×
模态框(Modal)标题
在这里添加一些文本
Close
Close
Submit
Cancel
Confirm
×
模态框(Modal)标题
×
ISSN 1004-0323
CN 62-1099/TP
RSS
|
Email Alert
Toggle navigation
Home
About Journal
Editorial Board
Instruction
Journal Online
Current Issue
Online First
Archive
Most Read
Most Download
Most Cited
Subscription
Advertisement
Publication Ethics
Contact Us
中文
Figure/Table detail
Semantic Segmentation Method of Street Point Cloud based on Deep-Supervised Multi-Scale Self-Attention
Guangchao LIU, Chenxiao ZHANG, Lei HU
Remote Sensing Technology and Application
, 2025, 40(
6
): 1626-1636. DOI:
10.11873/j.issn.1004-0323.2025.6.1626
方法
预测总时间/s
参数量/10
7
每秒预测点数/10
3
RandLA-Net
179
1.24
55.8
Point Transformer
180
1.36
55.5
本文方法
321
2.67
31.1
Table 5
Test efficiency of each method on Toronto3D dataset
Other figure/table from this article
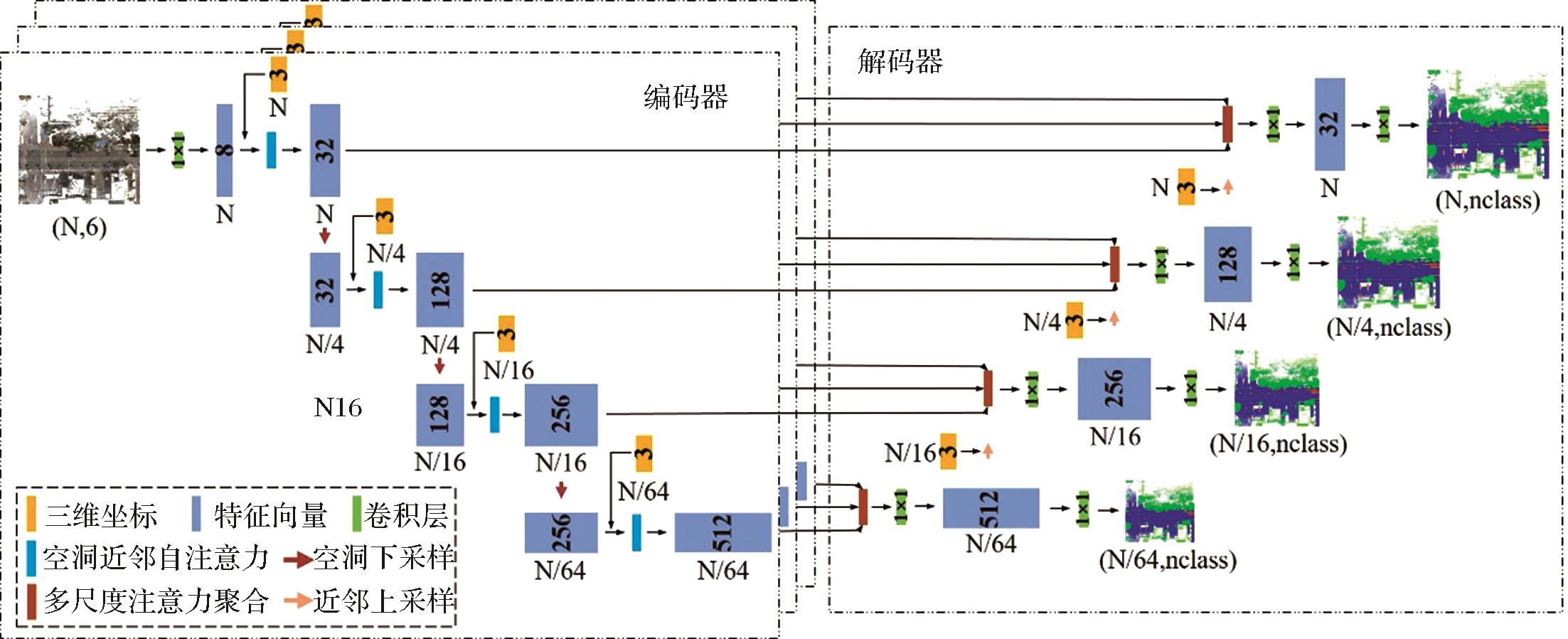
Fig.1
Network structure of 3D point cloud semantic segmentation based on deep-supervised multi-scale self-attention
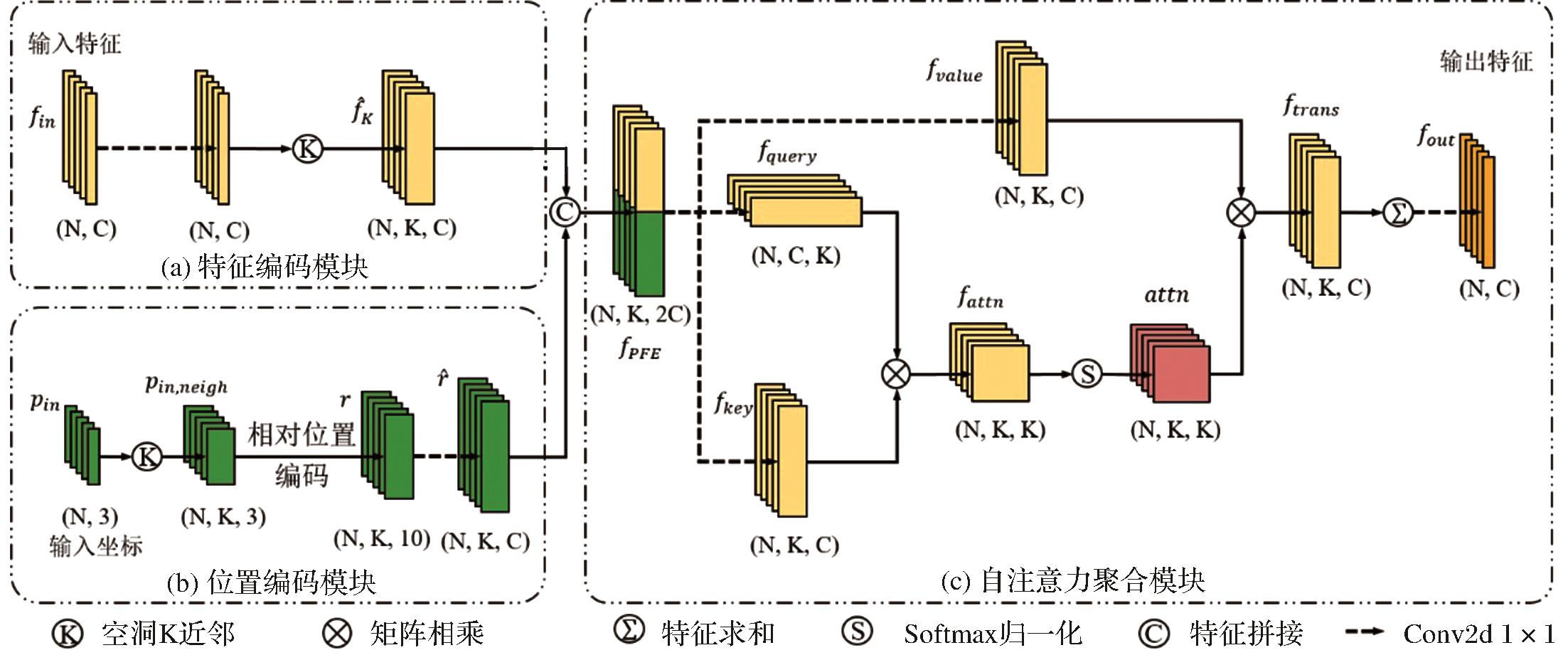
Fig.2
The structure of the dilated nearest neighbor self-attention module
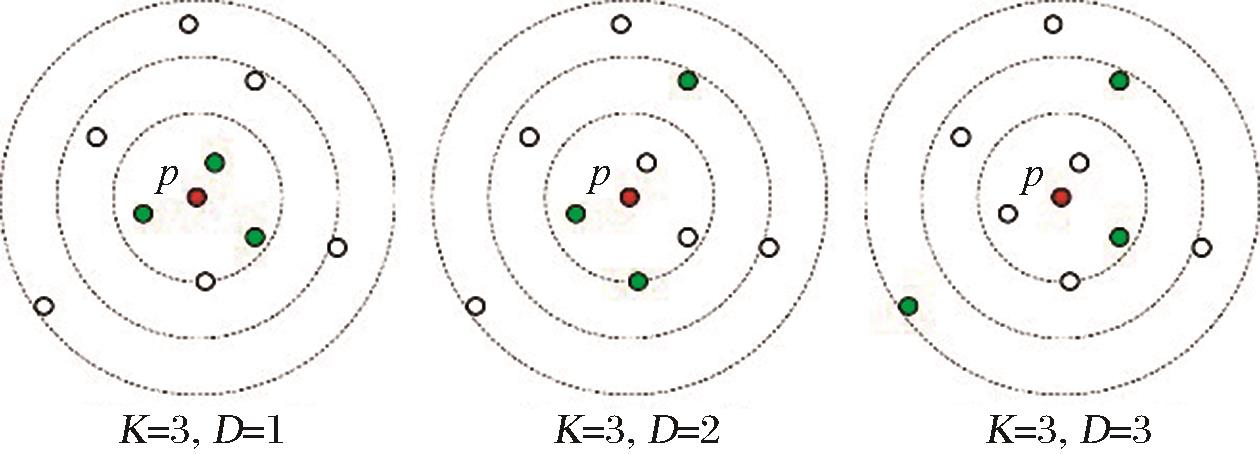
Fig.3
The idea of dilated k-nearest neighbors
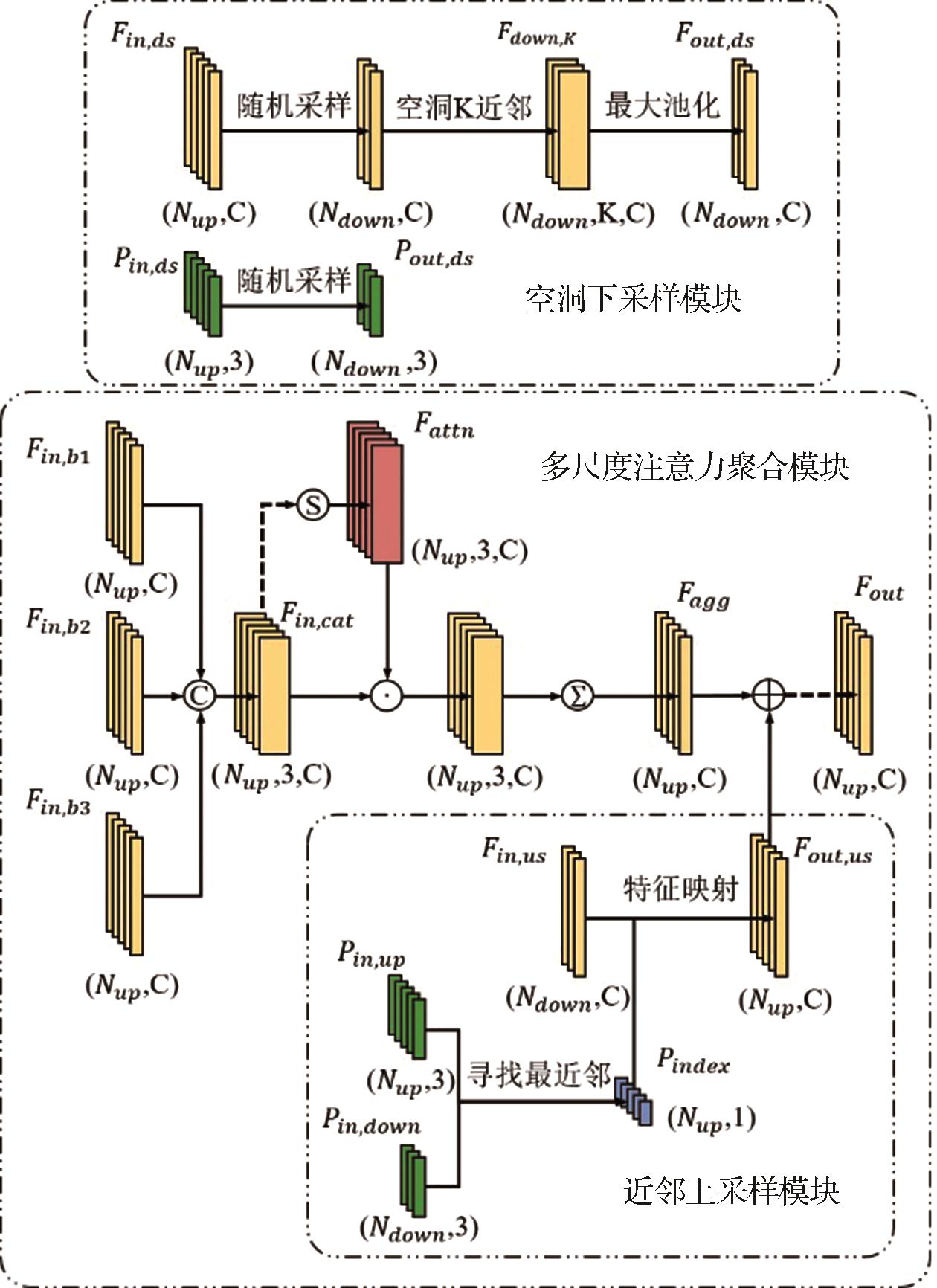
Fig.4
Structure of dilated down-sampling module, nearest neighbor up-sampling module and multi-scale attention aggregation module
Table 1
Semantic segmentation results of different models on Toronto 3D dataset
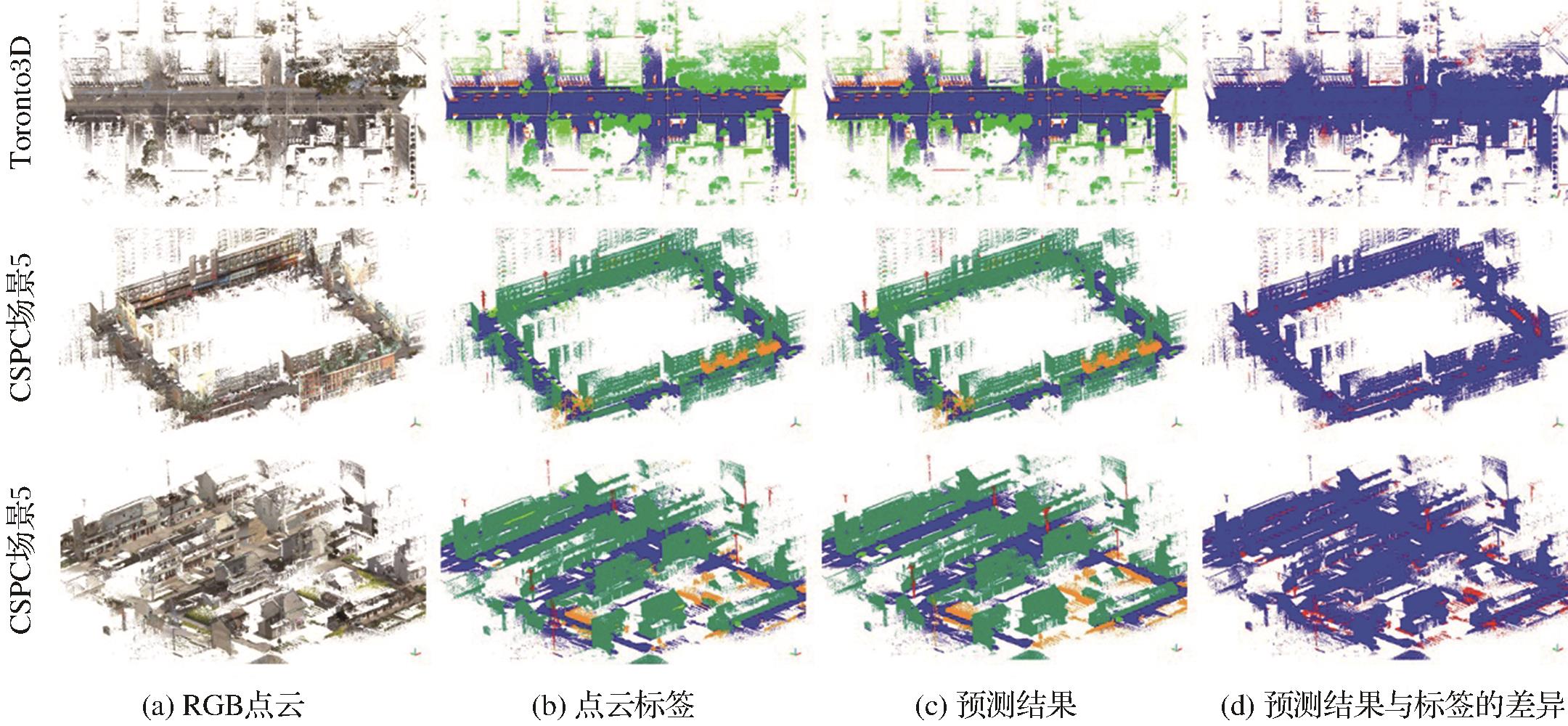
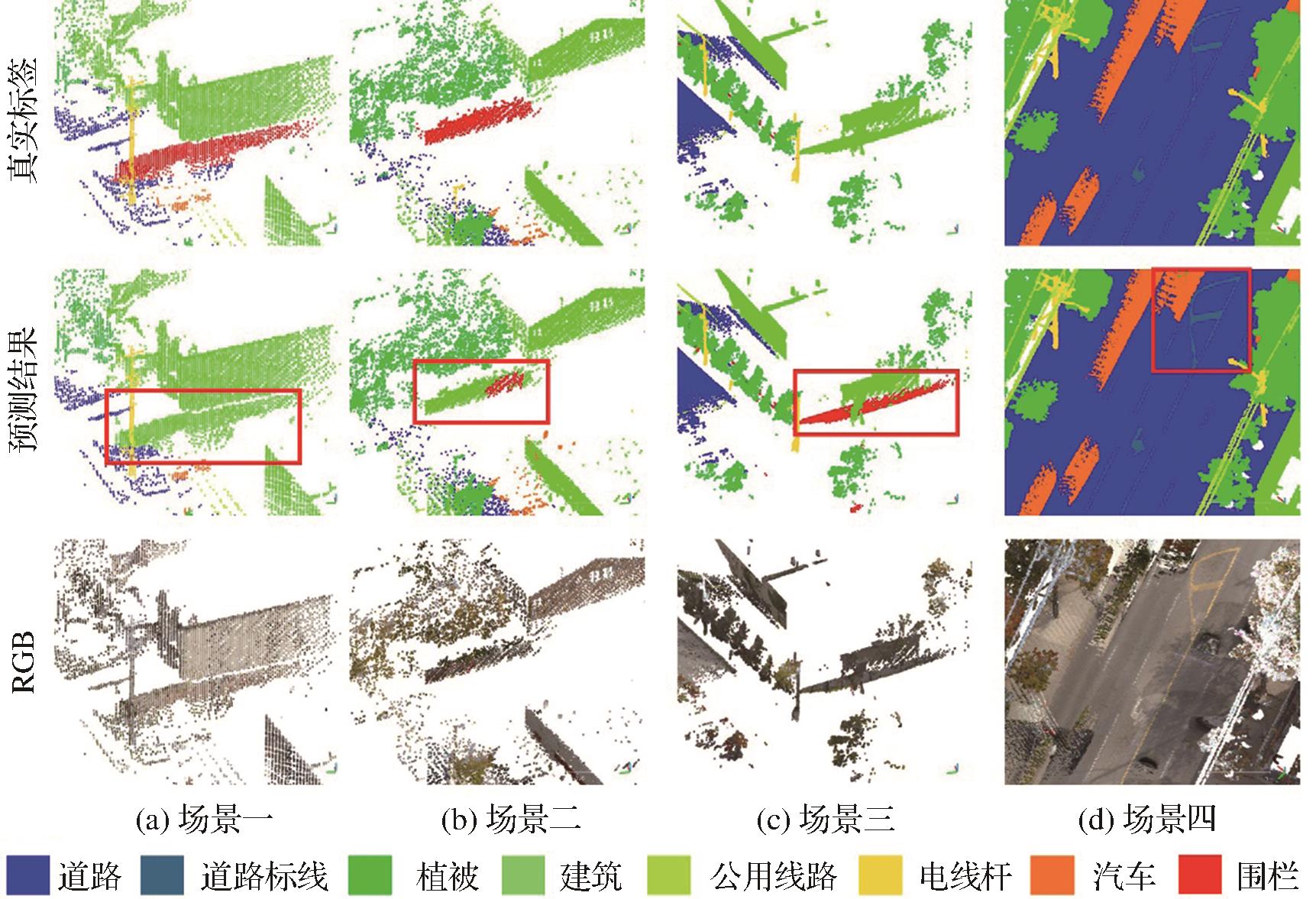
Fig.5
Visualization results on Toronto 3D dataset and CSPC dataset
Table 2
Semantic segmentation results of different models on CSPC dataset Scene2
Table 3
Semantic segmentation results of different models on CSPC dataset Scene5
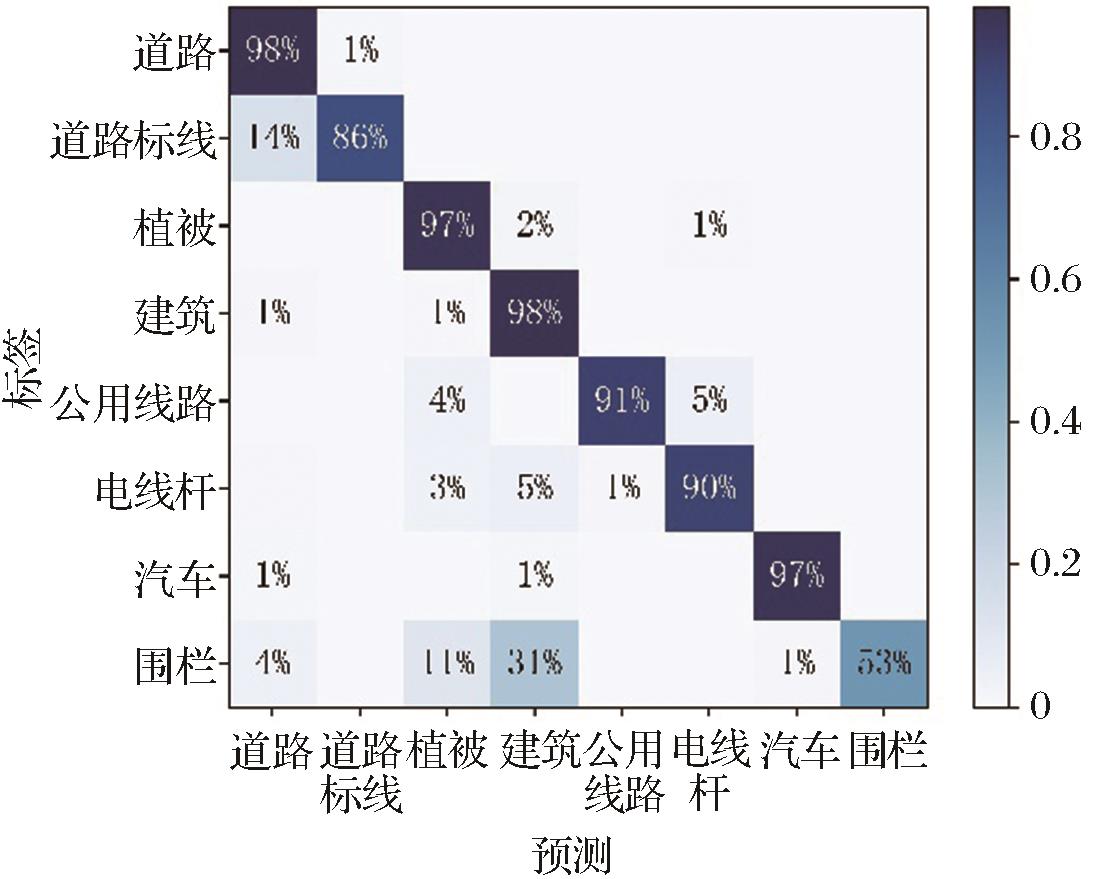
Fig.6
Confusion matrix of Toronto3D dataset
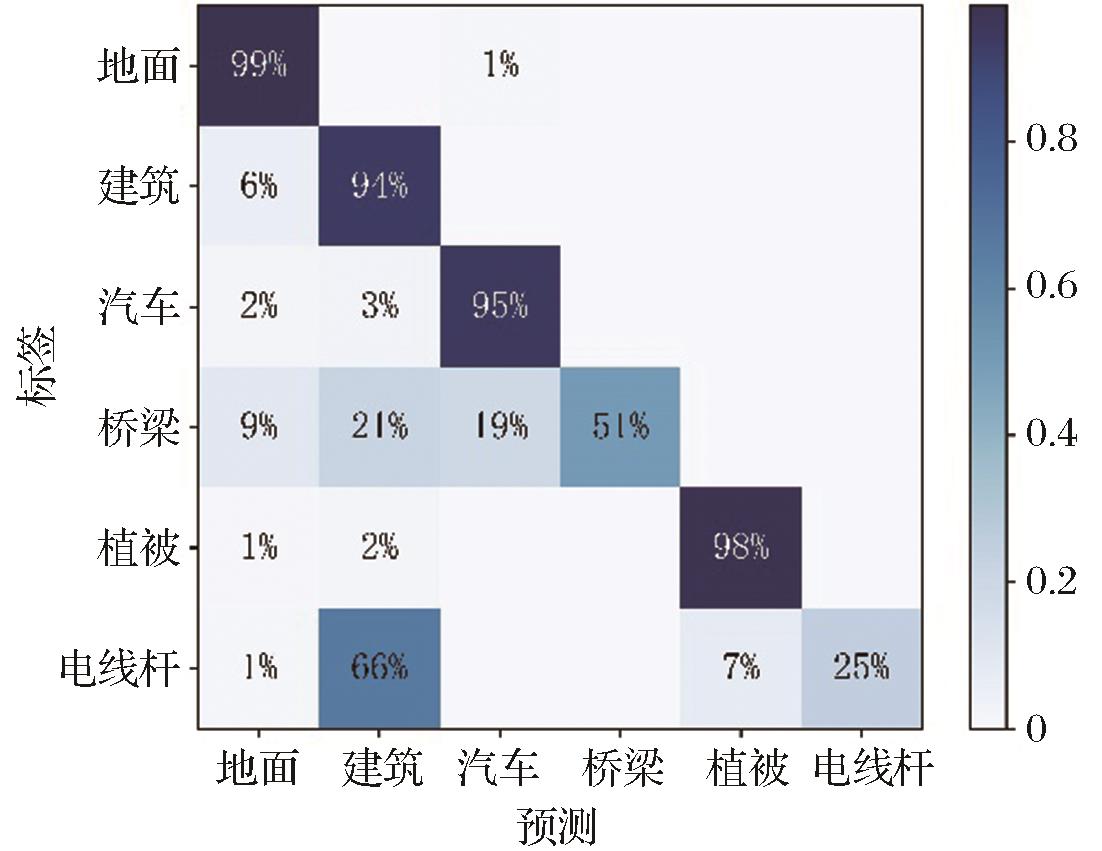
Fig.7
Confusion matrix of CSPC dataset Scene2
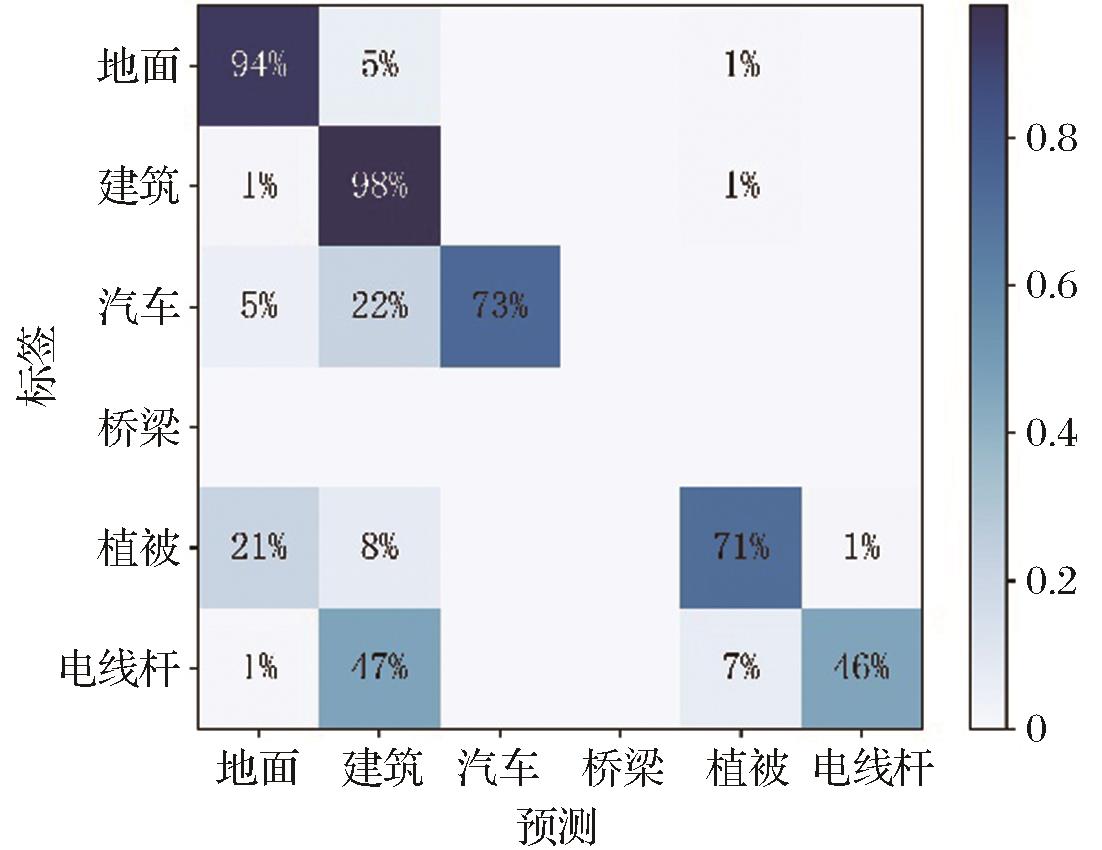
Fig.8
Confusion matrix of CSPC dataset Scene5
Fig.9
Visualization results of some mispredictions on Toronto3D dataset
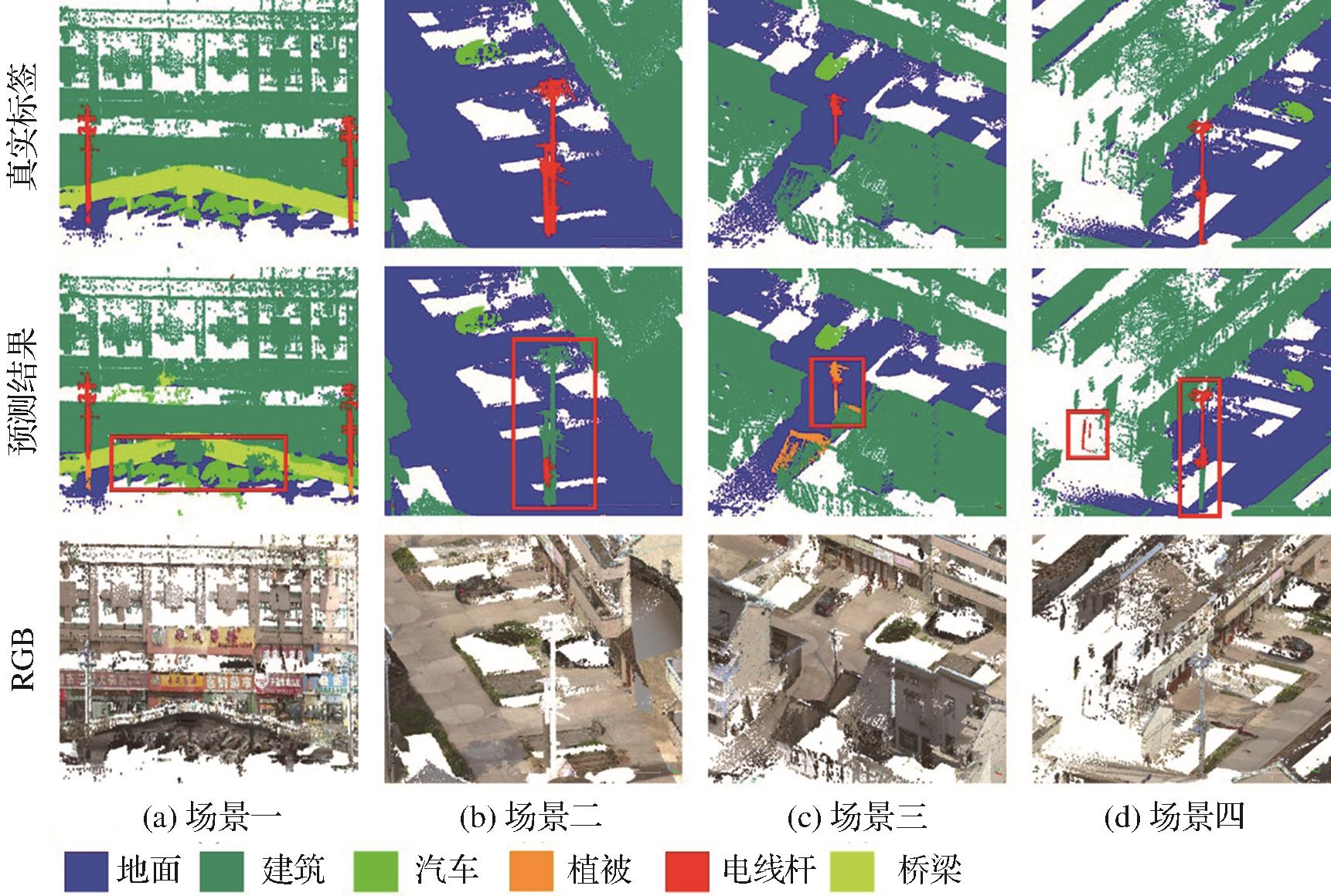
Fig.10
Visualization results of some mispredictions on CSPC dataset
Table 4
Results of ablation study on Toronto3D dataset