




1 引 言
我国的土地幅员辽阔,土地上的地物类型多种多样,这些信息在高分辨率遥感图像上有非常清晰和直观的展示。对于应用部门而言,掌握不同地物的分布情况不仅可以了解一个城市乃至一个国家的现状及发展情况,还可以借此规划城市或国家未来的发展方向。
自从2012年Hinton等[1]学者提出AlexNet网络并取得成功之后,卷积神经网络算法就逐渐取代传统的图像处理方法,成为了遥感图像处理领域的研究热门。2014年R-CNN[2]实例分割网络的提出将图像分割推到了一个新的高度,这是深度学习首次应用于目标检测的领域。实例分割网络和U-Net[3]、SegNet[4]等成熟的语义分割网络最大的不同点在于,实例分割不仅仅要在像素层面将属于物体的前景和背景分离出来,还要在像素层面给出每个物体单独的像素并给予边界框定位。自从实例分割网络首次被引入到像素级的语义分割起,诸多学者对其进行了改革。SPP-Net[5]在R-CNN网络的基础上加入了金字塔池化,降低了输入图片尺寸大小对结果的影响;Fast R-CNN[6]减少了R-CNN中繁琐的池化过程,加入RoIPooling,采取单尺度池化以加快网络的运行速度;Faster R-CNN[7]网络摒弃了R-CNN和Fast R-CNN中消耗大量时间的Selective Search,用区域建议网络(RPN)实现了端到端的训练,在大大提升训练速度的同时也很好地改善了区域提取的准确率。
Nie等[10]和Zhang等[11]根据船舶细长不好辨认的特点,基于改进的Mask R-CNN对船舶进行了目标检测;Zhao等[12-13]应用该网络提取出了高分辨率卫星影像中的建筑物并取得了很好的效果;Zhang等[14]通过改善的Mask R-CNN网络对数据集进行了实例分割,并取得了比原网络更理想的结果。在其他的一些实验研究中,田锦等[15]基于Mask R-CNN进行了地面标识检测的实验;白宝林[16]对网络进行了微调,提高了网络效率并对车辆进行识别;邓琉元等[17]引入了可变性的卷积和可变性的池化层,以应对基于环视相机的识别问题;陈茗杨等[18]增大了RoIAlign层的分辨率,增加了掩膜(Mask)分支里图片的尺寸,提升了算法的效率;张旭东等[19]在Mask R-CNN的基础上引入Depth特征,使网络学习到了深度信息。
使用Mask R-CNN卷积神经网络进行遥感影像中地物的分割,该网络是目前效果最好的实例分割网络,通过FPN[20]、RoIAlign以及Mask branch(掩码层分支)三项改进可极大提升识别准确率。相比于传统语义分割网络,该网络具有更高的精度,并能够准确分辨出每一个不同个体及相对应的位置。Mask R-CNN网络已经成为实例分割领域中各种网络的佼佼者。
上述各种研究中,关注点主要集中在分割结果和真实值的契合度以及网络的准确率上,较少关注到矢量图像的语义信息。另外,上述研究均基于一些照片和简单地物,预测难度不高。如果范围扩大到整个城市的高分遥感影像,其预测难度就会大大增加。这主要因为上述研究的输出结果为栅格格式,而栅格格式无法统计语义信息,故必须要转为矢量结果。目前可以将栅格格式转化为矢量格式的唯一方法是GDAL开源栅格空间数据转换库(之后统称为GDAL库)。但是当GDAL库在处理过大的图像、图像中有大量锯齿或零碎像素点时,函数会出现卡退、无法执行的情况,从而无法得到理想的矢量格式结果。
基于卷积神经网络的图像分割都是以小的图像瓦片为单位,即通过训练好的模型预测图像瓦片,并把预测后的瓦片拼合成一张完整的大图。如果输出格式为栅格,则在拼合的过程中可以生成一幅完整的大图。但是GDAL库的拼合函数在矢量合成时仅仅是简单的图片拼合,并没有实际合成一个整体。虽然这对图像的质量没有很大影响,但当输出格式为矢量并进行矢量信息统计时会产生很大误差。所以,如何修复矢量预测结果中的缝隙,就成为了一个关键性的问题。
在修复缝隙的算法中,最著名的DeepCrack[21]算法意在识别裂缝并以最快的速度预测单幅图像,其出发点和目标与本文不同。本文试图通过裂缝修复,达到预测大图并得到完整矢量语义信息的效果,并使该方法在实例分割网络上具有普适性。
为此,本文提出了针对卷积神经网络预测结果缺陷的缝隙修复算法,并以Mask R-CNN网络为例进行了应用。该算法的目的是解决卷积神经网络在预测矢量结果并拼合成完整大图过程中会出现缝隙的问题。预测时先使用overlapsize算法缩小瓦片之间的缝隙,同时改善预测结果与真实结果的匹配程度;再通过PostGIS中的函数,选出与矢量瓦片边界相交的矢量地块,识别交点的坐标并完成合并,最后把不和边界相交的矢量地块添加进来,生成最后的结果。此方法生成的矢量大图速度快、精度高、质量不受影响,且大大方便了日后的统计工作。
2 Mask R-CNN网络原理及缝隙修复算法研究
2.1 Mask R-CNN网络基本原理
图1
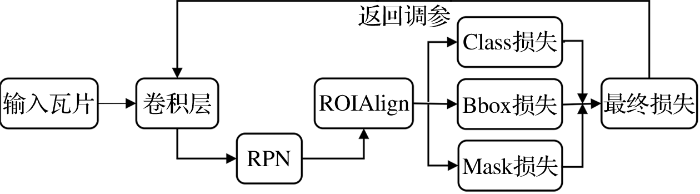
图2

该网络相对于其他卷积神经网络是否拥有更好的分割效果,关键在于FPN、RoIAlign和损失部分的Mask分支这3部分的改进工作。
FPN (Feature Pyramid Network)是特征金字塔网络的缩写。FPN建立了每一层之间的横向连接,将深层的语义信息和浅层的特征有效地结合在一起;使得较低的层次在语义丰富的同时又增加了细节。
该网络的第二项创新在于RoIAlign对RoIPooling的替代。Fast R-CNN和Faster R-CNN网络中的RoIPooling在下采样的过程中进行了两次量化取整的操作,这样的取整会使边界框定位发生偏移。RoIAlign算法取消了这两步量化的操作,将之改为双线性插值:即每一个RoI框的4个顶点的坐标都由它周围4个网格点的坐标经过线性插值得到,这样就大大增加了Bounding box线框的准确性。
该网络的第三项改进是增加了与分类回归和Bounding box回归并行的Mask branch(掩码层)。掩码层的主要作用在于可以对每一个RoI精确预测类别。有多少类别就会生成多少Mask,第i个类别的RoI只会与第i个Mask有关,不会受到其他Mask的影响。
2.2 缝隙修复算法研究
缝隙修复算法由两个流程组成,分别为第一步的Overlapsize算法以及第二步的填补缝隙算法。后文将针对这两个流程的原理做详细阐述。
卷积神经网络的预测过程同样把未经训练、待预测的栅格影像瓦片作为输入,加入在训练过程中调整好的参数模型后,输出得到相应的预测结果。然而预测为矢量格式的缺陷在于,一些地物如果被裁剪为很多细碎的部分,并分布在周围的若干瓦片之中时,有很大几率不会被模型识别并预测出正确结果,造成识别误差。
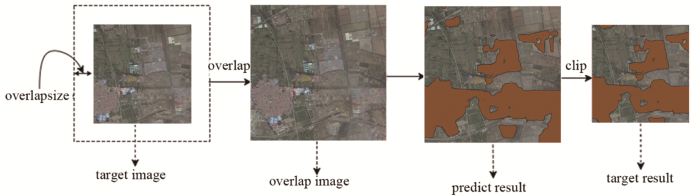
实验将缝隙修复算法在预测过程中加入Overlapsize算法,即在预测之前先将待预测栅格影像瓦片扩大同等宽度的一圈,待模型预测扩大后的图像以后,再对预测结果进行裁剪,使其恢复原来的大小。这种改进的好处在于预测过程中那些瓦片里被切割细碎的小地物不会被忽视,从而可得到更为准确的分割结果。Overlapsize算法的原理如图3所示。
图3
Overlapsize算法可以改善预测过程中小地块的识别问题,并且对栅格图预测和矢量图预测一并适用。然而,Overlapsize算法尽管改善了预测结果的质量,却不能解决矢量预测结果中因存在缝隙,导致语义信息有误的问题。故实验在合成大图后提出缝隙修复算法的第二步—填补缝隙算法,目的是修补矢量大图中的裂缝,使之合成一张语义信息完整的矢量大图。该算法基本原理是通过在本地连接服务器,并且在远程服务器上利用PostGIS函数,使用SQL语句执行缝隙修补。在执行算法之前,首先需要在预测图片的同时生成每张矢量瓦片包围的线框矢量,并且将矢量瓦片和线框瓦片通过gdal_merge算法分别合成为两个待处理的大图。这两张大的矢量图将会作为缝隙修复算法的输入。
从连接数据库到最后生成拼合的矢量结果,整个过程共分为5个步骤。第一步为数据库连接,具体操作方法为输入服务器的主机地址、想要连接的数据库名称、数据库用户名、用户名密码以及主机的端口号,通过python中的模块函数实现服务器的连接。第二步为读取文件并创建数据表。用Python中的函数读取线框大图以及矢量大图,并通过SQL语句在远程数据库中创建数据表,将读取的线框大图以及矢量大图信息传输到新创建的矢量表中。第三步为核心算法,即通过PostGIS中的函数填补矢量大图中的缝隙。第四步为导出矢量,即将执行后生成的结果数据表导出为矢量文件,并保存到本地的路径中。最后一步为断开服务器连接。操作方法为将数据库中所有相关数据表归类,并用Python的函数断开数据库连接,结束整个算法的流程。
算法流程的第三个步骤为核心算法处理,该步骤通过PostGIS函数达到消除缝隙的目的。算法核心部分的流程如图4所示。
图4
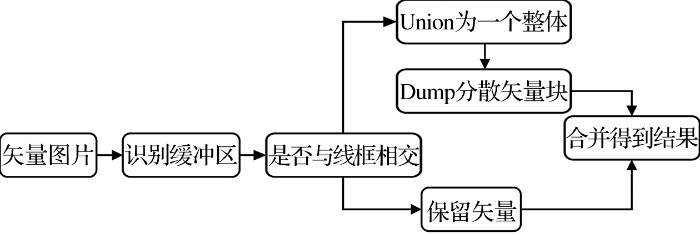
填补缝隙算法流程中,首先通过PostGIS数据库中的st_buffer函数获取缝隙缓冲区的几何对象,并设置缓冲区阈值为一浮点数(本例中为0.001 m)。如果将阈值设置过大,尽管会加快实验速度,但会导致原本不相关的两块田地被识别为同一类,从而引起矢量结果崩溃;如果将阈值设置过小,会大大减慢实验速度,并且在阈值小于某一临界值后,可能造成因为阈值小于缝隙宽度而不能将同一地块的两部分合并。本函数的输入为经过Overlapsize算法以后的矢量图片,输出为半径为阈值大小的缓冲区,从而获取到矢量缝隙所在位置。
其次,填补缝隙算法在此处设置判断语句,判断每一个小的矢量瓦片中,诸多矢量多边形是否与线框,即矢量瓦片的边界处存在交集,并把有交集和没有交集的两类矢量多边形分类存放在两个数据表中。如果瓦片中的矢量多边形与缝隙不存在交集,则保持原矢量多边形;针对与线框有交集的多边形,缝隙修复算法采用st_union函数进行合并,将所有零碎的矢量多边形合而为一。但由于st_union函数执行合并后所有矢量多边形合并成为了一个矢量,违背了将每一个地块独立开来,生成独立矢量信息的基本原则,故算法需再运用st_dump函数进行打散。打散以后,每一个地块即可被独立分开,且缝隙也得到了填补。最后,该算法再把和线框没有交集的矢量多边形加入,经过合并以后生成最后的结果。中间核心的处理部分代码如下文所示。
with
line as (select st_buffer(线框数据表.geom, 0.001) as geom from 线框数据表),
block_intersect as (select block.* from 矢量数据表 block, line where st_intersects (block.geom, line.geom)),
block_union_result as (select (st_dump(st_union (st_buffer(st_makevalid(geom), 0.0001)))).geom from block_intersect),
block_not_intersect as (select 矢量数据表.geom from 矢量数据表 where frame_sql.id not in (select id from block_intersect)),
result as (select * from block_union_result union select * from block_not_intersect)
select * from result
3 实验过程与结果分析
3.1 实验设置及实验流程设计
实验将针对农田地块进行实例分割,对数据集中的农田地块进行标注后使用Mask R-CNN网络进行训练,并在预测过程中加入Overlapsize算法进行对比分析。然后,在加入Overlapsize算法得到结果的基础上再加入填补缝隙算法,通过实验结果对比体现出缝隙修复算法的优异性能。
实验的深度学习模型基于PyTorch搭建,使用Mask R-CNN网络作为基础框架,硬件环境采用Nvidia GeForce GTX 1080 GPU显卡。采用公开的coco-2014数据集和ImageNet数据集对网络进行预训练,将经典的ResNet-50+FPN作为特征提取的骨架部分。实验开始时统一将输入图片的大小设置为256×256像素,初始学习率设置为0.002 5,权重衰减设置为0.000 1。
实验的第一步是图像裁剪。所有的原始图片都要切割成相应输入尺寸,在本实验中为长宽为256×256像素的图像瓦片。除了原始的影像以外,还要生成与之对应的真实值(Ground Truth)标签。并将所有处理好的图像瓦片一并放入网络当中。
第二步是特征提取,即通过Mask R-CNN初始的骨架网络提取出图像的浅层和深层特征。Mask R-CNN普遍采用的backbone是FPN,因为它可以融合特征映射并得到理想的输出。输出的结果输入至RPN和ROIAlign。
第三步是分类回归。根据RPN网络本身的特性,对所有边界框进行筛选并挑出300个候选边界框放入RoIAlign。输出得到的结果作为损失函数的输入进入损失函数,并且根据三类不同的损失函数对最终的结果进行分类回归。
第四步是返回调参。根据上一步得到的损失函数Loss值的反馈,整个网络框架会返回到卷积的部分调参,对网络整体进行完善。
第五步是预测结果。训练结束以后会得到已完成调参的实验模型。根据模型和测试集进行网络预测,得到最后的预测结果。
3.2 实验数据来源
实验采用美国堪萨斯州高分辨率的正射遥感图像作为实验的数据源,原因在于该地区农田形状相对规范,并且地形复杂多样,便于进行深度学习的研究。本实验下载了美国堪萨斯州2019年9月初的无云10 m分辨率哨兵2号影像,并采用人工精修过的已有堪萨斯州农作物矢量文件作为与影像相对应的标签图。
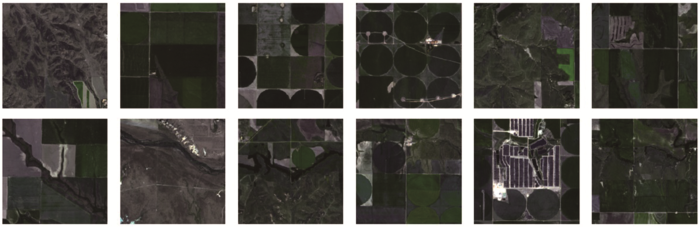
实验首先通过裁剪得到了4 000余张256像素×256像素大小的影像,其中随机选取80%作为训练集,其余作为验证集。测试集遥感影像选取2019年9月初美国堪萨斯州的另一无云10 m分辨率哨兵2号影像地块,目的是保持地物类型相同的同时不与训练集及验证集存在交集。训练集中的部分影像样本如图5所示。
图5
3.3 实验结果与分析
图6
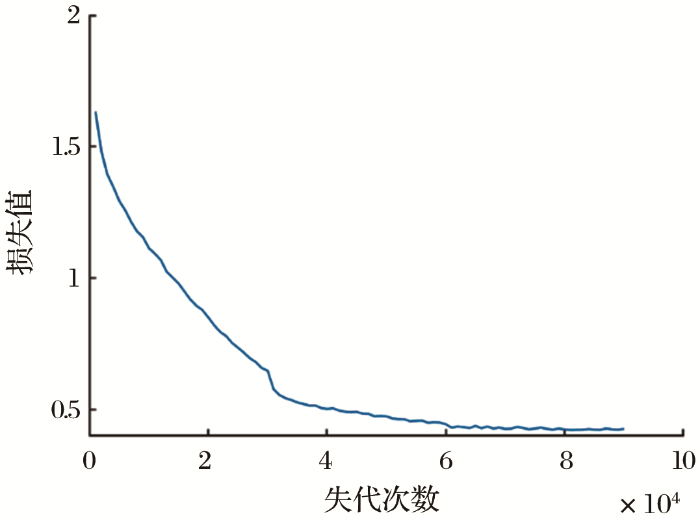
图7
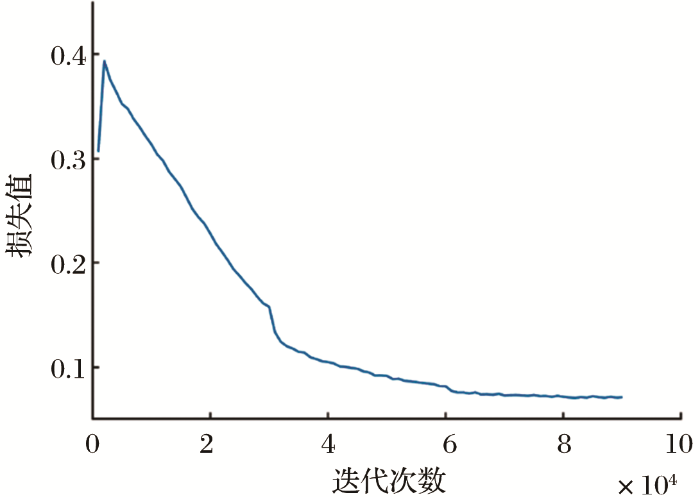
图8
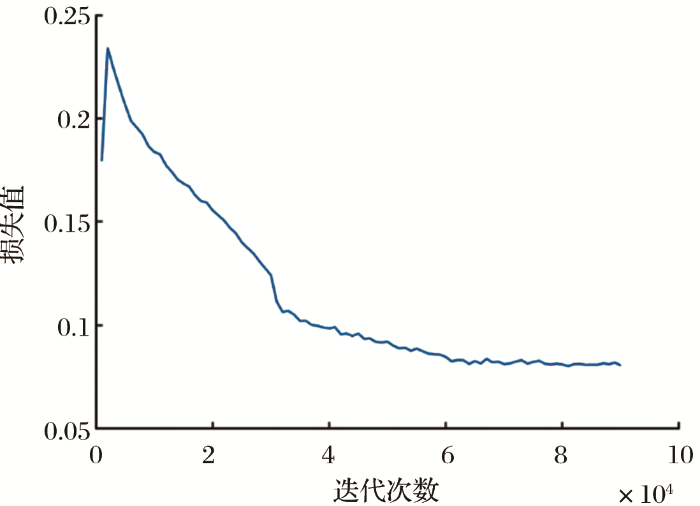
图9
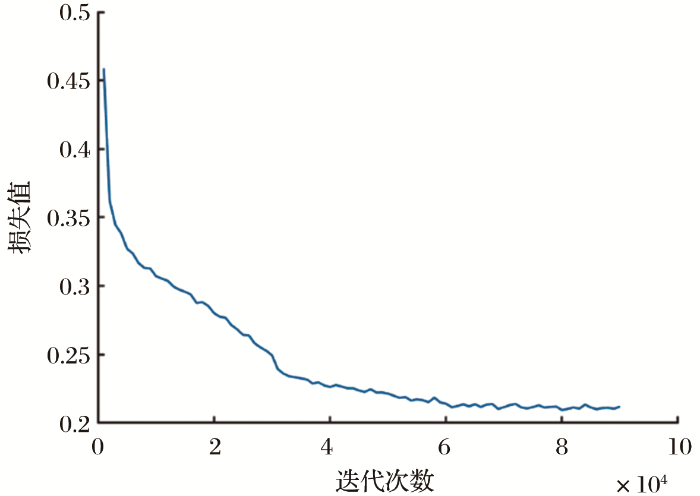
表1 网络训练精度
Table 1
| 精度 | AP | AP50 | AP75 |
|---|---|---|---|
| Mask R-CNN/% | 33.6 | 55.2 | 35.3 |
| 本实验/% | 34.0 | 55.5 | 35.4 |
图10
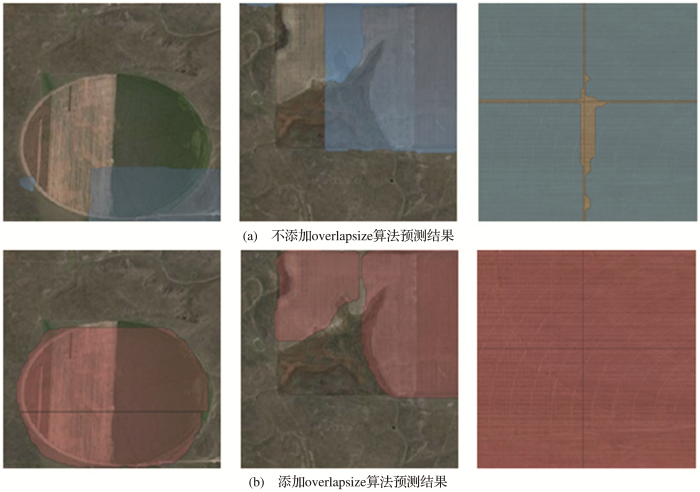
图10
Overlapsize算法实验对比图
Fig.10
Experimental comparison of overlapsize algorithm
从图10的对比中可以看出,有些地方二者的预测结果都很理想,而有些地方(图10(b)左一、左二)加入Overlapsize算法的预测结果要明显好于不加入Overlapsize算法的结果。如果没有Overlapsize算法,在预测结果中会存在两点主要缺陷:一是当某地物(本实验中的农田地块)被分割成为多个瓦片图像时,被分割后的某些碎片会因为面积太小而不容易被网络识别出来,那么在合成为完整影像以后,重新拼凑好的地物将会缺失一角,从而带来很大误差;二是当某一个地物被分割成为多个瓦片图像后,被分割后的碎片都被网络识别出来,那么在拼合以后一个完整的地物上面就会出现多个边界框,除此之外还会有很宽的缝隙,这会影响到视觉效果。而Overlapsize算法通过 “先放大再裁剪”的步骤巧妙地规避了这两点缺陷,使得一个完整良好的分割结果能够展示出来。
然而,Overlapsize算法也造成负面影响。因为Oerlapsize算法在执行时裁剪掉了最外面的一圈预测结果,使得预测得到的大图比输入的大图少了一圈最外面的影像信息,导致了信息的丢失。如果图片尺寸较小,该算法会给结果带来很大的影响。图片的尺寸越大,相对应的影响也越小。由于本文研究的数据集是堪萨斯州,图像尺寸较大,所以该算法的缺陷给结果带来的损失可以忽略不计。
图11
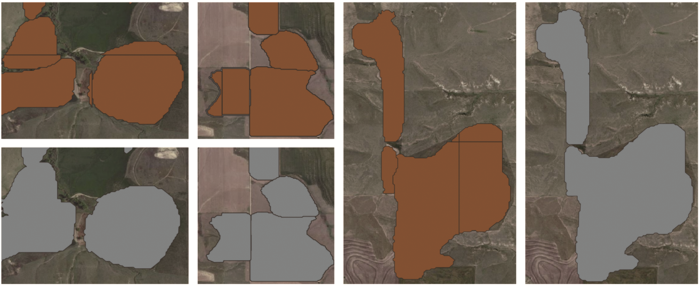
图11中棕色矢量多边形为未添加填补缝隙算法的预测结果;灰色矢量多边形为添加填补缝隙算法的预测结果。矢量图的大小为63 MB,测试集影像的分辨率为10 m,宽高分别为11 397像素×10 979像素。该算法在此条件下的运行时长为4 min。对比之下,GDAL函数运行较小,曲面平滑的栅格图时拥有很快的速度,但当曲面不平滑且矢量图面积很大时,GDAL函数会发生卡崩,从而无法预测出矢量图。运行时长虽然与本机电脑中央处理器性能相关,但该填补缝隙算法都可以在远小于GDAL函数的时间内完成转矢量并输出理想的矢量结果。说明该算法完全可以胜任更大数据量的处理,不会出现由栅格转矢量的过程中容易发生的卡退现象。
从图片的效果看,除了个别的预测存在边界框拼合方面的误差,几乎所有的农田田块都完成了合并,并且矢量图的质量没有受到任何影响。加入缝隙修复算法以后,既可以保证图像在预测过程中的质量不受影响,又可以得到完整的矢量大图,并在数据量非常大的时候仍然能在最短时间内完成任务。说明该算法在进行大数据量影像预测时是十分有效的。
现阶段处理大影像的通用方法是分块处理并在最后进行拼合。这种做法虽然分块越小单块的处理时间就越少,但会导致总块数大大增加,这与预测出256×256的小瓦片再进行拼合的方法没有本质上的差别。除此之外,无论是进行何种分块操作,如果想要统计矢量信息,最后都会不可避免地涉及到矢量的拼合工作。在缝隙客观存在的基础上,GDAL函数无法从自身实现这种缝隙拼合。本文研究的缝隙修复算法的优势就在于无论处于什么情况,该算法均可实现图片一次性输入得到矢量图,并能在很短时间内运行出准确结果;另外由于该算法与网络预测并不矛盾,所以对任意实例分割网络均可使用。因此,本算法具有普遍性、适用性和实用性,可进行推广与应用。
4 结 论
针对基于Mask R-CNN网络的实例分割中预测结果出现较大语义信息误差的问题进行了深入研究,提出了解决该问题的缝隙修复算法,通过overlapsize算法以及PostGIS数据库中的函数填补缝隙,完善了地块图像的语义信息。
对比实验表明,相比于传统GDAL算法,该算法处理效率极高,可在很短时间内完成大幅矢量图的处理;同时,算法并不会对网络本身的分割精度造成负面的影响;另外,算法具有很好的实用性,能够应用于几乎全部的神经网络处理图像案例。在解决大型矢量图的语义信息问题方面,该算法具有良好的应用前景。
参考文献
ImageNet Classification with Deep Convolutional Neural Networks
[C]∥
Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation
[C]∥
U-Net: Convolutional Networks for Biomedical Image Segmentation
[C]∥
Segnet: A Deep Convolutional Encoder-decoder Architecture for Image Segmentation
[J].
Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition
[J].
Fast r-cnn
[C]∥
Faster R-CNN: Towards Real-time Object Detection with Region Proposal Networks
[C]∥
Mask R-CNN
[C]∥
Feature Pyramid Networks for Object Detection
[C]∥
Inshore Ship Detection based on Mask R-CNN
[C]∥
Nearshore Vessel Detection based on Scene-mask R-CNN in Remote Sensing Image
[C]∥
Building Extraction from Satellite Images Using Mask R-CNN with Building Boundary Regularization
[C]∥
Automatic Building Extraction from Google Earth Images Under Complex Backgrounds based on Deep Instance Segmentation Network
[J].
Toward Efficient Simultaneous Detection and Segmentation
[C]∥
Ground Mark Detection based on Mask R-CNN
[C]∥
基于 Mask R-CNN 的地面标识检测
[C]∥
Vehicle Identification and Detection based on Improved Mask R-CNN
[D].
基于改进的 Mask R-CNN 的车辆识别及检测
[D].
Surround View Cameras based Instance Segmentation Method for Autonomous Vehicles
[J].
Image Instance Segmentation based on Deep Learning
[J].
基于深度学习的图像实例分割
[J].
RGB-D Multi-class Instance Segmentation based on Double Pyramid Feature Fusion Model
[J].
基于双金字塔特征融合网络的RGB-D多类实例分割
[J].
Feature Pyramid Networks for Object Detection
[C]∥
DeepCrack: A Deep Hierarchical Feature Learning Architecture for Crack Segmentation
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}