




1 引 言
目前,国内外已经发展了多种云检测方法,主要分为3大类:阈值法、图像处理法和深度学习法。阈值云检测算法运算高效且操作简单目前已成为运用最普遍的云检测方法,其原理是利用云与典型地物在相同通道处的反射率、亮度、温度等差异来进行云检测[6,7]。随着云检测技术的发展,阈值云检测也从最早的固定阈值发展为现在的动态阈值。常见的传统固定阈值法主要包括早期发展的ISCCP算法[8,9]、APOLLO算法[10]和CLAVR算法[11]。在动态阈值研究方面,Sun等[12]提出了UDTCDA动态阈值云检测算法,针对空间分辨率为500 m的MODIS地表反射率数据,通过6S大气传输模型模拟出动态阈值,进行各类云的自动检测,由于地表覆盖的变化对数据库的更新提出了较高的要求,在一定程度上限制了该方法的广泛应用。Zhou等[13]研究了一种基于全球30 m高空间分辨率的土地覆盖数据的云检测算法,该算法针对不同的土地覆盖类型得到相应的阈值,利用Landsat 5数据进行云检测算法验证,取得了较高的精度。高贤君等[14]研究航空摄影过程中云的实时自动检测,选取云的亮度特征和归一化差值特征,通过最大类间方差Otsu原理的分级配置,为云特征设定适宜的自动阈值。图像处理法一般是使用不同的方法提取图像灰度、纹理等特征,并基于此进行图像分割来实现云检测。Liu等[15]提出了一种基于超像素分割的云检测算法,该方法根据云的特性,能够通过超像素分割算法自适应地获得阈值。谭凯等[16]通过颜色转换模型将RGB影像转换至HIS颜色空间,结合影像强度信息与饱和度信息,提取纹理特征信息,实现云精确提取。费文龙等[17]提出一种基于图割模型的卫星云图云检测方法,提取出多个灰度特征和Gabor纹理特征,通过主成分分析降维,利用改进的Normalized Cuts模型将影像分割成晴空区域和有云区域。深度学习法主要是通过模糊数学算法训练数据集,获得样本先验特征知识,计算云概率达到对云的自动识别。Li等[18]提出一种基于支持向量机(SVM)的云检测方法,首先提取云特征,利用SVM分类器训练获得分类模板,实现卫星影像云检测。陈洋等[19]研究利用主成分分析、支持向量机的方法进行资源三号卫星遥感影像云检测,该方法取得了较高的精度且不受光谱范围的限制。翁理国等[20]通过大量实验获取最优的深度学习网络结构,利用多层神经网络进行遥感影像上云的特征提取。
固定阈值法中的阈值多是根据云与典型地物的像元组分光谱差异由经验分析得到,然而实际地表结构复杂,地形、地貌、多种地物的组合及大气环境等都会对云检测结果造成不利影响,这严重限制了固定阈值的应用。由于图像处理方法较多,提取纹理的算法错综复杂,且需要借助其它方法才能进一步实现云检测。利用深度学习进行云检测需要设置最优参数才能取得较高的精度,但最优参数的设置是一个复杂的过程。对于复杂的陆面组成和云类型,动态阈值法使云检测结果具有较高的精度。Sun等[21]提出了一种自动云检测算法(Cloud Detection Algorihtm-Generating,CDAG),该算法基于高光谱、高空间分辨率遥感数据像元库,考虑了混合像元的综合波谱特征的复杂性,能减小混合像元、复杂表面结构和大气等因素的影响。
本文旨在开展CDAG算法对高分四号多光谱卫星影像(GF4-PMS)的云检测应用能力分析。基于AVIRIS影像提取不同云类型和各种地表覆盖类型的终端像元库,根据GF4-PMS传感器光谱响应函数模拟出多光谱数据的终端像元库;以云像元和晴空像元的光谱差异为标准自动生成云检测算法,实现GF4-PMS影像的自动云检测;选取不同时相、不同地表类型、不同特征的云覆盖样区进行精度验证,以期获取高精度的GF4-PMS影像去云效果。
2 数据与方法
2.1 数据与预处理
高分四号卫星是我国高分辨率对地观测系统的重要组成部分,于2015年12月29日成功发射。该卫星搭载的传感器具有可见光、近红外和中波红外成像通道,其中可见光、近红外的光谱范围在0.45~0.90 μm之间,空间分辨率为50 m,中波红外的光谱范围在3.5~4.1 μm之间,空间分辨率为400 m,影像重访时间间隔为20 s。用于构建终端像元库的AVIRIS数据具有224个波段,波段范围为0.4~2.4 μm,空间分辨率为20 m,具有高光谱分辨率、高空间分辨率的优点。
遥感影像预处理:RPC正射校正、辐射定标以及表观反射率计算。GF-4PMS影像的正射几何校正通过有理函数模型完成,辐射定标所用的参数由中国资源卫星应用服务中心提供,根据式(1)将卫星图像DN值转换为辐射亮度图像,进而根据式(2)将辐射亮度值转换到表观反射率。
其中:
其中:
2.2 CDAG云检测算法
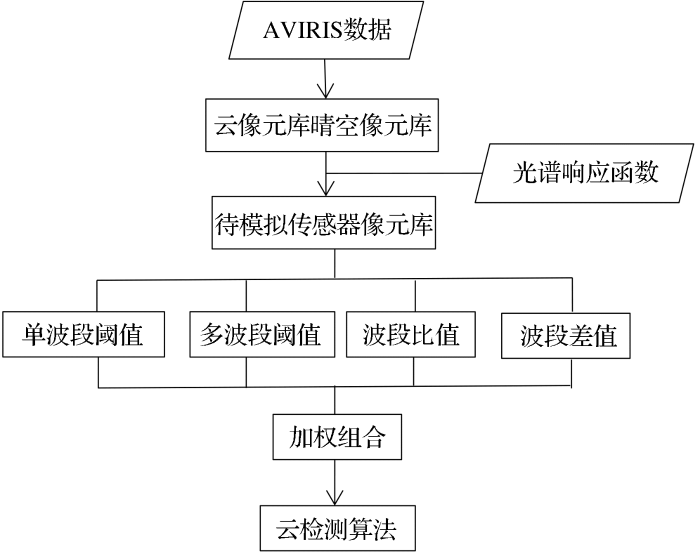
CDAG算法是基于高光谱、高空间分辨率AVIRIS遥感数据支持的云检测方法。通过像元库建立、数据模拟、波段运算和统计分析等实现云检测阈值自动确定,能有效解决混合像素、复杂表面结构和大气等因素的影响。CDAG算法进行云检测的流程图如图1所示。
图1
2.3 终端像元库构建
模拟待检测传感器的像元库和晴空像元库是目标遥感影像云检测的前提。利用AVIRIS影像构建终端像元库的基本流程包括:从AVIRIS影像选取不同的云类型和各种地表覆盖类型的终端像元,然后根据光谱响应函数模拟GF4-PMS多光谱像元库,并模拟多光谱像元与GF4-PMS对应的真实像元进行一致性分析。
从AVIRIS影像上选取不同的云类型和各种地表覆盖类型建立云像元库和晴空像元库,各类像元均为200个以上。云像元库不仅包括薄云、厚云、碎云和云边缘,还包括不同地表类型上空的云,包括高植被覆盖区上空的云、亮地表上空的云、水体上空的云和山地上空的云;晴空像元库包括植被、水体、岩石和人工地表等土地覆盖类型。
数据模拟过程中目标波段的输出能量与光谱响应函数及源数据相关波段的光谱反射率有关。基于AVIRIS像元库进行波段合成产生多光谱传感器GF-4PMS像元库,确保模拟的GF-4PMS反射率值与高光谱数据的反射率值具有一致性。式(3)是数据模拟的公式。
其中:
2.4 自动云检测
多光谱传感器云检测算法的自动生成过程是基于波段运算和统计分析,确定云像元和晴空像元的光谱差异,并根据光谱相似性自动迭代各种云类型和非云像元的分割阈值,实现薄云、碎云和厚云的自动检测。为了尽可能减少误判,设置单波段、多波段、波段比值3种算法形式来构建云检测复合算法,有助于凸显云的特征信息,并且能消除部分太阳高度角、卫星观测角及大气程辐射的影响。CDAG算法生成过程中,阈值从算法统计的最小值到最大值之间以0.01为间隔滑动与迭代,以4%误判率为限,自动筛选云像元检测正确率最高的阈值为最佳阈值。
结合3种云检测算法的正确率,对不同算法结果进行加权计算,生成云概率图,见式(4)。云概率图的高低表示其为云像元的可能性值,概率越大表示判定为云的可能性越大。
其中:Fi对应各种云检测算法的结果,Qi是对应权重,N为最终生成的算法总数。
2.5 精度评价方法
为了进一步评价CDAG法的适用性和精确性,使用目视解译法对影像中的云进行人工数字化,作为基准值对GF4-PMS云检测结果进行精度验证。在GF4-PMS影像中选取不同下垫面的样区,在ArcGIS软件中采用人工勾选图斑的方式提取影像中的云,然后转化为栅格图对云检测结果图进行误差矩阵分析,分别计算云像元正确率、漏判率、误判率和晴空像元正确率。云像元识别正确率和错判率之和为1,晴空像元识别正确率和漏判率之和为1。公式如下:
其中:CR为云像元正确率,SR为晴空像元正确率,ER为像元误判率,MR为像元漏判率,TP为正确识别的云像元的个数,TN为正确识别的晴空像元的个数,FP为参考影像中被误判为云像元的晴空像元的个数,FN为云像元漏判为晴空像元的个数,TC为云像元总个数,TS为晴空像元的总个数。
3 结果分析
3.1 不同时相的GF4-PMS影像云检测
选取不同时相GF4-PMS影像进行云检测分析。根据正确率设置不同权重:当正确率小于87%时,权重为1;当正确率介于87%~90%之间时,权重为2;当正确率大于90%时,权重为3。图3是GF4-PMS原始影像与云检测结果,该影像覆盖区域是我国东南沿海地区,不同时相的云得到有效识别,并可根据云位置来判断云运动方向和速率。
图2
图3
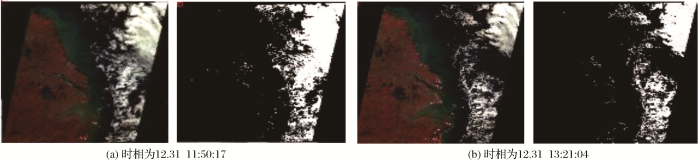
图3
不同时相的GF4-PMS影像云检测结果
Fig.3
Cloud detection results of different temporal GF4-PMS images
3.2 GF4-PMS影像的不同类型云检测能力分析
鉴于GF4-PMS影像幅宽为400 km,同景影像上存在大量不同类型的云。为了验证CDAG法对于多类型云的自动检测能力,选取具有不同下垫面的子区影像进行云检测。图4从上往下依次是碎云、薄云及厚云,下垫面种类包括森林、海洋、植被、城镇、沙漠及山地等。
图4
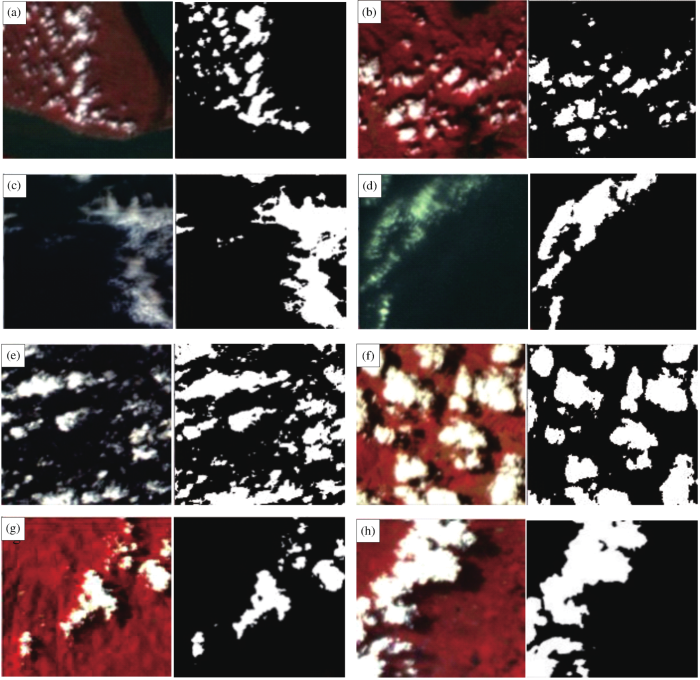
碎云和薄云的外部轮廓不太清晰,薄云云体很薄有融合成片的现象,碎云的云体较小且分布比较零散。由于薄云的反射率较低,其波谱特性与下垫面相似,在云检测过程中较易与地表地物混淆,常伴有漏判现象[20]。而CDAG算法能根据云和下垫面之间的微小差异将大部分的薄碎云识别出来,而厚云识别效果由于薄云、碎云,这是由于厚云由高空对流产生,轮廓分明、清晰完整,云块之间很少有空隙、厚度比较均匀,其反射率值一般与其下垫面相比较高,因此不同下垫面上方的厚云检测效果均很好。下垫面为城镇用地时,CDAG算法能有效地将城镇用地与云像元分开(如图4(h)所示),薄云、碎云、厚云均取得较好的识别效果。对于海岸区域,海岸与水体上方的云检测受下垫面的变化及复杂性的影响,存在部分薄云漏判现象(如图4(d)),但整体上薄云和碎云均能够被完整的提取出来。结果表明:该方法可以识别不同时相、不同下垫面上空的云,使云检测结果更精确、可靠。
4 精度验证
云像元正确率和晴空像元正确率是衡量检测结果的标准。表2是这6幅样区影像的定量检测结果。结果表明,CDAG云检测法对GF-4PMS数据有较高的检测精度,云检测结果中的云含量与真实云含量较为接近,具有较高的云像元识别正确率(CR>89%)和晴空像元识别正确率(SR>92%),同时具有较小的错分误差(ER<8%)和漏分误差(MR<11%)。厚云多的区域检测精度相对较高,错分和漏分现象较少。此外,该方法能够识别大部分的薄云及其边缘;碎云多的影像则精度相对偏低,存在一定的漏判率;植被下垫面的云误判率均低于水体、城镇和沙漠,其中大范围沙漠区的云误判率最高;对于城镇和沙漠等亮地表区,CDAG法仍然具有很高的云识别精度,能够正确识别高亮区域上的厚云,且能识别出大部分碎云和薄云。此外,影像中云的类型、数量以及影像中地表覆盖类型的复杂程度对于云检测精度存在一定的影响。
表1 GF-4PMS云检测算法
Table 1
| 单波段 | 波段组合 | 波段比值 | ||
|---|---|---|---|---|
| Band 1(0.17) | Band 1, Band 2(0.18,0.14) | Band 3/ Band 1(0.91,1.06) | ||
| Band 2(0.19) | Band 1, Band 3(0.18,0.1) | Band 3/ Band 2(0.99,1.06) | ||
| Band 1, Band 4(0.14,0.28) | ||||
| Band 2, Band 4(0.14,0.3) |
表2 GF4-PMS云检测结果精度评价结果
Table 2
| 影像编号 | 云像元正确率/% | 晴空像元正确率/% | 误判率/% | 漏判率/% | 地表类型 | 主要云类型 |
|---|---|---|---|---|---|---|
| 1 | 92.21 | 99.43 | 0.57 | 7.01 | 植被 | 厚云 |
| 2 | 89.43 | 99.20 | 0.89 | 10.65 | 植被 | 碎云 |
| 3 | 91.54 | 95.75 | 4.32 | 8.97 | 水体 | 碎云 |
| 4 | 92.48 | 98.67 | 1.39 | 7.21 | 水体 | 薄云 |
| 5 | 91.80 | 97.64 | 2.16 | 8.74 | 城镇 | 厚云 |
| 6 | 96.55 | 92.31 | 7.80 | 3.45 | 沙漠 | 厚云 |
5 讨 论
合理高效的自动云检测方法有助于提升多光谱卫星影像的实际应用能力。高分四号卫星是我国首颗地球静止轨道高分辨率光谱遥感卫星,利用长期驻留固定区域上空和快速指向调整的优势,可实现高时间分辨率和较高空间分辨率的大范围遥感监测。本文提出了一种先验终端像元库自动云检测方法,可有效检测不同时相、不同下垫面的GF4-PMS影像的碎云、薄云和厚云。当前自动云检测算法在高分一号多光谱影像[22]、Landsat系列卫星多光谱影像[23]、MODIS多光谱影像[24]等数据源得到深入研究与应用,并提出多种类型的云检测算法。如Zhu等[25]提出了多源自动时序分析云检测算法,对Landsat8 OLI影像、Landsat4 MSS影像以及Sentinel-2影像实现了云及云阴影的高精度检测;Qiu等[26]提出了一种MFmask云检测算法,融合了Landsat表观反射率、亮温和DEM信息,有效提升Landsat 4-8影像在山区云及云阴影的检测精度; Chai等[27]应用深度卷积神经网络模型,在Lanssat7与Landsat8影像的云和云阴影识别上取得95%的总体精度。Zhai等[28]整合了可见光和近红外光谱信息,面向Landsat5多光谱影像构建了云与云阴影检测光谱指数(CSD-SI)。本文提出了一种基于先验终端像元库的自动云检测算法,能充分发挥GF-4 PMS影像对于各种云的光谱特征信息,采用的光谱相似概率分析方法的计算效率较高,对于不同时相、不同下垫面的碎云、薄云、厚云均取得了较高的检测精度。
本文采用高光谱影像来构建先验终端像元库,目前考虑了碎云、薄云、厚云云边缘以及植被、水体、岩石和人工地表等地表类型,实际地表类型要大于上述4类,且不同植被具有较明显的季相规律,有必要在今后的应用中考虑更为复杂的下垫面特征,丰富先验终端像元库。此外,本文主要实现了各种云的高效检测,目前尚未涉及云阴影的自动检测,将在后续的研究中加强对于GF-4 PMS影像的云阴影检测。
6 结 语
本文将CDAG算法应用于GF4-PMS数据的云检测上,利用AVIRIS像元库及GF4-PMS传感器的光谱响应函数等参数进行数据模拟建立GF4-PMS云像元库和晴空像元库,通过波段运算、统计分析、加权合成等生成云概率图,并实现阈值自动迭代的云检测。选取多时相、多种下垫面的GF4-PMS影像进行验证分析。结果表明,CDAG算法对不同时相、不同下垫面的GF4-PMS影像能高效地识别出厚云、薄云及碎云,精度均在90%以上。该方法应用于GF4-PMS影像云检测主要存在以下误差:在薄云处有时会出现局部漏判现象;海岸区域位于海陆交错的地带,其下垫面较为复杂,在可见光近红外波段的反射率与云接近,导致该区域的云检测的精度较低;亮地表区域(如城镇、道路、裸地)及部分高亮植被覆盖区域具有较高的地表反射率,不易将其和薄云区分,存在少量的薄云误判现象。
参考文献
High Accuracy On-orbit Geometric Calibration of Geostationary Satellite GF4
[J].高分四号静止轨道卫星高精度在轨几何定标
[J].
Performance Assessment of Atmospheric Correction for Multimuspectral Data of GF-4 on Inland CaseⅡTurbid Water
[J].浑浊二类水体的高分四号卫星大气校正效果分析
[J].
Improvement of Dynamic Threshold Cloud Detection Algorithm and Its Application in High Resolution Satellite
[J].动态阈值云检测方法改进及高分辨率卫星应用
[J].
Cloud and Cloud Shadow Detection Algorithm for Gaofen-4 Satellite Data
[J].高分四号卫星数据云和云阴影检测算法
[J].
Application of GF-4 Satellite in Drought Remote Sensing Monitoring: A case study of Southeastern Inner Mongolia
[J].高分四号卫星在干旱遥感监测中的应用
[J].
A Cloud Shadow Detection Method Dombined with Cloud Height Iteration and Spectral Analysis for Landsat 8 OLI Data
[J].
Fmask 4.0: Improved Cloud and Cloud Shadow Detection in Landsats 4–8 and Sentinel-2 Imagery
[J].
ISCCP Cloud Algorithm Intercomparison
[J].
Cloud Detection Using Satellite Measurements of Infrared and Visible Radiances for ISCCP
[J].
The Cloud Analysis Tool APOLLO: Improvements and Validations
[J].
Global Distribution of Cloud Cover Derived from NOAA/AVHRR Operational Satellite Data
[J].
A Universal Dynamic Threshold Cloud Detection Algorithm (UDTCDA) Supported by a Prior Surface Reflectance Database
[J].
A New Cloud Detection Method Supported by GlobeLand30 Data Set
[J].
Real-Time Automatic Cloud Detection during the Process of Taking Aerial Photographs
[J].航空摄影过程中云的实时自动检测
[J].
Automatic Cloud Detection for All-Sky Images Using Superpixel Segmentation
[J].
Automatic Cloud Detection for Chinese High Resolution Remote Sensing Satellite Imagery
[J].国产高分辨率遥感卫星影像自动云检测
[J].
Application of Graph Cut Method in Cloud Detection in Satellite Cloud Image
[J].费文龙, 吕红, 韦志辉
.图割模型在卫星云图云检测中的应用
[J].
A Cloud Image Detection Method based on SVM Vector Machine
[J].
Cloud Detection of ZY-3 Satellite Remote Sensing Image based on Deep Learning
[J].
基于深度学习的资源三号卫星遥感影像云检测方法
[J].
Satellite Imagery Cloud Fraction based on Deep Extreme Learning Machine
[J].翁理国
.基于深度极限学习机的卫星云图云量计算
[J].
A Cloud Detection Algorithm-generating Method for Remote Sensing Data at Visible to Short-wave Infrared Wavelengths
[J].
Multi-feature Combined Cloud and Cloud Shadow Detection in GaoFen-1 Wide Field of View Imagery
[J].
Cloud Detection Algorithm Comparison and Validation for Operational Landsat data Products
[J].
New Neural Network Cloud Mask Algorithm based on Radiative Transfer Simulations
[J].
An Automatic Method for Screening Clouds and Cloud Shadows in Optical Satellite Image Yime Series in Cloudy Regions
[J].
Improving Fmask Cloud and Dloud Shadow Detection Inmountainous Area for Landsats 4–8 Images
[J].
Cloud and Cloud Shadow Detection in Landsat Imagery based on Deep Convolutional Neural Betworks
[J].
Cloud/Shadow Detection based on Spectral Indices for Multi-hyperspectral Optical Remote Sensing Imagery
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}