1 引 言
调频连续波体制逆合成孔径雷达发射线性调频连续波信号,具有时宽大,峰值功率低的特点,降低了对发射端功率放大器的要求[1 ] ,其不仅具有传统雷达的高分辨率,全天候、全天时监测的优势,又具有体积小,系统结构简单,造价低的特点,在实际成像监测中有着广泛的应用。
由于发射信号带宽以及合成孔径长度的有限性,逆合成孔径雷达对理想点目标的后向散射中心成像为二维sinc函数[2 ] ,而sinc函数的旁瓣值较高,所以存在强目标的较强的旁瓣会淹没附近的弱目标,造成成像的模糊,因此有效地抑制旁瓣非常重要。加窗加权是较为常用的旁瓣抑制方法,但其在减弱旁瓣幅度的同时会使主瓣展宽造成图像分辨率的下降[3 ] 。
据此引进用于改进天文图像质量的CLEAN算法,CLEAN算法于1974年由Hogbom[5 ] 提出用于提高射电天文中综合孔径成像的质量;随后,Schwarz于1978年对CLEAN算法做了深入的数学理论方面的研究[5 ] ,研究表明CLEAN算法不仅能够抑制旁瓣,而且具有很高的信噪比。CLEAN算法自诞生至今,演变出了很多扩展算法,针对传统CLEAN算法在迭代过程中可能会选择较强的“假点”,酒明远[6 ] 提出了基于树形搜索算法的S-CLEAN算法;在图像处理中针对当旁瓣干扰是主要原因时,演变出了I-CLEAN算法[7 ] ;针对当处理图像为各种不同大小尺度的目标组成时,发明的多尺度CLEAN(MSC-CLEAN)算法[8 ] 等。CLEAN算法是一种消卷积过程,用于消除因空间频率域覆盖的不完整而产生的影响[9 ] ,其通过逐步迭代消卷积识别主瓣,消减旁瓣,重建真实目标的位置幅度信息,能够有效地减弱旁瓣对成像结果的影响。然而在实际工程中,系统存在的误差以及非合作运动目标的非平稳非匀速运动会使目标等效后向散射中心成像的sinc函数主瓣扭曲、旁瓣失真,造成了CLEAN算法“脏束”选择的困难,限制了CLEAN算法在实际工程中的应用。
针对系统本身或实际环境造成的旁瓣失真,先采用加窗加权的方法进行旁瓣抑制,减弱了不规则旁瓣对后续CLEAN算法的影响;针对主瓣扭曲失真及加窗带来的分辨率的下降,改进了传统的CLEAN算法中的“脏束”、“清洁波束”,提高了目标识别能力及算法的适用性。通过对实际数据的处理,验证了该方法的有效性。
2 FMCW ISAR回波信号模型
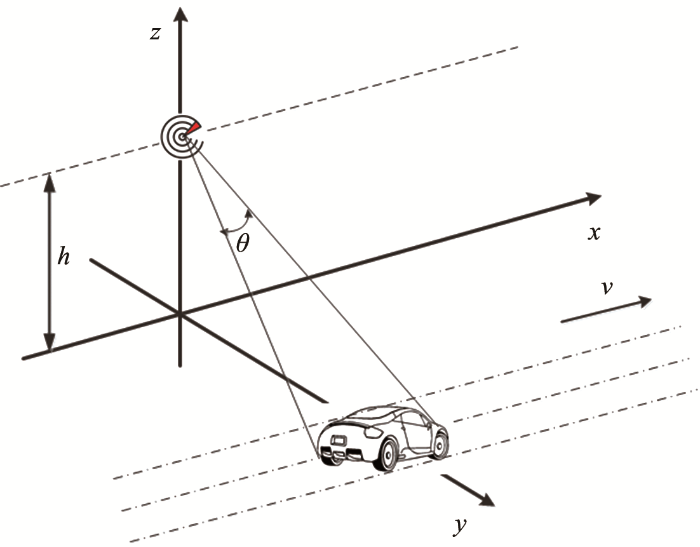
在雷达成像中,目标被电磁波照射后,由于目标各部分对入射电磁波的角度的不同以及二次、多次散射等的原因,目标上会有一些对电磁波散射相对较强的位置,这些集中散射能量的位置称为散射中心[10 ] 。在实际雷达成像中,复杂目标的电磁散射可以看成是一系列强散射中心的集合。
图1 为FMCW ISAR成像的模型图,雷达所在的高度为h θ v x
R 0 = h 2 + y 2
图1
图1
ISAR回波信号模型
Fig.1
The model of ISAR echo signals
相较于脉冲体制的雷达,FMCW雷达发射线性调频连续波信号占空比大,时长较长,其瞬时斜距并进行泰勒级数的展开的近似表达式如下:
R ( t x , t ) = R 0 2 + v 2 ( t x + t ) 2 ≈ R 0 2 + v 2 t x 2 + v 2 t x R 0 2 + v 2 t 2 t
其中:R ( t x ) = R 0 2 + v 2 t x 2 t x t
Δ f = - 2 λ d R ( t x , t ) d t = - 2 λ v 2 t x R 0 2 + v 2 t x 2 = f x
其中:f x [11 ] ,需要进行补偿。
逆合成孔径雷达接收的信号经过去斜得到完整的表达式如下[12 ] :
s ( t , t x ) = A e x p ( - j 4 π R λ ) e x p [ - j 4 π k c ( t - 2 R r e f c ) ( R - R r e f ) ] ⋅ e x p ( j 2 π f d t ) e x p [ j 4 π k c 2 ( R - R r e f ) 2 ]
其中:A t t x R r e f f d T p [13 ] 。
其进行RVP校正并经过RD成像算法后得到最终信号的表现形式为:
s ( t x , f ) = A 1 s i n c ( π B x t x ) s i n c [ π T p ( f - 2 k c ( R 0 - R r e f ) ) ]
其中:A 1 B x
3 时域加窗原理
在实际的成像处理中,由于发射机发射信号带宽的有限性以及计算机在进行快速傅里叶变换(FFT)时,容易出现频谱泄漏和栅栏效应[14 ] ,为了抑制频谱泄漏和栅栏效应对频谱分析的影响,一般采用在时域加窗进行处理。
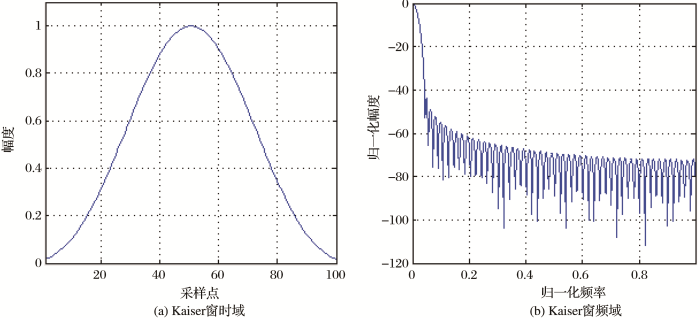
常用的窗函数有汉宁(Hanning)窗、汉明(hamming)窗、布莱克曼(Blackman)窗、凯撒(Kaiser)窗等。矩形窗具有主瓣宽度最窄,但是旁瓣电平较高,海明窗和汉宁窗具有相似的主瓣宽度,但汉宁窗旁瓣峰值略低,布莱克曼窗具有最低的旁瓣峰值,但是主瓣宽度最宽,而凯撒(Kaiser)窗通过调整相关参数,能够自由定义主瓣高度与旁瓣宽度之间的比例,具有能够根据实际情况灵活调整参数以达到最佳的旁瓣抑制的效果。
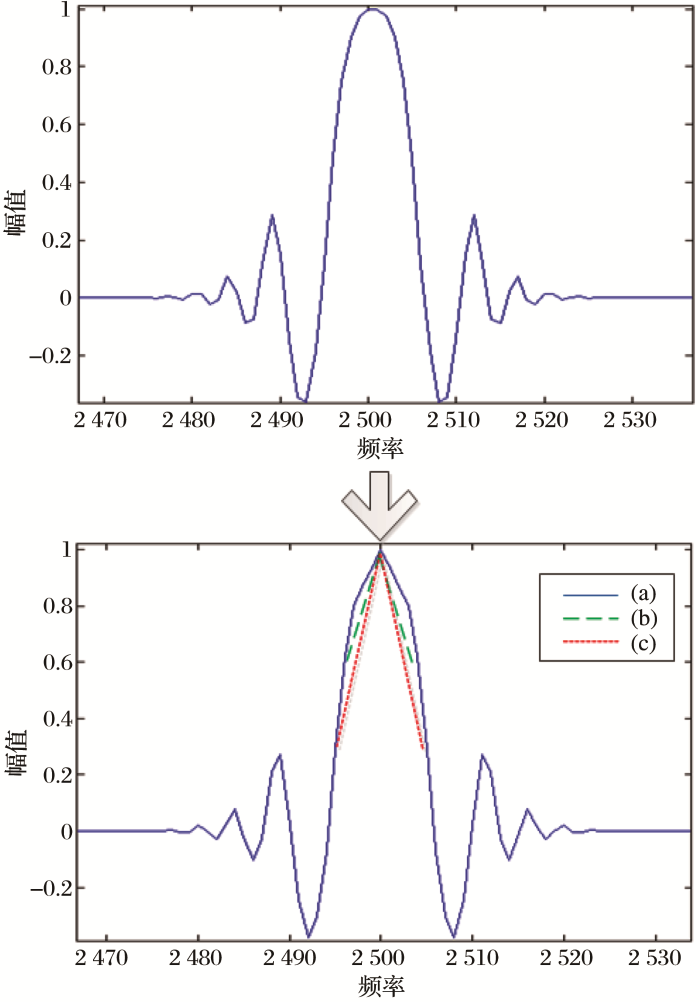
对窗函数的选择,主要是考虑主瓣越窄越好,旁瓣越低越好,旁瓣衰减速率越快越好,然而,同时满足上述条件的窗函数是不存在的[15 ] ,故在实际分析中,往往是以上因素进行妥协折中;本文选择Kaiser窗(β = 6 图2 所示。
图2
图2
Kaiser窗的时域频域特性
Fig.2
The characteristics of the Kaiser window
4 CLEAN算法的基本原理
在ISAR成像模型中,理想点目标的后向散射中心模型由式(4)可知为二维sinc函数,可见ISAR成像将受到sinc函数旁瓣叠加问题的影响,不妨将模型中的二维sinc函数称为“脏束”(dirty beam),将只含有主瓣的点扩散函数称为“清洁波束”(clean beam)[16 ] ,一般选择二维高斯函数:
f ( t x , f ) = A i ⋅ e x p ( - ( ( t x - t i ) 2 2 σ x 2 + ( f - f i ) 2 2 σ y 2 ) )
其中:A i ( t i , f i ) σ x σ y
算法通过对“脏”图进行循环消卷积得到去除旁瓣影响的真实场景散射点。CLEAN算法的具体实现步骤为:
(1)在经过RD算法处理得到的雷达图像∑ s ( t x , f ) ( t x i m a x , f i m a x ) A i m a x
A i m a x s i n c ( π B x t x i m a x ) s i n c [ π T p ( f i m a x - 2 k c ( R 0 - R r e f ) ) ]
(3)选定循环比例因子r = 1 / 256
s i = s i - 1 - γ ⋅ A i m a x s i n c ( π B x t x i m a x ) ⋅ s i n c [ π T p ( f i m a x - 2 k c ( R 0 - R r e f ) ) ]
(4)比较剩余部分图像的质量,即:P i = ∑ s i m * ( s i m ) * s i m
(5)循环步骤(1)~(4),直到得到的图像接近背景噪声或达到某一阈值则终止循环。
(6)将循环中得到的最大值点的集合∑ ( t x i m a x , f i m a x ) f ( t x , f )
∑ A i m a x ⋅ e x p ( - ( ( t x - t x i m a x ) 2 2 σ x 2 + ( f - f i m a x ) 2 2 σ y 2 ) )
5 旁瓣抑制方法仿真对比
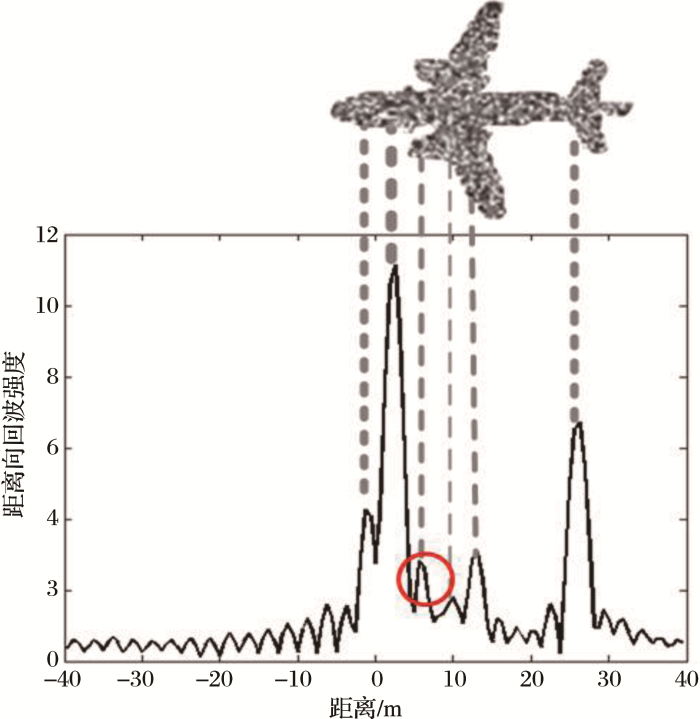
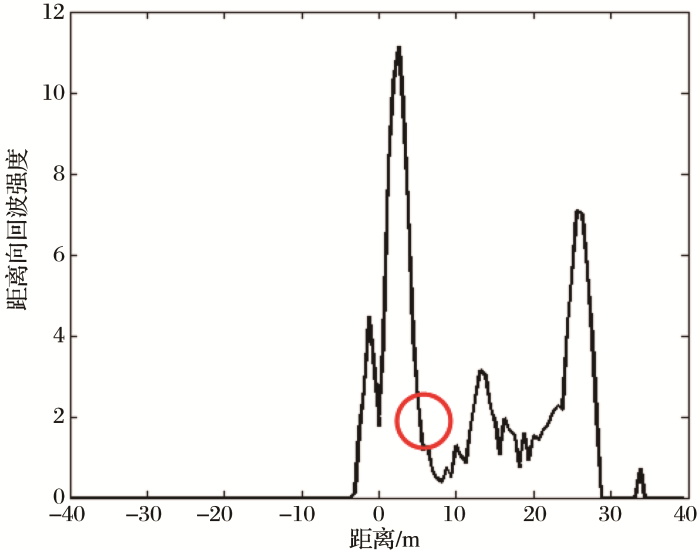
为了验证加窗与CLEAN算法联合成像处理算法对检测弱小目标的有效性,用Matlab对小飞机距离向回波进行一维仿真实验验证。仿真参数设置如下:雷达发射信号的中心频率为36.05 GHz,发射信号的带宽为300 MHz,雷达的距离向观测角度为10°,方位向观测角度为4°,距离向采样128个点,并加入了随机的高斯白噪声,雷达观测时采用正侧视模式。分别在-1.25、2.5、5.6、10、13.1和26 m处设置5个散射点。飞机的距离向一维回波仿真如图3 所示。
图3
图3
小飞机旁瓣抑制仿真
Fig.3
The simulation of the Small aircraft
由图3 可以看出,小飞机的主要散射位置有峰值存在,图中的第3个散射点(起落架)由于散射强度较弱及周围强目标旁瓣以及周围环境噪声相对较强,极易被第二个散射点淹没,与背景噪声混叠。
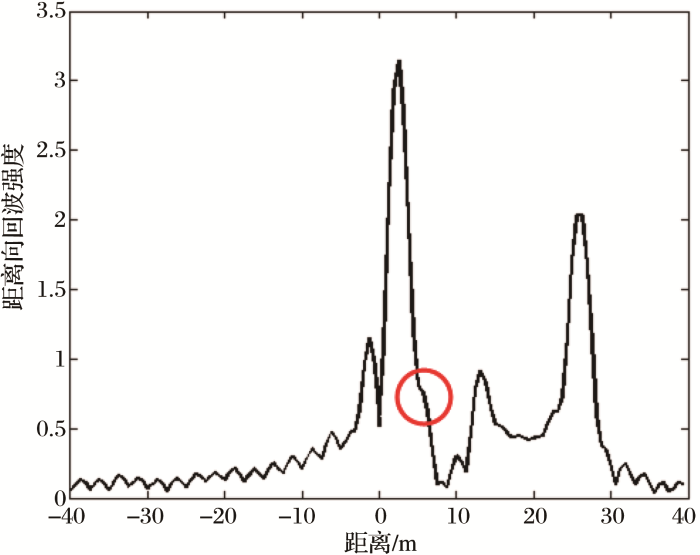
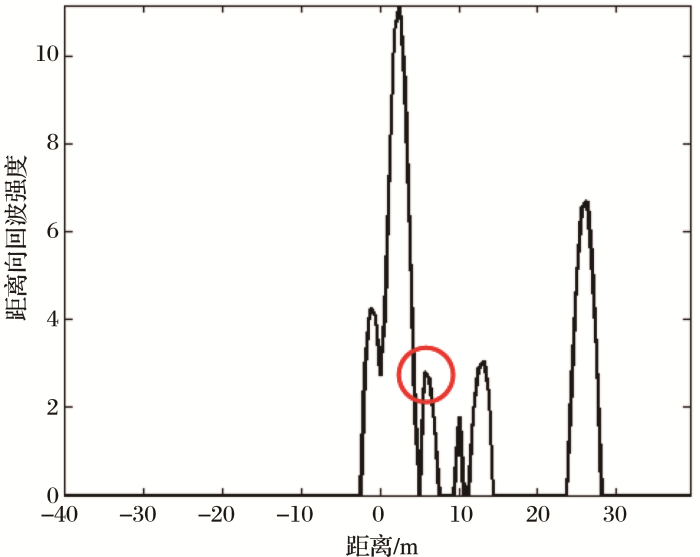
采用传统的时域加窗的方法对旁瓣进行抑制,由于Kaiser窗能够根据各种实验场景灵活调整参数,达到最佳的旁瓣抑制效果,选择Kaiser(β = 6 图4 所示。可见,加窗对于旁瓣的抑制有着一定的效果,但其在抑制旁瓣的同时,加宽了主瓣的宽度(半峰值处,约展宽5.2 %
图4
图4
时域加窗后的仿真图
Fig.4
The simulation of the Small aircraft with windowed time domain
加窗对旁瓣抑制有着一定的效果,但旁瓣依旧存在,同时带来主瓣展宽及峰值下降的问题。故利用CLEAN算法对数据进行处理,效果如图5 所示。
图5
图5
应用CLEAN算法的仿真图
Fig.5
The simulation of the Small aircraft with CLEAN algorithm
图5 为仅进行CLEAN算法后的效果图,可见CLEAN算法在旁瓣抑制的同时没有加宽主瓣。但由于仿真中加入的强的背景噪声以及第二个散射点设置时为非理想sinc函数对CLEAN算法识别目标造成干扰,导致CLEAN算法没有准确的检测出来第三个散射点。
图6 为回波数据先进行加kaiser(β = 6
图6
图6
加窗与CLEAN算法联合处理的效果图
Fig.6
The simulation of the Small aircraft with windowed time domain and CLEAN algorithm
6 实测数据处理对比
为了验证本文提出的方法对于实际工程中数据处理的效果,采用FMCW ISAR系统对运动汽车进行实测成像,实验场景如图7 所示。
图7
图7
实验场景图
Fig.7
The scene of experiment
系统的详细参数如表1 所示。首先对测得的数据进行RD算法处理[17 ] ,得到的雷达原始成像。由公式(4)推导可知,理想点目标回波经过去斜压缩处理,得到的点目标成像为二维sinc函数,然而针对不同场景的实际情况,会存在观测角度的不同,目标非平稳运动等的影响,导致回波的二维sinc函数主瓣扭曲变形;据此,将对CLEAN算法中“脏束”的主瓣进行适当的尖锐化处理,以加强对目标的识别能力及对环境的适应性,如图8 所示,成像结果的对比如图9 所示。
图8
图8
CLEAN算法“脏束”的尖锐化处理
Fig.8
The sharpening of the dirty beam in the CLEAN algorithm
图9
图9
成像结果的对比
Fig.9
The comparison of results
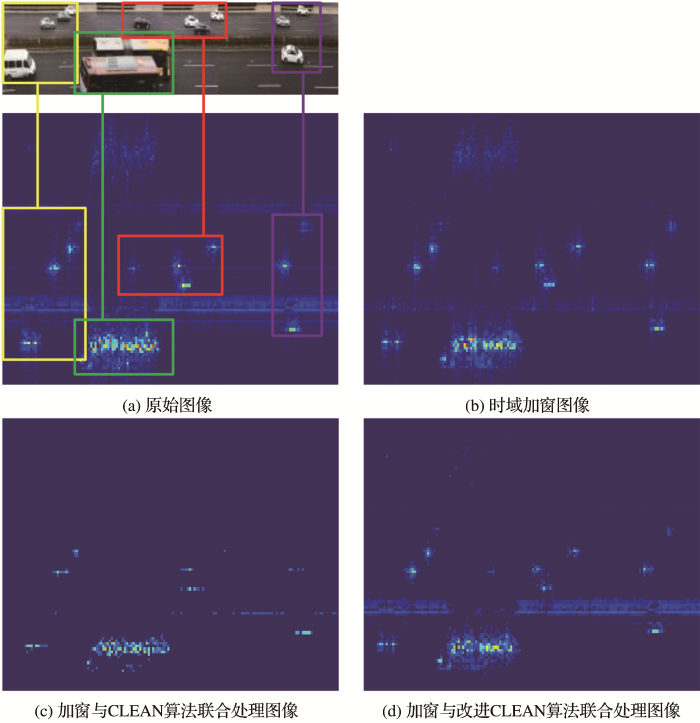
图9 (a)为经过RD算法处理过的原始图像,可见RD算法处理过的雷达图像与光学图像得到了良好的对应。图9 (b)为经过时域加窗后的图像,可见加窗对旁瓣有一定的抑制作用。图9 (c)为经过时域加窗并采用“脏束”为图8 中(a)的CLEAN算法处理后得到的结果,可见其消除了旁瓣的影响,但图像信息有所缺失,原因是实际的成像场景复杂性导致的主瓣扭曲,变窄及目标旁瓣失真,当采用理想sinc函数为“脏束”进行相减的时候,可能会一次减去多个点目标响应以及无法识别强目标旁瓣下的弱小目标从而导致信息的丢失。图9 (d)为进行时域加窗并采用“脏束”为图8 中(c)的CLEAN算法处理后得到的结果,可见其通过对“脏束”的修改,在抑制旁瓣的同时,有效重建了目标的细节信息。通过对比可知,成像质量得到了显著的提高。
运用图像的平均均方误差(RMSE)和峰值信噪比(PSNR)衡量重建图像的质量。其定义分别为:
R M S E = 1 m n ∑ i = 0 m - 1 ∑ j = 0 n - 1 I ( i , j ) - I ' ( i , j ) 2
P S N R = 10 l o g 10 A 2 1 m n ∑ 0 m ∑ 0 n I ( i , j ) - I ' ( i , j )
其中:I ( i , j ) I ' ( i , j ) A 表2 所示。
平均均方误差反映的是当前图像和源图像在每一个像素点之间的方差,越小代表着重建图像准确度越高;峰值信噪比表示信号的最大可能功率和影响它的表示破坏性噪声功率的比值,越大代表着与原图越接近。
如表所示,经过时域加窗,其只是降低旁瓣,所以可以认为对重建图像的准确性没有太大的影响;而经过Clean算法,导致的图像信息的缺失,平均均方误差远大于加窗时的误差,峰值信噪比也小于加窗的信噪比,经过改进的clean算法,平均均方误差和峰值信噪比均优于了时域加窗时的水平,接近时域加窗的效果参数,说明了改进的联合处理算法准确的重建了图像的细节信息,优化了成像效果。其对旁瓣的抑制和对信噪比的提高如图10 所示。
图10
图10
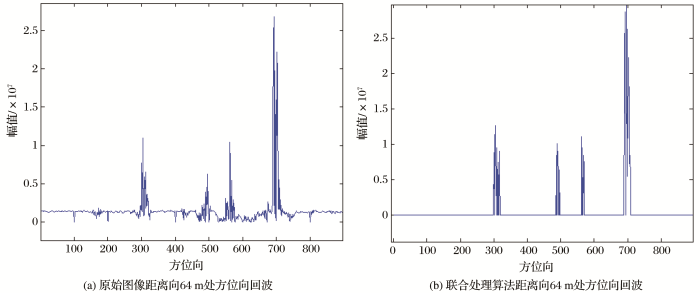
距离向64处剖面对比
Fig.10
The comparison of the sections in the distance of 64
图10 为原始图像与经过联合处理算法的图像在距离向64 m处的方位向回波剖面图;可见在方位向,经过改进的联合处理算法,在不降低图像分辨率的情况下,消除了旁瓣,滤除了噪声,达到了预期的效果。
7 结 论
针对ISAR观测过程中非合作目标非平稳运动引起的点目标回波可能会存在旁瓣失真并掩盖弱小目标等导致的传统CLEAN算法难以进行有效处理的问题,本文采用了时域加窗加权修正旁瓣与CLEAN算法联合对数据进行处理的方法;针对实际情况造成的主瓣扭曲失真的问题,改进了CLEAN算法中的“脏束”,使其对实际场景具有更好的目标辨识能力以及适应能力,通过经过处理后的图像之间的对比,验证了本文提出的方法的有效性。
参考文献
View Option
[1]
Jiang Zhihong Zhao Yi Huang Fukan Development of FMCW ISAR
[J]. Modern Radar , 2008 , 30 (2 ): 20 -24 .
[本文引用: 1]
江志红 ,赵懿 ,皇甫堪 调频连续波SAR的研究进展
[J]. 现代雷达 ,2008 ,30 (2 ):20 -24 .
[本文引用: 1]
[2]
Wang Zhijin Research on Radar Imaging Algorithm
[D]. Xi’an : Xidian University of Electronic Technology , 2012 : 20 -25 .
[本文引用: 1]
王志金 雷达成像算法研究
[D]. 西安 :西安电子科技大学 ,2012 : 20 -25 .
[本文引用: 1]
[3]
Oppenheim A V Schafer R W Discretetime Signal Processing [M]. 2nd ed . USA : Prentice Hall ,1999 .
[本文引用: 1]
[4]
Zeng Bo Tang Qiu Boyuan Qing Spectral Analysis Method based on Improved FFT by Nuttall Self Convolution Window
[J]. Journal of Electrotechnics , 2014 , 29 (7 ): 60 -62 .
曾博 ,唐求 ,卿柏元 基于Nuttall自卷积窗的改进FFT谱分析方法
[J]. 电工技术学报 , 2014 , 29 (7 ):60 -62 .
[5]
Hogbom J A Aperture Synthesis with a Nonegular Distribution of Interferometer Baselines
[J]. Astron. Astrophys , 1974 , 15 (2 ): 417 -426 .
[本文引用: 2]
[6]
Mingyuan Jiu Research on Micro-Doppler Phenomena and CLEAN Technology in ISARImaging
[D]. Harbin : Harbin Institute of Technology , 2010 : 20 -25 .
[本文引用: 1]
酒明远 ISAR成像中微多普勒现象及CLEAN技术研究
[D]. 哈尔滨 : 哈尔滨工业大学 , 2010 : 20 -25 .
[本文引用: 1]
[7]
Bose R Freedman Avraham Steinberg B. D. Sequence CLEAN: A Modified Deconvolution Technique for Microwave Images of Contiguous Targets
[J]. IEEE Transactions on Aerospace and Electronic Systems , 2002 , 38 (1 ): 89 -97 .
[本文引用: 1]
[8]
Li Linmao Research on CLEAN Algorithm in Reconstructed Image
[D]. Shanghai : Shanghai University of Applied Sciences , 2017 : 2 -4 .
[本文引用: 1]
李林茂 重构图像中CLEAN算法的研究
[D]. 上海 : 上海应用技术大学 , 2017 : 2 -4 .
[本文引用: 1]
[9]
He Yuntao Jiang Yuesong Zhong Yu Application of CLEAN Algorithm in Airborne Millimeter Wave Synthetic Aperture Imaging
[J]. Journal of Electronics and Information , 2007 , 29 (7 ): 1757 -1758 .
[本文引用: 1]
何云涛 , 江月松 , 钟宇 CLEAN算法在机载毫米波综合孔径成像中的应用
[J]. 电子与信息学报 ,2007 ,29 (7 ): 1757 -1758 .
[本文引用: 1]
[10]
Yang Xinfeng Zhang Jinna Teng Shuhua Estimation of Scattering Center of Random Frequency Conversion Radar Using Compressed Sensing
[J]. Infrared and Laser Engineering ,2016 , 45 (5 ): 1 -3 .
[本文引用: 1]
杨新峰 , 张金娜 , 滕书华 利用压缩感知实现随机变频雷达散射中心估计
[J]. 红外与激光工程 , 2016 , 45 (5 ): 1 -3 .
[本文引用: 1]
[11]
Meta A Hoogeboom P Time Analysis and Processing of FMCW SAR Signals
[C]∥ Proc. IRS . 2003 : 263 -268 .
[本文引用: 1]
[12]
Cai Yongjun Zhang Xiangkun Jiang Jingshan Design and Imaging of Millimeter Wave FMCW SAR System
[J]. Modern Radar , 2016 ,38 (2 ): 4 -5 .
[本文引用: 1]
蔡永俊 ,张祥坤 ,姜景山 毫米波FMCW SAR系统设计与成像研究
[J]. 现代雷达 ,2016 , 38 (2 ): 4 -5 .
[本文引用: 1]
[13]
Liang Yi Wang Hongxian Xing Mengdao Analysis and Imaging of Frequency Modulated Continuous Wave SAR Signals
[J]. Journal of Electronics and Information , 2008 , 3 (5 ): 1017 -1020 .
[本文引用: 1]
梁毅 , 王虹现 , 刑孟道 调频连续波SAR信号分析与成像研究
[J]. 电子与信息学报 , 2008 , 3 (5 ): 1017 -1020 .
[本文引用: 1]
[14]
Yang R Xue H A Novel Algorithm for Accurate Frequency Measurement Using Transformed Conse Cutive Points of DFT
[J]. IEEE Transactions on Power Systems , 2008 , 23 (3 ): 1057 -1062 .
[本文引用: 1]
[15]
Schwarz U J Mathematical-statistical Description of the Iterative Beam Removing Technique(Method CLEAN)
[J]. Astron Astrophys , 1978 ,65 (2 ): 345 –356 .
[本文引用: 1]
[16]
Dwarakanath K S Deshpande A A Shankar N U A Modified Algorithm for Cleaning Wide-field Maps with Extended Structures
[J]. Journal of Astrophysics and Astronomy , 1990 , 11 (3 ): 311 -322 .
[本文引用: 1]
[17]
Ausherman D A Kozma A walker J L et al Development in Radar Imaging
[J].IEEE Transactions on Aerospace and Electronic Systems , 1984 , 4 : 363 -398 .
[本文引用: 1]
调频连续波SAR的研究进展
1
2008
... 调频连续波体制逆合成孔径雷达发射线性调频连续波信号,具有时宽大,峰值功率低的特点,降低了对发射端功率放大器的要求[1 ] ,其不仅具有传统雷达的高分辨率,全天候、全天时监测的优势,又具有体积小,系统结构简单,造价低的特点,在实际成像监测中有着广泛的应用. ...
调频连续波SAR的研究进展
1
2008
... 调频连续波体制逆合成孔径雷达发射线性调频连续波信号,具有时宽大,峰值功率低的特点,降低了对发射端功率放大器的要求[1 ] ,其不仅具有传统雷达的高分辨率,全天候、全天时监测的优势,又具有体积小,系统结构简单,造价低的特点,在实际成像监测中有着广泛的应用. ...
雷达成像算法研究
1
2012
... 由于发射信号带宽以及合成孔径长度的有限性,逆合成孔径雷达对理想点目标的后向散射中心成像为二维sinc函数[2 ] ,而sinc函数的旁瓣值较高,所以存在强目标的较强的旁瓣会淹没附近的弱目标,造成成像的模糊,因此有效地抑制旁瓣非常重要.加窗加权是较为常用的旁瓣抑制方法,但其在减弱旁瓣幅度的同时会使主瓣展宽造成图像分辨率的下降[3 ] . ...
雷达成像算法研究
1
2012
... 由于发射信号带宽以及合成孔径长度的有限性,逆合成孔径雷达对理想点目标的后向散射中心成像为二维sinc函数[2 ] ,而sinc函数的旁瓣值较高,所以存在强目标的较强的旁瓣会淹没附近的弱目标,造成成像的模糊,因此有效地抑制旁瓣非常重要.加窗加权是较为常用的旁瓣抑制方法,但其在减弱旁瓣幅度的同时会使主瓣展宽造成图像分辨率的下降[3 ] . ...
1
1999
... 由于发射信号带宽以及合成孔径长度的有限性,逆合成孔径雷达对理想点目标的后向散射中心成像为二维sinc函数[2 ] ,而sinc函数的旁瓣值较高,所以存在强目标的较强的旁瓣会淹没附近的弱目标,造成成像的模糊,因此有效地抑制旁瓣非常重要.加窗加权是较为常用的旁瓣抑制方法,但其在减弱旁瓣幅度的同时会使主瓣展宽造成图像分辨率的下降[3 ] . ...
基于Nuttall自卷积窗的改进FFT谱分析方法
0
2014
基于Nuttall自卷积窗的改进FFT谱分析方法
0
2014
Aperture Synthesis with a Nonegular Distribution of Interferometer Baselines
2
1974
... 据此引进用于改进天文图像质量的CLEAN算法,CLEAN算法于1974年由Hogbom[5 ] 提出用于提高射电天文中综合孔径成像的质量;随后,Schwarz于1978年对CLEAN算法做了深入的数学理论方面的研究[5 ] ,研究表明CLEAN算法不仅能够抑制旁瓣,而且具有很高的信噪比.CLEAN算法自诞生至今,演变出了很多扩展算法,针对传统CLEAN算法在迭代过程中可能会选择较强的“假点”,酒明远[6 ] 提出了基于树形搜索算法的S-CLEAN算法;在图像处理中针对当旁瓣干扰是主要原因时,演变出了I-CLEAN算法[7 ] ;针对当处理图像为各种不同大小尺度的目标组成时,发明的多尺度CLEAN(MSC-CLEAN)算法[8 ] 等.CLEAN算法是一种消卷积过程,用于消除因空间频率域覆盖的不完整而产生的影响[9 ] ,其通过逐步迭代消卷积识别主瓣,消减旁瓣,重建真实目标的位置幅度信息,能够有效地减弱旁瓣对成像结果的影响.然而在实际工程中,系统存在的误差以及非合作运动目标的非平稳非匀速运动会使目标等效后向散射中心成像的sinc函数主瓣扭曲、旁瓣失真,造成了CLEAN算法“脏束”选择的困难,限制了CLEAN算法在实际工程中的应用. ...
... [5 ],研究表明CLEAN算法不仅能够抑制旁瓣,而且具有很高的信噪比.CLEAN算法自诞生至今,演变出了很多扩展算法,针对传统CLEAN算法在迭代过程中可能会选择较强的“假点”,酒明远[6 ] 提出了基于树形搜索算法的S-CLEAN算法;在图像处理中针对当旁瓣干扰是主要原因时,演变出了I-CLEAN算法[7 ] ;针对当处理图像为各种不同大小尺度的目标组成时,发明的多尺度CLEAN(MSC-CLEAN)算法[8 ] 等.CLEAN算法是一种消卷积过程,用于消除因空间频率域覆盖的不完整而产生的影响[9 ] ,其通过逐步迭代消卷积识别主瓣,消减旁瓣,重建真实目标的位置幅度信息,能够有效地减弱旁瓣对成像结果的影响.然而在实际工程中,系统存在的误差以及非合作运动目标的非平稳非匀速运动会使目标等效后向散射中心成像的sinc函数主瓣扭曲、旁瓣失真,造成了CLEAN算法“脏束”选择的困难,限制了CLEAN算法在实际工程中的应用. ...
ISAR成像中微多普勒现象及CLEAN技术研究
1
2010
... 据此引进用于改进天文图像质量的CLEAN算法,CLEAN算法于1974年由Hogbom[5 ] 提出用于提高射电天文中综合孔径成像的质量;随后,Schwarz于1978年对CLEAN算法做了深入的数学理论方面的研究[5 ] ,研究表明CLEAN算法不仅能够抑制旁瓣,而且具有很高的信噪比.CLEAN算法自诞生至今,演变出了很多扩展算法,针对传统CLEAN算法在迭代过程中可能会选择较强的“假点”,酒明远[6 ] 提出了基于树形搜索算法的S-CLEAN算法;在图像处理中针对当旁瓣干扰是主要原因时,演变出了I-CLEAN算法[7 ] ;针对当处理图像为各种不同大小尺度的目标组成时,发明的多尺度CLEAN(MSC-CLEAN)算法[8 ] 等.CLEAN算法是一种消卷积过程,用于消除因空间频率域覆盖的不完整而产生的影响[9 ] ,其通过逐步迭代消卷积识别主瓣,消减旁瓣,重建真实目标的位置幅度信息,能够有效地减弱旁瓣对成像结果的影响.然而在实际工程中,系统存在的误差以及非合作运动目标的非平稳非匀速运动会使目标等效后向散射中心成像的sinc函数主瓣扭曲、旁瓣失真,造成了CLEAN算法“脏束”选择的困难,限制了CLEAN算法在实际工程中的应用. ...
ISAR成像中微多普勒现象及CLEAN技术研究
1
2010
... 据此引进用于改进天文图像质量的CLEAN算法,CLEAN算法于1974年由Hogbom[5 ] 提出用于提高射电天文中综合孔径成像的质量;随后,Schwarz于1978年对CLEAN算法做了深入的数学理论方面的研究[5 ] ,研究表明CLEAN算法不仅能够抑制旁瓣,而且具有很高的信噪比.CLEAN算法自诞生至今,演变出了很多扩展算法,针对传统CLEAN算法在迭代过程中可能会选择较强的“假点”,酒明远[6 ] 提出了基于树形搜索算法的S-CLEAN算法;在图像处理中针对当旁瓣干扰是主要原因时,演变出了I-CLEAN算法[7 ] ;针对当处理图像为各种不同大小尺度的目标组成时,发明的多尺度CLEAN(MSC-CLEAN)算法[8 ] 等.CLEAN算法是一种消卷积过程,用于消除因空间频率域覆盖的不完整而产生的影响[9 ] ,其通过逐步迭代消卷积识别主瓣,消减旁瓣,重建真实目标的位置幅度信息,能够有效地减弱旁瓣对成像结果的影响.然而在实际工程中,系统存在的误差以及非合作运动目标的非平稳非匀速运动会使目标等效后向散射中心成像的sinc函数主瓣扭曲、旁瓣失真,造成了CLEAN算法“脏束”选择的困难,限制了CLEAN算法在实际工程中的应用. ...
Sequence CLEAN: A Modified Deconvolution Technique for Microwave Images of Contiguous Targets
1
2002
... 据此引进用于改进天文图像质量的CLEAN算法,CLEAN算法于1974年由Hogbom[5 ] 提出用于提高射电天文中综合孔径成像的质量;随后,Schwarz于1978年对CLEAN算法做了深入的数学理论方面的研究[5 ] ,研究表明CLEAN算法不仅能够抑制旁瓣,而且具有很高的信噪比.CLEAN算法自诞生至今,演变出了很多扩展算法,针对传统CLEAN算法在迭代过程中可能会选择较强的“假点”,酒明远[6 ] 提出了基于树形搜索算法的S-CLEAN算法;在图像处理中针对当旁瓣干扰是主要原因时,演变出了I-CLEAN算法[7 ] ;针对当处理图像为各种不同大小尺度的目标组成时,发明的多尺度CLEAN(MSC-CLEAN)算法[8 ] 等.CLEAN算法是一种消卷积过程,用于消除因空间频率域覆盖的不完整而产生的影响[9 ] ,其通过逐步迭代消卷积识别主瓣,消减旁瓣,重建真实目标的位置幅度信息,能够有效地减弱旁瓣对成像结果的影响.然而在实际工程中,系统存在的误差以及非合作运动目标的非平稳非匀速运动会使目标等效后向散射中心成像的sinc函数主瓣扭曲、旁瓣失真,造成了CLEAN算法“脏束”选择的困难,限制了CLEAN算法在实际工程中的应用. ...
重构图像中CLEAN算法的研究
1
2017
... 据此引进用于改进天文图像质量的CLEAN算法,CLEAN算法于1974年由Hogbom[5 ] 提出用于提高射电天文中综合孔径成像的质量;随后,Schwarz于1978年对CLEAN算法做了深入的数学理论方面的研究[5 ] ,研究表明CLEAN算法不仅能够抑制旁瓣,而且具有很高的信噪比.CLEAN算法自诞生至今,演变出了很多扩展算法,针对传统CLEAN算法在迭代过程中可能会选择较强的“假点”,酒明远[6 ] 提出了基于树形搜索算法的S-CLEAN算法;在图像处理中针对当旁瓣干扰是主要原因时,演变出了I-CLEAN算法[7 ] ;针对当处理图像为各种不同大小尺度的目标组成时,发明的多尺度CLEAN(MSC-CLEAN)算法[8 ] 等.CLEAN算法是一种消卷积过程,用于消除因空间频率域覆盖的不完整而产生的影响[9 ] ,其通过逐步迭代消卷积识别主瓣,消减旁瓣,重建真实目标的位置幅度信息,能够有效地减弱旁瓣对成像结果的影响.然而在实际工程中,系统存在的误差以及非合作运动目标的非平稳非匀速运动会使目标等效后向散射中心成像的sinc函数主瓣扭曲、旁瓣失真,造成了CLEAN算法“脏束”选择的困难,限制了CLEAN算法在实际工程中的应用. ...
重构图像中CLEAN算法的研究
1
2017
... 据此引进用于改进天文图像质量的CLEAN算法,CLEAN算法于1974年由Hogbom[5 ] 提出用于提高射电天文中综合孔径成像的质量;随后,Schwarz于1978年对CLEAN算法做了深入的数学理论方面的研究[5 ] ,研究表明CLEAN算法不仅能够抑制旁瓣,而且具有很高的信噪比.CLEAN算法自诞生至今,演变出了很多扩展算法,针对传统CLEAN算法在迭代过程中可能会选择较强的“假点”,酒明远[6 ] 提出了基于树形搜索算法的S-CLEAN算法;在图像处理中针对当旁瓣干扰是主要原因时,演变出了I-CLEAN算法[7 ] ;针对当处理图像为各种不同大小尺度的目标组成时,发明的多尺度CLEAN(MSC-CLEAN)算法[8 ] 等.CLEAN算法是一种消卷积过程,用于消除因空间频率域覆盖的不完整而产生的影响[9 ] ,其通过逐步迭代消卷积识别主瓣,消减旁瓣,重建真实目标的位置幅度信息,能够有效地减弱旁瓣对成像结果的影响.然而在实际工程中,系统存在的误差以及非合作运动目标的非平稳非匀速运动会使目标等效后向散射中心成像的sinc函数主瓣扭曲、旁瓣失真,造成了CLEAN算法“脏束”选择的困难,限制了CLEAN算法在实际工程中的应用. ...
CLEAN算法在机载毫米波综合孔径成像中的应用
1
2007
... 据此引进用于改进天文图像质量的CLEAN算法,CLEAN算法于1974年由Hogbom[5 ] 提出用于提高射电天文中综合孔径成像的质量;随后,Schwarz于1978年对CLEAN算法做了深入的数学理论方面的研究[5 ] ,研究表明CLEAN算法不仅能够抑制旁瓣,而且具有很高的信噪比.CLEAN算法自诞生至今,演变出了很多扩展算法,针对传统CLEAN算法在迭代过程中可能会选择较强的“假点”,酒明远[6 ] 提出了基于树形搜索算法的S-CLEAN算法;在图像处理中针对当旁瓣干扰是主要原因时,演变出了I-CLEAN算法[7 ] ;针对当处理图像为各种不同大小尺度的目标组成时,发明的多尺度CLEAN(MSC-CLEAN)算法[8 ] 等.CLEAN算法是一种消卷积过程,用于消除因空间频率域覆盖的不完整而产生的影响[9 ] ,其通过逐步迭代消卷积识别主瓣,消减旁瓣,重建真实目标的位置幅度信息,能够有效地减弱旁瓣对成像结果的影响.然而在实际工程中,系统存在的误差以及非合作运动目标的非平稳非匀速运动会使目标等效后向散射中心成像的sinc函数主瓣扭曲、旁瓣失真,造成了CLEAN算法“脏束”选择的困难,限制了CLEAN算法在实际工程中的应用. ...
CLEAN算法在机载毫米波综合孔径成像中的应用
1
2007
... 据此引进用于改进天文图像质量的CLEAN算法,CLEAN算法于1974年由Hogbom[5 ] 提出用于提高射电天文中综合孔径成像的质量;随后,Schwarz于1978年对CLEAN算法做了深入的数学理论方面的研究[5 ] ,研究表明CLEAN算法不仅能够抑制旁瓣,而且具有很高的信噪比.CLEAN算法自诞生至今,演变出了很多扩展算法,针对传统CLEAN算法在迭代过程中可能会选择较强的“假点”,酒明远[6 ] 提出了基于树形搜索算法的S-CLEAN算法;在图像处理中针对当旁瓣干扰是主要原因时,演变出了I-CLEAN算法[7 ] ;针对当处理图像为各种不同大小尺度的目标组成时,发明的多尺度CLEAN(MSC-CLEAN)算法[8 ] 等.CLEAN算法是一种消卷积过程,用于消除因空间频率域覆盖的不完整而产生的影响[9 ] ,其通过逐步迭代消卷积识别主瓣,消减旁瓣,重建真实目标的位置幅度信息,能够有效地减弱旁瓣对成像结果的影响.然而在实际工程中,系统存在的误差以及非合作运动目标的非平稳非匀速运动会使目标等效后向散射中心成像的sinc函数主瓣扭曲、旁瓣失真,造成了CLEAN算法“脏束”选择的困难,限制了CLEAN算法在实际工程中的应用. ...
利用压缩感知实现随机变频雷达散射中心估计
1
2016
... 在雷达成像中,目标被电磁波照射后,由于目标各部分对入射电磁波的角度的不同以及二次、多次散射等的原因,目标上会有一些对电磁波散射相对较强的位置,这些集中散射能量的位置称为散射中心[10 ] .在实际雷达成像中,复杂目标的电磁散射可以看成是一系列强散射中心的集合. ...
利用压缩感知实现随机变频雷达散射中心估计
1
2016
... 在雷达成像中,目标被电磁波照射后,由于目标各部分对入射电磁波的角度的不同以及二次、多次散射等的原因,目标上会有一些对电磁波散射相对较强的位置,这些集中散射能量的位置称为散射中心[10 ] .在实际雷达成像中,复杂目标的电磁散射可以看成是一系列强散射中心的集合. ...
Time Analysis and Processing of FMCW SAR Signals
1
2003
... 其中:f x [11 ] ,需要进行补偿. ...
毫米波FMCW SAR系统设计与成像研究
1
2016
... 逆合成孔径雷达接收的信号经过去斜得到完整的表达式如下[12 ] : ...
毫米波FMCW SAR系统设计与成像研究
1
2016
... 逆合成孔径雷达接收的信号经过去斜得到完整的表达式如下[12 ] : ...
调频连续波SAR信号分析与成像研究
1
2008
... 其中:A t t x R r e f f d T p [13 ] . ...
调频连续波SAR信号分析与成像研究
1
2008
... 其中:A t t x R r e f f d T p [13 ] . ...
A Novel Algorithm for Accurate Frequency Measurement Using Transformed Conse Cutive Points of DFT
1
2008
... 在实际的成像处理中,由于发射机发射信号带宽的有限性以及计算机在进行快速傅里叶变换(FFT)时,容易出现频谱泄漏和栅栏效应[14 ] ,为了抑制频谱泄漏和栅栏效应对频谱分析的影响,一般采用在时域加窗进行处理. ...
Mathematical-statistical Description of the Iterative Beam Removing Technique(Method CLEAN)
1
1978
... 对窗函数的选择,主要是考虑主瓣越窄越好,旁瓣越低越好,旁瓣衰减速率越快越好,然而,同时满足上述条件的窗函数是不存在的[15 ] ,故在实际分析中,往往是以上因素进行妥协折中;本文选择Kaiser窗(β = 6 图2 所示. ...
A Modified Algorithm for Cleaning Wide-field Maps with Extended Structures
1
1990
... 在ISAR成像模型中,理想点目标的后向散射中心模型由式(4) 可知为二维sinc函数,可见ISAR成像将受到sinc函数旁瓣叠加问题的影响,不妨将模型中的二维sinc函数称为“脏束”(dirty beam),将只含有主瓣的点扩散函数称为“清洁波束”(clean beam)[16 ] ,一般选择二维高斯函数: ...
Development in Radar Imaging
1
1984
... 系统的详细参数如表1 所示.首先对测得的数据进行RD算法处理[17 ] ,得到的雷达原始成像.由公式(4) 推导可知,理想点目标回波经过去斜压缩处理,得到的点目标成像为二维sinc函数,然而针对不同场景的实际情况,会存在观测角度的不同,目标非平稳运动等的影响,导致回波的二维sinc函数主瓣扭曲变形;据此,将对CLEAN算法中“脏束”的主瓣进行适当的尖锐化处理,以加强对目标的识别能力及对环境的适应性,如图8 所示,成像结果的对比如图9 所示. ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}