




1 引 言
由于气候变化,台风灾害对沿海城市绿化园林树木的破坏强度呈现逐年增加的趋势[1]。台风灾害后的损失评估是林业统计、生态监测和灾后重建的重要组成部分。快速、高效地获取台风倒伏木的统计数据是林业部门、风控部门的共同需求。
传统的倒伏木野外调查方法主要采用手工计数和采样方法,比如Thompson等[2]在飓风“艾克”过后,对美国休斯顿的多个400 m2随机样地内被刮倒的树枝和树干进行了空间分析,以确定倒伏木的分布情况。Staudhammer等[3]通过野外实测,采用飓风后受损树木的树干大小、空间分布等统计数据来评估飓风对城市森林的破坏程度和灾后重建的成本。显然,这种野外数据采集方法的成本高,调查周期长,不能够及时地向有关部门提供灾后受损情况。为了弥补野外调查效率低下的缺陷,光学遥感和激光雷达技术在这一领域得到了广泛的应用。Szantoi等[4]基于高分辨率遥感影像,通过Sobel边缘检测结合光谱信息检测研究区内飓风过后被刮倒树木的体积。激光雷达具有穿透植被和森林覆盖层的能力,已经被证明是提取单木的有效工具[5-8]。Eamer等[9]利用激光雷达数据与数字正射影像结合的方法,对加拿大西海岸沙滩上的粗木屑进行提取。Lindberg等[10, 11]基于高度特征消除冠层下物体的干扰,再通过模板匹配方法检测区分出被刮倒的树木点云,正确率分别为32%和38%,结果较高的树木(>27 m)比低矮的树木更容易被检测出来。近年来无人机遥感技术被广泛应用于林业方面[12-15]。Windrim等[16]基于无人机可见光影像估算砍伐后砍伐区内碎木屑的体积;Duan 等[17]基于无人机遥感影像,提出了一种由粗到细的倒伏木提取方法,虽然精度较高,但没有在人造干扰物较多的城市区域进行试验;汤剑雄等[18]结合树干的形状和无人机影像的像元光谱特征检测台风灾后倒伏木的树干,准确率达到75%,其中误差来源主要是道路边缘、屋顶等线状地物。上述方法主要存在以下问题:①光学遥感影像往往分辨率较低,难以实现单木尺度的提取。②激光雷达数据虽可以根据其高度特征消除一些影响因素,但对于如道路边缘、斑马线等线状地物往往很难与树干区分开。因此在前人研究的基础上,基于可见光波段无人机影像,针对道路边缘、斑马线等线状干扰地物,提出了基于不同数据源情况下的倒伏木检测方法。为园林部门进行台风灾害损失评估及灾后重建提供参考。
2 研究区与数据源
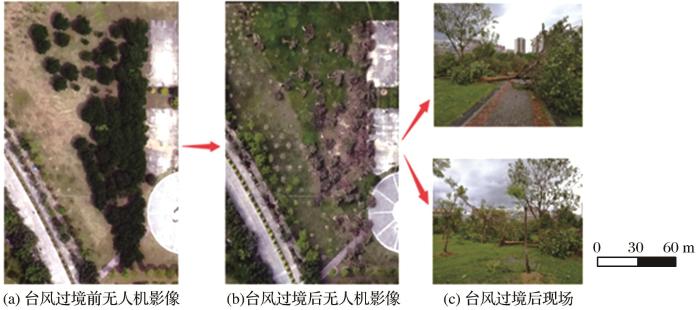
试验区位于福州大学教学区的一块绿化地,2018年7月超强台风“玛利亚”给该地区造成了严重影响,大量树木被台风刮倒。台风灾害前后的无人机遥感影像均选用eBee专业测绘级无人机作为遥感平台,搭载1 800万像素SONYWX220相机,等效焦距24 mm;影像获取时间分别为2017年5月10日和2018年7月12日,天气状况良好,满足飞行条件。飞行参数均设为:飞行速度15 m/s、航向重叠率为80%、旁向重叠率为60%、相对航高500 m,处理后影像的覆盖面积分别为1.68 km2和1.79 km2,正射影像的分辨率均为0.1 m。在该区域选择了一块倒伏木集中的区域进行了测试。该区域面积为0.013 km2,区域内除倒伏木外还含有较多的干扰物,如道路边缘、斑马线等背景较为复杂,如图1所示。
图1
3 研究方法
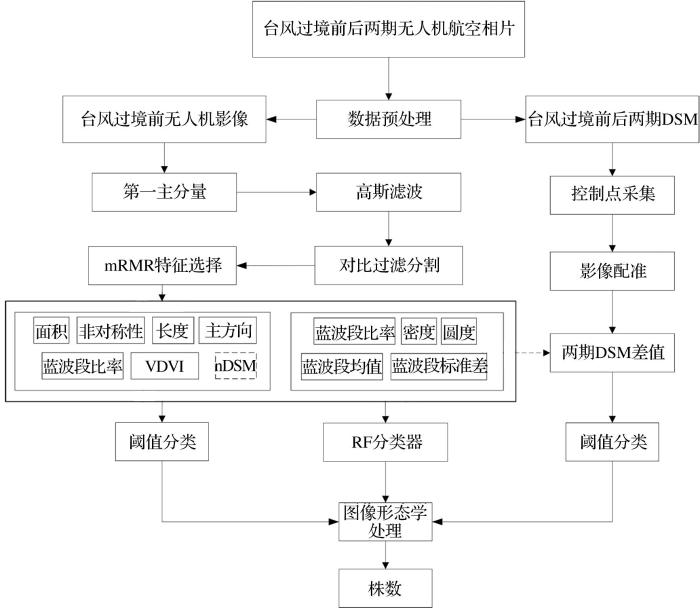
研究方法主要分为无人机影像的后期处理和倒伏木树干检测方法两个部分。技术路线如图2所示。
图2
3.1 无人机数据处理
无人机图像采用Pix4Dmapper软件进行处理,该软件具有快速、准确、高效的特点。主要是基于传统的摄影测量的方法[19],通过识别图像的特征点,并且利用这些特征点检索空中三角测量的参数,然后利用直方图匹配的方法实现图像之间的颜色平衡,最终生成数字正射影像(Digital Orthophoto Map,DOM)和数字表面模型(Digital Surface Model,DSM)。
3.2 无人机数据几何配准与两期DSM差值生成
3.2.1 DSM生成
为消除地形变化对地物高程的影响,从而获取到相对准确的地物形态信息,采用布料模拟滤波算法(Cloth Simulation Filter,CSF)对获取的无人机影像点云数据进行地面滤波,得到地面点与非地面点。采用反距离权重法(Inverse Distance Weight,IDW)插值方法生成DSM。IDW算法的原理为当计算一个格网结点时,配给的权重是一个分数,所有权重的总和等于1.0。当一个观测点与一个格网结点重合时,该观测点被给予一个实际为1.0的权重,所有其他观测点被给予一个几乎为0的权重。最终,生成的格网单元大小为0.1 m×0.1 m。
3.2.2 两期DSM配准
由于两期无人机影像是不同的飞行架次采集获取的,因此两期影像在地理位置上存在一定的差异。若直接采用台风过境前后两个时期的DSM,无法保证高程变化的位置与实际对应,对树干的提取会产生较大的误差。因此,在影像生成的过程中考虑加入地面控制点,以减少影像在地理位置上的差异带来的影响。在影像区域内选取了16个分布均匀的地面控制点。布设像控点时主要选取道路交叉口、斑马线拐点等易于识别的地方。为验证两个时间点影像分析得到的DSM配准精度,两幅影像中同名点的平均空间误差为0.2 m,不能满足实际应用的精度需求。因此,在两期DOM均匀的选择了22对同名点并将其应用到DSM影像上,将2017年和2018年的DSM进行配准。其中12对作为控制点,剩余10对作为验证点,结果显示同名点的平均点位偏移量为0.08 m。经过配准,两期DSM的空间位置偏移得到抑制。
3.2.3 两期DSM差值生成
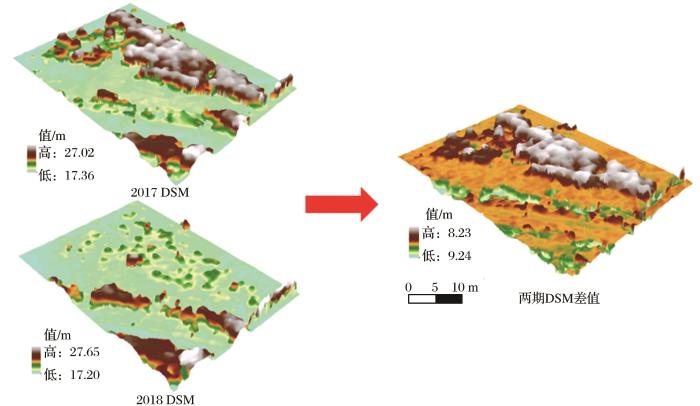
台风过境前后两期DSM进行高程相减后就能够得到两期DSM差值,其目的是消除地面未发生变化的斑马线、道路边缘等地物,从而准确地获取树干信息。从图3中可以看出倒伏木区域内高程变化明显,其中白色区域为倒伏木的树冠位置。两期DSM差值影像的最低值为-9.64 m,其主要原因是在部分未倒伏树木树冠的边缘区高程值出现了异常,而倒伏区域的高差为正值,因此可以忽略异常高程值对倒伏树木提取精度的影响。
图3
3.3 图像分割与分类
3.3.1 对比过滤分割(Contrast Filter Segmentation)
图像分割是依据图像自身的颜色、纹理、灰度和结构等差异而进行。对比过滤分割是一种自上而下的分割技术,该方法主要是逐行检测影像的像元DN值,当像素DN值局部明显改变,就认为是图示地物的边缘区域,最后将图像按照像素级别分割。
采用对比过滤分割方法对滤波增强后的第一主分量进行分割实验,其中对象尺度参数表示将影像分割成一定大小的格网。通过在影像上量取倒伏木树干长度,其平均树干长度为5 m,因此设置对象尺度为50个像元。而下限阈值参数表示将像元亮度值大于该阈值的像元合并为一个对象。通过影像对比分析发现,下限阈值设置为1时,能够较好地将树干与非树干进行分割。
3.3.2 特征选择
互信息最大化特征选择算法(maximum Relevance Minimum Redundancy,mRMR)是一种能够快速的检测一组相关和互补特征的特征选择算法[22]。mRMR算法的思想是所选的各特征之间具有最小信息冗余且各个特征与目标类别具有最大的关联性,具体公式如下:
其中:maxV表示类别c与特征xi之间的最大互信息、minW为特征xi与特征yj之间的最小信息冗余、|S|表示特征集合S中的特征元素、
选取常见的25种特征数据进行特征选择,其中光谱特征11个,形状特征11个,以及2个自定义特征和1个高度特征[23-25],特征定义式如表1。利用mRMR特征选择算法从众多的特征中选择与目标地物具有最大相关性和最小信息冗余的最佳特征子集。通过特征选择算法,按照相关性大小依次选择面积(Area)、绿波段比率(Ratio of Green)、不对称性(Asymmetry)、长度(Length)作为最佳特征子集。通过先验知识可知,树木倒伏方向与风向大致相同;树干与植被在可见光差异植被指数[26](Visible-band Difference Vegetation Index,VDVI)上有较大的差异;树木倒伏后与地面还存在一定的高度差,而道路边缘、斑马线等与地面高程几乎一致;树木发生倒伏后,在倒伏木区域内两期DSM出现了突变。因此,选取主方向特征、VDVI、归一化数字表面模型(normalized Digital Surface Model,nDSM)
表1 最优特征子集汇总表
Table 1
| 特征名称 | 定义式 | 备注 |
|---|---|---|
可见光植被指数 VDVI | 、B为可见光影像各波段均值,其值为[-1,1] | |
| 边界指数 | 其中, | |
| 非对称性 | 其中, | |
| 密度 | 其中, | |
| 紧密度 | 其中, | |
归一化表面模型 nDSM | DSM-DEM | 其中,DSM为数字表面高程模型、DEM为数字高程模型,其值为[-∞,+∞] |
| 两期DSM差值 | DSM1-DSM2 | 其中DSM1、DSM2为台风过境前后的DSM |
| 椭圆拟合性 | 其中, | |
| 主方向 | 其中, | |
波段比率 Ratio R/G/B | 其中, | |
| 圆度 | 其中, | |
| 长度 | 其中, | |
| 形状指数 | 表示对象的边界长度与面积的比值,其值为[0,+∞] |
3.3.3 基于阈值的树干信息检测
阈值选取的好坏直接关系到提取的精度。常见的阈值确定方法包括直方图双峰法、Otsu法和迭代法等。选取Otsu阈值法(最大类间方差法)[27],该算法比较简单、适用范围较广。Otsu算法过程如下:确定图像中最高的灰度级M,从1至M之间的每一个灰度级来作为阈值k,并分别计算目标与背景像素概率
通过Otsu算法得到的阈值还需要进行微调才能得到最佳阈值,否则会极大降低树干检测效率。为了快速确定最佳子集的阈值,面积、对称性以及面积长度比等难以通过先验知识确定阈值的特征采用Otsu算法来确定最佳阈值,而对于主方向、归一化表面模型(normalized Digital Surface Model,nDSM)等特征采用先验知识规则选取阈值。通过Otsu算法得到以下阈值:Area>40,Asymmetry>0.75,VDVI>0.75,Ratio of Green>0.34,Length>18。由于此次台风的风向为从西往东,则设置对象主方向阈值为45°~135°;树木倒伏后,树干与地面的高度应大于树干胸径,因此设置nDSM阈值0.1~1.5;实地调查得知该区域内的树木高度均高于2 m,则可设值两期DSM差值大于2 m。
3.3.4 基于RF分类器的树干信息检测
在传统的图像分类方法中,支持向量机(Support Vector Machine,SVM)和随机森林(Random Forest,RF)是最常见的两种分类方法。RF算法是一种包含多个决策树的机器学习算法[28]。每一棵决策树的训练数据集通过对原始数据集随机有放回的抽取获得,每个训练样本集的数据量约为原始样本数据集的63%。在每棵决策树生长的过程中,分裂节点的最佳特征子集通过基尼指数、信息增益为标准从原始的特征集合中获得, 当节点分裂达到事先定义的深度,或者节点上的样本无法再进行分类时停止节点分裂。每棵决策树单独完成分类后,由投票得出最终的分类结果。由于RF方法对不同对象类型具有较强的鲁棒性和有效性,且能够以较少的初始化参数得到较高的分类精度,因此这里采用RF分类方法。
为了提高树干检测效率,首先通过面积阈值剔除掉细小斑块,然后在影像上选取了22个树干样本,43个非树干样本。在样本训练时,选取了前文通过mRMR特征选择算法选取的前10个特征进行训练。
3.4 树干胸径估算
为了能够有效地为灾后清理工作提供指导,预估倒伏木的大小具有现实意义。对于同一树种,采用树干长度来预估树木大小是可行的。但研究区内部分树干被其他倒伏木树冠遮挡或阻断,因此,研究采用倒伏木树干胸径预估倒伏木的大小,其中树干胸径为树木主干1.3 m处的直径。在胸径测量位置的确定时,由于此次台风的风向为自西向东,因此,根据树干的倒伏方向来确定其树根点位置。
3.5 图像细化及树干线条提取
在分类过程中由于分割形状的不规则性,在边缘区域产生了一定程度的错分类,因此采用形态学闭合操作来剔除细碎斑块。为更加突出树干的线性特征,采用骨架算法消除树干直径对线条提取的影响。将提取的骨架线转化为矢量线条并进行平滑等后处理操作,由于倒伏木冠层对树干存在遮挡的情况,一棵树可能识别出多条线段。当树木发生倒伏后,倒伏树之间相互重叠,但相邻两树干之间还有存在一个树冠高度距离。通过影像上量测冠层高度均大于1.5 m。为避免树干信息的误提,当检测到的任意两条线段的其中一条线段的端点与另一线段的任意位置的距离小于1.5 m时,则被认为是一棵树,剔除较短的那一条线段。在矢量化的过程,采用八邻域追踪算法,树杈、枝干等影响因素导致检测出的树干线条具有较多毛刺。因此,在追踪过程中,当有至少两个方向可以继续向前追踪时,标记该点并沿着可前进方向继续追踪。在追踪结束后,不同的追踪方向可生成不同的树干线条,比较生成的矢量线条长度并只保留最长的树干线条。
3.6 精度分析
为了进一步评价提取结果的准确性,引入总体分类精度(Overall Accuracy,OA)、正确率(Percent Correct,PC)、漏检率(Omission Error,OE)和误检率(Commission Error,CE)来定量评价[29],其计算公式如下:
其中:
4 结果与分析
4.1 DSM及两期DSM差值提取分析
4.1.1 DSM提取分析
DSM及两期DSM的准确获取是倒伏木提取的关键。为了验证DSM的成图精度在研究区内均匀选取20个地面控制点。通过将实测控制点的高程与其对应的DSM上的高程值进行对比分析,计算相应误差。从图4中可以看出实测高程值与提取高程值相关性较高,其中R2达到了0.99,RMSE为0.15 m左右。
图4
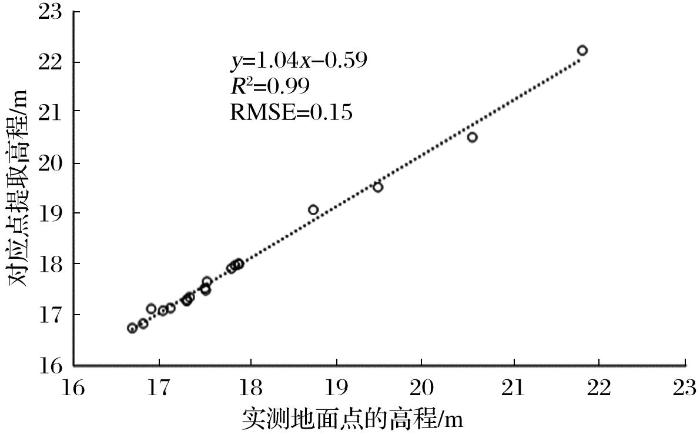
图4
控制点实测高程值与提取高程值关系图
Fig.4
The Relation between measured elevation value and extracted elevation value of control point
4.1.2 两期DSM差值提取分析
为了进一步验证两期DSM差值的准确性,在影像上分别选取了30个倒伏木树根位置点和14个地面点。其中,在倒伏木集中区域内,通过在台风过境后影像上量取的倒伏木树高值作为真实值,而对于地面区域认为其高程变化值为0 m,分别对应点的两期DSM差值进行对比分析,从图5中可以看出:在倒伏木集中区域内两者相关性较高,其中相关系数到达了0.99,R2为0.74。由于树木高度在3 m以上,而在两期DSM差值中,地面点高程变化在-1~1 m之间。由此可以看出树干与非树干在两期DSM差值影像存在较大差异,因此,采用两期DSM差值消除道路边缘、斑马线等干扰地物是可行的。
图5
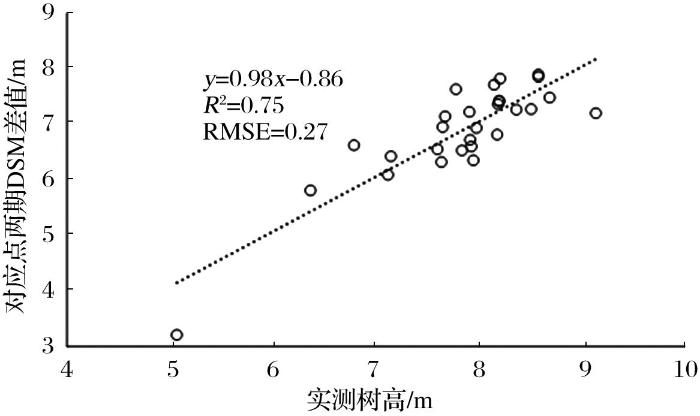
图5
实测树高与对应点DSM差值关系图
Fig.5
The relation between the measured tree height and DSM difference value of corresponding points
4.2 倒伏木大小估算
通过上文得到的实测胸径与提取胸径相关关系,可以得出,研究区内倒伏木胸径的平均值为0.45 m,其中最大和最小树干胸径分别为0.65 m、0.35 m。研究区内倒伏木胸径大小不一的主要原因为:①由于部分倒伏木树干被其他倒伏木树冠遮挡,导致所提取树干不是完整的树干,从而导致部分倒伏木胸径差异较大。②通过学校后勤部门提供的资料得知,研究区内的倒伏木大部分为2018年新移植树木,由于其根深较浅容易被大风刮到。为了验证提取树干胸径的准确性,以在影像量取的树干胸径作为真实值,与提取的树干胸径进行相关性分析。从图6中可知两者胸径相关性较高,R2达到了0.91,由此可以得出,采用提取的树干胸径来预估倒伏木的大小是可行的。
图6
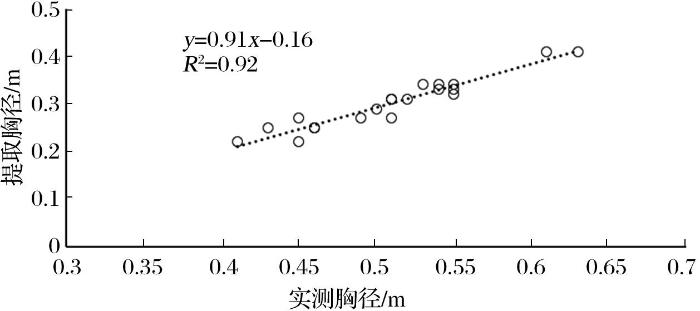
图6
实测胸径与提取胸径关系图
Fig.6
Relation diagram of Extract diameter at breast height and Measured diameter at breast height
4.3 基于阈值树干信息提取
根据实地调查与目视解译得到了试验区内台风倒伏木空间分布,统计试验区内倒伏木数量,发现共有63棵倒伏木。采用上文提出的方法在试验区进行实验,共提取出了71棵倒伏木,准确率为76.06%,误检率为26.99%,漏检率为14.28%。从图7(a)中可以看出,背景以草地为主的区域树干提取结果较好,但靠近道路、水泥地边缘的区域的树干存在一定的误检和漏检。通过影像对比分析,其中漏检部分主要为树干边缘像元以及DSM本身存在的高程误差导致树干与地面的高差被弱化;误检的部分主要为水泥地边缘和斑马线区域,主要有两个原因:①水泥地边缘和斑马线等地物的可见光波段光谱信息及形状与树干较为相似。②由道路边缘的路坎、花坛边缘具有一定高度,部分树干点与非树干点在nDSM上与树干混淆。通过以上分析可以得出,nDSM在影像质量较差的情况下对树干的检测难以发挥出其优势。
图7

图7
单时相与多时相提取结果图
Fig.7
The results of single - time and multi - time phase extraction
倒伏木树干与地面其他干扰地物在高程上虽存在差异,但DSM本身在高程上的误差,以及花坛边缘至地面高度和树干较为一致,通过nDSM难以有效剔除这些干扰地物。树木倒伏后,其树冠位置的高程发生了突变,而道路边缘、斑马线等在较短的时间内其高程不会有太大变化。因此在考虑采用两期DSM差值来剔除道路边缘斑马线等线状干扰地物。对比单期DSM提取结果图可以看出,加入两期DSM差值后,道路边缘线、斑马线等形状、光谱与树干较为相似的地物大部分都能够有效与树干区分开来。本次实验提取了58棵倒伏木,如图7(c),其中6棵误判为倒伏木,11棵为漏检,准确率达到了89.66%。由此可以看出,两期DSM差值对倒伏木树干检测具有显著的作用。
4.4 基于RF的树干信息提取
为了验证两期DSM差值在RF分类中是否仍存在显著作用,在样本训练时加入两期DSM差值特征,结果显示共检测到63棵倒伏木,其中准确率达到了87.30%,误检率和漏检率均为12.70%,如图7(d)。由此可以看出,对比基于单期影像分类结果,加入两期DSM差值特征后,其精度得到了明显的提升;而与基于两期影像的阈值分类结果相比,其精度并没有显著的变化。
由表2可知,通过单期影像倒伏木提取的正确率为76.06%,采用RF分类器其正确率增加了12.73%,但漏检率增加8%。而加入两期DSM差值后倒伏木提取正确率分别达到了89.66%和87.30%。对于漏检及误检情况,加入两期DSM差值后,采用RF分类器其漏检率降低了12.69%,而采用阈值分类的方法其误检率降低了17.47%。由此说明,基于单期无人机遥感影像基本能够提取出倒伏树木,但提取精度有限。
表2 精度评价结果表
Table 2
| 数据源 | 方法 | 提取 株数/棵 | 正提 株数/棵 | 遗漏 株数/棵 | 误判 株数/棵 | OA/% | PC/% | OE/% | CE/% |
|---|---|---|---|---|---|---|---|---|---|
| 单时相 | 阈值分类 | 71 | 54 | 9 | 17 | 63.38 | 76.06 | 14.28 | 26.99 |
| RF分类 | 53 | 47 | 16 | 6 | 58.49 | 88.79 | 25.39 | 9.52 | |
| 多时相 | 阈值分类 | 58 | 52 | 11 | 6 | 70.69 | 89.66 | 17.46 | 9.52 |
| RF分类 | 63 | 55 | 8 | 8 | 74.60 | 87.30 | 12.70 | 12.70 |
而通过多时相影像分析能够有效剔除在短时间内稳定的干扰地物,可以更加精确地提取出倒伏树木。
5 讨 论
5.1 与传统方法的比较
在城市区域中,由于道路边缘、斑马线等线状干扰地物在光谱、形状特征与倒伏木相似,这是倒伏木提取存在的常见问题。Lindbergand等[10,11]通过加入高度特征减少来自其他对象的干扰,然后使用模板匹配来提取倒伏,正确率分别为32%和38%。相似几何形状的物体的干扰以及数据源分辨率较低是提取精度较低的主要原因。汤剑雄等[18]基于高分辨率遥感影像结合树干的几何特征和光谱特征检测台风灾后倒伏木的树干,准确率较前者相比有了明显的提升。但道路边缘、屋顶等线状地物仍然无法有效的消除。而本研究采用树干的几何、光谱特征并结合树木倒伏前后的高程变化特征提取倒伏木,有效消除了线状地物的干扰,其准确率得到了较大提升,达到了89.66%。Windrim等[16,17]通过树木发生倒伏后的遥感影像对树干进行检测,其精度有限,因此分别基于单时相和多时相数据检测倒伏木,并对比分析了其检测精度。结果表明:单时相影像特征基本能够检测出倒伏木,多时相影像分析可以有效提高倒伏木的检测精度,为不同数据源情况下的倒伏木检测提供一种新途径。
5.2 可行性分析
就4种方法的时效性而言,基于单期影像阈值分类方法,阈值的确定是影响提取效率的重要因素;使用RF方法虽然比基于阈值的分类方法节省了确定阈值的时间,但分类过程需要足够的分类样本,且选取样本是一个耗时的工作;而基于两期影像的树干提取方法,虽然提取精度与基于单时相分类方法相比较高,但多时相数据源获取较为困难,且地面控制点的采集、两期影像的配准等工作耗时、耗力。因此,可以得出,当多时相数据难以获取、且没有足够的训练样本,采用单时相阈值分类虽然提取精度较低,但基本能够提取出倒伏木;当样本充足或已经建立倒伏木样本库时,基于单时相RF分类,能够快速地提高倒伏木检测效率和精度;当研究区有多时相数据但没有充足的训练样本,采用多时相阈值分类能够更好地满足行业需求。
6 结 论
研究以无人机遥感影像作为数据源,提出了一种高效、快速的台风倒伏木检测方法。主要得到以下结论:
(1)基于单期无人机遥感技术,基本可以实现台风灾后倒伏木的快速提取,但提取精度有限,准确率为76%左右。
(2)若研究区有多时相数据,通过多时相影像分析能够有效剔除在短时间内稳定的干扰地物,准确率提高了15%,可以更加精确地提取出倒伏木。
(3)采用多时相数据虽可以快速地提高精度,但多源数据获取困难,且地面控制点的采集、两期无人机影像的配准大大降低了倒伏木的提取效率。
(4)由于时间和试验条件的限制,研究过程还存在不足之处,此项研究内容主要基于无人机正射影像,并且需要借助台风过境前后两期无人机影像进行倒伏木树树的提取。近年来,深度学习广泛应用于目标识别[30],在下一步的研究过程中,尝试采用深度学习模型进行试验,以期采用单期无人机数据就能够快速、高效地提取倒伏木。
参考文献
Trend Analysis of Typhoon and Strom Surge Disaster on the South China Sea Coast of China
[J].
我国南海沿海台风及暴潮灾害趋势分析
[J].
Modeling Hurricane-caused Urban Forest Debris in Houston, Texas
[J].
Rapid Assessment of Change and Hurricane Impacts to Houston's Urban Forest Structure
[J].
A Tool for Rapid Post-hurricane Urban Tree Debris Estimates Using High Resolution Aerial Imagery
[J].
Forest Stem Volume Calculation Using Airborne LiDAR Data
[J].
Updating Residual Stem Volume Estimates Using ALS- and UAV-Acquired Stereo-Photogrammetric Point Clouds
[J].
Accurate Measurement of Individual Tree Position based on DBH Extraction of Terrestrial Laser Scanning, 2020,33(4):67-74.[梁晓军, 庞勇, 陈博伟. 基于地基激光雷达胸径提取的单木位置精确测量
[J].
Individual Tree Structure Parameters and Effective Crown of the Stand Extraction base on Airborn LiDAR Data
[J].
基于机载LiDAR的单木结构参数及林分有效冠的提取
[J].
Quantifying Sand Storage Capacity of Large Woody Debris on Beaches Using LiDAR
[J].
Detection of Lying Tree Stems from Airborne Laser Scanning Data Using a Line Template Matching Algorithm
[J].
Detection of Windthrown Trees Using Airborne Laser Scanning
[J].
High-resolution Airborne UAV Imagery to Assess Olive Tree Crown Parameters Using 3D Photo Reconstruction: Application in Breeding Trials
[J].
Short Communication. Using High Resolution UAV Imagery to Estimate Tree Variables in Pinus Pinea Plantation in Portugal
[J].
Fine Extraction of Tobacco based on UAV Images
[J].
基于无人机影像的烟草精细提取
[J].
Tree Height Quantification Using Very High Resolution Imagery Acquired from an Unmanned Aerial Vehicle (UAV) and Automatic 3D Photo-Reconstruction Methods
[J].
Automated Mapping of Woody Debris over Harvested Forest Plantations Using UAVs, High-Resolution Imagery, and Machine Learning
[J].
A Novel Approach for Coarse-to-Fine Windthrown Tree Extraction based on Unmanned Aerial Vehicle Images
[J].
Assessing The Damage Caused by Urban Green Space Ecosystem Service based on UAV Remote Sensing
[J].
基于无人机遥感的台风对城市树木生态系统服务的损失评估
[J].
Discussion on Key Technology and Application of UAV Survey Data Processing
[J].
Palmprint Recognition based on Highpass Filter and Principle Components, Character of LBP
[J].
基于高通滤波及LBP主成分特征的一种掌纹识别方法
[J].
The Principal Component Analysis for RS Image Processing
[J].
主成分分析在遥感图像处理中的应用
[J].
Feature Selection based on Maximal Mutual Information Criterion in Object-Oriented Classification
[J].
面向对象影像分类中基于最大化互信息的特征选择
[J].
Methodological Research on Road Extraction based on Characteristics of Road Greenbelts in Remotely Sensed Imagery
[J].
基于道路绿地特征的遥感影像道路信息提取方法研究
[J].
Image Matching Algorithm based on Elliptic Metric Spectral Feature
[J].
基于椭圆形度量谱特征的图像匹配算法
[J].
Study on the Extraction and Applications of Spectral Feature in Hyperspectral Remote Sensing
[J].
高光谱遥感数据光谱特征的提取与应用
[J].
Extraction of Vegetation Information from Visible Unmanned Aerial Vehicle Images
[J].
基于可见光波段无人机遥感的植被信息提取
[J].
Optimal Segmentation of Brain MRI based on Adaptive Bacterial Foraging Algorithm
[J].
Kiwifruit Orchard Mapping based on Wavelet Textures and Random Forest
[J].
基于小波纹理和随机森林的猕猴桃果园遥感提取
[J].
Counting Tree Number in Subtropical Districts based on UAV Remote Sensing Image
[J].
基于无人机遥感的亚热带森林林分株数提取
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}