




1 引言
随着硬件技术的不断进步,获取的LiDAR点云数据密度已可达到每平方米几十个点。高密度的点云数据有助于更细化的描述地形特征,但对于较平坦区域却带来了大量的数据冗余,这些冗余数据将直接影响数据的存储、处理和显示速度及效率,使现有点云处理算法、软件受到挑战,同时也提高了对硬件的要求。因此,点云抽稀是在确保满足生产精度或实际需求的基础上,对原始点云数据进行有规则的筛选,最大限度地精简点云数量。根据不同点云抽稀算法采用的规则,可归纳为随机采样算法与顾及地形特征的算法[3]。
顾及地形特征的算法中,多采用高程、高差、曲率和坡度等参数[6]。Pamelas提出的DDR(Data Density Reduction)抽稀算法,采用搜索半径划定邻域范围,控制抽稀率;采用高程阈值判断数据点间的高程差,控制抽稀精度。徐景中等[7]提出的基于点云离散度的抽稀算法,通过引入点云离散度的概念,即一个数据点高程与所有数据点高程平均值之差的绝对值,占所有数据点与高程平均值的差的绝对值之和的比重,有效地描述点云间高程差异与地形起伏的关系,通过设置离散度阈值,决定点云取舍。嫪志修等提出的基于坡度的抽稀算法,通过垂直与水平两个方向的坡度描述地形表面的粗糙度或复杂度,计算该点与所有相邻原始点云构建的TIN三角面的坡度,判断是否保留该点。杨明军等[9]提出的约束TIN节点抽稀法引入了高度差约束,并补充虚拟格网控制精度优化算法与传统算法进行组合。这些顾及地形特征的抽稀算法,在设计时考虑的目的不同,对不同地形的特征点保留能力强弱有别,导致抽稀效果也有较大差别。
侯文广等[10]提出在测地空间中采用泊松碟采样的抽稀算法,通过判断当前点与已有采样点的测地距离,决定是否将其加入采样点集,重复该过程直至无新的采样点加入,完成点云抽稀。算法定义加权测地距离调整不同地形的采样概率,保证经泊松碟采样后的精简模型能保留原始数据的地形特征信息。在文献[10]中,分别采用该算法与常用软件(Geomagic、ArcGIS、Rapidform)对山区DEM数据进行了抽稀实验,计算各精简模型生成的DEM与原始数据生成的DEM之间的偏差,结果显示经该算法精简后的点云生成的DEM精度最高,且有着最好的可视化效果[11]。但与城区LiDAR点云数据相比,DEM的点密度更小,因此对抽稀算法的效率要求更低。同时,该方法使用的加权测地距离,对不同地形特别是城区的适应性仍然有限。
本文考虑将泊松碟采样用于城区LiDAR点云数据的抽稀。由于山区点云数据与城区点云数据的地形特征有较大区别,城区存在的建筑物、道路、行道树和广场等包含了大量的冗余数据,故本文在该方法的基础上,提出了与所选点与其邻域内其他点间高度差标准差相关的加权测地距离计算方法,使基于测地距离的泊松碟采样对于城区点云数据抽稀的适用性更好。本文选取某城区的LiDAR点云数据,分别从抽稀速率、抽稀率以及建筑物角点保留率3个方面,验证了该算法的可行性与优越性。
2 基于测地距离的泊松碟采样
2.1 测地空间
测地空间为曲面重建提供了表面距离度量—测地距离。目前普遍认为,欧氏近邻概念中的两个近邻点之间的测地距离是用它们的欧氏距离来估计的。两个任意点之间的测地距离可以近似于连接两点的最短路径上所有近邻点的测地距离之和。因此,可以发现,当两个点位于崎岖的区域时,它们的测地距离比在平坦区域的测地距离要长。也就是说,在测地空间中,点的分布在很大程度上反映了原始地表的变化。
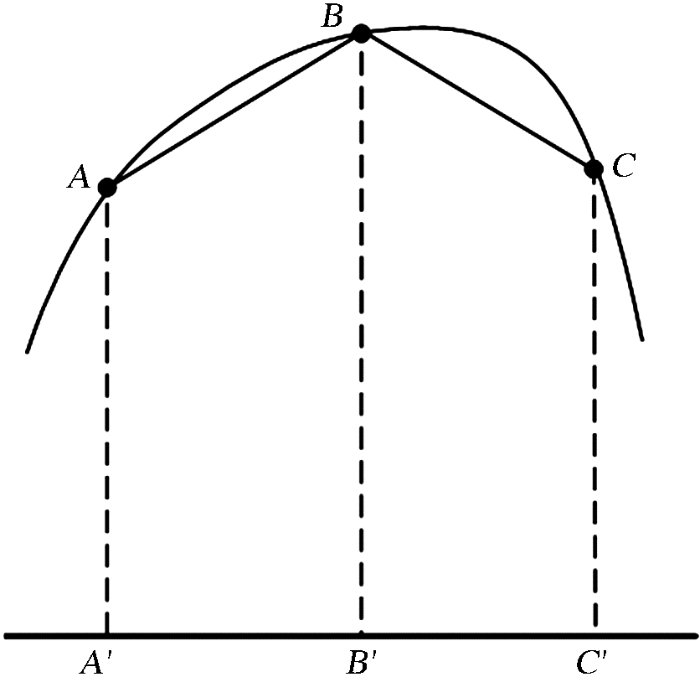
图1用一维流形曲线说明了该原理。A、B和C 3点在曲线上均匀分布,即弧长AB与弧长BC相等,它们在一维直线上的对应点分别为A'、B'和C'。然而,AB间的欧氏距离A'B'大于BC间的欧氏距离B'C',也就是说在一维直线上A'、B'和C' 3点并不是均匀分布的。实际上,沿着曲线从A到B、从B到C的最短弧长便是点AB、BC间对应的测地距离,通常可以近似为线段AB和BC。可以发现,当具有一定欧氏距离的两个点位于平坦区域时,它们的测地距离与欧氏距离接近;但当它们位于地形起伏较大的区域时,它们之间的测地距离将远大于其欧氏距离。这也是测地空间的基本特性。因此,在测地空间中进行均匀采样时,地形越复杂的区域,地面点的采样频率越大,而平坦地区的点采样频率相对较小。最终使得抽稀结果中,崎岖区域的采样点密集,而平坦地区采样点相对稀疏,从而实现了地形自适应采样的目的。
图1
2.2 泊松碟采样
泊松碟采样是指在离源点一定距离以外的范围内获取采样点。在一定的空间范围内,按照任意两个采样点之间的距离需大于某一阈值的原则,随机地生成采样点,直到该空间内无法插入新的采样点为止。该方法得到的采样点在欧氏空间中是均匀分布但不规则的,这一特征能有效避免图像重建过程中混沌现象的出现。
本文采用泊松碟采样中的经典方法投掷算法[12],将此策略扩展到三维点云空间。在采样之前,首先给出一个阈值,将该值作为相邻两点间所能允许的最小测地距离间隔。然后从LiDAR点云中随机选取一个点,如果其他点到该点的测地距离小于阈值,则被标记为不可接受(已采样的点和不可接受的点将永远不再被访问)。接着,从剩余的点云数据中随机选取采样点,并重复整个过程,直到再也无法访问任何点。采样完成后,任意两个采样点之间的测地距离都将大于阈值。这一过程就是典型的泊松碟采样投掷算法,过程中所给定的阈值就是泊松碟半径。泊松碟半径越大,采样点越稀疏。该算法是泊松碟采样的严格方法,虽然当所需的采样点数较大时,计算相当耗时,但由于本文将该方法用于从LiDAR点云数据中随机取点,与常规投掷算法中生成采样点的方法略有不同,因此计算量仍在可接受的范围内。并且由于在三维点云测地空间中,各向同性这一条件不再满足,因此很多更快速的算法无法直接运用,故本文只考虑经典的投掷算法。
2.3 改进的基于测地距离的泊松碟采样
由于欧氏空间各向同性的特点,直接使用泊松碟采样得到的是均匀分布但不规则的采样点,无法良好保留LiDAR点云数据的地形特征。故考虑引入测地距离解决这一问题。
使用测地距离作为距离度量进行泊松碟采样,其采样结果将在测地空间中均匀分布,但在欧氏度量中这种分布是地形自适应的。在实际应用中,为了灵活地调整样本分布,适应各种不同的地形,如平原、山地、丘陵等,定义了加权测地距离来计算两点间的测地距离。理想情况下,权重取决于点云数据的几何属性,则加权测地距离可以表示为:
其中:dS表示所选点P和已采样点P0间的加权测地距离,
然而,该方法仍存在一定的缺陷,因为它只影响存在高度差的两点间测地距离,容易导致采样点沿高度差较大的山脊、山谷、建筑物边沿等处堆积。特别是在处理城区LiDAR点云数据时,高度差在建筑物轮廓处发生突变,而轮廓两边的区域都相对平坦,这一特点容易导致在泊松碟半径较大时,部分建筑物细节(如小阳台、楼梯等)被忽略。考虑到建筑物轮廓的突变性和采样的全局适应性与局部均匀性,本文构造了基于邻近点高度差标准差的局部自适应函数。对于任意一点,定义其k值为:
其中:
其中:Hi、Hj分别为点
在测地距离的计算方法确定的条件下,泊松碟半径的值可以基本决定采样点的数量。若已知原始点云数据点数为N,期望采样点数为NS,则泊松碟半径可通过以下方法确定:从原始点云中任选一点,从该点出发由近到远的计算该点与其邻域内其他点的测地距离,当已访问点的数量为N/NS时,选取此时所有已访问点的测地距离的最大值。将以上步骤重复多次,取所有最大测地距离的平均值,则该值就是所需的泊松碟半径。本文为将该方法用于城市的三维刻画,并没有明确的期望密度值,故期望采样点数NS无法确定。因此,本文采用不同的采样半径对多组数据进行试验,通过对试验结果的对比和分析论证了新方法的可用性和适用性。
3 实验数据
选取了某城区4块不同区域的机载LiDAR点云作为测试数据,如图2所示为区域一至区域四按照高程渲染的显示结果。所用数据的平均点云密度较大,并且地物类型复杂,既包括形状复杂的建筑物,也包括高矮不同的树木、灌木丛以及交通设施。因此选用该组数据进行试验,以验证本文算法对于城区点云数据抽稀的适用性。
图2

通过对这4组数据采用不同的泊松碟半径进行多次试验,将验证该算法能否针对城区不同的地形特征,在保留建筑物外轮廓及角点的同时,大量减少建筑物顶部、公路及广场等平坦区域的点云数量。四块区域的详细信息见表1。
表1 数据详细信息表
Table 1
| 序号 | 点云密度/(点/m2) | 文件大小/MB | 点云数/个 | 建筑物数/个 | 建筑物角点数/个 |
|---|---|---|---|---|---|
| 一 | 37.88 | 27.5 | 1 032 561 | 9 | 182 |
| 二 | 35.98 | 30.6 | 1 148 402 | 9 | 184 |
| 三 | 30.04 | 19.8 | 743 775 | 5 | 60 |
| 四 | 21.83 | 21.3 | 800 430 | 13 | 156 |
4 实验方法及结果
图3
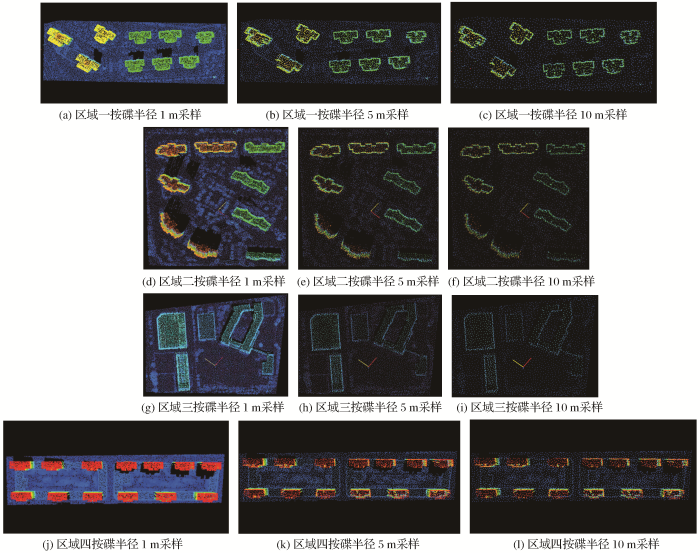
原始数据中,点云密度较大,最高可达30.6点/m2,能够完整刻画建筑物轮廓,但建筑物屋顶及道路、地面等平坦区域的点云却过于密集,这部分点云并不会对点云数据的实际应用如建筑物的三维重建等起到实际帮助,反而会影响软件的处理效率,因此对该部分点云进行抽稀是必要的。从视觉效果上来说,观察实验结果可以发现,碟半径为1 h时,建筑物屋顶、地面点及道路等平坦区域的点云数量明显减少,与此同时建筑物轮廓得到了很好的保留;碟半径为5 h时,建筑物轮廓仍较为明显,但存在少量建筑物角点的缺失,使得部分建筑物轮廓略微模糊,细节表现较差;当碟半径为10 m时,较多的建筑物角点缺失导致部分建筑物仅能展现大致轮廓。
为了对实验结果进行更客观的评价,记录了算法运行时间用于评价抽稀速率,记录采样后点云数量用于评价抽稀率,并采用人工视觉判读的方式记录采样前后建筑物角点的数量以计算建筑物角点保留率。经统计和计算后得到的结果如表2所示。
表2 实验结果
Table 2
| 编号 | 碟半径 /m | 计算耗时/s | 点云密度 (点/m2) | 实际抽稀率/% | 建筑物角 点数/个 | 建筑物角点保留率/% |
|---|---|---|---|---|---|---|
| 1-1 | 1 | 3.01 | 1.99 | 94.73 | 180 | 98.90 |
| 1-5 | 5 | 2.86 | 0.44 | 98.84 | 158 | 86.81 |
| 1-10 | 10 | 2.94 | 0.22 | 99.41 | 128 | 70.33 |
| 2-1 | 1 | 3.30 | 2.39 | 93.35 | 184 | 100.00 |
| 2-5 | 5 | 3.16 | 0.53 | 98.53 | 161 | 87.50 |
| 2-10 | 10 | 3.10 | 0.27 | 99.26 | 133 | 72.28 |
| 3-1 | 1 | 2.17 | 1.46 | 94.40 | 50 | 83.33 |
| 3-5 | 5 | 2.25 | 0.32 | 98.86 | 41 | 68.33 |
| 3-10 | 10 | 2.15 | 0.16 | 99.42 | 35 | 58.33 |
| 4-1 | 1 | 2.27 | 1.59 | 92.70 | 156 | 100.00 |
| 4-5 | 5 | 2.23 | 0.43 | 98.03 | 130 | 83.33 |
| 4-10 | 10 | 2.2 | 0.22 | 99.00 | 104 | 66.67 |
| 平均-1 | 1 | 10.75 | 2.48 | 93.80 | / | 97.59 |
| 平均-5 | 5 | 10.5 | 0.57 | 98.57 | / | 84.19 |
| 平均-10 | 10 | 10.39 | 0.29 | 99.27 | / | 68.73 |
观察数据结果可以发现,整体而言,碟半径对于抽稀速率并无太大影响,不同碟半径下的实验均可很快得到结果。当碟半径为1 m时,平均抽稀率为93.80%,平均建筑物角点保留率为97.59%,几乎所有建筑物角点都得到保留。当碟半径为5 m时,平均抽稀率为98.57%,平均建筑物角点保留率为84.19%,其结果较好地保留了建筑物角点。当碟半径为10 m时,平均抽稀率为99.27%,平均建筑物角点保留率为68.73%,此时建筑物角点的缺失较为严重。
5 结 论
针对城区点云数据中,建筑物屋顶、道路及广场等存在大量的冗余数据,本文基于测地空间中泊松碟采样算法的地形自适应性,提出了一种适用于城区点云数据的自适应采样方法。该方法得到的采样点集不仅兼顾了地形变化和分布的均匀性,并且较好地保持了原始数据中的建筑物特征,使得采样结果更适用于城区建筑物的三维可视化。4组实验中,统计了抽稀速率、抽稀率和建筑物角点保留率3个指标,统计结果及抽稀渲染结果均表明,该算法能顾及城区点云数据的三维特征,特别是在碟半径为1 m的条件下,抽稀率可达93.8%且能很好地保留原始数据的建筑物角点,采样结果满足城区三维可视化、三维重建等后续应用的需求。进一步的工作将研究如何通过确定的抽稀率来计算采样半径,并针对大数据量点云数据处理研究CPU/GPU加速方法以提高运算效率,从而确保更多应用的需求。
参考文献
Present Situation and Prospect of Airborne LiDAR Technology
[J].
机载激光雷达技术现状及展望
[J].
Fundamentals and Applications of Airborne LiDAR
[M].
机载激光雷达基础原理与应用
[M].
Research Review on Thinning Algorithm of Airborne LiDAR Point Cloud Data
[J].
机载LiDAR点云数据抽稀算法研究述评
[J].
Theory and Method of Airborne LiDAR Measurement Technology
[M].
机载激光雷达测量技术理论与方法
[M].
The Application of Airborn LiDAR Technique in Rapid Production for High-accuracy DEM
[J].
机载LiDAR技术在快速生产高精度DEM中的应用
[J].
Road Extraction Using Airborne LiDAR Data in Mountainous Areas
[J].
机载LiDAR数据提取山区道路方法研究
[J].
On Simplification Method for LiDAR Ground Points Cloud
[J].
LiDAR地面点云的简化方法研究
[J].
Discussion on Thinning Algorithm for Construction of DEM based on Airborne LiDAR Data
[J].
基于机载LiDAR数据构建的DEM抽稀算法研究
[J].
Study and Application on Thinning Algorithm of Airborne LiDAR Data in Plain Area
[J].
平原地区机载激光雷达数据的抽稀算法分析
[J].
Poisson Disk Sampling in Geodesic Metric for DEM Simplification
[J].
Poisson Disk Sampling in Geodesic Metric for DEM Simplification
[J].
测地空间中泊松碟采样的地形模型约简方法
[J].
Method Optimization and Accuracy Evaluation of Terrain and Buildings Extraction based on LiDAR and CCD Data
[J].
基于LiDAR和CCD数据的地形与建筑提取方法优化及精度评价
[J].
Method of Land Cover Refined Classification Supported by LiDAR Point Clouds
[J].
LiDAR点云支持下地物精细分类的实现方法
[J].
Research on Elimination of Non-building Points in Airborne LiDAR Building Point Cloud
[J].
机载LiDAR建筑物点云中非建筑物点剔除研究
[J].
Extraction of Building Contours and Corners from Terrestrial LiDAR Data
[J].
地面LiDAR数据中建筑轮廓和角点提取
[J].
Thinning Algorithm of LiDAR Bare Earth Surface Point Cloud Under the Restriction of Precision
[D].
精度约束下地表LiDAR点云抽稀方法研究
[D].
A Method of Extracting Building based on LiDAR Point Clouds
[J].
一种基于LiDAR点云的建筑物提取方法
[J].
LiDAR Point Cloud Thinning Algorithm for Road Survey and Design
[J].方程喜, 隋立春, 朱海雄
用于公路勘测设计的LiDAR点云抽稀算法
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}