




1 引 言
国际超级双极光雷达网(Super Dual Auroral Radar Network, SuperDARN)是由分布于地球两极及中高纬地区30多部高频雷达组成的观测网络,主要用于极区和中高纬度电离层不规则体探测,以获取电离层不规则等离子体的信息,绘制全球电离层对流模式图[1]。在国家高技术研究发展计划(863计划)的支持下,中国科学院国家空间科学中心自主研制完成了一部灵敏型SuperDARN雷达(Agile Dual Auroral Radar Network, AgileDARN)[2],实现了地基相干散射雷达技术的国产化,填补了中国中纬度区域上空的探测数据空白,同时为我国子午工程二期的建设及参与SuperDARN雷达国际合作奠定了基础。
AgileDARN雷达位于黑龙江省佳木斯市郊,地理坐标为46.76°N,130.48°E。该雷达是一部工作在8~20 MHz的双线性阵列相控阵雷达,通道间的一致性是雷达性能的重要保障。然而,由于T/R组件(Transmit/Receive modules)元器件性能差异、电路设计和加工制造差异、设备工作频率和周围温度等环境的变化等各种因素,使得雷达系统的各通道间信号存在一定程度的幅相不一致[3,4]。Sun等[5]分析了幅相不一致对雷达测角精度的影响,提出在ADC芯片的位数足够高、动态范围大于信号的动态范围且能满足实时处理的情况下,幅相不一致是主要误差来源。Yu等[6]分析了T/R组件幅相不一致性对波束形成的影响,会导致波束副瓣电平提高,严重影响相控阵天线的性能。也即相控阵雷达的通道间不一致性会引入雷达阵列方向图误差,包括波束指向误差、阵列副瓣电平误差等,并最终影响雷达的指向精度,抗干扰能力和作用距离[7]。
对于幅相不一致的校正,国内外研究的典型方法有无线馈入参考信号法[8]、注入信号法[9]、通道均衡法[10]和盲信号校正法[11],根据实际应用的不同需求选取合适的算法。在这4种典型的方法的基础上,国内外学者们又提出了一些改进型的校正方法。文献[12]是澳大利亚的SuperDARN雷达Tiger-3采用的一种校正方法:用两个同频正交的正弦信号来校正通道相位不一致性。该方法能排除参考通道本身的影响,对每个通道的相移做补偿,工作在14 Mhz时校正后的误差小于0.153°,但该方法的计算复杂,消耗大量FPGA资源且耗时较长。文献[13]中采用步进试探插值计算的方法计算校正值,来实现多通道雷达接收机幅相不一致的实时校正,校正后通道间信号相位误差小于0.17°,幅度误差小于0.004 dB,在工作频率为170 MHz时,7.42 μs即可完成校正。该方法校正精度高,实时性好,但需要附加一个校正电路。以上文献中的校正方法,都达到了较好的幅相不一致性校正效果,但这些方法需要消耗大量的FPGA乘法器和除法器等资源或者需要额外添加辅助设备。
本文基于AgileDARN雷达提出了一种基于时域比较的实时定标方法,并通过FPGA和C++软硬件相结合的方法来实现。该方法在保证校正精度的同时兼顾了校正的实时性,同时避免了FPGA进行复杂的乘法和除法运算,节省了大量的FPGA资源和降低了程序的复杂度。
2 AgileDARN系统简介
AgileDARN雷达是一部工作在8~20 MHz的地基相干高频雷达,由20单元的天线,20套T/R组件,数字系统和主控计算机4部分组成,其系统框图如图1所示。
图1
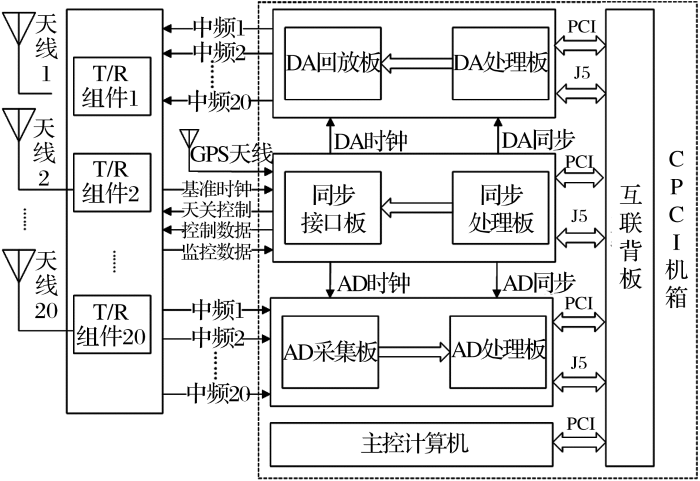
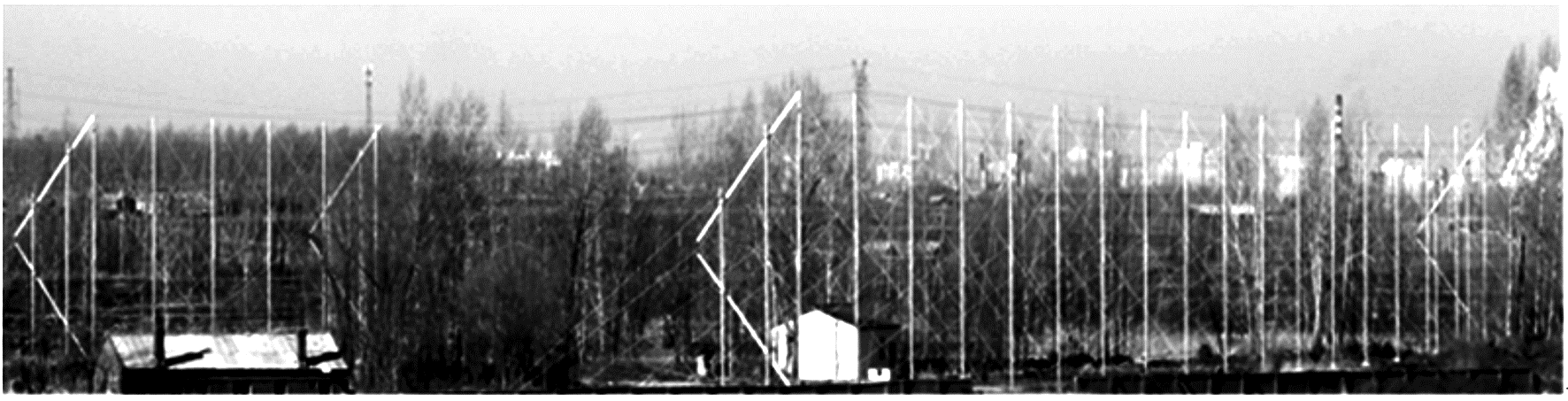
AgileDARN雷达采用的是数字多波束天线系统[14],收发共用同一组天线,但信号处理过程有所不同。天线采用的是双折合偶极子天线[15,16],阵列方式为双线性阵列,由16单元的收发主阵和4单元的干涉子阵组成,天线实物图和天线示意图分别如图2(a)和2(b)所示。T/R组件是雷达的核心部件,由接收支路、发射支路和定标支路组成。数字系统包括发射信号产生模块(下文简称DA板),回波信号采集模块(下文简称AD板)和同步控制模块(下文简称同步板)。数字系统主要用于信号的产生、回波采集、数字下变频、FIR滤波、数字波束合成等,通过RS422串口与T/R组件完成信息交互,并根据工作时序对组合开关进行控制以实现对T/R组件工作模式进行控制。主控计算机上的上位机软件主要用于整个雷达系统的控制,下发控制参数,存储和处理雷达数据。主控计算机和3块数字板卡组装在1个标准的CPCI机箱内部,通过PCI总线完成与数字系统信息交互和数据采集。
3 多通道幅相一致性的内定标方法
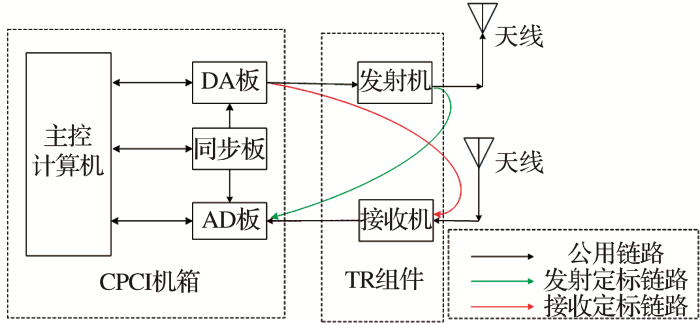
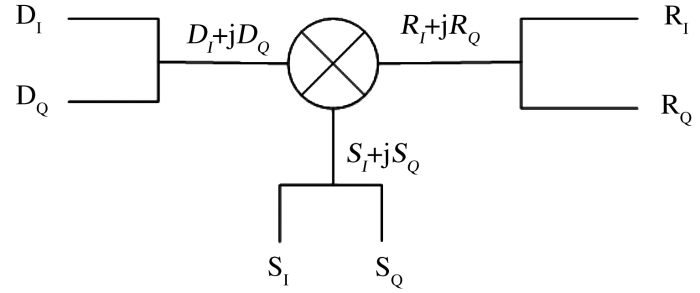
对于AgileDARN雷达,单通道发射功率高达600 W。为了避免发射泄露对接收机的影响,采用发射定标与接收定标分时进行,内定标链路示意图如图3所示。在发射探测信号之前,会分时发送两个定标信号,分别用于计算接收链路和发射链路的幅相不一致性。每个观测周期的起始时刻,先进行接收定标,此时收发组件的开关切换至接收定标支路,DA板播出的信号不经过发射机,直接接入接收机的输入端口,处理完的数据由AD板采集并处理;接收定标结束后,进行发射定标,开关切换至发射定标支路,DA板播出的信号经过发射机放大后直接被AD板采集,不经过接收机。系统内定标链路均不经过天线,主要标定数字系统和TR组件各通道的幅相不一致性。
图3
从图2的定标链路示意框图可以看出,T/R组件和数字系统都可能产生幅相误差。因此,可以不具体讨论误差是由哪个模块产生的,而是直接对波束合成之前所有模块产生的累积误差进行校正。DA板产生同频同相同幅度的定标信号后,分别经过接收和发射链路后,经AD采样,FIR滤波、数字下变频至零中频的基带信号,将m通道和n通道的信号表示如下:
其中:Am、An和 φm、φn分别为两个通道信号的幅度与相位。假设m通道为基准通道,m通道与n通道的幅相差异分别为
其中:
4 内定标的实现及结果
4.1 内定标的实现
AgileDARN雷达内定标的实现采用了软硬件相结合的方法,上位机的软件部分基于Centos 6.5系统,编译环境是QT,编程语言是C++,主要负责数据的存储和校正因子的计算。硬件部分基于Windows操作系统,编译环境是ISE14.7,编程语言Verilog,数字系统的3块板卡均采用的FPGA芯片是Xilinx公司开发的Virtex6系列中的XC6VLX240器件,该芯片有丰富的逻辑资源,处理能力强大,用于实现包括定标在内的整个雷达系统的数字信号处理,软硬件相结合的校正原理示意图如图4所示。主控计算机在获取到定标数据后,计算各个通道之间的幅度和相位不一致性,根据不一致性得到校正因子,下发给数字系统完成校正。
图4
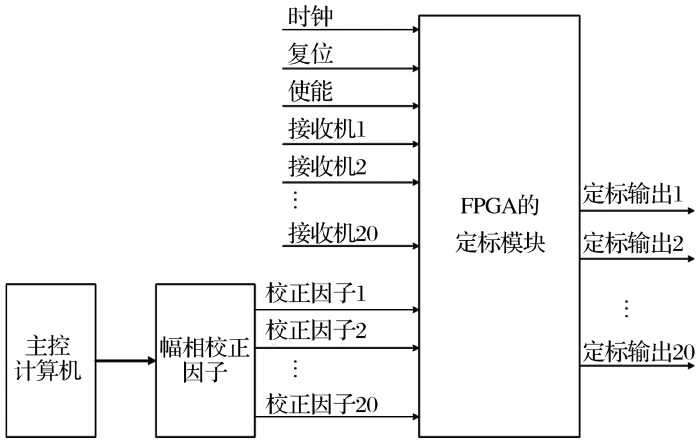
图4
软硬件相结合的定标原理示意图
Fig.4
Schematic diagram of the principle of combining software and hardware
数字系统中定标模块的内部结构如下图5所示。校正模块主要进行的是复乘运算,将基带数据
图5
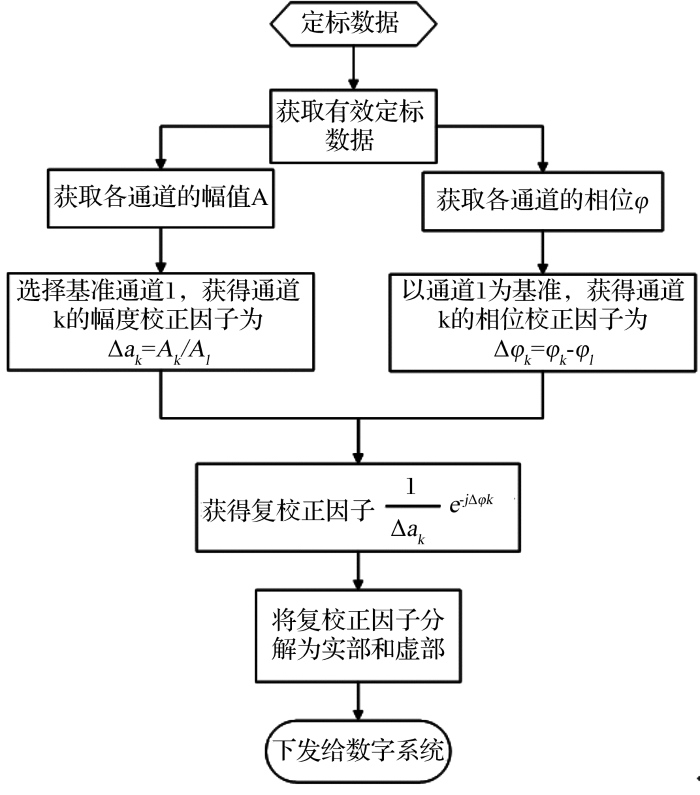
软件实现部分由上位机完成,用于计算幅相校正因子。上位机获取到雷达20个通道的定标数据后,首先获取有效定标数据,选定通道l作为参考通道,得到各通道的幅度校正量
图6
4.2 内定标方法验证
图7
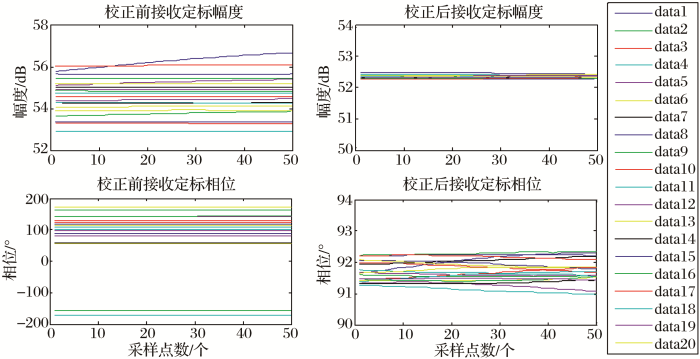
图7
接收链路校正前后幅度和相位差异
Fig.7
Amplitude and phase imbalances among channels in receiver chain before and after calibration
图8
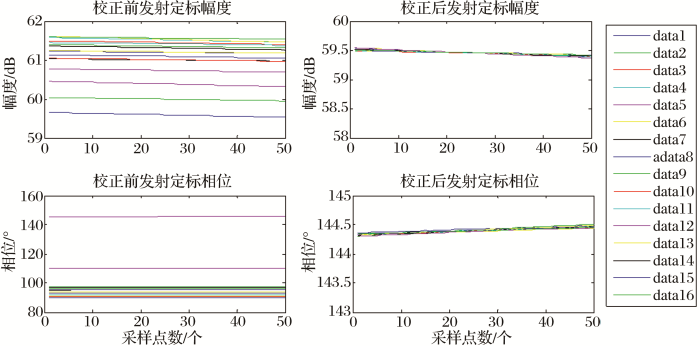
图8
发射链路校正前后幅度和相位差异
Fig.8
Amplitude and phase imbalances among channels in transmitter chain before and after calibration
相控阵雷达各通道的幅相不一致将导致副瓣电平抬高,校正前后天线方向图的对比如图9所示。校正后副瓣电平降低,主瓣宽度有所减小,同样验证了定标方法的可行性。
图9
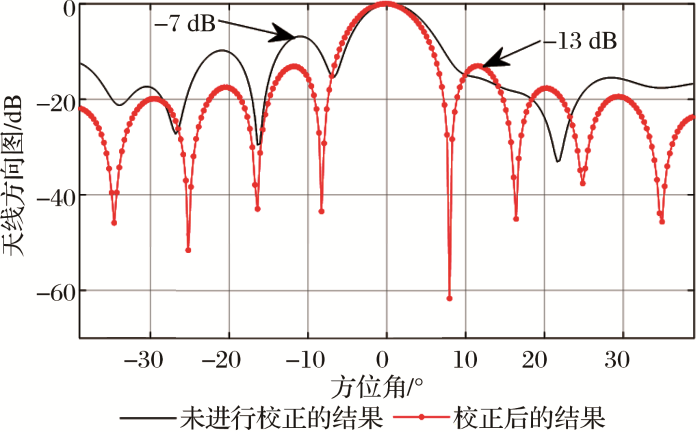
图9
校正前后天线方向图对比
Fig.9
Comparison of antenna patterns before and after calibration
5 结 语
本文提出了一种AgileDARN雷达多通道幅相不一致性校正的软硬件相结合的定标方法。介绍了雷达系统,上位机如何计算得到幅相校正因子以及数字系统如何完成校正,并给出了该方法在AgileDARN雷达多通道不一致的校正中能达到的精度。实测数据结果表明,通道间的相位不一致小于1°,幅度不一致小于0.2dB。该方法巧妙地利用了上位机的计算能力,避免了FPGA进行大量的乘法和除法运算,降低了程序的复杂度,即可以选择资源稍少的芯片,从而降低了数字系统的成本。为多通道雷达提供了一种可行的通道不一致的校正方法。
参考文献
A Decade of the Super Dual Auroral Radar Network (SuperDARN): Scientific Achievements, New Techniques and Future Directions
[J].
Project Report for AgileDARN Radar
[R].
AgileDARN雷达的项目报告
[R].
A Method on Amplitude and Phase Calibration for Phased Array Antennas Transmit System
[J].
相控阵发射系统中幅相校准方法研究
[J].
A Correction System of DBF Antenna’s Receiver based on LMS and Its Realization
[J].
多波束天线通道幅相一致性校正及实现
[J].
Calibration of Amplitude and Phase Imbalances in Sum and Differences and Angle Error Digital Processing
[J].
和差幅相不平衡校正与角误差数字化处理
[J].
Techniques for Controlling the Amplitude-phase Consistency of Multi-channel T /R Modules with Large Quantity
[J].
批量多通道T/R组件幅相一致性的控制技术
[J].
Yu Tao, Research on Amplitude-phase Consistency in T/R Modules
[D].
An Overview of Near-field Antenna Measurements
[J].
An Automated Test System of Multichannel DBF Receivers
[J].
一种多路DBF接收机的自动测试系统研究
[J].
Research on Calibration Method for Receiving Channel in DBF
[J].
数字波束形成中的接收通道校正技术研究
[J].
Tu Shuiping, Study of the Key Techniques of Amplitude-phase Consistency Test for DBF System
[D].
Accurate Phase Calibration for Digital Beam-Forming in Multi-Transceiver HF Radar System
[J].
Correction of Amplitude-Phase Imbalance based on FPGA for Multi-Channel Radar Receivers
[J].
基于FPGA的多通道雷达接收机幅相不一致校正
[J].
Research on Test and Calibration Technology of Digital Multi-Beam Antenna
[J].
数字多波束天线的校准测试方法
[J].
Single Piece Twin Folded Dipole Antenna
[P].Application Number
Evolution of the SuperDARN Antenna: Twin Terminated Folded Dipole Antenna for HF Systems
[C]//24
-

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}