




1 引 言
郁闭度是反映森林生长和森林质量的重要指标,是小班区划、制定经营措施的重要参考依据[1]。因此,如何快速、准确地获取森林郁闭度参数具有重要的实践意义。传统的郁闭度调查方法主要有目测法、样点法、样线法、树冠投影法以及遥感影像估测法等[2]。目测法主要依据人工目视判断,得到的郁闭度精度较低,存在一定的主观性;样点法主要依据系统抽样与随机抽样的方法,得到郁闭度的结果不一致;样线法是通过使用树冠的冠幅长度与二对角线的长度之比得到,但样线法未考虑树冠之间的空隙;树冠投影法是一种较为准确的郁闭度测定方法,具体操作过程是将树木在一定区域内定位,测量树冠边缘到树干的水平距离,按照一定投影比例将树冠投影绘制于图纸上,计算树冠投影总面积与林地总面积之比得到郁闭度,但此种方法需要耗费大量的人力物力。一些研究者使用遥感影像开展了郁闭度估测方面的研究,谭炳香等[3]基于Hyperion 高光谱使用数据波段选择法(BS)与主成分变换法(PCA)结合实地调查的郁闭度数据分别建模,评估了Hyperion 高光谱遥感数据定量估测森林郁闭度的能力。高云飞等[4]使用了38个现地调查的单元地块郁闭度数据,以SPOT 5影像为基础提取了各个波段的DN均值进行了回归、相关性分析,建立了不同波段组合来完成了对郁闭度反演。郑冬梅等[5]基于TM遥感影像和森林一类调查数据为基础,利用逐步回归、最小二乘回归、主分量回归和偏最小二乘回归5种方法构建了郁闭度定量估测模型,评估了哪些遥感因子与模型更适合郁闭度的定量估测。然而,以上研究利用遥感数据对郁闭度进行定量估测,都是基于现地调查数据结合与郁闭度相关性建立的经验模型,模型不确定性大,同时,模型精度受地形和遥感数据估测条件影响较大。
激光雷达(Light Detection and Ranging, LiDAR)区别于传统的森林因子测量方式,在森林三维结构的测量上具有独特的优势。激光雷达在20世纪80年代中期被应用于林业研究,随着激光雷达技术的发展,一些研究表明激光雷达对树冠发射的脉冲的响应函数不仅与高度有关,还与树冠郁闭度高度相关[6-7]。激光雷达点云数据包括来自地面和冠层的点云[8],森林郁闭度可以表示为不同回波点云的比值。为了与传统的郁闭度保持一致,往往在计算郁闭度时,设置一定的高度阈值分离冠层和非冠层点(灌木、草地),通常为1~2 m。Riaño等[9]研究者使用来自冠层的激光点云数量与总的激光点云数量之比计算了郁闭度。Korhonen等[10]设置高度阈值为1.3 m,使用第一次回波覆盖度指数(First echo Cover Index,FCI)对垂直覆盖度进行了估测,另外使用了最后一次回波覆盖度指数(Last echo Cover Index,LCI)与Solberg等[11]在2009年提出的SCI(Solberg’s Cover Index)指数分别对郁闭度进行了估测,得出第一次回波覆盖度指数精度更高,可能比实地快速调查的覆盖度更为接近真实值。Hopkinson等[12]设置1.3 m高度阈值,使用第一次回波覆盖度指数与所有回波覆盖度指数的方法估测郁闭度,得出第一次回波覆盖度指数精度高于所有回波。Ma等[13]利用机载雷达,机载影像,卫星影像对比不同数据源获取郁闭度的精度,指出LiDAR数据获得的郁闭度受算法的影响最小。同时在利用机载LiDAR数据获取郁闭度时设置2 m高度阈值分离冠层和非冠层点,得出第一次回波覆盖度指数获取的郁闭度精度高于所有回波覆盖度指数和冠层高度模型(CHM)方法获取的郁闭度。Tauri等[14]在位于爱沙尼亚浓密的混交林中采用获取的机载LIDAR点云数据开展覆盖度估测研究,得出设置1.3 m的高度阈值获取的覆盖度值与数字半球照片获取的覆盖度值具有较强的相关性。张瑞英等[15]使用机载LiDAR数据首先生成1 m分辨率的冠层高度模型(CHM),其次统计高度大于等于2 m的郁闭单元,最后计算30 m分辨率下的郁闭单元比例得到郁闭度。
随着激光雷达技术的发展,林业部门获取森林结构参数更加快速便捷。郁闭度对于评估森林质量,实施可持续发展是一个重要的参数指标。基于机载LiDAR点云数据获取森林郁闭度一直处于探索阶段,对比国内外研究,国外已有多位研究者对机载LiDAR点云数据获取森林郁闭度的方法进行对比研究,但国内鲜少有相关报道,同时,以往的研究多针对天然林,很少有研究者利用机载LiDAR点云数据在人工林中获取郁闭度进行不同方法的对比研究。因此,在综合前人研究的基础上,以广西壮族自治区获取的高峰林场机载LiDAR点云数据为基础,研究区内多以人工林为主,探讨了二维CHM和三维点云数据生成森林郁闭度的能力,并以实地调查的样地数据评价了两类方法生成郁闭度的精度,从技术方法和数据生成的精度进行了比较,为森林经营管理者基于LiDAR数据获取郁闭度提供方法参考,同时也为后续在人工林中开展研究提供一个案例参考。
2 研究区概况与数据
2.1 研究区概况
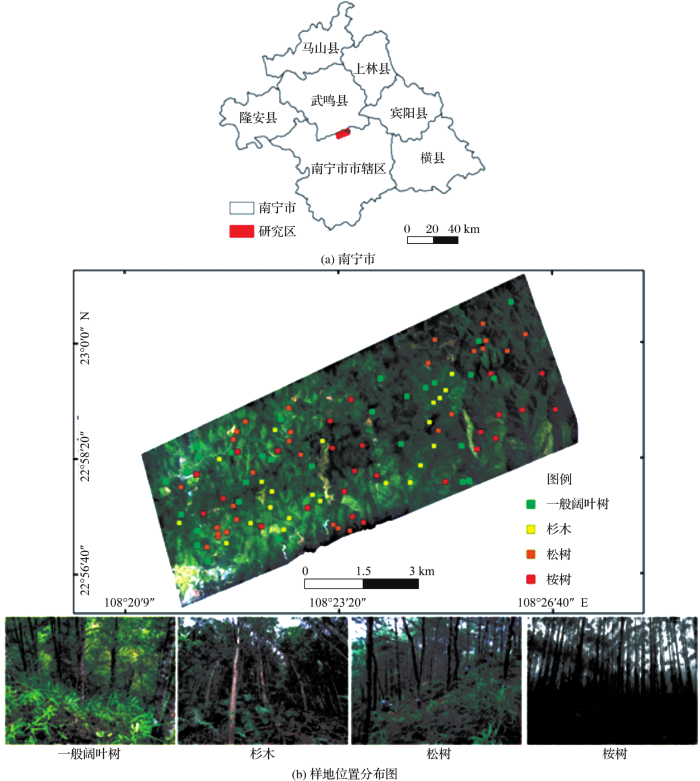
高峰林场试验区位于广西壮族自治区南宁市北部的国有高峰林场内,是一个呈东北至西南走向的近矩形区域,中心地理坐标为108°23′45″ E,22°58′33″ N。长度为11.2 km,宽度为4.2 km,面积约为4 770 hm2。高峰林场试验区包括高峰林场界碑、东升、延河3个分场,以及武鸣区、兴宁区、西乡塘区少量的林地。试验区海拔90~460 m,属低山地貌,一般坡度为24°~34° 之间,坡度大于24°的面积占研究区面积的75%。试验区森林覆盖率为90%以上,约95%为人工林,主要树种为尾叶桉(Eucalyptus urohpylla)、巨尾桉(Eucalyptus grandis×E. urohpylla)、马尾松(Pinus massoniana)、湿地松(Pinus elliottii)、杉木(Cunninghamia lanceolata)、八角(lllicium verum)、红椎(Castanopsis hystrix Miq.)、火力楠(Mytilaria macclurei)、米老排(Mytilaria laosensis)、厚荚相思(Acacia crassicarpa)。图1为高峰林场试验区位置示意图。
图1
2.2 机载LiDAR点云数据及样地数据
机载LiDAR点云数据获取时间为2016年9月,飞行覆盖范围108°20′9″~108°27′33″ E,23°0′28″~22°56′3″ N。本此飞行总覆盖面积约为55 km2,共飞行3驾次,每次约为5 h。使用R44直升机作为搭载激光雷达的飞行平台,激光雷达系统为奥地利RIEGL公司的VUX-1LR,该系统集激光测距,全球定位系统(GPS)和惯性导航系统(IMS)于一体。激光器工作波长为1 550 nm,激光束发散角为0.5 mrad,获得的平均点云密度约2点/m2。
将研究区森林划分为4个优势树种组,分别设置22块杉木样地、25块桉树样地(尾叶桉、巨尾桉)、29块松树样地(马尾松、湿地松、杂交松)、29块一般阔叶树样地(红椎、火力楠、米老排、八角、厚荚相思和天然杂木林),共计105块样地。样地数据获取。首先在GIS软件中,基于小班空间分布图上根据优势树种(组)分布按照相对均匀分布的原则随机布设样地,确定样地中心点的图面坐标,根据图面坐标采用手持双频差分GPS导航至样地中心。其次观察周围林分情况,若该中心四周30 m内林分均属于同一类型,则该中心即为样地中心,否则,移动该中心至合适位置。如果无论怎样移动样地中心,样地都无法只包含一个林分类型,可包含两个类型,但不能包含无林地。最后在样地中心西北方向20 m处附近,随机确定样地西北角点,用森林罗盘仪和激光测距仪测设样地边界,样地面积为30 m×30 m。样地分布位置及对应树种实地照片见图1(b)。在测设的样地内采用树冠投影法进行郁闭度调查。首先将样地内的树木进行定位,然后用皮尺从东西、南北两个方位测定各株树木的树冠边缘到树干的水平距离,按照一定比例将树冠投影标绘于图纸上,最后依据标绘的图纸计算树冠投影面积与林地面积的比值得出郁闭度。以此方法完成105块样地郁闭度调查。进一步对105块样地郁闭度统计,郁闭度范围为0.3~0.95,均值为0.63,从统计数据得出高峰林场试验区整体林分郁闭度较大,林木长势较好。
3 点云数据预处理
3.1 点云去噪
利用机载LiDAR点云数据生成郁闭度,前期需对原始点云数据进行预处理,预处理的第一步需要对点云进行去噪处理。由于设备精度、被测物体本身的特性以及环境因素的影响,传感器在采集数据的过程中会产生一些异常离群点,异常离群点包括高空噪点和低空噪点。去噪的目的是为了消除这些异常值,为后期郁闭度的提取奠定基础。本研究使用空间分布的去噪算法消除噪点,对每个点进行K邻域统计分析,计算该点到它K个邻近点的平均距离,假设计算出的平均距离服从高斯分布,依赖高斯分布得出该点和它K个邻近点的平均距离及标准差,则大于平均距离与N倍标准差的点判定为异常离群点。本研究邻近点设置为40,标准差倍数设置为1。
3.2 提取地面点和非地面点
LiDAR传感器在采集数据的过程中,点云数据主要包括地面点及地面以上的地物(植被、建筑等),滤波是基于去噪后的点云数据进行分离地面点和非地面点的操作。滤波对于森林参数的提取起到了至关重要的作用,滤波算法的好坏直接影响了郁闭度提取的精度。常见的滤波算法主要有形态学滤波、逐渐加密滤波算法、基于表面的方法和基于分割的方法[16],本研究使用不规则三角网(TIN)滤波算法。不规则三角网滤波算法主要的思想是使用一个粗放的尺度搜索最低点作为地面点,然后基于地面点建立TIN格网面,使用TIN格网面基于角度和距离逐步迭代其他三维点。满足阈值范围则分类为地面点,重新构建TIN格网面,依次反复,直至迭代完所有三维点,最终得到地面点,其他点为非地面点。最后根据文献[17]参数设置的原则,本研究通过量测研究区内建筑物,最大建筑物尺寸设置为26 m,此参数设置,避免窗口过小导致将房屋顶点滤波为地面点,因此设置的尺寸略大于实际建筑物尺寸。依据设置的最大建筑物尺寸,程序假定在每隔26 m范围尺度内有一个最低点落在地面,以此窗口完成初始地面点的选取。同时,结合研究区基本状况,考虑悬崖等地形特征,最大形坡度设置为88°,迭代角度设置为6°,迭代距离设置为1.6 m,完成研究区内地面点和非地面点的提取。
3.3 非地面点分类
通过滤波操作分离地面点和非地面点,非地面能进一步分类为植被、建筑物、道路等其他类别,以待后期对感兴趣地物类别处理,同时避免了植被类别中混杂有其他地物类别的存在,影响后期计算郁闭度的精度。本文研究区属于林区,因此借助LiDAR360软件平台,对非地面点进一步分类为植被、建筑物和其他类,为后期郁闭度的提取提供基础数据。
4 基于机载LiDAR点云数据郁闭度估测方法
利用机载LiDAR点云数据对郁闭度进估测的方法主要分为两类,一类是基于二维冠层高度模型(CHM)数据对郁闭度进行估测,另一类是直接由三维点云进行郁闭度的估测。本文使用两类方法进行了郁闭度估测对比实验,根据实地调查情况,样地大部分灌木草地都低于2 m,因此,高度阈值设置为2 m以达到分离冠和非冠层点的目的。在基于三维点云进行郁闭度估测时,研究采用两种方法:第一种方法,采用归一化后2 m以上高度植被点云与归一化后所有点云密度比值估测郁闭度之比计算林分郁闭度;第二种方法,采用归一化后2 m以上高度第一次回波植被点云与归一化后第一次回波所有点云密度之比计算林分郁闭度;最后使用实地调查的样地数据对两类方法进行郁闭度的精度评估。
4.1 基于二维CHM数据郁闭度估测方法
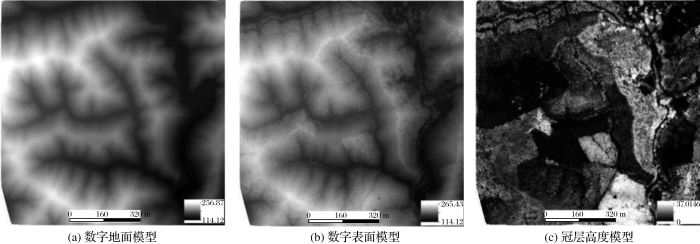
使用预处理后的机载LiDAR点云数据为基础,基于ArcGIS软件采用IDW插值方法,空值填充使用线性函数采用地面点数据生成DTM,所有植被第一次回波点云数据生成DSM,DSM和DTM做差得到CHM。得到的CHM本身的分辨率与基于CHM获取的郁闭度的分辨率不一致,在激光雷达点云数据获取的过程中,点云密度满足一定条件下,通过插值获取的CHM分辨率越高,得到的郁闭度精度越高,以上数据产品分辨率均为0.5 m×0.5 m。但由于点云预处理步骤中,每种点云滤波的方法所适应的场景不同,在环境较复杂的区域会影响点云滤波的效果,到目前还没有一种具有普适性的滤波方法。例如对于一些低矮的地物类型,它们和地面较为接近,容易将其分为地面点。另外,由于坡度的影响,越陡峭的地方坡度越大,越容易被误分为非地面点等[18]。以上因素的影响导致DTM、DSM数据产品会存在误差,进而导致CHM数据产品出现负值的现象。为了纠正CHM数据的负值问题,研究对DSM作了进一步处理,对DTM和DSM作栅格像元值的比较,如果DSM像元值小于DTM对应位置的像元值,则取DTM的像元值作为输入值,否则,仍保留DSM的像元值,最后得到更新错误值后的DSM。图2为研究区内生成部分CHM模型过程结果图。
图2
使用生成的0.5 m×0.5 m分辨率的CHM数据产品为基础,统计冠层郁闭单元。文章为了保持与传统郁闭度测量结果的一致性,使用2 m为高度阈值的界定范围。首先统计高度值大于等于2 m以上的像元为郁闭单元,反之,小于2 m的为非郁闭单元。其次为了得到林分尺度下的郁闭度,统计30 m×30 m分辨率下郁闭单元的数量,最后用郁闭单元的总数除以30 m×30 m林分区域下总像元数(共3 600个像素),得到郁闭度,即
4.2 基于三维点云数据郁闭度估测方法
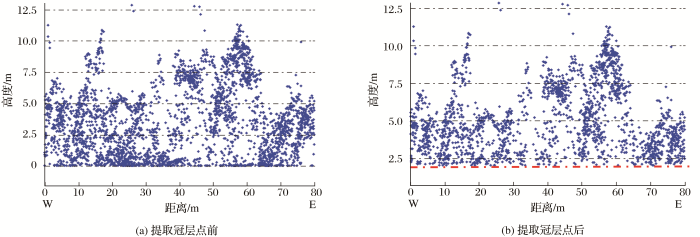
基于三维点云估测郁闭度,由于机载LiDAR在获取数据的过程中是以近似垂直的方向发射激光脉冲,能够准确的记录激光束及触及的地表物体,通过高度的判读即可知道是植被覆盖还是地面[19]。因此本文研究基于三维点云计算郁闭度主要分为4个步骤:①将预处理好的植被点云数据减去DTM,对点云数据进行归一化,消除地形的影响,图3为点云数据的归一化;②利用归一化后的点云数据对植被类别设置高度阈值,大于等于2 m以上的植被点认为是冠层点。对归一化后的点云数据进行冠层点提取,将高度大于等于2 m保留为冠层点云,小于2 m的点去除。图4为提取冠层点云前后的剖面图对比;③基于以上步骤,利用点云头文件信息记录的第几次回波数属性提取第一次回波的冠层点和第一次回波的所有点云;④计算冠层点云和所有点云的密度之比,第一次回波冠层点云和第一次回波所有点云的密度之比。同时为了保持与CHM获取的郁闭度结果对比,将分辨率设置为30 m×30 m,按照
图3
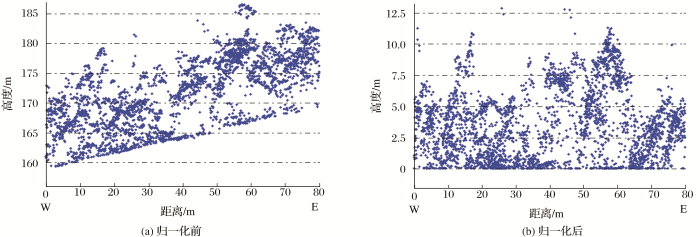
图4
4.3 精度评价
为了更好地评价两种方法获取郁闭度的能力,基于ArcGIS软件使用区域分析工具分别提取105块地面实测样地(30 m×30 m)对应的两类方法生成的林分郁闭度并作回归拟合。同时,对两类方法生成的林分郁闭度作回归拟合,三维点云生成的林分郁闭度作回归拟合,评价两种方法的误差。郁闭度精度比较方法使用相关系数R2和均方根误差RMSE,通过
5 结果与讨论
5.1 结果分析
图5
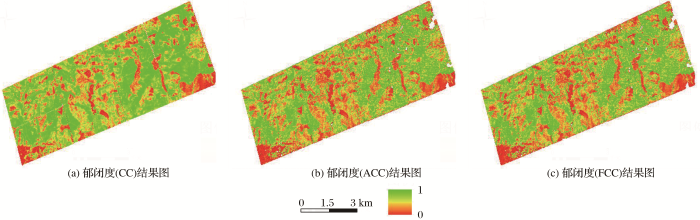
将基于二维冠层高度模型(CHM)生成的郁闭度(CC)和基于三维点云数据生成的郁闭度(ACC和FCC)分别与实地调查样地数据作回归拟合(图6(a)、6(b)、6(c)),冠层高度模型(CHM)生成的郁闭度(CC)分别与三维点云数据直接生成的郁闭度(ACC和FCC)作回归拟合(图6(d)和6(e))。三维点云数据直接生成的郁闭度冠层点密度与所有点密度之比(ACC)和第一次回波冠层点密度与第一次回波所有点密度之比(FCC)作回归拟合(图6(f))。图6(a)为冠层高度模型(CHM)生成的郁闭度与样地调查数据回归拟合结果图,相关性R2=0.388,均方根误差RMSE=0.17。图6(b)为冠层点密度与所有点密度之比生成的郁闭度(ACC)与样地调查数据回归拟合结果图,相关性R2=0.467,均方根误差RMSE=0.13。图6为第一次回波冠层点密度与第一次回波所有点密度之比生成的郁闭度(FCC)与样地调查数据回归拟合结果图,相关性R2=0.478,均方根误差RMSE=0.12。相关性最大为基于三维点云方法生成的郁闭度。说明估测结果与实测结果仍存在较大偏差,笔者认为主要原因是地面样地的郁闭度测量与实际存在较大偏差。虽然树冠投影方法测量郁闭度是相对准确的测定方法,但在测量中树冠投影大小仍需人为目视判定,主观性加大。同时,在林分中存在树冠重叠区域很难判定树冠的所属投影,也忽略了树冠内空隙对计算郁闭度的影响。基于三维点云数据方法直接生成的郁闭度(ACC和FCC)精度高于冠层高度模型(CHM)生成的郁闭度结果,根据前面的实验分析,在生成郁闭度过程中,基于三维点云数据直接生成郁闭度的过程中没有进行插值,冠层高度模型(CHM)生成郁闭度的过程中对数据进行了插值,插值在生成郁闭度的过程中带来误差影响,导致冠层高度模型(CHM)生成的郁闭度精度降低。
图6
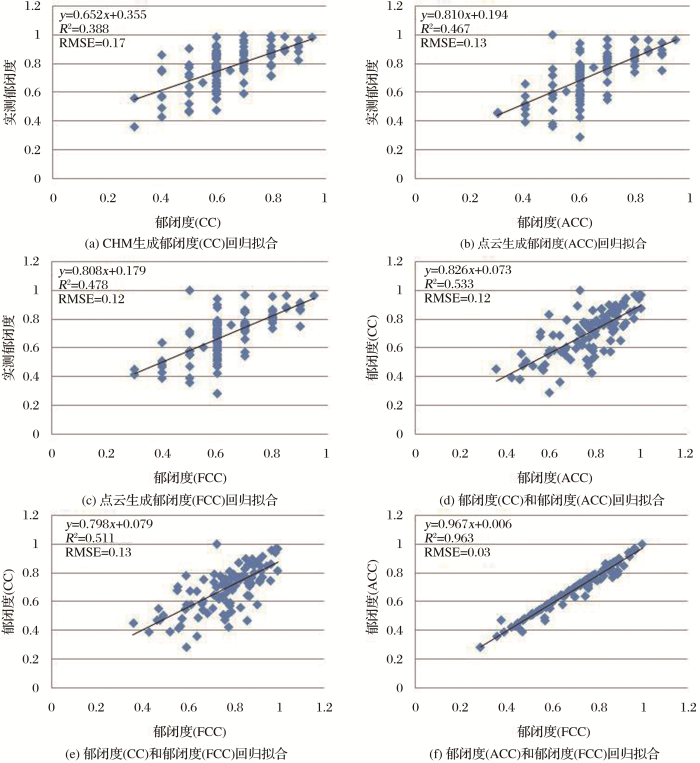
图6(d)和图6(e)为二维冠层高度模型(CHM)生成的郁闭度分别与三维点云生成的郁闭度(ACC和FCC)回归拟合结果图,冠层高度模型(CHM)生成的郁闭度和郁闭度(ACC)回归拟合相关性R2=0.533,均方根误差RMSE=0.12,二维冠层高度模型(CHM)生成的郁闭度和郁闭度(FCC)回归拟合相关性R2=0.511,均方根误差RMSE=0.13。图6(f)基于三维点云方法直接生成的郁闭度(ACC)和郁闭度(FCC)回归拟合相关性R2=0.963,均方根误差RMSE=0.03。基于二维冠层高度模型(CHM)的方法得到总体郁闭度的值大于基于三维点云数据生成的郁闭度的值,造成此结果的原因可能是由于在点云栅格化的过程中,一部分林冠间隙区域被插值为冠层区域,使得总体的林分郁闭度值有所提高。基于三维点云数据生成郁闭度的两种方法中,第一次回波冠层点密度与第一次回波所有点密度之比生成的郁闭度(FCC)精度优于冠层点密度与所有点密度之比生成的郁闭度(ACC),但两者相差不大,主要是由于第一次回波排除了冠层中间枝干叶回波点影响。
5.2 讨 论
(1)由于本次研究中检验样地郁闭度为调查人员目视判定树冠投影比例,郁闭度实测值可能存在较大误差,一定程度上影响了对估测结果的精度评价。若能采用更加科学的调查方式,例如利用冠层分析仪获取森林郁闭度,将更有利于对估测精度的准确评价。同时,在利用3种不同方法对郁闭度进行估测时,由于本次研究实测数据较少,没有按照树种类型的不同分组建模,导致3种方法估测精度的下降。
(2)郁闭度定义为从林地一点向上看,被树叶及树木枝干所遮挡的天空半球比例[20]。从郁闭度的定义中看出郁闭度为中心投影,在采集机载LiDAR点云数据过程中,从传感器发射脉冲收集回波信号,更符合郁闭度中心投影的定义,利用机载LiDAR点云数据计算出的郁闭度与定义相符。同时与郁闭度高度相关的另一概念为冠盖度,冠盖度是指森林地面被冠层的垂直投影所覆盖的比例[20]。因此冠盖度为垂直投影,与本文所采用的树冠投影法采集的郁闭度一致。虽然郁闭度与覆盖度为不同概念,但对于国内而言,在森林资源调查中,将郁闭度和冠盖度统称为郁闭度。正是由于概念定义的差异,使用树冠投影法获取实地调查的郁闭度数据来评价机载LiDAR点云数据获取的郁闭度时会产生较大的误差,导致通过二维CHM方法和三维点云的3种方法获取郁闭度与实地调查数据建模,精度(R2)都低于50%。但相较于Ma等[13]的研究,本文使用3种方法获取的郁闭度精度都有所提高,可能是本研究的研究区多位于人工林,相比天然林更为单一。同时,研究区地形有所差异,Ma等[13]的研究区更为复杂,地形高差起伏较大,会给分离地面和非地面点过程中带来困难,导致精度下降。
(3)由于森林中地形复杂多变,根据实际地形选用合适的滤波方法分类地面点是后期森林郁闭度估测的关键。当前滤波算法研究中,很难找到普适性的滤波算法科学的分类出地面点。在提取地面点过程中,采用滤波算法得到的地面点插值生成数字地面模型(DTM)对非地面点第一次回波插值生成的数字表面模型(DSM)像元对比迭代的方法有利于减少滤波算法对二维冠层高度模型(CHM)方法估测郁闭度带来的影响。
(4)基于三维点云数据直接生成郁闭度的第一种方法直接利用高度阈值提取了2 m以上的点云作为冠层点。在提取的这一部分冠层点中,有一部分为非冠层点,如树冠内部树叶间或枝干间的回波点,对郁闭度估测带来了误差影响。第二种方法在第一种方法的基础上提取了第一次冠层回波点和第一次所有回波点,排除了树冠间树叶和树干之间的回波点,使郁闭度估测更加科学。研究结果证明了这一点,同时根据Ma等[13]的研究也指出第一次回波的方法相较于其他两种方法更适合郁闭度估测。
(5)不同的滤波方法适合于不同的地面情况,对同一研究区使用多种不同的滤波方法组合有利于地面点分类的准确性;虽然激光传感器近似垂直的发射激光脉冲,但在采集数据的过程中仍有一定的扫描角度对郁闭度的估测带来一定的影响;利用激光雷达其他信息、例如强度信息对郁闭度进行估测;利用LiDAR数据生成不同尺度的林分郁闭度产品与其他光学影像结合,作为反演其他森林参数的输入量提高森林参数的获取精度等诸多研究点有待后续进一步深入研究。
6 结 论
研究以机载LiDAR点云数据为数据源,通过两类不同估测方法对高峰林场试验区森林郁闭度进行了估测研究,采用实测样地郁闭度对估测结果进行了精度评价。研究结果表明,基于二维冠层高度模型(CHM)估测的郁闭度与实测数据之间R2=0.388,RMSE=0.17;基于三维点云数据直接生成郁闭度的2种方法中:第一种方法(冠层点密度与所有点密度之比) R2=0.467,RMSE=0.13,第二种方法(第一次回波冠层点密度与第一次回波所有点密度之比)R2=0.478,RMSE=0.12;基于三维点云数据直接生成郁闭度的方法优于基于冠层高度模型(CHM)方法,基于三维点云数据直接生成郁闭度的2种方法中,第二种方法优于第一种方法。
参考文献
Prospect and Discussion on Measuring Methods of Forest Canopy Density
[J].
森林郁闭度测定方法探讨与展望
[J].
Review of Research and Application of Forest Canopy Closure and Its Measuring Methods
[J].
Estimating Forest Crown Closure Using Hyperion Hyper Spectral Data
[J].
Hyperion高光谱数据森林郁闭度定量估测研究
[J].
Study on Canopy Density Rrtrieval Method from SPOT5
[J].高云飞
,基于SPOT5影像的郁闭度反演方法
[J].
Remote Sensing Estimation of Forest Canopy Closure in Forests of Three Gorges Reservoir Region
[J],郑冬梅
,三峡库区森林郁闭度的遥感定量估测
[J].
Capturing Tree Crown Formation Through Implicit Surface Reconstruction Using Airborne LiDAR Data
[J].
Estimation of Forest Aboveground Biomass by Integrating ICESat/GLAS Waveform and TM Data
[D].汤旭光. 基于激光雷达与多光谱遥感数据的森林地上生物量反演研究
[D].
Estimating Plot-level Tree Heights with LiDAR: Local Filtering with a Canopy-height based Variable Window Size
[J].
Modeling Airborne Laser Scanning Data for The Spatial Generation of Critical Forest Parameters in Fire Behavior Modeling
[J].
Airborne Discrete-return LiDAR Data in The Estimation of Vertical Canopy Cover,Angular Canopy Closure and Leaf Area Index
[J].
Mapping LAI in a Norway Spruce Forest Using Airborne Laser Scanning
[J].
Testing LiDAR Models of Fractional Cover Across Multiple Forest Ecozones
[J].
Comparison of Canopy Cover Estimations from Airborne LiDAR, Aerial Imagery, and Satellite Imagery
[J].
Estimation of Canopy Cover in Dense Mixed-species Forests Using Airborne LiDAR Data
[J].
Canopy Closure Estimation in a Temperate Forest Using Airborne LiDAR and Landsat ETM+Data
[J].
结合机载LiDAR和Landsat ETM+数据的温带森林郁闭度估测
[J].
The Analysis and Comparison of Airborne LiDAR Point Cloud Filter Algorithms
[J].
机载激光雷达点云滤波算法分析与比较
[J].
Forest Mean Height Extraction based on The Low-density Airborne LiDAR and CCD Data
[J].
基于低密度机载LiDAR和CCD数据的林分平均高提取
[J].
LiDAR Principles, Processing and Applications in Forest Ecology
[M].激光雷达森林生态应用—理论、方法及实例
[M].
Estimating Canopy Structure of Douglas-fir Forest Stands from Discrete-return LiDAR
[J].
Assessing Forest Canopies and Understorey Illumination: Canopy Closure, Canopy Cover and Other Measures
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}