




1 引 言
来自多源遥感卫星数据的植被指数时间序列数据集在土地利用类型分类[1-2]、植被活动监测[3-4]、物候信息提取[5-6]等领域有着非常广泛的应用,因此它早已经成为了许多科学研究、工程项目的重要数据源之一[7]。然而云、云阴影、大气溶胶、冰雪、视场、数据传输等都会污染遥感植被指数[8]。为了解决这些问题,虽然研究者已经开发了许多处理方法,并将最大值合成[9](Maximum Value Composite,MVC)应用到了数据集的生产中,但是最终生成的数据集仍会受到云、云影等的影响,研究人员仍需要在众多数据中筛选出合适无云影像,这限制了数据的进一步应用。因此,寻找一种可靠的重建算法来处理影像非常重要。
目前,国内外运用比较广泛的方法有HANTS[10](Harmonic Analysis of NDVI Time Series)、S-G滤波[11](Savitzky-Golay Filter, S-G)、非对称高斯拟合法[12](Asymmetric Gaussian model function, AG)、双逻辑拟合法[13](Double Logistic function, DL)。Per Jönsson和Lars Eklundh开发的TIMESAT软件集成了S-G、AG、DL 3种算法,且该软件运用广泛,尤以S-G算法运用最多且效果良好[11, 14-16]。从2004年Chen等[11]用迭代的S-G算法对NDVI序列进行滤波开始,到2012年张慧芳等[17]的基于背景库的时序数据S-G滤波重建,再到2013和2019年周增光等[18-20]结合影像质量的S-G滤波等,基于S-G滤波的重建算法取得了很大进展。然而,这些方法都在追求时间序列曲线的上包络线,容易出现过拟合的现象。实验结合克里金插值方法和质量权重,最大限度地保留了可靠像元,减少过拟合现象的出现。利用皮尔逊相关系数和新的平滑度指数进行对比,找出重庆市范围内二者表现都较好的SG滤波算法参数组合。
2 研究区域概况及数据来源
2.1 研究区概况
重庆地处西南,跨28°10′~32°13′N,105°11′~ 110°11′E,面积达8.24万km2,年日照数1 000~1 500 h,日照率仅为25%~35%;其中冬春季日照更少,多为云雾天气。中西部为低山丘陵地带、东南部海拔较高为多山峰、东北部为高峡平湖,导致东南部与中西部全年云量较多,而东北部云量较少。因此对该地区植被指数长时间序列进行恢复重建,具有良好的现实意义。
2.2 数据源
实验数据源为MODIS全球数据集:MOD13Q1.006(
DetailedQA以16位无符号整型方式存储,在比特位0~1处为指数质量指标,具体如表1所示。
表1 MOD13Q1.006 指数质量波段
Table 1
| 比特位 | 数据说明 | 质量分级 |
|---|---|---|
| 00 | 指数质量良好,可以直接使用 | 高质量 |
| 01 | 指数质量一般,需要结合其它信息 | 中质量 |
| 10 | 有云、雾等干扰 | 低质量 |
| 11 | 数据丢失 | 噪声 |
3 研究方法
实验结合数据集的质量波段信息与空间插值和S-G滤波提出一种新方法(Weight-SG,WSG)从时空上均对被污染的像元值进行恢复重建。具体算法流程如图1所示。
图1
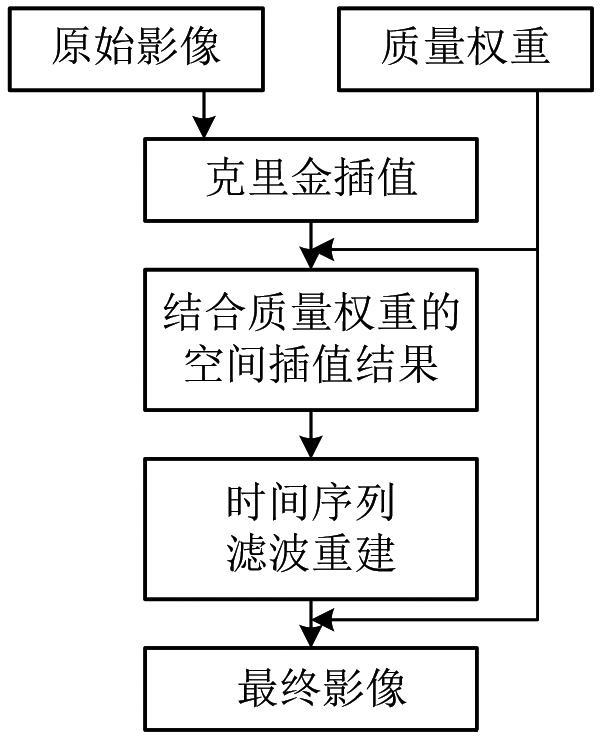
首先对时间段内的全球影像进行裁剪,仅保留重庆区域;同时统计影像质量波段信息,得出各质量等级占比后再转化为相应的质量权重。然后利用克里金插值法对原始影像进行空间插值,并按其权重对插值结果与原始影像进行合成同时更新权重;接着继续进行S-G滤波重建,再次结合质量权重得出最终的影像。
3.1 质量等级权重
S-G滤波算法基于假设[26](云、气溶胶等对NDVI值的影响往往倾向削弱NDVI值的方向)进行迭代来逼近原始NDVI曲线的上包络线从而获得最终结果。但在实际过程中并不完全满足该假设:在低NDVI值的背景区域,NDVI值反而会有所升高,所以盲目的取较大值并不可取。实验结合像元本身的质量等级为其分配不同的权重,继而获得最终的结果如
其中:
3.2 空间插值
Tobler地理学第一定律[26]指出:任何事物与别的事物之间都是相关的,但近处的事物比远处的事物的相关性更强。S-G滤波不能对不同时间间隔的数据进行处理,所以在进行滤波重建之前对数据进行适当的插值不仅能方便进一步的处理,也能极大的提高中、低质量和噪声像元的可信度。
克里金插值法[27](Kriging/Krige)最早是由法国地理学家Matheron和南非矿山工程师Krige提出的,主要用于矿山勘探。克里金插值法认为在空间中属性的变化是非常不规则,且不连续的,用简单的平滑函数将出现较多的误差,应该使用能反应空间变异性的变异函数。具体公式如
其中:
重庆市影像质量较差,使用部分像元进行小范围插值时会导致其它区域没有插值结果,因此实验中对全图使用了克里金插值,同时为了减少中、低质量像元对插值结果的影像,在插值后引入质量权重占比对结果进行再次处理。原始影像中高质量像元的值直接代替插值结果,而中、低质量像元按照权重占比来重新合成。同时对结果的质量进行新一轮判定,并在之后的SG滤波中沿用该等级。
3.3 改进后的SG滤波算法
S-G滤波是由Savizky和Golay率先提出继而广泛应用于平滑时间序列数据的算法[11]。S-G滤波是一种基于最小二乘法多项式拟合法,通过一定长度的窗口大小,对待处理数据进行多项式加权拟合,继而求出最小均方根误差。其基本公式如
其中:N为窗口大小,满足
3.4 评价指标
3.4.1 样本点
Pearson相关系数是一种常见的统计学系数,用来表示两组变量的相关程度。具体如
其中:
其中:M为极值点个数;y为曲线所跨越的时间长度(按年计);n为当地所生长植被的生长季个数;N为数据集每年的影像总数。
3.4.2 单幅图像
为了进一步比较S-G滤波算法以及WSG算法的重建结果,选取2014年春到2018年冬末影像质量较好的5幅,对原始影像引入10%的随机噪声,再对新的数据集分别进行S-G和WSG滤波。由于原始影像的质量较好,所以可以将原始影像作为参考影像,对比两种方法重建后的相关性以及噪声区域的NDVI值变化,可以定量分析重建结果。
4 结果与分析
4.1 MODIS MOD13Q1数据集质量分析
利用MOD13Q1自带的指数质量波段,对5 a内的图像进行分析,如图2所示。结果表明:5 a内中质量像元占比数量最多达到了40.67%,而高质量和低质量像元分别占比30.36%和28.95%,噪声像元仅占0.02%。2018年冬季高质量像元占比最低,仅为4.78%;2017年春季高质量像元占比最高,为61.82%。整体呈现出春夏季节高质量数据多而秋冬季节的低质量数据多的特征,从春季开始高质量数据占比逐减降低直到冬季达到最低。其中2014年春季质量高的像元占比较少,和上文提到的情况有所出入,详细浏览数据发现是由于该时间段内卫星数据缺失严重所引起的。
图2
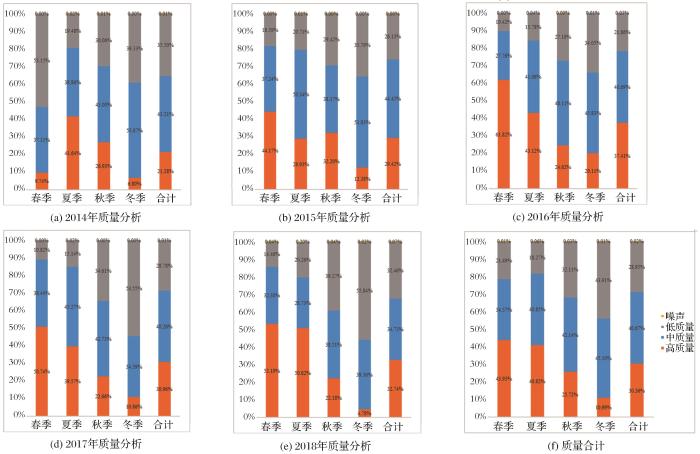
从整体上看中质量像元占比在40.67%,低质量像元占比在28.95%;所以将质量权重分别设置为0.4和0.3,具体的质量等级与权重转换表如表2所示。
4.2 空间插值结果分析
为了降低中、低质量与噪声像元对滤波重建结果的影响,实验使用空间插值法对图像进行处理来填充缺失值,提高像元的可信度,并选取时间段内第一幅影像(时间:2014年3月22日)来说明插值结果。
4.2.1 整体结果
图3

4.2.2 局部细节
图4

图5

4.3 滤波结果分析
4.3.1 参数分析
图6
S-G滤波结果的NDVI曲线相关性均值为0.77、平滑度均值为0.75,其中结果高于相关性均值的实验有496组,高于平滑度均值的实验有459组,高于均值的实验参数分布情况如表3所示。
表3 参数分布情况
Table 3
| 相关性 | 平滑度 | ||||||
|---|---|---|---|---|---|---|---|
| m | 个数 | d | 个数 | m | 个数 | d | 个数 |
| 2 | 132 | 2 | 199 | 2 | 0 | 2 | 177 |
| 3 | 105 | 3 | 199 | 3 | 36 | 3 | 177 |
| 4 | 83 | 4 | 225 | 4 | 74 | 4 | 105 |
| 5 | 70 | 5 | 97 | ||||
| 6 | 60 | 6 | 120 | ||||
| 7 | 46 | 7 | 132 | ||||
由结果分析可知:随着m的增加,相关性越低、平滑度越高;随着d的增加,相关性越高、平滑度越低。所以本实验将后续的S-G滤波以及WSG滤波参数m、d均设置为5和3。
4.3.2 滤波结果
对5 a内的数据进行滤波后,结果如图7所示。样本点的时间序列曲线能直观反映各样本点的影像质量:样本点17,波动较大、但产生大波动的频率不如样本点26;样本点26波动小于17,但产生大波动的频率远远高于17;而样本点39大波动较少,频率也较低。完全符合选取的样本点实际情况。3个样本点中,S-G方法均存在一定程度上的低估或高估,为了平滑丢失了部分细节,虽然平滑度较高,但相关性很低。尤其以样本点26最为严重,因为影像波动过于频繁,导致拟合值与原始值差距较大。而WSG方法虽然平滑度不如S-G但高于原始曲线,且WSG相关性高于S-G。即WSG方法的相关性很高,对原始NDVI序列的改变较小;S-G滤波结果具有一定的过拟合现象。具体3个样本点的对比如表4所示。
图7

表4 样本点的相关性与平滑度
Table 5
| 样本点 | SGPearson | WSGPearson | 原始平滑度 | SG平滑度 | WSG平滑度 |
|---|---|---|---|---|---|
| 17 | 0.53 | 0.72 | 0.52 | 0.77 | 0.56 |
| 26 | 0.71 | 0.76 | 0.52 | 0.82 | 0.51 |
| 39 | 0.69 | 0.82 | 0.44 | 0.76 | 0.55 |
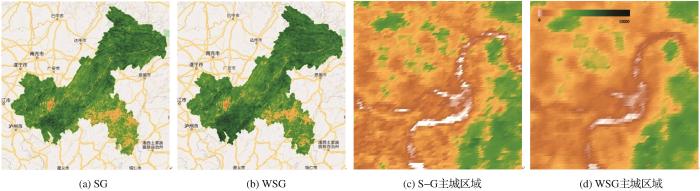
依旧选取时间段内第一幅影像进行说明,图8(a)、图8(b)分别是SG滤波和WSG滤波结果,与图3(a)的原始影像相比二者都重建了较大范围,但WSG滤波比S-G保留了更多的细节,且没有出现明显的过拟合现象。虽然从直观上S-G滤波结果看起来更好,植被区域更广阔,但是其与原始影像的相关系数仅为0.62,数据的可信度大大降低,并且低NDVI值的建筑区域存在较为严重的过拟合现象;而WSG结果的相关系数为0.78,比S-G滤波更加贴近实际情况。图8(c)、图8(d)分别是其对应的主城区,S-G滤波结果更复杂,在同一地物的建筑区域,NDVI变化频繁,且范围过大不符合实际情况,但河流的轮廓比WSG清晰一些;WSG滤波结果在建筑区域,NDVI变化更加均匀,恢复结果略好于S-G。
图8
4.3.3 人工插入噪声
实验选取2016年5月24日与2017年4月7日两幅影像来进行说明,两幅原始影像添加了10%的随机噪声后如图9所示。
图9

通过S-G滤波以及WSG滤波后的结果如图10所示:从直观上来讲,WSG重建后的结果比S-G更好,有效的重建了噪声区域的NDVI值。而S-G的重建结果整体NDVI值偏高较为严重,且能明显的观察到噪声像元存在过的痕迹。对二者进行相关性分析,S-G的Pearson相关系数分别为0.65和0.61,而WSG为0.87和0.94明显高于S-G的相关性,重建结果在目视上也更接近于真实影像。
图10

为了更直观地展示重建结果,对比原始影像和重建影像中噪声部分的NDVI值变化,具体如图11所示(为方便展示,NDVI均乘以一万)。
图11

由图11可以明显看出,在人为添加的噪声区域中,WSG重建结果与真实影像更加接近,差值集中在在1 000以内,少部分在1 000~2 000,超过3 000的很少;而S-G重建结果相对较差,大部分在1 000~3 000,最大值甚至接近6 000。所以,整体来讲,WSG方法的恢复重建效果优于S-G。
5 结 论
5.1 结论
实验基于GEE云平台实现了经典S-G滤波算法,并在其基础上,结合空间插值法和质量权重提出了WSG方法,进一步在参数不变的情况下提升了重建结果的相关性。同时提出了一个平滑度指标来描述时间序列曲线的平滑程度。通过对研究结果进行分析主要得出以下结论:
(1)使用空间插值法对原始影像中的低质量及噪声像元进行预处理后,能够提升滤波重建结果的相关性,但要尽量减小因插值带来的块效应。S-G滤波算法和WSG都能够较好地重建被云雾覆盖等原因污染的NDVI值,同参数下S-G滤波在相关性上低于WSG,在平滑度上略高于WSG。
(2)GEE云平台能够完成一部分的空间信息处理与分析工作,降低了遥感信息处理的门槛,但相较于传统工具(ArcGIS、QGIS、ENVI等)还有一定的差距。本研究使用时遇到的主要问题体现在:①分配给用户的云计算资源略有不足;②没有较为完善的制图、出图工具;③基于C/S架构,用户运行的结果往往是异步的,如果使用较多的循环等会导致运行超时网页无响应;④对矢量文件的运算处理缺少优化,计算复杂边界时会导致运算量加大。
5.2 展望
时间序列数据重建对于生成更加可靠的数据,进行下一步研究具有重大意义,结合云计算可以在减少数据收集、预处理时间的同时加快重建算法的运行效率。且随着越来越多的科研人员加入与技术的逐步发展,时间序列重建甚至可以在做到与原始数据一样的更新频率的情况下获得质量更好的影响,为后续的土地利用类型分类、植被覆盖度分析等奠定良好的基础。
参考文献
Sub-pixel model for vegetation fraction estimation based on land cover classification
[J].
基于土地覆盖分类的植被覆盖率估算亚像元模型与应用
[J].
An evaluation of time-series Smoothing Algorithms for land-cover classifications using MODIS-NDVI multi-temporal data
[J].
A time series for monitoring vegetation activity and phenology at 10-daily time steps covering large parts of South America
[J].
European plant phenology and climate as seen in a 20-year AVHRR land-surface parameter dataset
[J].
Trends in Normalized Difference Vegetation Index (NDVI) associated with urban development in northern west Siberia
[J].
Human-induced greening of the northern extratropical land surface
[J].
Land-cover change detection using multi-temporal MODIS NDVI data
[J].
Review on methods of remote sensing time-series data reconstruction
[J].
遥感时间序列数据滤波重建算法发展综述
[J].
Characteristics of maximum-value composite images from temporal AVHRR data
[J].
Filtering pathfinder AVHRR land NDVI data for australia
[J].
A simple method for reconstructing a high-quality NDVI time-series data set based on the Savitzky-Golay filter
[J].
Seasonality extraction by function fitting to time-series of satellite sensor data
[J].
Reconstructing pathfinder AVHRR land NDVI time-series data for the Northwest of China
[J].
Comparison of three NDVI time-series fitting methods based on TIMESAT-Talking the grassland in Northern Tibet as case
[J].
基于TIMESAT的3种时序NDVI拟合方法比较研究——以藏北草地为例
[J].
Applicability of fitting and reconstruction method of MODIS long-time enhanced vegetation index in Beijing-Tianjin-Hebei
[J].
京津冀MODIS长时序增强型植被指数拟合重建方法适用性研究
[J].
Research on medium and high spatial resolution
[D].
中高空间分辨率卫星NDVI时间序列数据重建技术研究
[D].
Reconstruction of high-quality LAI time-series product based on long-term historical database
[J].
基于背景库的高质量 LAI 时间序列数据重建
[J].
VI-Quality-Based Savitzky-Golay method for filtering time series data
[J].
基于质量权重的 Savitzky-Golay 时间序列滤波方法
[J].
Filtering and reconstruction of LAI time series data by filter based on pixel quality analysis and outlier detection
[J].
基于像元质量分析和异常值检测的LAI 时序数据 S-G 滤波重建研究
[J].
Reconstruction of MODIS vegetation index time series by adaptive weighted Savitzky-Golay filter
[J].
自适应加权Savitzky-Golay滤波重构MODIS植被指数时间序列
[J].
Monitoring to variations of vegetation cover using long-term time series remote sensing data on the Google Earth Engine cloud platform
[J].
基于Google Earth Engine 云平台的植被覆盖度变化长时间序列遥感监测
[J].
Spatiotemporal variations of fractional vegetation coverage in China based on Google Earth Engine
[J].
基于Google Earth Engine的中国植被覆盖度时空变化特征分析
[J].
Mapping impervious surface dynamics of Guangzhou downtown based on Google Earth Engine
[J].
基于GEE平台的广州市主城区不透水面时间序列提取
[J].
A robust method for reconstructing global MODIS EVI time series on the Google Earth Engine
[J].
Correction of time series NDVI by the method of temporal window operation
[C]∥
A computer movie simulating urban growth in the detroit region
[J].
A tutorial guide to geostatistics: Computing and modelling Variograms and Kriging
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}