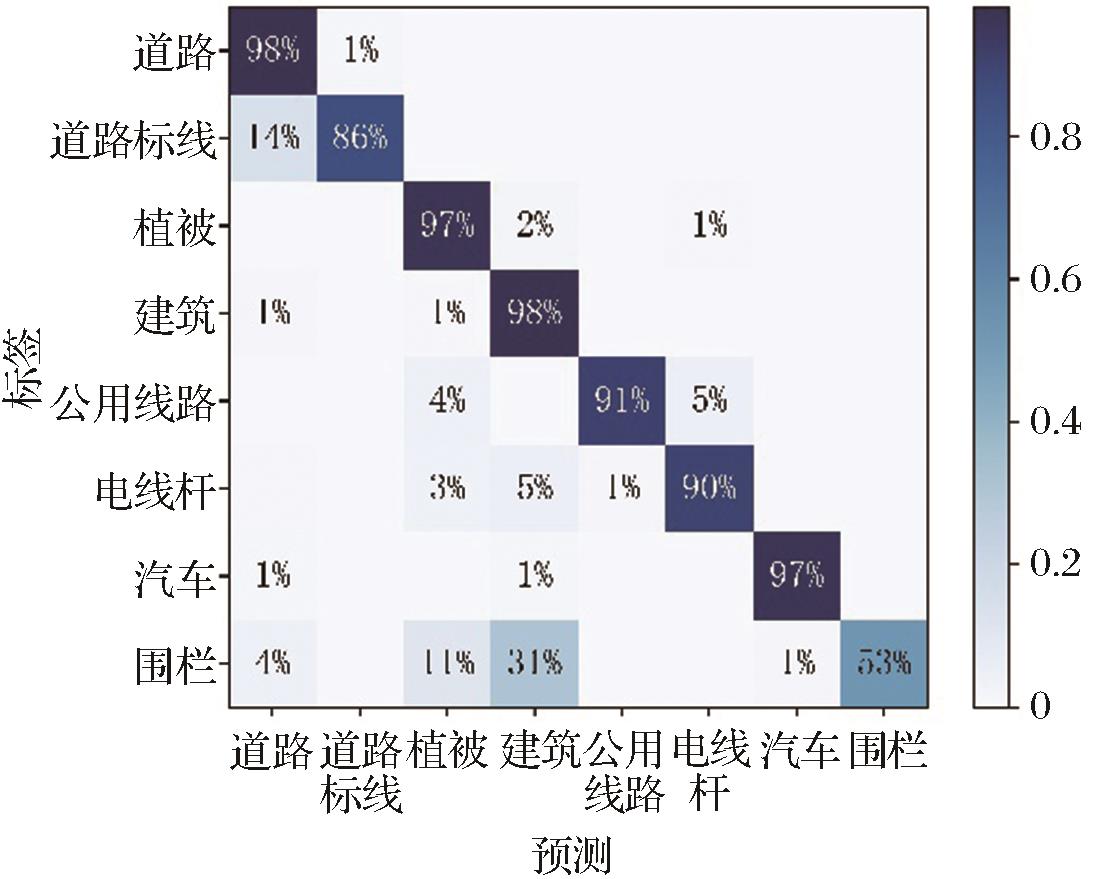
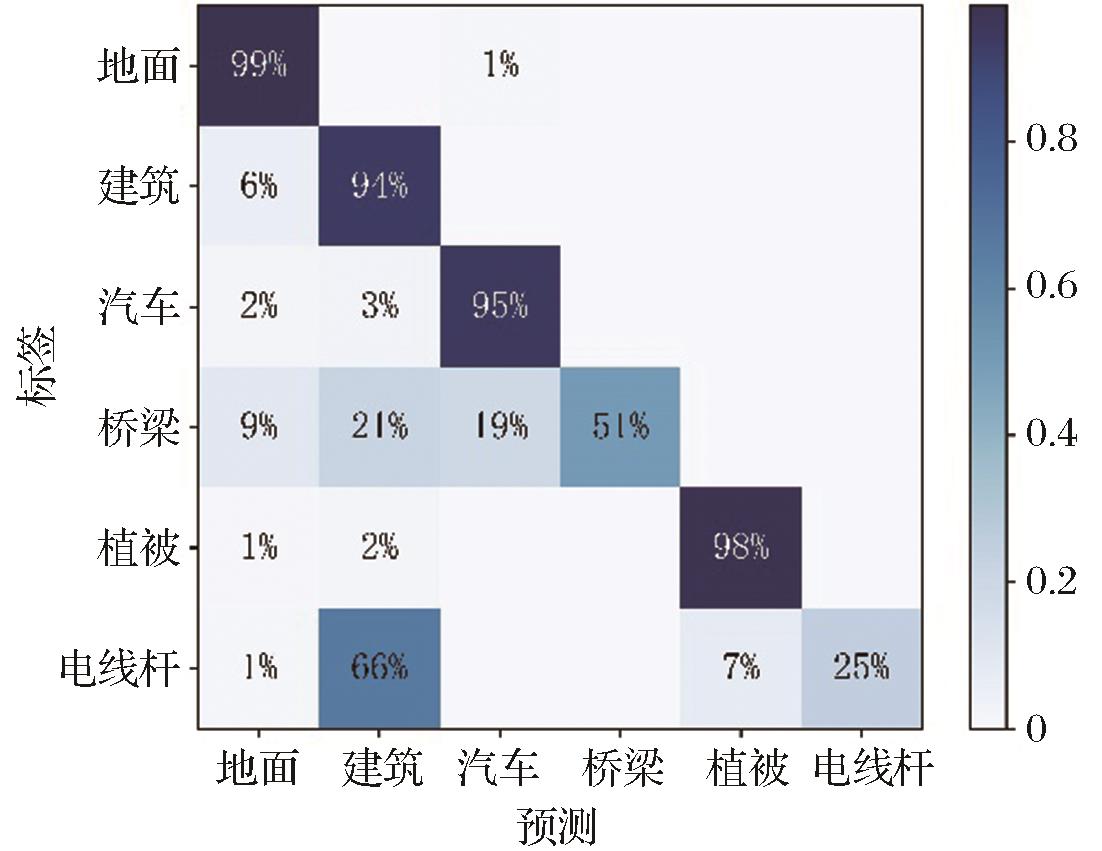
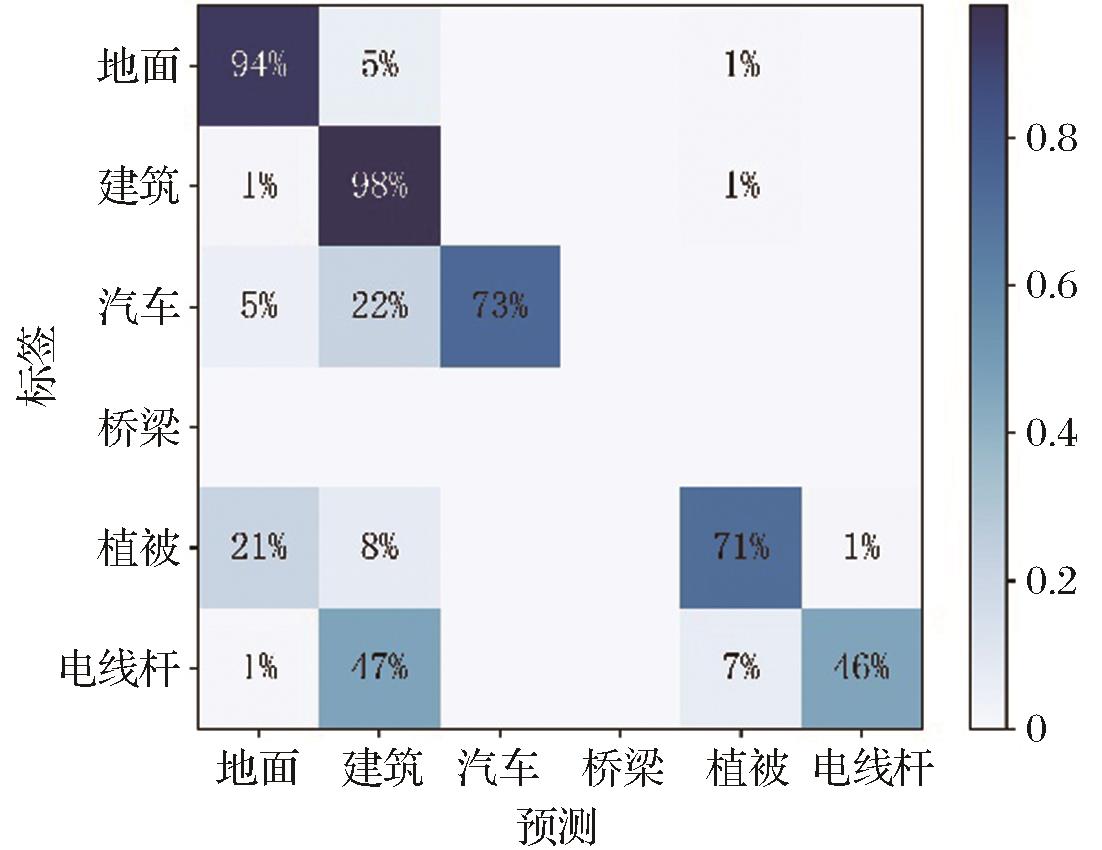
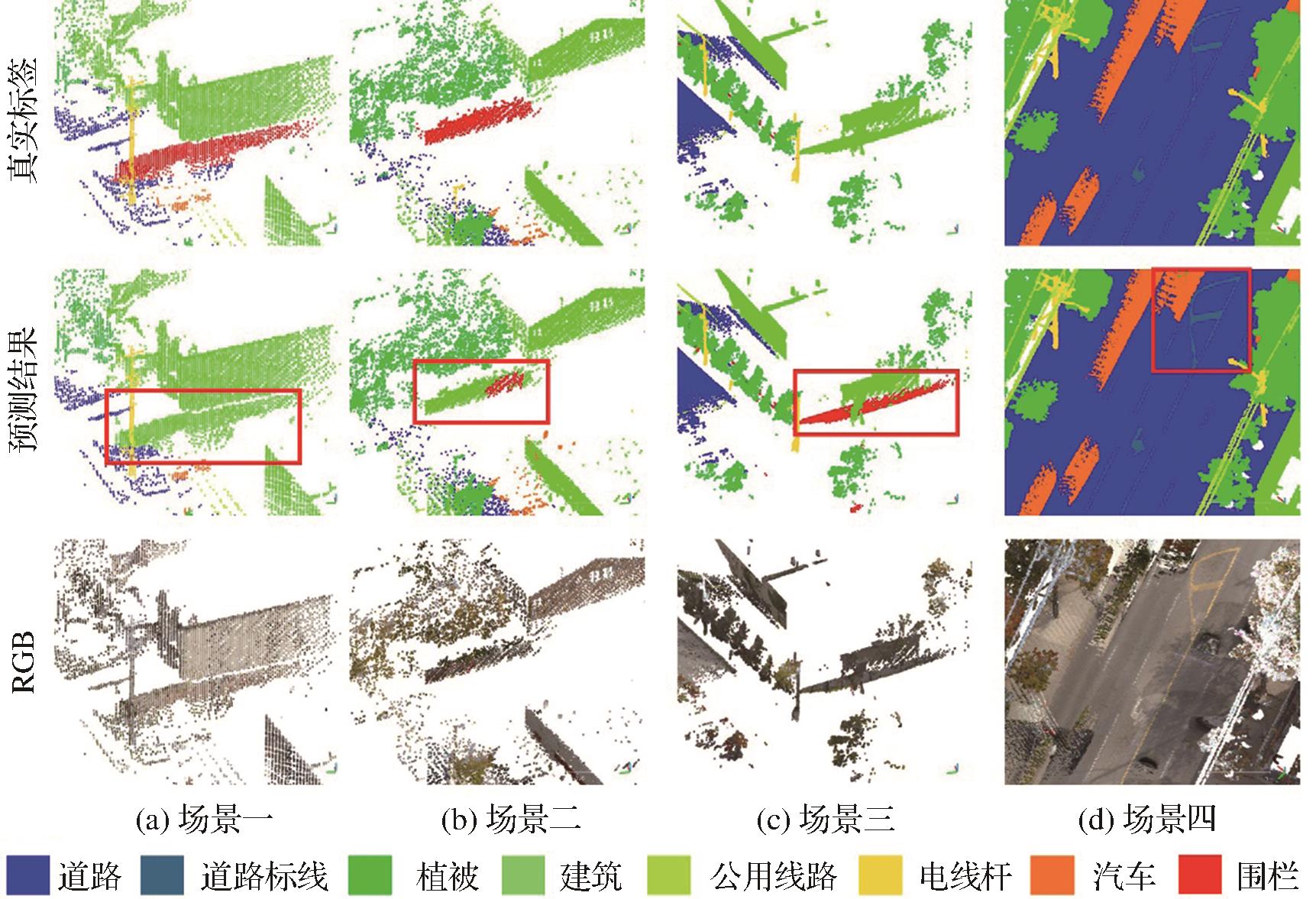
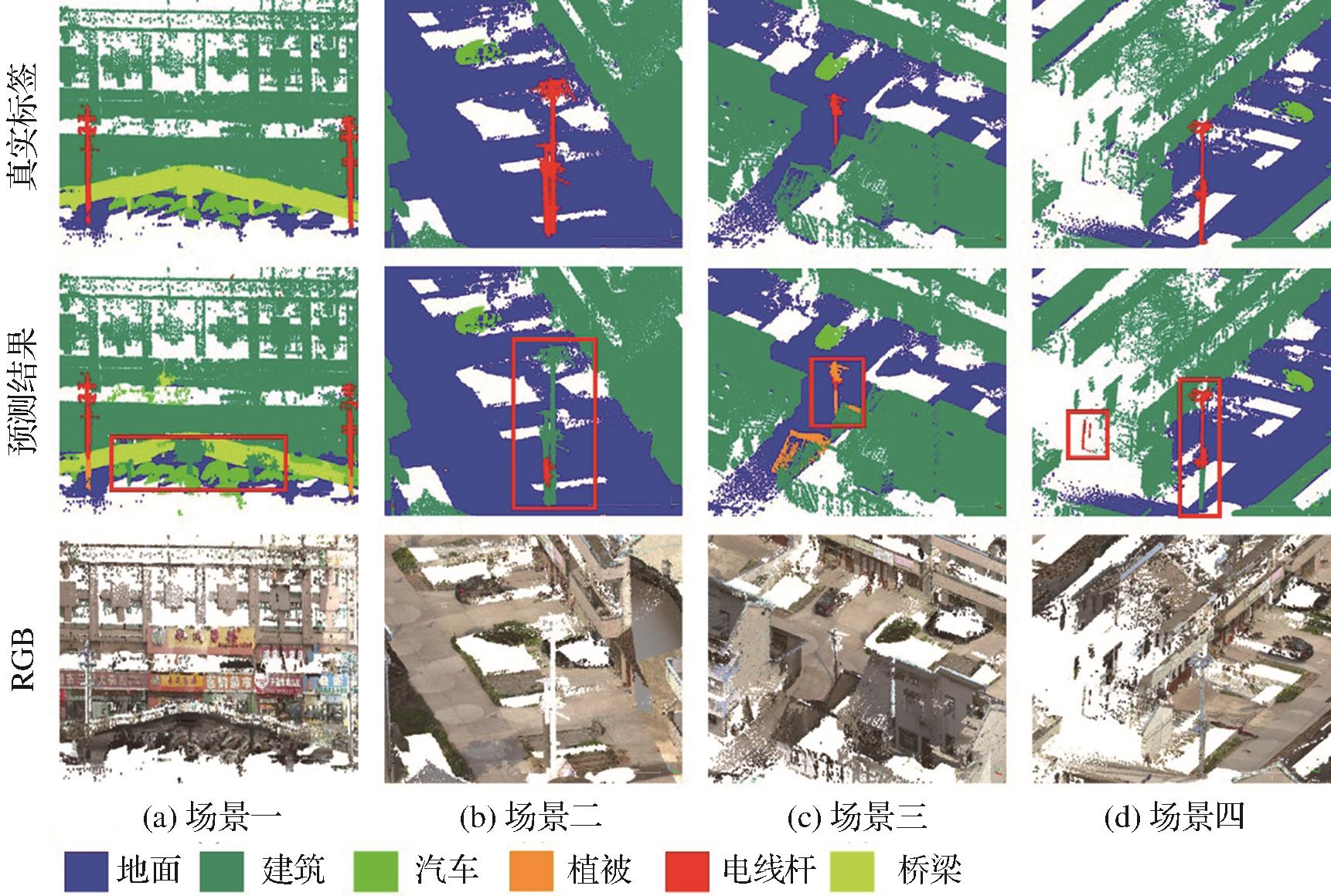
| 实验模型 | OA | mIoU | 道路 | 道路标线 | 植被 | 建筑 | 公用线路 | 电线杆 | 汽车 | 围栏 |
|---|---|---|---|---|---|---|---|---|---|---|
| PointNet++ | 91.2 | 56.6 | 91.4 | 7.6 | 89.8 | 74.0 | 68.6 | 59.5 | 54.0 | 7.5 |
| PointNet++ (MSG) | 90.6 | 53.1 | 90.7 | 0.0 | 86.7 | 75.8 | 56.2 | 60.9 | 44.5 | 10.2 |
| DGCNN | 89.0 | 49.6 | 90.6 | 0.4 | 81.3 | 64.0 | 47.1 | 56.9 | 49.3 | 7.3 |
| KPFCNN | 91.7 | 60.3 | 90.2 | 0.0 | 86.8 | 86.8 | 81.1 | 73.1 | 42.9 | 21.6 |
| MS-PCNN | 91.5 | 58.0 | 91.0 | 3.5 | 90.5 | 77.3 | 62.3 | 68.5 | 53.6 | 17.1 |
| TGNet | 91.6 | 58.3 | 91.4 | 10.6 | 91.0 | 76.9 | 68.3 | 66.3 | 54.1 | 8.2 |
| MS-TGNet | 91.7 | 61.0 | 90.9 | 18.8 | 92.2 | 80.6 | 69.4 | 71.2 | 51.1 | 13.6 |
| RandLA-Net | 96.6 | 78.0 | 96.6 | 66.7 | 96.2 | 89.3 | 85.9 | 81.0 | 78.8 | 29.5 |
| Point Transformer | 96.8 | 79.9 | 96.7 | 64.6 | 95.9 | 91.0 | 87.6 | 79.0 | 87.5 | 36.9 |
| 本文方法 | 97.2 | 82.2 | 97.1 | 65.8 | 95.7 | 90.8 | 86.2 | 80.2 | 93.6 | 48.1 |