




1 引 言
土壤水分在众多地球科学研究领域有着重要的应用价值,例如长时间序列的陆表水循环分析、气候变化响应研究、全球碳循环、短期天气预报和陆表粉尘排放等[1]。被动微波遥感可以以较高的时间分辨率获取大范围的地表土壤水分信息,特别是随着Soil Moisture and Ocean Salinity (SMOS)[2]和Soil Moisture Active Passive(SMAP)[3]等计划的启动,进一步丰富了全球尺度的土壤水分长期遥感观测。然而,在大多数可获取土壤水分数据的卫星任务中,土壤水分并不是唯一的观测目标,搭载的传感器存在多极化、多频率和多角度等不同的观测方式,导致对土壤水分的敏感程度不同,受到的干扰因素也不尽相同。进而,由这些微波遥感观测反演得到的不同土壤水分产品也存在各自的优缺点,且尚未有任何一种产品的精度在全球尺度上令人满意[4]。因此,融合多源土壤水分产品的优势,控制并降低数据的不确定性,是目前提高土壤水分遥感数据质量的重要途径[5]。例如欧空局(European Space Agency, ESA)发布的气候变化倡议框架下(Climate Change Initiative, CCI)土壤水分产品[6],就是基于4种被动(SMMR、SSM/I、TMI和AMSR-E)和2种主动(SCAT和ASCAT)微波遥感产品生成的全球尺度30 a(1979~2008)土壤水分产品,但也有研究表明该融合数据在不同区域、不同下垫面时也体现出不同的精度[7,8]。
数据的不确定性是数据融合过程中需要考虑的关键因素,需要依据每个数据集的随机误差为其分配合理的权重。基于卡尔曼滤波的数据同化方法通常用于观测和模型模拟数据的融合,但是观测和模拟数据的误差依赖于主观假设,所以融合的结果可能不是最优的[9]。理想状况下,数据的不确定性评价需要绝对“真值”作为参考,但是现实中没有任何一种数据集可以作为绝对精确的参考数据[10]。尽管地面观测总是作为相对“真值”来验证遥感反演结果或产品,但也存在单点观测与像元的空间尺度不匹配和验证空间范围受限等问题,使得在这种情况得到的产品不确定性也存有疑问[11]。因此,如何更好地度量遥感土壤水分产品的不确定性以及在此基础上融合多源数据产品就成为了一个难点问题。
1998年,Stoffelend[12]发展了可以回避求取“真值”的数据质量评价方法——Triple-Collocation(TC),该方法可以客观地估计3个并列数据集的随机误差,并适用于区域及全球尺度。TC方法已在海洋[12,13]及水文气象[14,15]研究领域有广泛应用。Scipal等[16]首次在土壤水分遥感产品精度评价中引入了TC方法,并修正了数据系统性偏差对估计结果的影响,使其在土壤水分数据集的不确定性研究中陆续得以应用[17,18,19,20]。McColl等[21]扩展了TC方法,不仅将数据集的数量增加到4个,并且同时可以获取每个数据集和“真值”的相关性。Zwieback等[22]和Gruber等[23]将TC方法应用到任意个数据集的评价,同时考虑了误差间的相关性对误差估计的影响。除了对数据的进行分析和评价以外,TC方法的发展也为多源数据的融合提供了更为可靠的理论依据。Yilmaz等[24]对TC方法在数据融合中的应用进行了初步探讨,通过TC方法估算的产品随机误差对土壤水分的模型产品和遥感产品进行了融合。
前述研究表明,利用TC方法进行多源土壤水分产品的不确定性分析,并在此基础上进一步对其加以融合的方法还需进一步的探索,且针对中国区域的研究尚不多见。因此,本文采用TC方法评价了3种土壤水分遥感产品,包括来源于Advanced Microwave Scanning Radiometer 2(AMSR2)传感器的产品,以及SMOS和SMAP土壤水分产品,在获得不确定性定量评价结果的基础上,对3种遥感产品进行数据融合。
2 研究区与数据
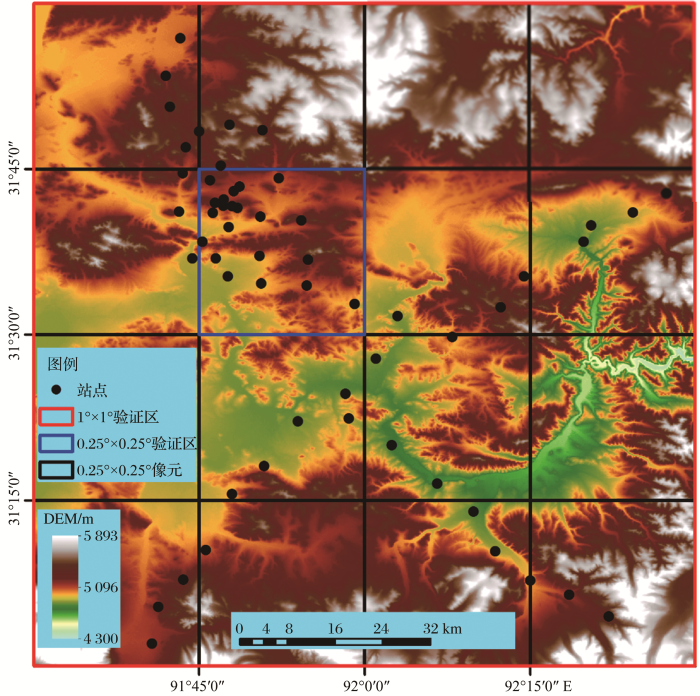
2.1 研究区
图1
2.2 数据及预处理
本文对2015年5~9月AMSR2、SMAP和SMOS 3种土壤水分遥感产品进行不确定性分析及数据融合研究。
被动微波辐射计AMSR2搭载在Global Change Observation Mission for Water-1(GCOM-W1)卫星上,于2012年5月发射。AMSR2包含6.9、7.3、10.7、18.7、23.8、36.5和89.0 GHz共7个频率的V和H极化,共有14个通道数据。本文所用AMSR2土壤水分数据由前向辐射传输模型Land Parameter Retrieval Model(LPRM)反演X波段(10 GHz)获得,空间分辨率0.25°,文中将每日升轨(13∶30)和降轨(01∶30)数据合成为逐日产品。
SMOS是世界上第一颗专用于提供全球土壤水分及海水盐分的卫星,由欧空局于2009年11月发射。该卫星搭载微波成像合成孔径辐射计MIRAS(Microwave Imaging Radiometer with Aperture Synthesis),工作于L波段(1.4 GHz),以多角度(0~55°)在约35~50 km空间分辨率上对地表土壤水分进行探测。SMOS以前向微波辐射传输模型L-MEB(L-Band Microwave Emission of the Biosphere)为核心实现土壤水分反演。本文采用Barcelona Expert Centre(BEC,
SMAP于2015年1月31日发射,搭载了L波段(1.26 GHz)的合成孔径雷达和L波段(1.41 GHz)的微波辐射计,其目标为提供全球尺度的高时空分辨率的地表土壤水分和冻融循环产品。本文采用了SMAP 36 km的辐射计土壤水分产品,依据面积权重的方法,将其重采样为25 km,以与SMOS和AMSR2产品保持一致,并将升轨和降轨数据合成为逐日产品。
虽然3种卫星遥感土壤水分产品都是来源于微波遥感观测,但或观测频率不同,或反演算法不同,每种产品都具有各自的特点和不确定性。在此基础上,本研究将通过TC方法对它们的不确定性进行定量分析并进一步将3种产品进行融合,得到精度更为可靠的土壤水分产品。
3 方 法
3.1 不确定性评价
Triple Collocation方法能够对3个无偏数据集的随机误差进行评价,假设误差是不相关的,数据集中的每个观测数据能够表达为[12]:
其中:
其中:
Triple Collocation方法是通过求取数据集间的协方差获取公式(2)中的误差项
其中:
根据公式(4),随机误差项
3.2 数据融合
本文所采用的数据融合方法是依据数据集的不确定性对3个数据集进行线性组合:
其中:
其中:
其中:矩阵的对角线为每个数据集的误差方差,误差方差由公式(5)估计得到。
4 结果与讨论
4.1 不确定性分析与评价
采用TC方法(公式4)对青藏高原那曲地区的三种土壤水分产品进行逐像元的不确定性评价。如图2所示,在1.0° × 1.0°的验证区,整体上AMSR2_LPRM产品的不确定性最高,SMAP产品的不确定性最低。AMSR2_LPRM、SMAP和SMOS 3种产品在空间范围内的平均不确定性分别为0.052、0.035和0.043 cm3/cm3;但从不确定性的空间分布来看,SMAP像元间的不确定性差异最大,其次是AMS2_LPRM产品。在0.25° × 0.25°的验证区域内,3种产品的不确定性较为接近,分别为0.052、0.049和0.047 cm3/cm3,理论上该区域的融合结果会与算数平均的结果较为接近,但当融合区域内部的误差分布存在较大差异时,传统的算数平均融合结果的可信度将难以确定。
图2
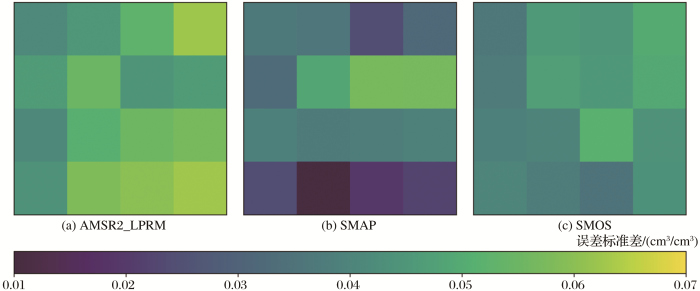
图2
3种土壤水分遥感产品的不确定性比较
Fig.2
Comparison of uncertainties among three soil moisture remote sensing products
4.2 优化权重值的确定
权重的确定是数据融合的关键步骤,由TC方法估计随机误差后,再依据公式(7)可为每种土壤水分产品估计的优化权重值。整体而言,SMAP产品的不确定性最低,对数据融合结果的贡献最大。但和图2比较,权重值与不确定性并无明显的定量关系,而是通过比较3种产品的不确定性,不确定性低的产品将被赋予更高的权重,这说明融合数据的每个像元都保留了精度最高产品的数据特征,有效地控制了融合数据的不确定性。
4.3 数据融合验证
基于TC方法估计的产品不确定性,采用公式(6)对3种土壤水分遥感产品分别在0.25°×0.25°和1.0°×1.0°两个验证区进行数据融合及验证。图4和图5分别展示了基于等权重和优化权重数据融合结果以及3种土壤水分遥感产品相对于参考值的差异。如表1所示,RMSE和相关系数为与地面观测比较所得。在0.25°×0.25°的验证区域,等权重和优化权重的融合结果非常接近,主要是由于3种产品在该区域的不确定性较为接近;但在1.0°×1.0°的验证区域,由于3种产品的不确定性差异较大,基于不确定性的数据融合方法相比于等权重方法在RMSE方面显示了明显的优势,误差减少了21.0%。从精度的统计结果可以看出,基于不确定性的优化权重融合结果的精度总是与精度最高的SMAP产品较为一致,但有效的数据量相比于SMAP产品增加了10.0%。
图3
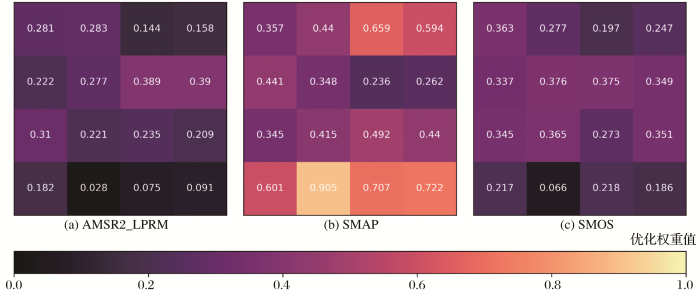
图3
3种土壤水分遥感产品的权重系数分配
Fig.3
Weighting coefficients assigned to three soil moisture remote sensing products
图4
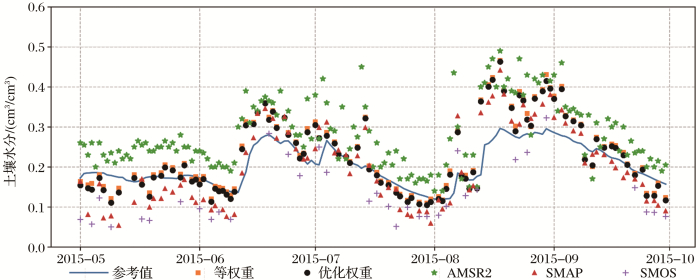
图4
0.25°×0.25°尺度的融合结果比较
Fig.4
Comparison of fusion result with three soil moisture products at 0.25°×0.25°scale
图5
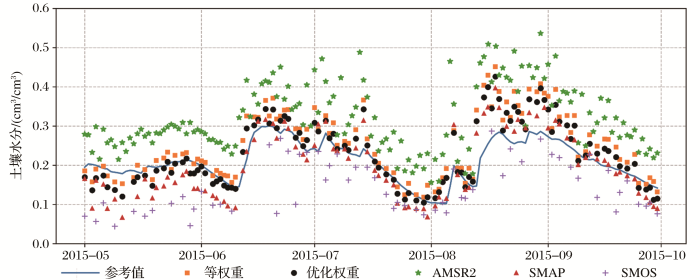
图5
1.0°×1.0°尺度的融合结果比较
Fig.5
Comparison of fusion result with three soil moisture products 1.0°×1.0°scale
表1 数据融合结果验证
Table 1
| 优化权重融合 | 等权重融合 | AMSR2_ LPRM | SMAP | SMOS | |
|---|---|---|---|---|---|
| RMSE(cm3/cm3) | |||||
| 0.25° | 0.057 | 0.059 | 0.096 | 0.058 | 0.071 |
| 1.00° | 0.049 | 0.062 | 0.123 | 0.048 | 0.078 |
| 相关系数 | |||||
| 0.25° | 0.884 | 0.881 | 0.773 | 0.890 | 0.826 |
| 1.00° | 0.868 | 0.854 | 0.774 | 0.864 | 0.694 |
5 结 论
本文采用Triple-Collocation方法,对AMSR2、SMAP和SMOS 3种土壤水分遥感产品进行不确定分析及数据融合研究。不确定性分析表明,AMSR2_LPRM、SMAP和SMOS三种产品在1.0° × 1.0°空间范围内的平均不确定性分别为0.052、0.035和0.043 cm3/cm3;空间分布上,SMAP像元间的不确定性差异最大,其次是AMS2_LPRM产品。在0.25° × 0.25°的验证区域内,3种产品的不确定性较为接近,分别为0.052、0.049和0.047 cm3/cm3。
在不确定性分析的基础上,对3种产品按照估计的相应权重进行线性融合。通过与研究区的地面观测对比,结果表明在0.25°×0.25°的验证区域,等权重和优化权重的融合结果非常接近,主要是由于3种产品在该区域的不确定性较为接近;但在1.0°×1.0°的验证区域,由于3种产品的不确定性差异较大,基于不确定性的数据融合方法相比于等权重方法显示出明显的优势,误差减少了21%。从精度统计结果可以看出,基于不确定性的优化权重融合结果的精度与精度最高的SMAP产品较为一致,但有效的数据量相比于SMAP产品增加了10%。
数据融合通常可以表达为多种数据的线性组合,关键在于确定每个数据集的权重系数,通过不确定性进行权重系数的确定是一种优化数据融合方法,而等权重方法只是多种数据集的不确定性相同时的特例,但该情况在现实中比较少见。通过本研究表明,基于不确定性分析的数据融合结果不仅可以继承高精度数据的优势,还可以增加有效数据量,而Triple-Collocation方法能够客观地估计每种数据集的不确定性,为数据融合提供了理论依据。
近年来,利用Triple-Collocation方法进行遥感产品的分析和验证的工作越来越受到关注,除了土壤水分[26,27,28],也包括其他遥感产品,例如针对反照率产品验证的探讨[29]。考虑到TC方法在运用时对数据样本量的要求,大部分的工作都集中于较大尺度和较长时间序列之上展开,但也有针对较小尺度的地面观测的相关研究,例如宇宙射线土壤水分观测[28]。此外,除了传统的遥感反演以外,还可以在TC方法分析的基础上,结合数据同化来估算地表土壤水分[30];以及借助TC方法在遥感土壤水分产品的基础上生产其他水循环变量全球产品[31]。因此可以看出,Triple-Collocation方法在应用于遥感产品的估算和验证中仍具有较多潜力,该方法本身在面对不同具体应用时也需要进一步发展,例如本研究中,TC方法仅能提供数据在时间序列上的不确定性,如果能够发展每个时刻或更短时序的不确定性的估计方法,将会进一步改善数据融合的精度。
参考文献
Investigating Soil Moisture-climate Interactions in A Changing Climate: A Review
[J].
SMOS: The Mission and the System
[J].
The Soil Moisture Active Passive (SMAP) Mission
[J].
Evaluation of Remotely Sensed and Modelled Soil Moisture Products Using Global Ground-based in Situ Observations
[J].
Triple Collocation-based Merging of Satellite Soil Moisture Retrievals
[J].
Trend-preserving Blending of Passive and Active Microwave Soil Moisture Retrievals
[J].
Evaluation of the ESA CCI Soil Moisture Product Using Ground-based Observations
[J].
Validation of the ESA CCI Soil Moisture Product in China
[J].
An Adaptive Ensemble Kalman Filter for Soil Moisture Data Assimilation
[J].
Principles and Methods for the Validation of Quantitative Remote Sensing Products
[J].
定量遥感产品真实性检验的基础与方法
[J],
Advances in Uncertainty Analysis for the Validation of Remote Sensing Products: Take Leaf Area Index for Example
[J].
遥感数据产品真实性检验不确定性分析研究进展
[J].
Toward the True Near‐surface Wind Speed: Error Modeling and Calibration Using Triple Collocation
[J].
Three-way Error Analysis Between AATSR, AMSR-E, and In-situ Sea Surface Temperature Observations
[J].
On the Quality of High‐resolution Scatterometer Winds
[J].
Triple Collocation of Summer Precipitation Retrievals from SEVIRI over Europe with Gridded Rain Gauge and Weather Radar Data
[J].
A Possible Solution for the Problem of Estimating the Error Structure of Global Soil Moisture Data Sets
[J].
Error Characterisation of Blobal Active and Passive Microwave Soil Moisture Datasets
[J].
A Dynamic Approach for Evaluating Coarse Scale Satellite Soil Moisture Products
[J].
Triple Collocation—A New Tool to Determine the Error Structure of Global Soil Moisture Products
[C]∥2010
Honolulu, Hawaii, USA, doi: 10.1109/IGARSS.2010.5652128.
Evaluation of Assumptions in Soil Moisture Triple Collocation Analysis
[J].
Extended Triple Collocation: Estimating Errors and Correlation Coefficients with Respect to an Unknown Target
[J].
Structural and Statistical Properties of the Collocation Technique for Error Characterization
[J].
Estimating Error Cross-correlations in Soil Moisture Data Sets Using Extended Collocation Analysis
[J].
An Objective Methodology for Merging Satellite and Model‐based Soil Moisture Products
[J].11502
.
A Multi-scale Soil Moisture and Freeze-thaw Monitoring Network on the Third Pole
[J].
Uncertainty of Reference Pixel Soil Moisture Averages Sampled at SMAP Core Validation Sites
[J].
Evaluation Analysis of NASA SMAP L3 and L4 and SPORT-LIS Soil Moisture Data in the United States
[J].
Using Cosmic-Ray Neutron Probes in Validating Satellite Soil Moisture Products and Land Surface Models
[J].
Direct Comparison and Triple Collocation: Which is More Reliable in the Validation of Coarse-scale Satellite Surface Albedo Products
[J].
Improving Surface Soil Moisture Estimates in West Africa Through GRACE Data Assimilation
[J].
SM2RAIN-ASCAT (2007-2018): Global Daily Satellite Rainfall Data from ASCAT Soil Moisture Observations
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}