




1 引 言
无人机(Unmanned Aerial Vehicle, UAV)在近些年的快速发展,提供了获取森林结构新的技术手段[7]。无人机搭载激光雷达可获得高精度森林树高,但激光雷达的高成本限制了其被广泛使用[8]。无人机可通过普通相机获取高重叠度地面影像,使用立体摄影测量技术进行三维重建获取地面点云,继而获取较高精度的树高信息,如Sarron等[9]使用大疆无人机在40 m高度测得的树高值与地面测量值的R2为0.96,RMSE%为11%;杨坤使用大疆M100无人机在飞行高度为60 m时获取的梧桐和圆柏的树高测量值与真实值R2分别为0.992 和0.889,标准误差分别为29.2 cm和50.9 cm[10]。由于无人机受到飞行高度和距离的限制,目前只适用于小范围测量。
高分影像包含的多光谱信息已经证明与植被结构有关,例如Peter等[24]使用SPOT-5卫星影像数据对美国明尼苏达东北部阔叶林和针叶林树高进行研究,使用多光谱反射与植被指数建立的偏最小二乘回归模型得到的树高与地面实测值R2分别为0.69 和0.92,RMSE分别为1.27 m和1.59 m;Donoghue等[25]使用IKONOS获取北美云杉树高,发现在森林密度较大区域(密度>2 000株/hm2),绿光波段与树高的线性回归模型的相关关系最好,R2达到0.84。高分影像中含有的丰富的纹理信息可以和光谱信息一起被有效利用,已有研究证明GLCM(Grey-Level Co-occurrence Matrix)和GLDV(Gray-level Difference Vector)[26]等纹理参数与植被的结构信息有关,例如Chen等[27]使用QuickBird影像,利用面向对象影像分析技术提取森林影像纹理信息、光谱信息和阴影信息,获取比较了不同尺度上的森林高度,利用纹理信息、光谱信息和阴影信息建立的线性模型估测的树高精度要显著高于只使用光谱信息模型估测的树高,并且,随着分割尺度的变大,模型的R2也随之增加。Gomes等[28]使用RapidEye光谱反射和纹理数据对巴西Cerrado生态系统的植被高度进行非线性建模,模型的调整R2为0.43。Shamsoddini等[29]使用WorldView2对澳大利亚新南威尔士松树结构信息进行研究,使用光谱反射率及光谱指数建立的树高线性模型,R2为0.461,使用纹理数据建立的树高模型,R2达到了0.904,并且发现,30 m尺度为模型精度最优。使用高分影像建立树高回归模型,必须要有相应的高精度树高数据用于高度定标,以上研究使用的高度数据通常从森林调查数据或者通过LiDAR测量获取,对于缺乏该类设备或数据的研究者则带来不便。
综上所述,不同的观测技术各有其优缺点,多种技术相结合是未来的发展方向。在以往的森林树高遥感研究中,研究的森林生态系统和尺度各不相同,其结论存在一定的局限性,为了增进对该问题的认识,需要在更多不同的森林环境和研究尺度上开展研究。
塔里木河地处中国西部内陆干旱荒漠地区,其生态环境属于变化的敏感地区,也是中国生物多样性保护研究的关键区域之一。在人类对自然水资源时空格局的改变为主要形式的扰动影响下,塔里木河下游以胡杨为主要建群种的自然植被受到严重影响,生物多样性受损,沙漠化过程加剧。自2000年开始,实施向塔里木河下游应急输水工程,以期恢复下游的生态系统,胡杨是应急输水生态恢复的目标植物之一。胡杨的高度是植被恢复的标志性指标,也是研究胡杨群落生态过程与演化机制,改善优势种群保护措施的途径[30]。
实验使用WorldView2高分辨率遥感数据,通过面向对象影像分析技术(Object-based Image Analysis,OBIA)获取塔里木河下游胡杨的几何、纹理和光谱信息,结合无人机低空遥感获取的树高信息,在单木尺度上建立并验证胡杨树高回归模型。
2 研究区和数据
2.1 研究区
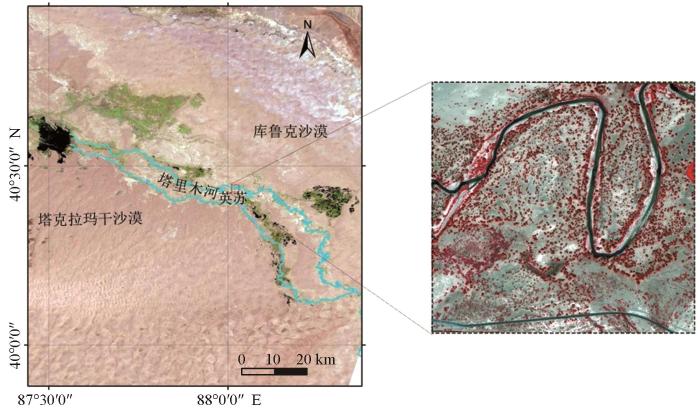
选择塔里木河下游英苏附近的一处面积为1.45 km2的河段作为研究样区(图1)。该区域地势平缓,平均海拔840 m,气候干旱、降雨稀少,土壤类型主要为盐土和风沙土,河道附近分布有胡杨构成的河岸林,由于受过去塔里木河下游断流影响,林中存在较多的枯立木。地下水供给较好的河岸附近和低阶地还发育有柽柳、沙棘、铃铛刺等植被构成的灌草地带,整体植被覆盖度较低。在此环境下,更便于进行单木尺度的树高研究。
图1
2.2 数据
研究分别使用了地面观测数据、无人机倾斜摄影测量数据和WorldView2多光谱影像数据。
2.2.1 地面测量数据
2018年8月对研究区的胡杨进行了地面测量。测量选择不同高度的胡杨共40棵,使用手持激光测高仪分别从不同方位测量胡杨高度3次,最后取平均值得到树高。该数据用于对无人机获取的树高进行评价。
2.2.2 无人机测量数据
2018年8月在研究区进行了无人机倾斜摄影测量。首先通过RTK设置30个地面控制点,然后利用Altizure软件规划飞行路线,使用大疆精灵4 pro通过5次倾斜摄影获取研究区的地面影像数据,影像参数见表1。无人机影像数据经处理后,生成研究区CHM,用于从中提取胡杨高度。
表1 影像参数
Table 1
| 数据类型 | WorldView2 | 无人机影像 |
|---|---|---|
| 获取时间 | 2018年7月 | 2018年8月 |
| 波段数 | 4 | 3 |
| 飞行高度 | 770 km | 100 m |
| 地面分辨率 | 全色:0.5 m 多光谱:2 m | 0.05 m |
| 观测天顶角 | 61.5° | 45° |
2.2.3 WV2(WorldView2)影像数据
该数据包含1个全色波段和4个多光谱波段(蓝色波段:450~510 nm;绿色波段:510~580 nm;红色波段:630~690 nm;近红外线波段:770~895 nm),影像参数见表1。WV2影像首先经过大气校正、几何校正和影像融合处理,再通过面向对象影像分析技术处理后,提取了胡杨树冠及光谱、纹理信息。
3 研究方法
3.1 技术路线
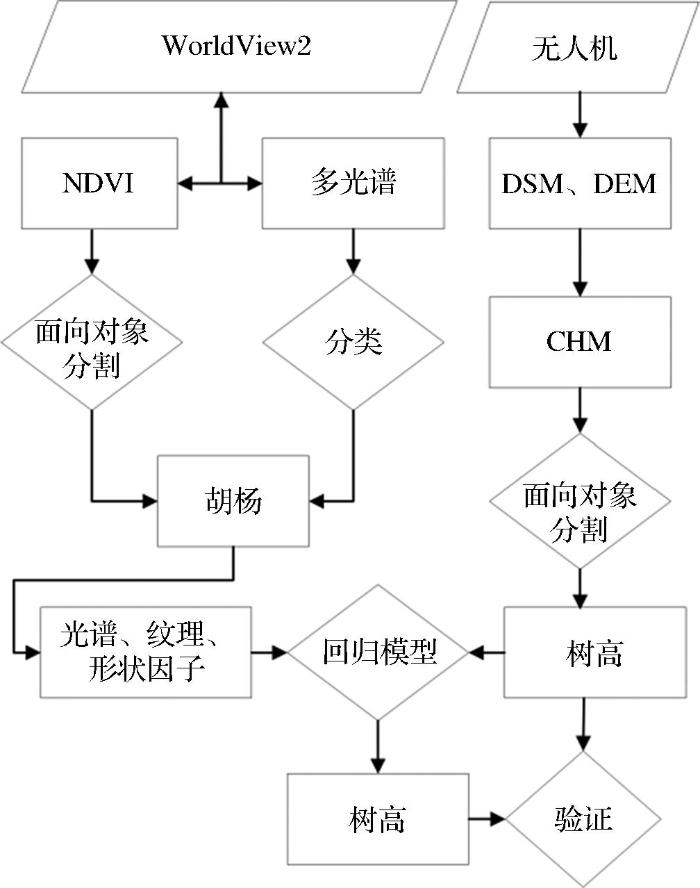
通过使用面向对象影像分割和分类技术,获取单木尺度胡杨树冠,提取其对应的光谱、纹理和几何特征,在此基础上,结合无人机获取的CHM冠层高度信息,分别使用Linear、MLP、PACE 和SVR回归方法建立单木尺度的胡杨高度回归模型,并进行精度评价。
图2
3.2 数据处理
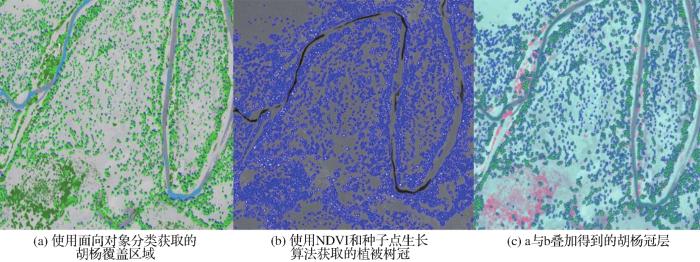
3.2.1 胡杨树冠获取
图3
3.2.2 胡杨高度获取
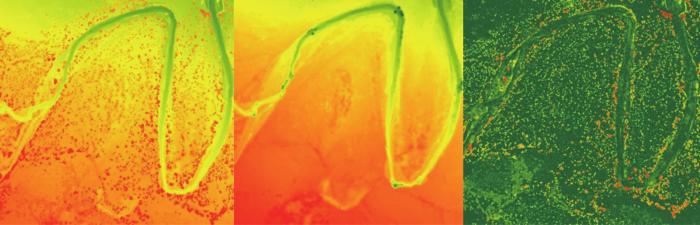
通过Pix4dMapper摄影测量软件对无人机影像进行影像对齐,提取特征点,空三加密等处理后生成点云数据,对点云数据经过分类得到地表和植被点云,再插值生成DSM和DEM,进而得到CHM(图4)。从CHM上量取的树高值与地面实测的40棵胡杨树高值相比较,两者R2为0.833 4,CHM精度为84.5%,证明无人机获取的CHM可以被用来获取树高。最后,在ArcGIS中,通过区域统计分析功能从CHM 中提取对应的树高信息。为了与枯立木和灌木区分开,选择高度4 m以上的对象,最后共得到3 505个胡杨样本。
图4
3.3 特征获取
3.3.1 特征选择
eCognition软件可以计算多种对象特征信息,根据研究的需要,选择了光谱、几何和纹理3类特征,通过与树高的相关性进行分析,从中挑选出32个特征,其中有1个几何特征,21个光谱特征,10个纹理特征。
光谱特征为蓝、绿、红和近红外四波段反射率、衍生计算得到的NDVI值,以及这些数据对应的统计量值,如最大差异值、均值、标准差和中位数;纹理特征为GLCM(灰度共生矩阵)和GLDV(灰度差向量)的反差、相关性、熵和均值(见表2)。可以看出,光谱特征中半数特征与胡杨树高相关性较强,相关系数超过0.5;纹理特征总体与树高相关性较弱,均低于0.46。
表2 特征列表
Table 2
| 特征 | 说明 | R | 特征 | 说明 | R |
|---|---|---|---|---|---|
| Brightness | 亮度 | -0.176 | Max_Green | 绿光最大值 | -0.35 |
| Max_diff | 最大差异度量 | 0.63 | Mean_Ndvi | NDVI均值 | 0.602 |
| Quantile _Ndvi | NDVI中位数 | 0.601 | Max_Ndvi | NDVI最大值 | 0.539 |
| Quantile _Nir | 近红外中位数 | 0.361 | Max_Blue | 蓝光最大 | -0.354 |
| Quantile _Blue | 蓝光中位数 | -0.525 | Max_Nir | 近红外最大值 | 0.298 |
| Quantile _Green | 绿光中位数 | -0.514 | GLCM.Contrast | GLCM反差 | -0.416 |
| Quantile _Red | 红光中位数 | -0.549 | GLCM.Correlation | GLCM相关性 | 0.307 |
| Standard Deviation _Blue | 蓝光标准差 | -0.331 | GLCM.Dissimilarity | GLCM异质性 | -0.457 |
| Standard Deviation _Red | 红光标准差 | -0.327 | GLCM.Entropy | GLCM熵 | 0.277 |
| Standard Deviation _Ndvi | NDVI标准差 | 0.279 | GLCM.Homogeneity | GLCM同质性 | 0.449 |
| Standard Deviation _Green | 绿光标准差 | -0.281 | GLCM.Mean | GLCM均值 | -0.407 |
| Standard Deviation _Nir | 近红外标准差 | 0.194 | GLDV.Ang.2 | GLDV角二阶矩 | 0.457 |
| Mean_Blue | 蓝光均值 | -0.567 | GLDV.Contrast | GLDV反差 | -0.416 |
| Mean_Green | 绿光均值 | -0.555 | GLDV.Entropy | GLDV熵 | -0.454 |
| Mean_Red | 红光均值 | -0.575 | GLDV.Mean | GLDV均值 | -0.457 |
| Mean_Nir | 近红外均值 | 0.348 | Area | 面积 | 0.413 |
3.3.2 特征分析
为了更好地了解不同特征与树高的关系,方便选择回归模型和理解建模效果,下面列出各个特征与树高的XY散点图(图5)。
图5
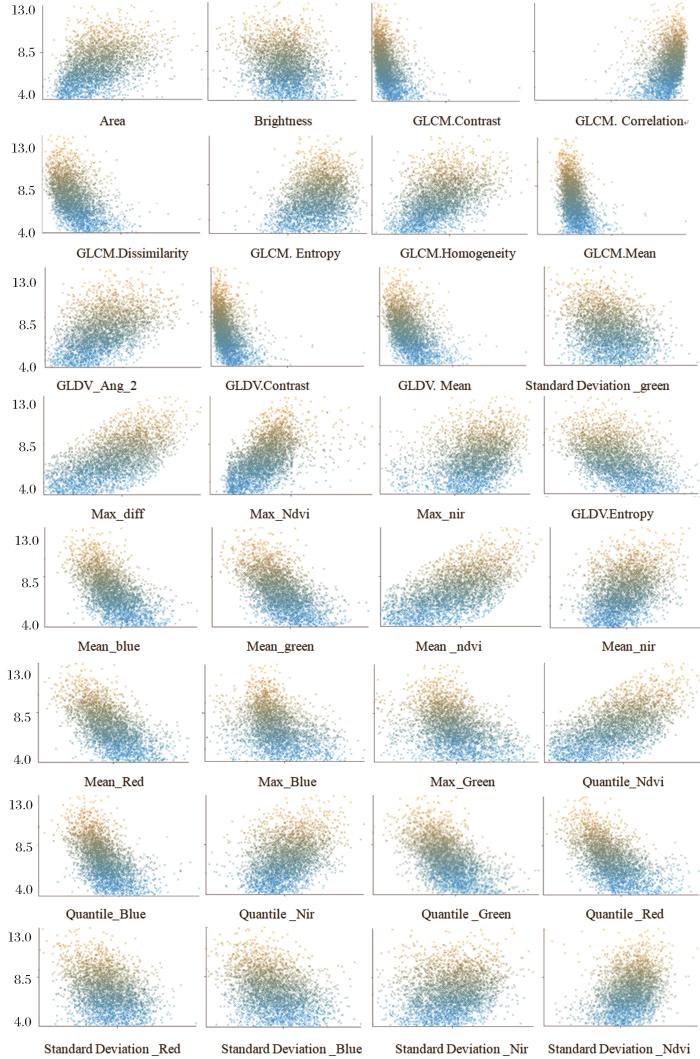
由图5看出,纹理特征与树高呈非线性关系,大部分光谱特征与树高呈线性关系。由于光谱特征数量较多,回归模型主要由线性模型组成。
3.4 回归模型
3.4.1 模型介绍
根据特征与树高的关系,选择有代表性的几种线性和非线性模型来建立树高回归模型,分别是: Linear Regression(线性回归)、MLP Regression(多层感知机MLP,Multilayer Perceptron)、PACE Regression(PACE回归)和SVR(SVM 回归)。
模型验证方法为10折交叉验证法,该方法将3 505个数据分成10份,轮流将其中9份作为训练数据,1份作为测试数据,进行试验,每次试验都会得出相应的正确率,10次结果正确率的平均值作为对算法精度的估计。为了对比各个模型的回归效果,选择评价指标如表3所示。
表3 评价指标
Table 3
| 指标名称 | 计算方法 | 说明 |
|---|---|---|
皮尔逊相关系数 R(Pearson Correlation Coefficient) | a是实测值; p是预测值; m是样本数量 | |
平均绝对误差 MAE(Mean Absolute Error) | ||
均方根误差 RMSE(Root Mean Squared Error) | ||
相对平方根误差 RRSE(Root Relative Squared Error) | ||
相对绝对误差 RAE(Relative Absolute Error) |
以上回归模型均使用Weka [40] 软件下的实现方案。实验发现,MLPRegression随着神经元个数的增多,模型趋向非线性,计算时间增长,R逐渐下降;SVR模型随着C值增大,R趋于缓慢增大,但时间复杂度显著增加。LinearRegression和PACE Regression则模型简单相对简单,没有复杂的参数设置影响,且计算复杂性低。
最终,根据评价指标最优原则,经过测试,各模型的主要参数设置如下,Linear Regression的主要参数有,属性选择方法:M5;MLP Regression的主要参数有,激活函数:Sigmoid;隐藏层数量:1层、神经元数量:1(取值范围:1~30个);PACE Regression的主要参数有,估计函数:经验贝叶斯;SVR的主要参数有,核函数:Polynomial kernel、多项式次数:1;C(complexity):3 000(取值范围:1~5 000)。
3.4.2 模型分析
为了深入理解几何、纹理和光谱特征与树高之间的关系,分别使用以上4种方法建立各类特征与树高的回归模型,并使用相应评价指标对比分析不同模型的回归效果。
表4 模型比较(几何特征)
Table 4
| 指标 | Linear Regression | MLP Regression | PACE Regression | SVR |
|---|---|---|---|---|
| R | 0.411 3 | 0.426 9 | 0.411 3 | 0.411 4 |
| MAE | 1.168 7 | 1.155 3 | 1.168 7 | 1.162 5 |
| RMSE | 1.467 9 | 1.456 3 | 1.467 9 | 1.474 8 |
| RRSE | 88.836 7 % | 87.818 8 % | 88.836 7 % | 88.368 5 % |
| RAE | 91.086 3 % | 90.367 6 % | 91.086 3 % | 91.512 6 % |
仅使用面积特征的情况下,所有模型与树高的相关程度都较低,MLP回归模型的精度最高,线性模型、PACE和SVR模型的效果几乎完全相同。
表5 模型比较(纹理特征)
Table 5
| 指标 | Linear Regression | MLP Regression | PACE Regression | SVR |
|---|---|---|---|---|
| R | 0.585 4 | 0.595 7 | 0.584 7 | 0.584 4 |
| MAE | 1.027 8 | 1.017 | 1.028 4 | 1.026 |
| RMSE | 1.305 7 | 1.293 6 | 1.306 6 | 1.311 8 |
| RRSE | 78.129 9 % | 77.306 1 % | 78.174 2 % | 77.986 9 % |
| RAE | 81.019 9 % | 80.269 % | 81.075 8 % | 81.397 7 % |
随着特征数的增多,各模型的相关系数均超过0.58;由于纹理特征与树高关系是非线性,因此MLP取得最高的精度。
表6 模型比较(光谱特征)
Table 6
| 指标 | Linear Regression | MLP Regression | PACE Regression | SVR |
|---|---|---|---|---|
| R | 0.671 8 | 0.779 3 | 0.779 2 | 0.799 6 |
| MAE | 0.951 | 0.801 1 | 0.801 9 | 0.759 2 |
| RMSE | 1.193 | 1.009 3 | 1.009 5 | 0.969 7 |
| RRSE | 72.292 1 % | 60.897 1 % | 60.958 2 % | 57.710 9 % |
| RAE | 74.027 6 % | 62.627 8 % | 62.640 9 % | 60.058 3 % |
SVR线性回归取得的相关系数最高,PACE回归和MLP回归模型取得几乎同样的精度,随着特征数增多,PACE模型显示出超过普通线性模型的优势。
表7 模型比较(几何特征+纹理特征+光谱特征)
Table 7
| 指标 | Linear Regression | MLP Regression | Pace Regression | SVR |
|---|---|---|---|---|
| R | 0.716 1 | 0.813 9 | 0.814 7 | 0.8121 |
| MAE | 0.891 4 | 0.732 4 | 0.732 | 0.736 5 |
| RMSE | 1.124 2 | 0.935 7 | 0.933 9 | 0.940 7 |
| RRSE | 67.761 5% | 55.671 3% | 55.638 3% | 55.981 2% |
| RAE | 69.756 8% | 58.062 9 % | 57.950 8% | 58.370 0% |
随着特征数的增加,所有模型的相关系数也逐渐变大;光谱信息与树高信息相关性最高;其次是纹理信息。SVR、MLP Regression与Pace Regression模型的所有指标均优于LinearRegression,并且三者之间的差别很小。当使用所有特征建模时,PACE回归取得最高的精度,另外,考虑到MLP和SVR最终参数优化结果也是线性模型,说明特征整体上与树高之间为线性关系。
相比较MLP神经网络是个黑箱系统,线性回归模型提供了易于理解的数学公式,可以更方便地对数据结果生成预测。使用PACE 回归通过评估函数对每个特征进行评价,最终,从特征集中选择18个特征建立了树高回归模型。
3.4.3 结果分析
将3 505个胡杨样本特征代入PACE树高回归模型得到预测树高,对比预测值和测量值,R2为0.668 7,RMSE为0.942 6 m(图6)。为了更详细地分析误差分布情况,按不同高度分段计算,4~5 m段,数量:598棵,RMSE:1.153 5 m;6~7 m段,数量:1 541棵,RMSE:0.808 5 m;8~9 m段,数量:1 089棵,RMSE:0.879 1 m;10~13 m段,数量:277棵,RMSE:1.301 8 m。可以看到,误差分布显现两头大、中间小的趋势,在分布最集中的6~9 m高度范围,误差最小。
图6
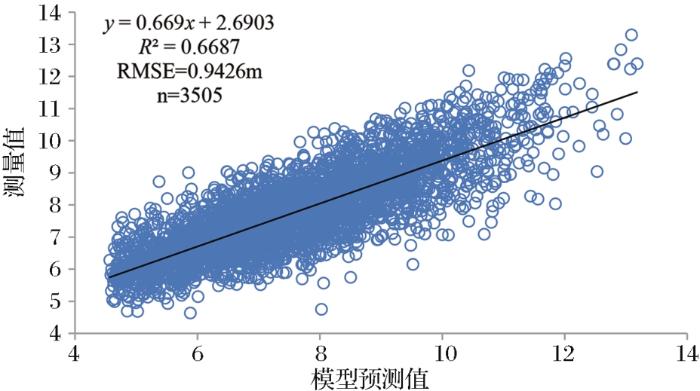
图6
模型预测值与测量值
Fig. 6
Relationship between the oberved and retrieved tree height from regression model
4 结 论
本研究通过WV2高分遥感影像和面向对象分析技术,获取了3 505棵胡杨的特征信息,在无人机获取的CHM树高信息支持下,最终建立树高回归模型。通过研究发现:
(1)可以充分利用高分遥感影像地面分辨率高的优势,使用面向对象分析技术,获取单木尺度的光谱、纹理和几何信息。无人机观测作为小范围获取树高的技术,与高分遥感技术结合使用,可以通过建立回归模型的方式有效获取区域范围的单木树高。同其他遥感技术相比,该组合是一种精度和效率兼顾、同时成本较低的可行技术方案。
(2)随着模型使用特征数的增多,所有模型的R值均呈现增大状态。与普通线性回归模型相比,PACE回归、SVR回归和MLP回归模型均能取得更好的回归效果,当使用所有特征时,10折交叉验证精度R分别为0.814 7、0.812 1和0.813 9;RMSE分别为0.933 9、0.940 7和0.935 7 m。PACE回归模型R值最高,RMSE最小。PACE回归能更好地发现有效特征,其建立的回归模型预测值与实际测量值的R2为0.668 7,RMSE为0.942 6 m。
(3)WV2高分遥感影像中提取的单木光谱和纹理特征与树高有相关性。单木尺度上,光谱特征大多与树高呈现线性关系,纹理信息与树高为非线性关系。
研究中存在一些不足,首先是基于NDVI的胡杨树冠分割算法对于丛生胡杨分割的效果还未达到理想,存在分割树冠范围与实际树冠范围有出入的情况,导致提取的光谱和纹理信息不能准确反映树冠实际对应的情况,造成误差增加;另外,由于WV2数据成像角度的影响,造成对应树高高度值的位置偏差,如何解决这些问题是未来要做的工作。
参考文献
Forest canopy height from the Multi angle Imaging SpectroRadiometer (MISR) assessed with high resolution discrete return LiDAR
[J].
New development of forest canopy height remote sensing
[J].
林分平均高度卫星遥感新进展
[J].
LiDAR and object-based image analysis as tools for monitoring the structural diversity of savanna vegetation
[J].
A global forest canopy height map from the moderate resolution imaging spectroradiometer and the geoscience laser altimeter system
[J].
Mapping of tree position of Larix leptolepis woods and estimation of Diameter at Breast Height (DBH) and biomass of the trees using range data measured by a portable scanning LiDAR
[J].
Retrieval of forest structural parameters using LiDAR remote sensing
[J].
Analysis of forest canopy height based on UAV LiDAR: a case study of Picea Crassifolia in the East and Central of the Qilian Mountains
[J].
基于无人机激光雷达的森林冠层高度分析
[J].
Research progress of forest parameter acquisition based on UAV remote sensing technology
[J].
基于无人机遥感技术的森林参数获取研究进展
[J].
Mango yield mapping at the orchard scale based on tree structure and Land cover assessed by UAV
[J].
Tree height extraction using High-resolution imagery acquired from an Unmanned Aerial Vehicle(UAV). Journal of Beijing Forestry University
[J].
Robust Parameter Estimation using dual baseline polarimetric SAR Inter-ferometry
[C]∥ Geoscience and Remote Sensing Symposium,
Three-stage inversion process for polarimetric SAR interferometry
[J].
Estimation of forest biomass from L-band polarimetric decomposition components
[C]∥
Improved three-stage algorithm of rree height retrieval with PolInSAR data
[J].
利用POLInSAR 数据反演植被高度的改进三阶段算法
[J].
Estimation of forest canopy height using ortho image-refined digital elevation models
[J].
Investigation on decorrelation in processing of D-InSAR
[J].
D-InSAR 处理中失相干问题的研究
[J].
Forest-height Inversion using repeat-pass spaceborne PolInSAR data
[J].
A study on the dxtraction of the stand description factors from high resolution remote sensing images
[D].
基于高分辨率遥感林分调查因子的提取研究
[D].
Review on forest height estimation using remote sensing
[J].
森林高度遥感估测研究综述
[J].
Extraction of individual tree height using QuickBird images based on Tree Shadow
[J].
基于树影与快鸟图像的单木树高提取
[J].
Extraction of forest height by using GF-2 cross track stereo images
[J].
高分二号异轨立体数据的森林高度提取
[J].
A method of mean forest height fast extraction from GeoEye-1 stereo pairs data
[J].
一种基于GeoEye-1立体像对数据的快速提取平均树高方法
[J].
Estimation of forest structural parameters using 5 and 10 meter SPOT-5 satellite data
[J].
Using LiDAR to compare forest height estimates from IKONOS and Landsat ETM+ data in Sitka Spruce plantation forests
[J].
Textural features for image classification
[J].
A multiscale geographic object-based image analysis to estimate LiDAR-measured forest canopy height using Quickbird imagery
[J].
Using spectral and textural features from RapidEye images to estimate age and structural parameters of cerrado vegetation
[J].
Pine plantation structure mapping using WorldView2 multispectral image
[J].
Remote sensing quantitative evaluation of vegetation restoration in the lower reaches of Tarim River
[D].
塔里木河下游植被恢复遥感定量评估研究
[D].
Tree height distribution and density of populus euphratica forest along the Argan Section in the lower reaches of Tarim River
[J].
塔里木河下游阿拉干断面胡杨树高的分布和密度
[J].
Abstraction and analysis of tree-crown of forest land based on QuickBird image in the lower reaches of Tarim River
[J].
塔里木河下游林地树冠QuickBird 影像信息提取与分析
[J].
Landuse classification of high-resolution remote sensing image based on ecognition object-oriented technology
[J].
基于eCognition面向对象技术的高分辨率遥感影像土地利用分类—以福州琅岐岛为例
[J].
Application of object-oriented ecognition remote sensing image classification and recognition technology
[J].
面向对象的eCognition遥感影像分类识别技术应用
[J].
Prediction of software project effort using Linear Regression model
[J].
Modeling for optimal probability prediction
[C]∥
Machine learning in the prediction of cardiac epicardial and mediastinal fat volumes
[J].
Improvements to the SMO algorithm for SVM regression
[C]∥
WEKA: a Machine Learning Workbench
[C]∥

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}