1 引 言
目前我国面临日益严峻的海洋安全环境与形势,为了维护领海和主权的完整,增强维护国家海洋权益与海洋安全的能力,需要对海面目标进行快速、宽刈幅、大面积的监测与保障。目前传统的岸基雷达辐射距离近,舰载、机载雷达行进路线受限,难以对我国远海进行有效的监测。星载雷达具有全天候和全球覆盖的优点,能够监视全球地区和目标[1 ] 。以南海为例,要想在卫星过境时对其进行全面监测,需要散射计扫描刈幅超过2 000 km,要准确发现和定位观测舰船目标,需要分辨率保持在1 km数量级。
目前全球范围内已经建立了多个船舶遥感探测和监视系统,包括美国NASA的AKDEMO、英国QinetiQ公司的MaST、挪威FFI公司的Eldhuset、加拿大Satlantic公司的OMW、英国QinetiQ公司的MAST、挪威Kongsberg公司的MeosView、法国Kerguelen的CLS和法国BOOST公司的BOOST船舶遥感探测系统等,主要处理方法是基于SAR数据的恒虚警(Constant False Alarm Rate, CFAR)检测算法[2 ] 。
虽然SAR卫星数据分辨率较高,是目前舰船检测的主要数据源,但扫描幅宽受限。例如目前在轨的GF-3卫星最大刈幅宽度650 km,Radarsat-2卫星最大刈幅宽度500 km,Sentinel-1卫星最大刈幅宽度400 km[3 ] ,均不能满足应用需求。对于真实孔径雷达来说,幅宽在大于2 000 km时,方位向分辨率在几十公里量级,无法对目标进行方位高分辨和准确定位[4 ] 。因此散射计设计来说,在保证刈幅宽度的同时,提高方位分辨率,就成了散射计发展新的需求[5 -6 ] 。
雷达目标识别是随着雷达探测技术和信息处理技术的进步而发展出来的崭新技术[7 ] ,包括使用高分辨距离像(High Resolution Range Profile,HRRP)开展目标识别研究。目前已有使用实测海面舰船HRRP数据进行舰船识别分类的研究[8 ] ,该研究数据表明使用10类舰船(包括军船和民船)的实测HRRP数据测试情况下,平均正确识别率可以达到80%以上,因此可通过使用高分辨距离像目标识别技术来提高星载散射计对海面舰船目标的检测能力。
针对全天候、全球覆盖的海面舰船目标检测的需求[9 -10 ] ,提出了一种基于星载宽刈幅散射计海面舰船目标检测方法,该方法使用扇形波束旋转扫描散射计,发射宽带线性调频信号,首先对接收到的回波信号进行方位高分辨,使方位分辨率达到1 km以下,实现对海面舰船目标的分离,然后进行海面舰船目标检测,得到不同方位角下多次观测信息,提取舰船信号,通过多普勒频率、高分辨距离像等观测数据,计算舰船长度、与散射计运动方向夹角,对舰船类型进行初步分类识别,实现辅助检测功能。
2 数据与研究区
2.1 数据源
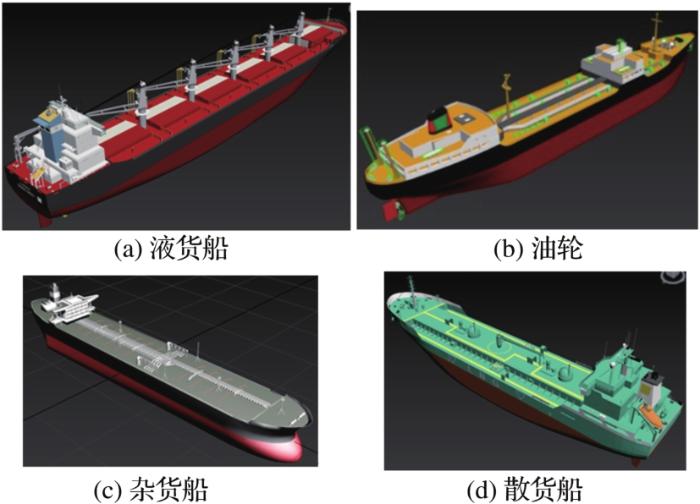
实验的研究对象为海面舰船,首先给出了4艘舰船的3D模型,如图1 所示,结合散射计发射信号和观测几何模型,通过扫频扫角的方式生成舰船回波信号,用作舰船目标检测的输入信号。
图1
图1
4种舰船模型仿真示意图
Fig.1
Simulation diagram of four ship models
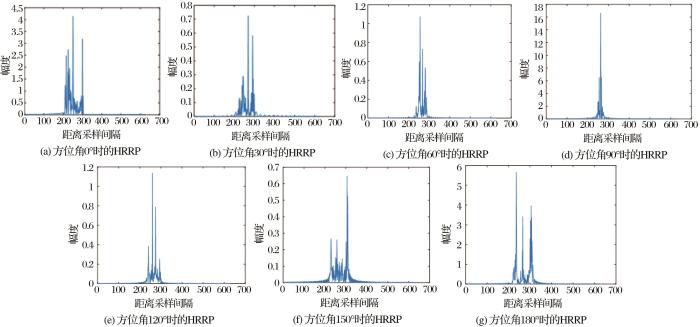
根据散射计系统参数设计,方位分辨率在百米左右,对回波信号处理后,舰船信息主要表现为距离向上,利用距离像进行分类识别,因此对海面舰船在不同方位角下的高分辨距离像(HRRP)进行了仿真,仿真参数为:入射角40°,距离分辨率0.3 m,仿真方位角范围为0°~360°,仿真间隔为1°。以液货船为例,图2 给出了液货船在多个不同方位角的高分辨距离像。
图2
图2
液货船在各方位角时的高分辨距离像
Fig.2
HRRP of tanker at different azimuth angles
2.2 散射计介绍
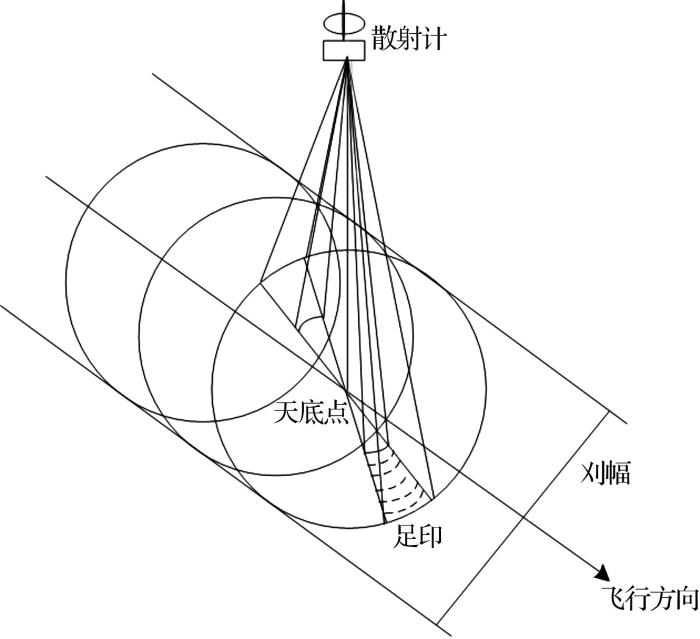
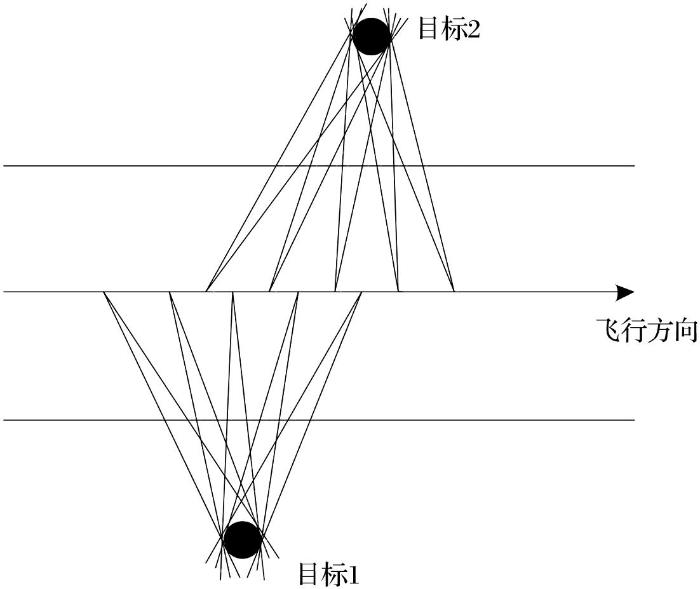
实验的处理范围为宽刈幅(>2 000 km)的海面,为了扩大散射计的扫描区域,通过低轨道高度和大入射角保证刈幅宽度,通过采用扇形波束旋转扫描体制实现对海面的大面积覆盖,散射计观测几何如图3 所示。散射计在扫描过程中,可对同一目标进行多次观测,得到不同方位角下的多次观测信息,散射计旋转扫描观测示意图如图4 所示。
图3
图3
散射计观测几何
Fig.3
Scatterometer observation geometry
图4
图4
散射计旋转扫描观测示意图
Fig.4
Diagram of scatterometer rotation scanning observation
3 研究方法
3.1 概述
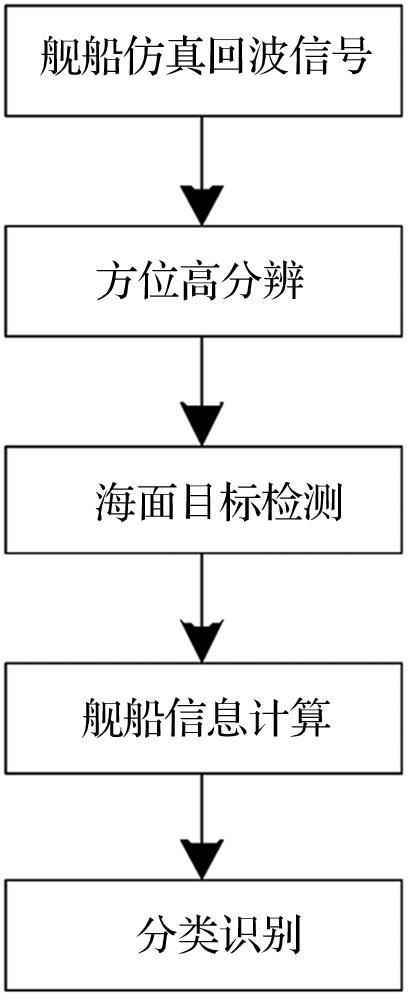
散射计接收到目标回波后,首先进行方位向高分辨,保证海面航行的舰船分布在不同方位分辨单元内,每一方位单元内只有一艘舰船,通过海面目标检测判断舰船目标有无,通过对目标多次扫描得到多种回波信息,计算舰船信息,如船长、船速、与卫星运动方向夹角,最后根据高分辨距离像对目标进行分类识别,算法流程图如图5 所示。
图5
图5
算法流程图
Fig.5
Algorithm overview
3.2 方位高分辨
3.2.1 极坐标格式算法信号模型
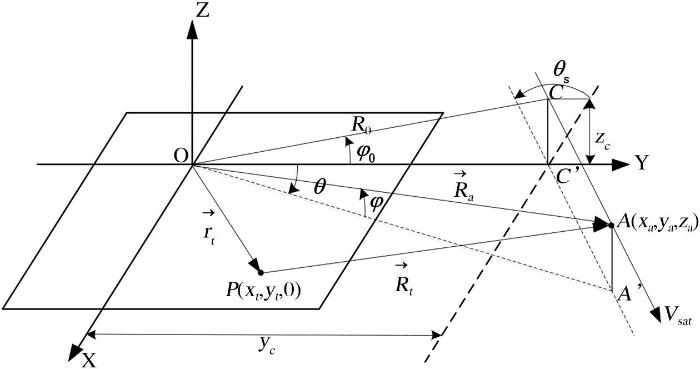
散射计在地面的足印方位向可达几十公里,无法有效将足印内的多艘舰船区分开,需要提高方位分辨率,保证舰船可以分布在不同方位单元内。由于散射计进行环扫观测,采用极坐标格式(Polar Format Algorithm)算法进行方位高分辨,图6 为以点目标为例,展示算法的几何模型。
图6
图6
极坐标格式算法几何模型
Fig.6
Geometric model of PFA algorithm
假设散射计以速度v水平匀速直线飞行。定义场景中心O 为坐标原点,视线方向地面投影定义为Y 轴。不失一般性,设散射计工作在斜视模式,斜视角为θ s θ s = 0 x a , y a , z a y c z c θ φ φ 0 P ,其位置矢量为r t ⃗ x a y a R a ⃗ R t ⃗ R a R t
R a = x a 2 + y a 2 + z a 2 (1)
R t = ( x a - x t ) 2 + ( y a - y t ) 2 + z a 2 (2)
s τ = r e c t ( τ T r ) ∙ e x p ( j π k τ 2 ) ∙ e x p ( j 2 π f c τ ) (3)
其中:τ T r k 为信号调频率,f c B = k T r
S t , τ = ∑ i = 1 q A i r e c t ( t - 2 R i / c T a ) ∙ r e c t ( f r k T r ) ∙ e x p ( - j π k ( τ - 2 R i / c ) 2 ) ∙ e x p [ - j 4 π f c c R i ] (4)
其中:τ T r k 为信号线性调频斜率,f c B = k T r c 为电波传播速度,t 为方位慢时间,T a q 为散射点总数,A i i 的后向散射系数,R i i 与散射计的距离。
采用Dechirp模式接收,点目标回波信号可以表示为:
S t , τ = r e c t ( t T a ) ∙ r e c t ( τ - 2 R t / c T r ) ∙ e x p ( - j π k ( τ - 2 R t / c ) 2 ) ∙ e x p [ - j 4 π f c c R t ] (5)
其中:c 为光速,t 为方位慢时间,T a
利用驻留相位原理,对上式做距离向傅立叶变换,得到:
S t , f τ = r e c t ( t T a ) ∙ r e c t ( f r k T r ) ∙ e x p ( - j π f τ 2 k ) ∙ e x p [ - j 4 π c ( f c + f τ ) R t ] (6)
对回波数据进行匹配滤波和运动补偿,使场景中心点回波相位为零,即对上式乘以如下参考函数:
S r e f t , f τ = e x p ( j π f τ 2 k ) ∙ e x p [ j 4 π c ( f c + f τ ) R a ] (7)
S B t , f r = S t , f r ∙ S r e f t , f r (8)
= r e c t ( t T a ) ∙ r e c t ( f r k T r ) ∙ e x p [ j 4 π c f c + f τ ( R a - R t ) ]
在平面波前假设条件下,差分距离R a - R t
R a - R t ≈ r t ⃗ ∙ R a ⃗ R a = x t c o s φ s i n θ + y t c o s φ c o s θ (9)
S B t , f r = e x p { j x t 4 π c f c + f τ c o s φ s i n θ + y t 4 π c f c + f τ c o s φ c o s θ } (10)
3.2.2 算法介绍
极坐标格式算法处理包括极坐标格式重采样和二维傅立叶变换实现,极坐标格式重采样通过距离向插值和方位向插值实现。距离向插值将极坐标格式数据转换成keystone格式数据,方位向插值将keystone格式数据转换成矩阵格式的采样数据。
B d ≈ 2 v s i n ϕ s i n α λ ∙ ∆ α (11)
距离向插值首先对式(10)在距离向做如下尺度变换:
f τ = f c δ r - 1 + δ r f τ , (12)
其中:δ r = c o s φ 0 c o s φ c o s θ f τ , f τ
S R t , f r = S B t , f c δ r - 1 + δ r f τ (13)
= e x p { j x t 4 π c f c + f τ c o s φ 0 t a n θ + y t 4 π c f c + f τ c o s φ 0 }
做距离向傅立叶变换,得到距离向插值后的目标距离徙动曲线为:
R C M R t = y t c o s φ 0 + x t c o s φ 0 t a n θ (14)
其中 t a n θ = x a y a = v t c o s ( θ s ) y c + v t s i n ( θ s ) (15)
将式(15)代入式(14),并做泰勒展开,得到距离徙动可表示为:
R C M R t = y t c o s φ 0 + x t c o s φ 0 c o s θ s Ω t - 1 2 x t c o s φ 0 s i n 2 θ s Ω 2 t 2 + o ( t 3 ) (16)
但是斜视条件下方位位置变量x t
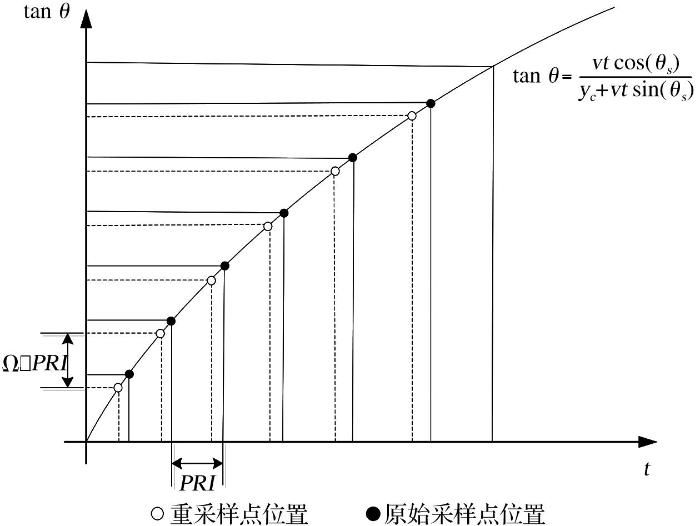
方位向插值分两步实现,首先做与距离频率无关的脉冲域重采样,使t a n θ 图7 所示。这一过程,在数学上等效于对式(13)做如下变量替换:
t a n θ = Ω ' t (17)
图7
图7
方位重采样示意图
Fig.7
Diagram of azimuth resampling
其中:Ω ' = Ω c o s θ s
S L t , f r = e x p { j x t 4 π c f c + f τ c o s φ 0 c o s θ s Ω t + y t 4 π c f c + f τ c o s φ 0 (18)
R C M L t = y t c o s φ 0 + x t c o s φ 0 c o s θ s Ω t (19)
方位脉冲域重采样使二次及高次距离弯曲得到完全校正,只剩下线性距离走动。这一残留线性距离走动再通过keystone变换得到校正,即:
t = f c f c + f τ t ' (20)
其中:t '
S K T t , f τ = S L f c f c + f τ t , f τ (21)
= e x p ( j 4 π λ y t c o s φ 0 ) ∙ e x p [ j 4 π c c o s φ 0 ( x t f c c o s θ s Ω t + y t f τ ) ]
R C M K T t = y t c o s φ 0 (22)
可以看出,经过keystone变换后,残留的距离走动得到校正,信号二维解耦合完成。
F S K T t , f τ = e x p ( j 4 π λ y t c o s φ 0 ) ∙ s i n c a ( f t - 2 Ω c o s φ 0 c o s θ s λ x t ) ∙ s i n c r ( τ - 2 c o s φ 0 c y t ) (23)
其中:F代表两维傅立叶变换,s i n c a x = s i n c 2 ρ a ∙ π x / π x s i n c r x = s i n c 2 Ω ρ r ∙ π x / π x ρ a ρ r
f x , y = e x p ( j 4 π λ y t c o s φ 0 ) ∙ s i n c a [ 2 Ω c o s φ 0 c o s θ s λ x - x t ] ∙ s i n c r [ 2 c o s φ 0 c y - y t ] (24)
其中:x = λ f t 2 Ω c o s φ 0 c o s θ s y = c τ 2 c o s φ 0
3.3 海面目标检测
3.3.1 恒虚警检测
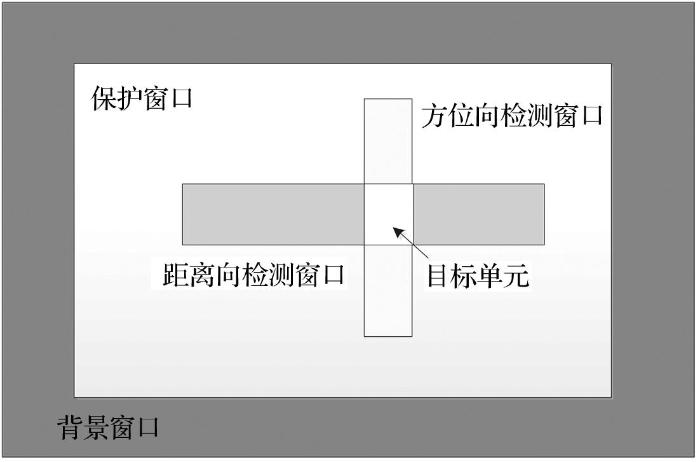
散射计回波信号在方位高分辨处理后,需要在距离向、方位向进行检测,以消除海杂波、距离旁瓣、方位旁瓣的影响,检测到正确的舰船信号,并得到舰船在此方位角下的高分辨距离像。检测方法首先采用单元平均CA方法在距离向和方位向进行二维恒虚警检测,如图8 所示。
图8
图8
恒虚警检测示意图
Fig.8
Diagram of CFAR detection
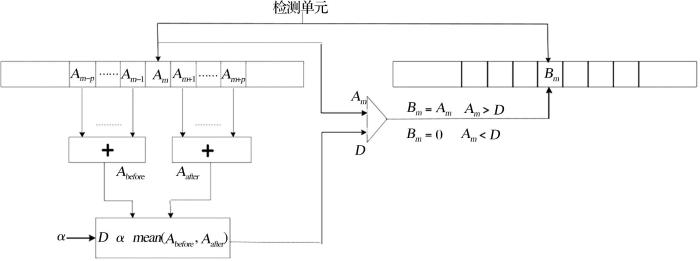
恒虚警检测算法的示意图如图9 所示,通过恒虚警概率P f a T C A 式(25)所示,p为一侧检测单元个数。
P f a = ( 1 + T C A ) - 2 p (25)
图9
图9
恒虚警检测算法示意图
Fig.9
Diagram of CFAR algorithm
S C A - C F A R = T C A ∙ [ ∑ i = m - p m - 1 A i , ∑ i = m + 1 m + p A i ] 2 (26)
如果目标单元信号大于运算检测门限则发现目标,否则目标不能被发现。
3.3.2 自适应门限检测
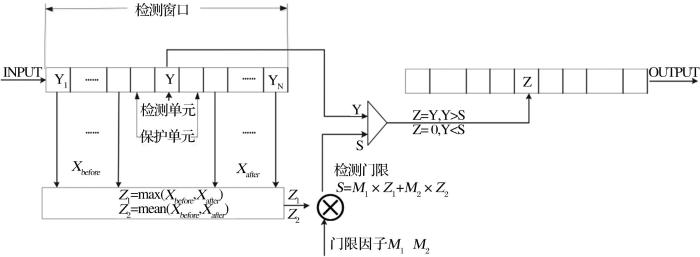
舰船信号在恒虚警检测之后,需在距离向上进行自适应门限检测,在保留舰船散射点回波特征的同时去除噪声,图10 为自适应门限检测示意图。
图10
图10
自适应门限检测示意图
Fig.10
Diagram of adaptive threshold detection
如图10 所示,取检测窗口为N 个距离单元,能够基本涵盖舰船长度。检测单元的两侧设置保护单元,取保护单元两侧数据X b e f o r e X a f t e r Z 1 M 1 X b e f o r e X a f t e r Z 2 M 2 S 等于Z 1 Z 2
3.4 舰船分类识别
散射计在检测舰船回波信号的过程中,进行了多次观测,获得了多个不同方位角下的信息,如多普勒频率,高分辨距离像等,为计算船长、船速、与卫星运动方向夹角等舰船信息提供了条件,为建立舰船目标库、初步分类识别打下了基础。
3.4.1 舰船信息计算
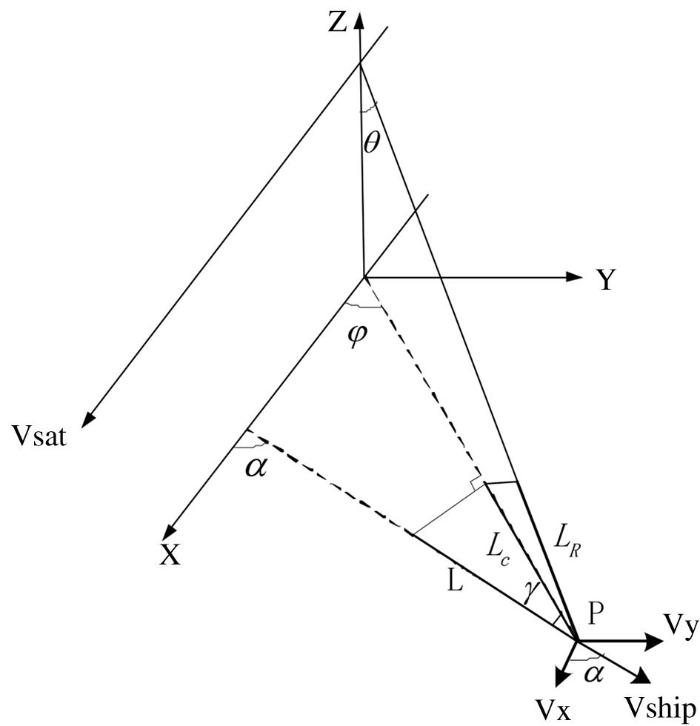
如图11 所示,散射计飞行速度为V s a t θ φ V s h i p α V x V y L ,通过回波信号测得舰船长度为L R L c γ
图11
图11
舰船运动模型示意图
Fig.11
Diagram of ship motion
根据扇形波束微波散射计与目标相对位置关系得到散射计到舰船的入射方向单位矢量表达式n ⃗ i n c i d e n t
n ⃗ i n c i d e n t = ( s i n θ c o s φ , s i n θ s i n φ , - c o s φ ) (27)
V R = V ⃗ s a t ∙ n ⃗ i n c i d e n t + V ⃗ s h i p ∙ ( - n ⃗ i n c i d e n t ) (28)
f d = 2 V R λ = 2 s i n θ [ V s a t - V x c o s φ - V y s i n φ ] λ (29)
散射计在某方位角φ L R f d τ Φ
如图4 所示,散射计采用扇形波束旋转扫描观测海面舰船,这就为同一目标多次观测创造了条件,合理设置系统参数,实现对同一目标的多次观测。
当散射计在不同方位对目标观测2次后,可得到两次干涉相位差Φ 1 Φ 2
Φ 1 = 2 π f d 1 τ (30)
Φ 2 = 2 π f d 2 τ (31)
根据两次干涉相位差Φ 1 、 Φ 2 φ 1 、 φ 2 V x V y
V x = V s a t - λ 4 π s i n θ s i n ( φ 1 - φ 2 ) τ ( Φ 2 s i n φ 1 - Φ 1 s i n φ 2 ) (32)
V y = λ 4 π s i n θ s i n ( φ 1 - φ 2 ) τ ( Φ 2 c o s φ 1 - Φ 1 c o s φ 2 ) (33)
V s h i p = V x 2 + V y 2 (34)
根据舰船在顺轨和交轨方向的速度,计算舰船速度V α
α = a r c t a n ( V y V x ) (35)
设定船长检测门限d ,天线方位角为φ B 1 B M B m > d P r P 1 P R L R
L R = ( P R - P 1 ) × c 2 f s (36)
d = μ × ∑ i = 1 M B i 2 / M (37)
根据舰船在回波方向上的投影长度L R L c
L c = L R s i n θ (38)
计算船长在地面的投影长度L c γ
γ = α - φ (39)
其中:φ L R H 对应的观测方位角。
根据船长在地面的投影长度L c L
L = L c c o s γ (40)
3.4.2 分类识别
在完成对目标辅助信息的计算后,可以结合舰船AIS信息此型号舰船的将不同方位角度下的高分辨距离像、船长、航速等信息保留下来,建立目标库,对未知舰船进行目标识别。
目前基于星载雷达实测到的舰船目标高分辨距离像数据很少,无法建立舰船全方位角目标库,因此采用仿真的目标库来做识别。识别方法采用最大相关系数法。
最大相关系数法是以目标多方位角下高分辨距离像目标库为基础,将待识别的舰船目标高分辨距离像与多方位角目标库内的已有距离像相关匹配,按最大相关系数准则做判决的方法。
设测得的目标像为p ,目标库内的像为S i
C p , S i = m a x { ∑ i = 1 N + m p i S i ( i + m ) } ∑ i = 1 N p 2 ( i ) ∑ i = 1 N S i 2 ( i ) (41)
相关系数的大小反映了参与相关运算的两波形形状的相似程度,相关系数最大的判为同类目标。
4 结果与分析区
4.1 舰船检测结果
为了验证算法对海面舰船目标检测的性能,采用仿真数据进行验证。首先给出了散射计仿真系统参数,如表1 所示。通过系统设计,使得方位分辨率在不同方位角均保持在1 km以下,因此假设同一方位分辨单元中只有一艘舰船存在。
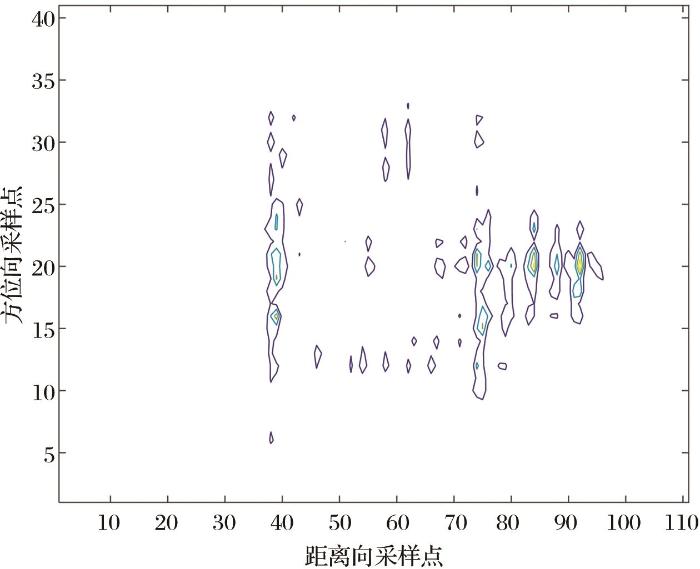
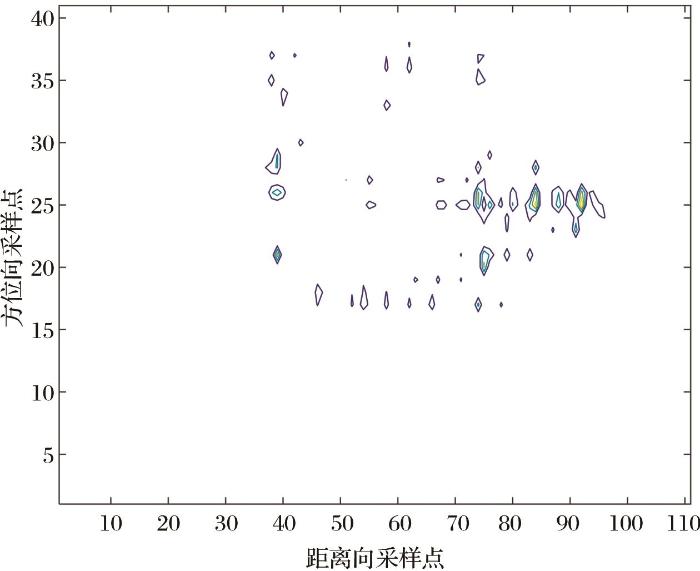
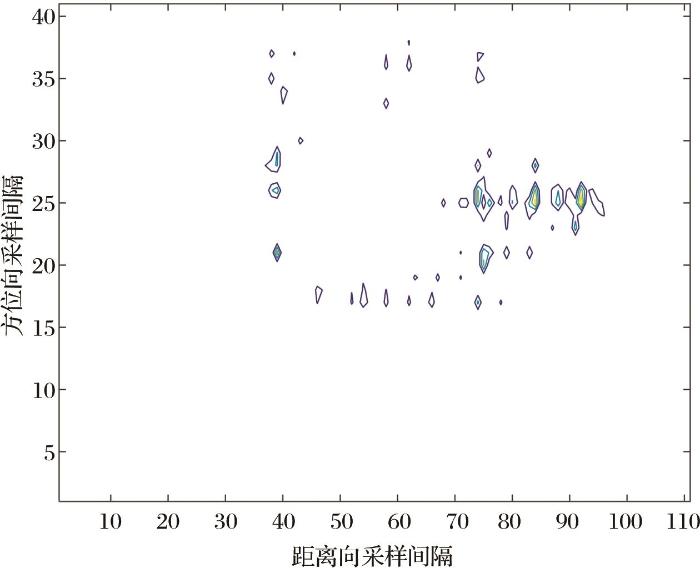
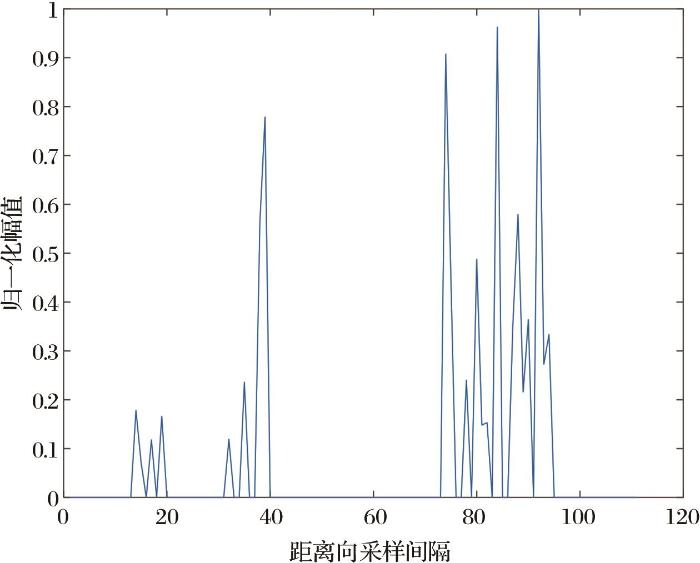
以液货船为例,散射计发射宽带线性调频信号,接收此液货船RCS仿真模型反射信号,经脉冲压缩和方位高分辨处理后,得到舰船回波方位高分辨处理结果,如图12 所示,在方位向上能够将海面舰船分隔开来,接着进行海面二维恒虚警检测和自适应门限检测去除海杂波、旁瓣的影响,结果如图13 、图14 所示,最后取舰船所在方位单元,得到舰船高分辨距离像,如图15 所示。
图12
图12
舰船方位高分辨结果
Fig.12
Result of azimuth high resolution
图13
图13
二维恒虚警检测结果
Fig.13
Result of 2D CFAR
图14
图14
自适应门限检测结果
Fig.14
Result of adaptive threshold detection
图15
图15
舰船高分辨距离像
Fig.15
HRRP of ship
为了验证舰船辅助信息计算方法的准确性,结合表1 所示散射计参数,对已有的4艘舰船仿真的高分辨距离像分别计算舰船辅助信息。假设散射计第一次扫描到舰船目标的方位角为45°,第二次观测方位角为135°,舰船运动速度1.8 km/h,观测时延τ 表2 所示。
图2 列举出了液货船在多个方位角下的高分辨距离像(HRRP),由于仿真的舰船高分辨距离像没有噪声,在进行分类识别时对其加入SNR=20 dB的噪声,将某个舰船在每一个方位下的HRRP分别与目标库内所有HRRP求相关系数,相关系数小于某一门限值的判为目标库内无同类舰船,实验拒判门限值为75%,相关系数最大的判为同类舰船,表3 给出了最大相关法分类识别的结果。
4.2 结果分析
通过上述仿真结果可以看到,首先,液货船方位高分辨的结果能够将RCS仿真模型中的主要散射点信息集中在同一方位单元内,在进行2维恒虚警检测和自适应门限检测后,滤除了部分旁瓣和海杂波,通过提取舰船所在方位的高分辨距离像,可以看到舰船散射点的主要信息得到保留。其次,舰船辅助信息计算的准确性较好,但受限于船速与卫星方向的夹角,方位夹角在[65°~115°]之间的舰船信息被舍弃。最后,分类识别的结果表现良好,但目标库内的船只种类太少,使用最大相关法就可以进行分类识别,在目标库内的舰船种类增多后,需使用更成熟的识别算法进行分类。
5 讨 论
5.1 海面舰船检测的技术重点
星载宽刈幅散射计海面目标探测的技术重点存在以下3个方面:①散射计的设计,目前现有散射计大多为真实孔径散射计,分辨率最高为12.5 km,要满足方位高分辨的要求需要使用合成孔径散射计,目前旋转扫描合成孔径散射计目前已在机载模式下实现;②除了在交轨方向,顺轨方向也要进行方位高分辨,扩大高分辨在各方位角的实现,是扩大舰船信息获取范围的重要因素;③提取海面舰船的信息是非常困难的,海面舰船种类繁多,大小不一,很容易和海杂波混淆,目前在轨运行的散射计即便可以检测到大型舰船,也不能够准确区分舰船和海杂波、旁瓣,这也限制了散射计检测舰船技术的发展。
5.2 使用实测数据开展舰船检测算法研究
在系统仿真和算法开发阶段基本完成后,需要使用实测数据对算法进行进一步验证和完善。例如,使用目前在轨散射计的数据,结合舰船AIS数据采集同时空下的回波信号,提取散射计回波中的舰船信号,进行检测,计算辅助信息,保留高分辨距离像,建立舰船目标库;使用岸基雷达采集的舰船高分辨距离像,建立岸基目标库,通过星载散射计运动和扫描模型对其进行相应转换,最后使用目标识别算法进行目标分类;使用SAR卫星处理得到的舰船2维图像,转换成不同方位角下的舰船高分辨距离像,建立目标库并开展分类识别处理。
6 结 论
提出了一种基于星载宽刈幅散射计的海面舰船目标检测方法,通过对舰船回波信号进行方位高分辨,海面目标二维检测,得到多次舰船观测信息,计算船长,船速,与卫星运动方向夹角,并通过高分辨距离像对舰船类型进行初步分类识别。仿真结果表明,该方法能够对实现宽刈幅海面上的舰船目标检测,并得到有效的舰船信息。
实时监测上千公里刈幅的海面舰船是星载雷达发展的一个重要方向,实验对宽刈幅海面舰船的检测和识别进行了初步探索,验证了星载宽刈幅散射计海面舰船目标检测的可行性,未来仍需要开展大量工作,在方位高分辨和舰船分类识别方面开展进一步研究。
参考文献
View Option
[1]
Merrill I Radar Handbook [M]. Beijing : Publishing House Of Electronics Industry , 2010 .
[本文引用: 1]
Merrill I 雷达手册 [M].北京 :电子工业出版社 ,2010 .
[本文引用: 1]
[2]
Wang Chao Zhang Hong Wu Fan et al Review on Power System Transient Stability Control Technologies based on PMU/WAMS [M]. Beijing : Science Press ,2013 .王超,张红,吴樊,等,高分辨率SAR图像舰船目标检测与分类
[M].北京 :科学出版社 ,2013.
[本文引用: 1]
[3]
Zhang Qingjun System Design and Key Technologies of the GF- Satellite
[J]. Acta Geodaetica et Cartographica Sinica ,2017 ,46 (3 ):269 -277 .
[本文引用: 1]
[张庆君,高分三号卫星总体设计与关键技术
[J].测绘学报 ,2017 ,46 (3 ):269 -277 .
[本文引用: 1]
[4]
Leopold L J C Space-based Radar Handbook
[M]. Beijing ,Publishing House of Electronics Industry , 2005 .Leopold L J C.星载雷达手册[M].北京 :电子工业出版社 ,2005.
[本文引用: 1]
[5]
Wang Gang Dong Xiaolong Zhu Di High Resolution Implementation based on Scanning Spaceborne Radar
[J]. Remote Sensing Technology and Application ,2017 ,32 (6 ):1071 -1077 .
[本文引用: 1]
[王刚,董晓龙,朱迪,基于星载旋转扫描雷达的高分辨率实现
[J].遥感技术与应用 ,2017 ,32 (6 ):1071 -1077 .
[本文引用: 1]
[6]
Liu Liling High Azimuth-Resolution Processing of Spaceborne Scanning Mirowave Scatterometr
[D]. Beijing : National Space Science Center,Chinese Academy of Sciences ,2017 .
[本文引用: 1]
刘丽玲 星载扫描微波散射计方位向高分辨处理方法研究
[D].北京 :中国科学院国家空间科学中心 ,2017 .
[本文引用: 1]
[7]
Zhuang Zhaowen Wang Xusong Li Xiang et al Radar Target Recognition
[M].Beijing : Higher Education Press ,2014 .庄钊文 ,王雪松,黎湘,等 .雷达目标识别[M].北京 :高等教育出版社 ,2014.
[本文引用: 1]
[8]
Wei Cunwei Liu Xiankang Sun Fei et al A Method of Ship Target Recognition based on HRRP
[J]. Electronic Science ,2017 ,30 (11 ):13 -16 .
[本文引用: 1]
魏存伟,刘先康, 孙菲,
等 电子科技 ,2017 ,30 (11 ):13 -16 .
[本文引用: 1]
[9]
Lin Mingsen He Xianqiang Jia Yongjun et al Advances in Marine Satellite Remote Sensing Technology in China
[J]. Haiyang Xuebao , 2019 , 41 (10 ):99 -112 .
[本文引用: 1]
林明森 ,何贤强 ,贾永君 ,等 中国海洋卫星遥感技术进展海洋卫星应用遥感技术进展
[J].海洋学报 ,2019 , 41 (10 ):99 -112 .
[本文引用: 1]
[10]
Lin Youquan Spaceborne Radar Systems for Ocean Surveillance
[J]. Modern Radar , 2012 ,34 (11 ):6 -10 .
[本文引用: 1]
[林幼权,星载海洋监视雷达系统
[J].现代雷达 , 2012 ,34 (11 ):6 -10 .
[本文引用: 1]
[11]
Keith W Robert T Simon W Sea Clutter: Scattering, the K Distribution and Radar Performance [M]. Beijing :Publishing House of Electronics Industry , 2016 .Keith Ward, Robert Tough, Simon Watts
.海杂波:散射、K分布和雷达性能[M].北京 :电子工业出版社 ,2016.
[12]
Mao Xinhua Study on the Application of PFA in SAR Ultra-high Resolution Imaging and SAR/GMTI
[D].Nanjing :Nanjing University of Aeronautics and Stronautics The Graduate School ,2009 .
毛新华 PFA在SAR超高分辨率成像和SAR/GMTI中的应用研究
[D].南京 :南京航空航天大学 ,2009 .
[13]
Lin Wenming Study on Spaceborne Rotating, Range-gated, Fanbeam Scatterometer System
[D]. Beijing :Graduate University Chinese Academy of Sciences ,2011 .
林文明 星载扇形波束扫描微波散射计系统研究
[D].北京 :中国科学院研究生院 ,2011 .
[14]
Xu Cheng bin Zhou Wei Cong Yu et al Ship Analysis and Detection in High-resolution PolSAR Imagery based on Peak Zone
[J].Journal of Radars , 2014 ,4 (8 ):367 -373 .
许成斌,周伟,丛瑜
等 雷达学报 ,2014 ,4 (8 ):367 -373 .
[15]
Zhang Feng li Zhang Lei Wu Bingfang Process of Ship Detection Technology and System based on Remote Sensing Technology in European Union
[J]. Journal of Remote Sensing , 2007 ,11 (4 ):552 -562 .
张风丽,张磊,吴炳方,欧盟船舶遥感探测技术与系统研究的进展
[J].遥感学报 ,2007 ,11 (4 ):552 -562 .
[16]
He Zi Chen Rushan Study on Efficient High Frequency Method of Electromagnetic Scattering from Ship above Sea Surface
[J]. Journal of Radars , 2019 ,8 (3 ):319 -325 .
何姿 ,陈如山 三维随机粗糙海面与舰船的复合电磁特性的高频方法分析研究
[J].雷达学报 ,2019 ,8 (3 ):319 -325 .
[17]
Li Qing Li Bin Hu Wenjun et al Ship Target Classification based on the Low Bandwidth Marine Radar
[J]. Modern Radar , 2012 ,34 (12 ): 45 -49 .
[李青,李斌,胡文俊
等 现代雷达 ,2014 ,34 (12 ):45 -49 .
[18]
Sun Mingzhu Jia Li Wu ling Usability Analysis of High-resolution SAR Satellite Image Ship Target Recognition
[J].Journal of Jiamusi University(Natural Science Edition) ,2021 ,39 (1 ):131 -133 .
孙明珠 ,贾丽 ,吴翎 高分辨率SAR卫星图像舰船目标识别可用性分析
[J]佳木斯大学学报(自然科学版) ,2021 ,39 (1 ):131 -133 .
[19]
Song Penghan Xin Huaisheng Liu Nannan Ship Targets Recognition based on Deep Learning Multi-source Feature Fusion
[J].Journal of CAEIT ,2021 ,16 (2 ):127 -133 .
宋鹏汉 ,辛怀声 ,刘楠楠 基于深度学习的海上舰船目标多源特征融合识别
[J].中国电子科学研究院学报 ,2021 ,16 (2 ):127 -133 .
[20]
Wang Xiaodi Ship Target Recognition based on Remote Sensing Information
[J].Ship Science and Technology ,2020 ,42 (24 ):82 -84 .
王晓迪 基于遥感信息的舰船目标识别
[J].舰船科学技术 ,2020 ,42 (24 ):82 -84 .
1
2010
... 目前我国面临日益严峻的海洋安全环境与形势,为了维护领海和主权的完整,增强维护国家海洋权益与海洋安全的能力,需要对海面目标进行快速、宽刈幅、大面积的监测与保障.目前传统的岸基雷达辐射距离近,舰载、机载雷达行进路线受限,难以对我国远海进行有效的监测.星载雷达具有全天候和全球覆盖的优点,能够监视全球地区和目标[1 ] .以南海为例,要想在卫星过境时对其进行全面监测,需要散射计扫描刈幅超过2 000 km,要准确发现和定位观测舰船目标,需要分辨率保持在1 km数量级. ...
1
2010
... 目前我国面临日益严峻的海洋安全环境与形势,为了维护领海和主权的完整,增强维护国家海洋权益与海洋安全的能力,需要对海面目标进行快速、宽刈幅、大面积的监测与保障.目前传统的岸基雷达辐射距离近,舰载、机载雷达行进路线受限,难以对我国远海进行有效的监测.星载雷达具有全天候和全球覆盖的优点,能够监视全球地区和目标[1 ] .以南海为例,要想在卫星过境时对其进行全面监测,需要散射计扫描刈幅超过2 000 km,要准确发现和定位观测舰船目标,需要分辨率保持在1 km数量级. ...
王超,张红,吴樊,等,高分辨率SAR图像舰船目标检测与分类
1
2013
... 目前全球范围内已经建立了多个船舶遥感探测和监视系统,包括美国NASA的AKDEMO、英国QinetiQ公司的MaST、挪威FFI公司的Eldhuset、加拿大Satlantic公司的OMW、英国QinetiQ公司的MAST、挪威Kongsberg公司的MeosView、法国Kerguelen的CLS和法国BOOST公司的BOOST船舶遥感探测系统等,主要处理方法是基于SAR数据的恒虚警(Constant False Alarm Rate, CFAR)检测算法[2 ] . ...
[张庆君,高分三号卫星总体设计与关键技术
1
2017
... 虽然SAR卫星数据分辨率较高,是目前舰船检测的主要数据源,但扫描幅宽受限.例如目前在轨的GF-3卫星最大刈幅宽度650 km,Radarsat-2卫星最大刈幅宽度500 km,Sentinel-1卫星最大刈幅宽度400 km[3 ] ,均不能满足应用需求.对于真实孔径雷达来说,幅宽在大于2 000 km时,方位向分辨率在几十公里量级,无法对目标进行方位高分辨和准确定位[4 ] .因此散射计设计来说,在保证刈幅宽度的同时,提高方位分辨率,就成了散射计发展新的需求[5 -6 ] . ...
[张庆君,高分三号卫星总体设计与关键技术
1
2017
... 虽然SAR卫星数据分辨率较高,是目前舰船检测的主要数据源,但扫描幅宽受限.例如目前在轨的GF-3卫星最大刈幅宽度650 km,Radarsat-2卫星最大刈幅宽度500 km,Sentinel-1卫星最大刈幅宽度400 km[3 ] ,均不能满足应用需求.对于真实孔径雷达来说,幅宽在大于2 000 km时,方位向分辨率在几十公里量级,无法对目标进行方位高分辨和准确定位[4 ] .因此散射计设计来说,在保证刈幅宽度的同时,提高方位分辨率,就成了散射计发展新的需求[5 -6 ] . ...
Space-based Radar Handbook
1
2005
... 虽然SAR卫星数据分辨率较高,是目前舰船检测的主要数据源,但扫描幅宽受限.例如目前在轨的GF-3卫星最大刈幅宽度650 km,Radarsat-2卫星最大刈幅宽度500 km,Sentinel-1卫星最大刈幅宽度400 km[3 ] ,均不能满足应用需求.对于真实孔径雷达来说,幅宽在大于2 000 km时,方位向分辨率在几十公里量级,无法对目标进行方位高分辨和准确定位[4 ] .因此散射计设计来说,在保证刈幅宽度的同时,提高方位分辨率,就成了散射计发展新的需求[5 -6 ] . ...
[王刚,董晓龙,朱迪,基于星载旋转扫描雷达的高分辨率实现
1
2017
... 虽然SAR卫星数据分辨率较高,是目前舰船检测的主要数据源,但扫描幅宽受限.例如目前在轨的GF-3卫星最大刈幅宽度650 km,Radarsat-2卫星最大刈幅宽度500 km,Sentinel-1卫星最大刈幅宽度400 km[3 ] ,均不能满足应用需求.对于真实孔径雷达来说,幅宽在大于2 000 km时,方位向分辨率在几十公里量级,无法对目标进行方位高分辨和准确定位[4 ] .因此散射计设计来说,在保证刈幅宽度的同时,提高方位分辨率,就成了散射计发展新的需求[5 -6 ] . ...
[王刚,董晓龙,朱迪,基于星载旋转扫描雷达的高分辨率实现
1
2017
... 虽然SAR卫星数据分辨率较高,是目前舰船检测的主要数据源,但扫描幅宽受限.例如目前在轨的GF-3卫星最大刈幅宽度650 km,Radarsat-2卫星最大刈幅宽度500 km,Sentinel-1卫星最大刈幅宽度400 km[3 ] ,均不能满足应用需求.对于真实孔径雷达来说,幅宽在大于2 000 km时,方位向分辨率在几十公里量级,无法对目标进行方位高分辨和准确定位[4 ] .因此散射计设计来说,在保证刈幅宽度的同时,提高方位分辨率,就成了散射计发展新的需求[5 -6 ] . ...
星载扫描微波散射计方位向高分辨处理方法研究
1
2017
... 虽然SAR卫星数据分辨率较高,是目前舰船检测的主要数据源,但扫描幅宽受限.例如目前在轨的GF-3卫星最大刈幅宽度650 km,Radarsat-2卫星最大刈幅宽度500 km,Sentinel-1卫星最大刈幅宽度400 km[3 ] ,均不能满足应用需求.对于真实孔径雷达来说,幅宽在大于2 000 km时,方位向分辨率在几十公里量级,无法对目标进行方位高分辨和准确定位[4 ] .因此散射计设计来说,在保证刈幅宽度的同时,提高方位分辨率,就成了散射计发展新的需求[5 -6 ] . ...
星载扫描微波散射计方位向高分辨处理方法研究
1
2017
... 虽然SAR卫星数据分辨率较高,是目前舰船检测的主要数据源,但扫描幅宽受限.例如目前在轨的GF-3卫星最大刈幅宽度650 km,Radarsat-2卫星最大刈幅宽度500 km,Sentinel-1卫星最大刈幅宽度400 km[3 ] ,均不能满足应用需求.对于真实孔径雷达来说,幅宽在大于2 000 km时,方位向分辨率在几十公里量级,无法对目标进行方位高分辨和准确定位[4 ] .因此散射计设计来说,在保证刈幅宽度的同时,提高方位分辨率,就成了散射计发展新的需求[5 -6 ] . ...
Radar Target Recognition
1
2014
... 雷达目标识别是随着雷达探测技术和信息处理技术的进步而发展出来的崭新技术[7 ] ,包括使用高分辨距离像(High Resolution Range Profile,HRRP)开展目标识别研究.目前已有使用实测海面舰船HRRP数据进行舰船识别分类的研究[8 ] ,该研究数据表明使用10类舰船(包括军船和民船)的实测HRRP数据测试情况下,平均正确识别率可以达到80%以上,因此可通过使用高分辨距离像目标识别技术来提高星载散射计对海面舰船目标的检测能力. ...
魏存伟,刘先康, 孙菲,
1
2017
... 雷达目标识别是随着雷达探测技术和信息处理技术的进步而发展出来的崭新技术[7 ] ,包括使用高分辨距离像(High Resolution Range Profile,HRRP)开展目标识别研究.目前已有使用实测海面舰船HRRP数据进行舰船识别分类的研究[8 ] ,该研究数据表明使用10类舰船(包括军船和民船)的实测HRRP数据测试情况下,平均正确识别率可以达到80%以上,因此可通过使用高分辨距离像目标识别技术来提高星载散射计对海面舰船目标的检测能力. ...
魏存伟,刘先康, 孙菲,
1
2017
... 雷达目标识别是随着雷达探测技术和信息处理技术的进步而发展出来的崭新技术[7 ] ,包括使用高分辨距离像(High Resolution Range Profile,HRRP)开展目标识别研究.目前已有使用实测海面舰船HRRP数据进行舰船识别分类的研究[8 ] ,该研究数据表明使用10类舰船(包括军船和民船)的实测HRRP数据测试情况下,平均正确识别率可以达到80%以上,因此可通过使用高分辨距离像目标识别技术来提高星载散射计对海面舰船目标的检测能力. ...
中国海洋卫星遥感技术进展海洋卫星应用遥感技术进展
1
2019
... 针对全天候、全球覆盖的海面舰船目标检测的需求[9 -10 ] ,提出了一种基于星载宽刈幅散射计海面舰船目标检测方法,该方法使用扇形波束旋转扫描散射计,发射宽带线性调频信号,首先对接收到的回波信号进行方位高分辨,使方位分辨率达到1 km以下,实现对海面舰船目标的分离,然后进行海面舰船目标检测,得到不同方位角下多次观测信息,提取舰船信号,通过多普勒频率、高分辨距离像等观测数据,计算舰船长度、与散射计运动方向夹角,对舰船类型进行初步分类识别,实现辅助检测功能. ...
中国海洋卫星遥感技术进展海洋卫星应用遥感技术进展
1
2019
... 针对全天候、全球覆盖的海面舰船目标检测的需求[9 -10 ] ,提出了一种基于星载宽刈幅散射计海面舰船目标检测方法,该方法使用扇形波束旋转扫描散射计,发射宽带线性调频信号,首先对接收到的回波信号进行方位高分辨,使方位分辨率达到1 km以下,实现对海面舰船目标的分离,然后进行海面舰船目标检测,得到不同方位角下多次观测信息,提取舰船信号,通过多普勒频率、高分辨距离像等观测数据,计算舰船长度、与散射计运动方向夹角,对舰船类型进行初步分类识别,实现辅助检测功能. ...
[林幼权,星载海洋监视雷达系统
1
2012
... 针对全天候、全球覆盖的海面舰船目标检测的需求[9 -10 ] ,提出了一种基于星载宽刈幅散射计海面舰船目标检测方法,该方法使用扇形波束旋转扫描散射计,发射宽带线性调频信号,首先对接收到的回波信号进行方位高分辨,使方位分辨率达到1 km以下,实现对海面舰船目标的分离,然后进行海面舰船目标检测,得到不同方位角下多次观测信息,提取舰船信号,通过多普勒频率、高分辨距离像等观测数据,计算舰船长度、与散射计运动方向夹角,对舰船类型进行初步分类识别,实现辅助检测功能. ...
[林幼权,星载海洋监视雷达系统
1
2012
... 针对全天候、全球覆盖的海面舰船目标检测的需求[9 -10 ] ,提出了一种基于星载宽刈幅散射计海面舰船目标检测方法,该方法使用扇形波束旋转扫描散射计,发射宽带线性调频信号,首先对接收到的回波信号进行方位高分辨,使方位分辨率达到1 km以下,实现对海面舰船目标的分离,然后进行海面舰船目标检测,得到不同方位角下多次观测信息,提取舰船信号,通过多普勒频率、高分辨距离像等观测数据,计算舰船长度、与散射计运动方向夹角,对舰船类型进行初步分类识别,实现辅助检测功能. ...
Keith Ward, Robert Tough, Simon Watts
0
2016
PFA在SAR超高分辨率成像和SAR/GMTI中的应用研究
0
2009
PFA在SAR超高分辨率成像和SAR/GMTI中的应用研究
0
2009
张风丽,张磊,吴炳方,欧盟船舶遥感探测技术与系统研究的进展
0
2007
张风丽,张磊,吴炳方,欧盟船舶遥感探测技术与系统研究的进展
0
2007
三维随机粗糙海面与舰船的复合电磁特性的高频方法分析研究
0
2019
三维随机粗糙海面与舰船的复合电磁特性的高频方法分析研究
0
2019
高分辨率SAR卫星图像舰船目标识别可用性分析
0
2021
高分辨率SAR卫星图像舰船目标识别可用性分析
0
2021
基于深度学习的海上舰船目标多源特征融合识别
0
2021
基于深度学习的海上舰船目标多源特征融合识别
0
2021






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}