




1 引 言
环北极泰加林—苔原过渡带横跨北美、斯堪的纳维亚半岛、欧亚大陆,绵延超过13 400 km,将南部泰加林与北部无树苔原分隔开来,是世界上最长的植被过渡区[1],也是气候变化的一个重要指示因子。在过去的30年间,全球表面温度每10 a上升约0.2℃[2],北极地区的平均气温上升速度是其他地区的两倍[3]。气候变化可以影响物种物候,改变区域物种组成,导致物种分布范围迁移[4]。全北极范围内,灌木正向苔原不断扩张[5]。实验表明,气候变暖会导致许多苔原地区落叶灌木和禾本科植物的高度和覆盖度增加,苔藓和地衣覆盖度降低,物种多样性下降[6]。同时,北方森林和苔原生态系统也可以通过改变其碳储量、反照率和水文影响气候[7]。因此,泰加林—苔原过渡带的位置确定对理解北极地区气候变化至关重要。
泰加林—苔原过渡带纬度高、东西跨度广,人类难以接近,数据采集难度大。相比于传统测量手段,遥感技术可以高效、可靠地获取过渡带的土地覆盖情况,并对其开展研究。MODIS、Landsat等卫星的中等分辨率遥感影像可以相对准确地区分过渡带的植被覆盖类型,识别森林和非森林区域[8-10],但是无法识别单棵树木,因此树木线的定义需要根据遥感影像估计的统计参数确定,然而这些参数的最优标准有待确定[11]。随着遥感技术的发展,高分辨率遥感技术和激光雷达遥感技术开始应用到泰加林—苔原过渡带的研究中,探究过渡带区域森林线提取[12]、森林边缘提取的尺度效应[13]、树木检测[14]等问题,虽然并未提取出过渡带,但大大提高了对过渡带细节的刻画能力。
前人已经利用多源遥感数据对泰加林—苔原过渡带边界提取进行了很多尝试。Kimball等[15]对航空影像目视解译,绘制过渡带植被结构图并手动勾勒过渡带边界。Alberto Diaz-Varela等[16]在对航空影像目视解译的基础上,提出使用前哨算法提取过渡带边界,并揭示了1957~2003年间研究区内过渡带边界的变化趋势。Hofgaard等[17]使用光谱解混法对过渡带影像进行分类,并手动勾画森林线和树线。这些纯手动或半自动化的过渡带边界提取方法依赖解译者的经验知识,且费时费力。Ranson等[18]将MODIS树冠覆盖度数据产品进行分割,并基于分割后对象的树冠覆盖度和标准偏差定义硬阈值划分过渡带,由此生成500 m分辨率环北极泰加林—苔原过渡带。Walther等[19]利用MODIS数据产品、数字高程模型(Digital Elevation Model,DEM)、生物气候数据等多类数据,利用随机森林算法将研究区分为典型苔原、南部苔原和森林,并计算南部苔原的连续概率值,重新定义南部苔原概率大于50%的区域为过渡带。Walther等[19-20]对森林—苔原过渡带提取的相关研究进行了汇总。
当前,关于泰加林—苔原过渡带的提取大多基于光学影像,然而森林、过渡带和苔原均具有植被光谱特征,易发生混淆。此外,激光雷达技术在泰加林-苔原过渡带提取的研究较少。在森林向苔原逐渐过渡的过程中,植被高度逐渐降低,激光雷达技术在获取植被三维信息方面有巨大优势,可以帮助更加准确地描绘过渡带植被群落结构。
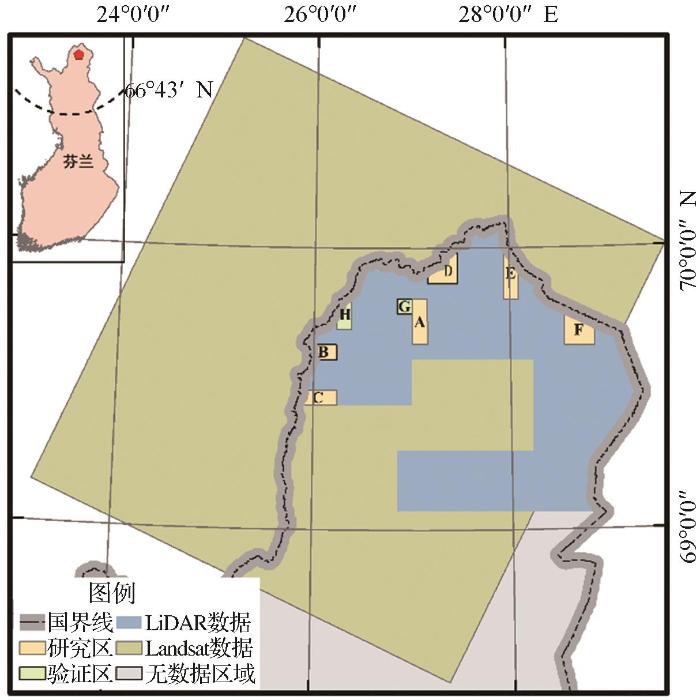
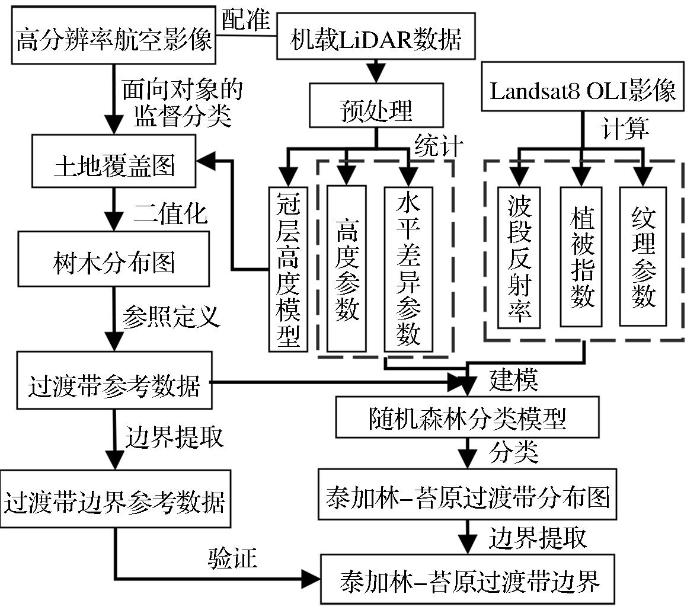
选取芬兰北部泰加林—苔原过渡带为研究区,该区域位于69°3′9″~70°5′27″ N,是环北极泰加林—苔原过渡带的重要组成部分。以基于高分辨率航空影像和冠层高度模型生成的泰加林—苔原过渡带为参考数据,构建基于Landsat 8 OLI影像和机载LiDAR数据的泰加林—苔原过渡带提取方法,弥补Landsat数据在树木识别上的缺陷,提高过渡带提取精度,并为后续过渡带监测提供基准数据。
2 数据与研究区
2.1 研究区概况
图1
2.2 实验数据
2.2.1 高分辨率正射航空遥感影像
高分辨率正射航空遥感影像作为本次实验的参考数据,获取于芬兰国家土地调查公开数据网站(https:∥tiedostopalvelu.maanmittauslaitos.fi/tp/kartta?lang=en),该数据以飞机为遥感平台,获取于2014~2019年间。森林前进或后退可能发生在几十年至几百年之间,单个树木的长成或外观改变也至少需要几年至几十年[19],因此本文中数据获取的时间差异对过渡带提取的影响忽略不计。高分辨率正射遥感影像的空间分辨率为0.5 m,包含蓝、绿、红、近红外4个波段,位置精度约为0.5~2 m。
2.2.2 机载LiDAR数据
本研究使用的机载LiDAR数据为三维点状数据,同样获取于为芬兰国家土地调查公开数据网站。该数据由飞机搭载徕卡ALS 50、ALS 70-HP、ALS 80-HP等扫描仪扫描得到,飞机飞行高度约为2 500 m,数据采集时间为2014~2019年,点云密度约为0.9~1.2点每平方米,垂直精度约为0.15 m,LiDAR数据覆盖范围如图1所示。
2.2.3 Landsat 8 OLI影像数据
Landsat 8 OLI影像数据为L2级数据产品——地表反射率,该产品经过辐射校正和几何校正,可直接使用,获取于美国地质勘探局(United States Geological Survey, USGS)官网(https:∥earthexplorer.usgs.gov)。研究区多云,影像大多被云覆盖,难以获取地表信息。综合考虑影像获取时间、云覆盖情况,选取2016年8月18日(夏季)和2019年4月5日(春季)两景影像进行实验,两景影像的云覆盖度分别为0.67%和0%。影像条带号为193,行号为11,Landsat影像数据覆盖范围如图1所示。
2.2.4 其他数据
芬兰水文矢量数据,包含芬兰境内河流、湖泊,同样获取于芬兰国家土地调查公开数据网站。
3 研究方法
3.1 数据预处理
3.1.1 点云数据预处理
在CloudCompare软件中,对点云去噪。设置邻域点个数为10个,标准差倍数为5,对每个点进行邻域分析,计算每个点到10个邻域点的平均距离,假设平均距离是高斯分布,可以计算得到均值
3.1.2 数据配准
使用ArcGIS 10.2软件,以CHM为基准数据,对高分辨率影像进行配准。均匀选取房屋墙角点或电线杆脚点作为控制点,使用一阶仿射变换,将高分辨率影像配准到CHM上,确保总体均方误差(Root Mean Square, RMS)均小于0.25 m。
3.2 过渡带参考数据生成
3.2.1 土地覆盖类型确定
影像分割后,在研究区内均匀选取典型分类样本对象,并将原始波段反射率、植被指数和冠层高度作为特征进行分类。使用最近邻分类方法,将研究区分类为树木、苔原、裸地、水体、阴影5大类。分类后,将平均高度大于2 m的阴影对象重分类为树木,减少阴影遮挡对分类精度的影响;将高度最大值小于2 m的对象从树木类中剔除,消除矮灌木对树木分类精度的影响。将分类结果二值化为树和非树,并对分类结果进行精度检验。
Winings[20]的研究表明当窗口大小为1 000 m2时最能代表周围区域的冠层覆盖情况。因此,实验使用31.5 m×31.5 m的移动窗口扫描树木分类结果,计算研究区树木覆盖度(Cover),树木覆盖度计算公式如下:
其中:
根据森林和过渡带的定义,将树木覆盖度大于30%、面积大于5 000 m2的区域定义为森林,将覆盖度大于0且小于等于30%的区域定义为过渡带,其余无树木覆盖区域为苔原。
3.2.2 过渡带边界提取
MATLAB boundary函数[29]可以返回连通区域边界点的位置坐标,从而实现提取连续森林的边界——森林线(forest line),作为过渡带的下边界;提取树木生长的极限——树线(tree line),作为过渡带的上边界。对Matlab提取结果进行目视解译并修正,从而确定最终的过渡带边界。
3.2.3 过渡带边界精度检验
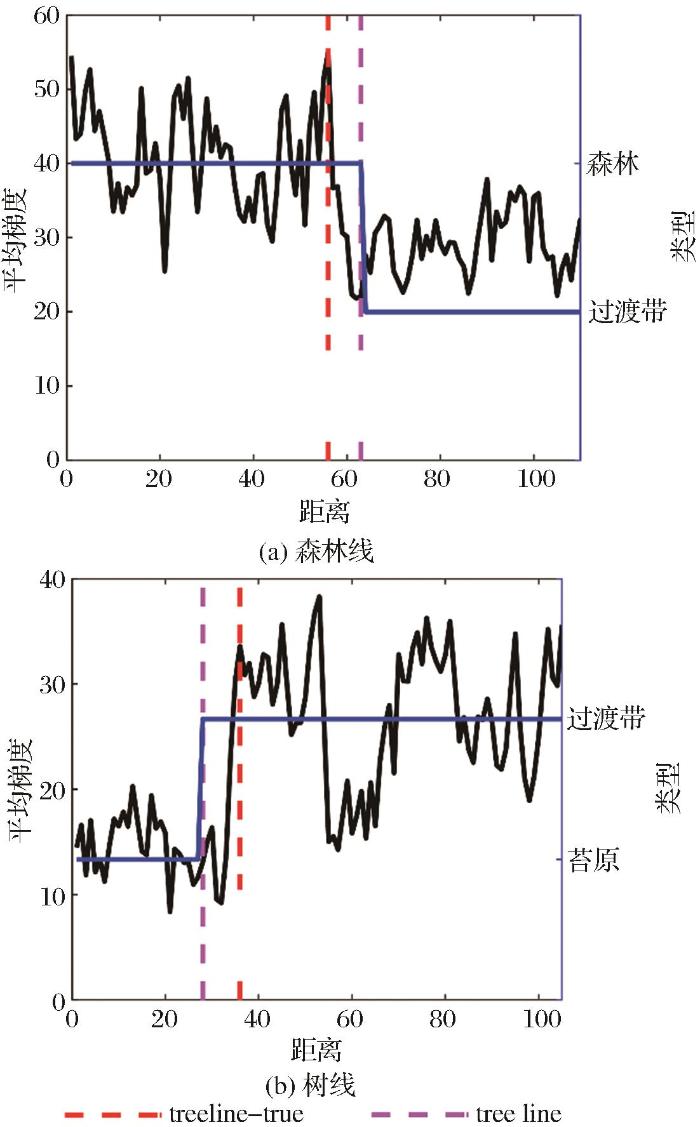
Wulder等[30]提出使用图像梯度法评估边缘标记的有效性,图像梯度法中图像梯度会在边界处达到峰值。图像梯度的计算公式如下:
其中:
图2
3.3 基于Landsat 8和机载LiDAR数据的过渡带提取
表1 Landsat 8影像参数
Table 1
| 序号 | 参数 | 描述 | 序号 | 参数 | 描述 |
|---|---|---|---|---|---|
| 原始反射率 | 15 | EVI | 增强型植被指数 | ||
| 1 | B1 | Band 1反射率 | 11 | GNDVI | 绿色归一化植被指数 |
| 2 | B2 | Band 2反射率 | 12 | OSAVI | 土壤调节植被指数 |
| 3 | B3 | Band 3反射率 | 13 | TVI | 三角植被指数 |
| 4 | B4 | Band 4反射率 | 纹理参数 | ||
| 5 | B5 | Band 5反射率 | 16 | texture_mean | 均值 |
| 6 | B6 | Band 6反射率 | 17 | texture_variance | 标准差 |
| 7 | B7 | Band 7反射率 | 18 | texture_contrast | 对比度 |
| 植被指数 | 19 | texture_correlation | 相关性 | ||
| 8 | DVI | 差值植被指数 | 20 | texture_dissimilarity | 相异性 |
| 9 | RVI | 比值植被指数 | 21 | texture_entropy | 信息熵 |
| 10 | NDVI | 归一化植被指数 | 22 | texture_homogeneity | 协同性 |
| 14 | ARVI | 大气阻抗植被指数 | 23 | texture_secondmonent | 二阶矩 |
表2 LiDAR统计参数
Table 2
| 序号 | 名称 | 描述 | |
|---|---|---|---|
| 高度参数 | 1 | var | 方差 |
| 2 | stdv | 标准差 | |
| 3 | skew | 偏度 | |
| 4 | med | 中值 | |
| 5 | mean | 均值 | |
| 6 | max | 最大值 | |
| 7 | kurt | 峰度 | |
| 8 | iqr | 四分位间距,75th高度百分位数和25th高度百分位数之差 | |
| 9 | cv | 变异系数,所有点高度的变异系数 | |
| 10-18 | prctile_90、prctile_80……prctile_10 | 高度百分位数,点云由低到高排列,高度前90%、80%……10%的点所在的高度 | |
| 水平差异参数 | 19 | CHM_slope | 冠层高度模型的坡度 |
| 20 | texture_mean_las | 冠层高度模型的纹理均值 | |
| 21 | texture_variance_las | 冠层高度模型的纹理标准差 | |
| 22 | texture_contrast_las | 冠层高度模型的纹理对比度 | |
| 23 | texture_correlation_las | 冠层高度模型的纹理相关性 | |
| 24 | texture_dissimilarity_las | 冠层高度模型的纹理相异性 | |
| 25 | texture_entropy_las | 冠层高度模型的纹理信息熵 | |
| 26 | texture_homogeneity_las | 冠层高度模型的纹理协同性 | |
| 27 | texture_secondmonent_las | 冠层高度模型的纹理二阶矩 |
实验在6个研究区共生成个7 282随机样本点,按照3∶1的比例,将其中5 464个样本点作为实验数据集,构建随机森林分类模型,1 818个样本点作为验证数据集,检验随机森林模型分类精度。
初始随机森林分类器的输入变量为全部影像参数和点云参数,然而过多的参数会增加运算时间,甚至降低分类精度。实验计算每个参数因为袋外数据(Out of Bag, OOB)置换而导致的分类误差增量,评估参数重要性,分类误差增量越大,参数越重要。
实验依次将参数重要性表中前
图3
随机森林分类精度与森林中任意两棵树的相关性和每棵树的分类能力有关。任意两棵树相关性越大,分类精度越低;每棵树的分类能力越强,分类精度越高。而每个节点处随机抽取的变量个数m会影响森林中树的相关性和每棵树的分类能力,m越大,树的相关性和每棵树的分类能力会降低;反之,二者增大。因此选择最优的m对随机森林分类器至关重要。实验尝试不同的m值构建随机森林分类器。同样,当验证数据集的Kappa系数最大时,m为最优的每个节点处随机抽取的变量个数。
最终,分别确定基于Landsat 8春季影像(RF_ Spring)、基于Landsat8夏季影像(RF_Summer)、基于Landsat8春季影像和LiDAR数据(RF_Spring_Las)、基于Landsat8夏季影像和LiDAR数据(RF_Summer_Las)的最优随机森林分类模型。
分别使用4个最优随机森林分类模型将研究区分类为森林、过渡带和苔原。根据森林定义,将分类结果中面积小于5 000 m2的图斑合并到周围类中,以消除“椒盐”现象对过渡带提取的影响。使用MATLAB boundary函数提取过渡带上边界和下边界—树线和森林线。分别在提取的森林线和树线上生成
其中:int函数为向下取整函数;
4 结 果
4.1 过渡带参考数据
图4
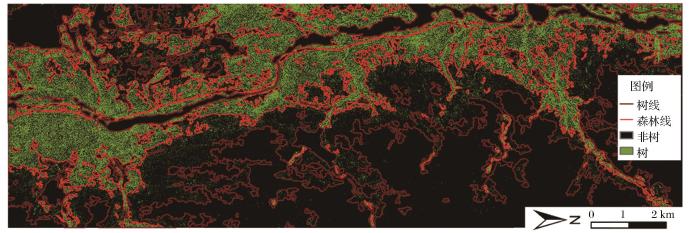
图4
树木提取结果及过渡带参考边界
Fig.4
Tree extraction result and ecotone reference boundaries
表3 树木分类结果精度检验
Table 3
| 参考数据(像素) | 总体精度 /% | ||||
|---|---|---|---|---|---|
| 区域 | 类别 | 树 | 非树 | ||
分类数据 (像素) | 研究区A | 树 | 272 | 28 | 90.83 |
| 非树 | 27 | 273 | |||
| 研究区B | 树 | 263 | 37 | 92.67 | |
| 非树 | 7 | 293 | |||
| 研究区C | 树 | 270 | 30 | 92.00 | |
| 非树 | 18 | 282 | |||
| 研究区D | 树 | 274 | 26 | 93.33 | |
| 非树 | 14 | 286 | |||
| 研究区E | 树 | 270 | 30 | 92.33 | |
| 非树 | 16 | 284 | |||
| 研究区F | 树 | 266 | 34 | 93.33 | |
| 非树 | 6 | 294 | |||
| 验证区G | 树 | 282 | 18 | 94.67 | |
| 非树 | 14 | 286 | |||
| 验证区H | 树 | 260 | 40 | 92.67 | |
| 非树 | 4 | 296 | |||
表4 参考森林线和树线位置精度
Table 4
| 研究区 | 位置误差(单位:m) | ||||
|---|---|---|---|---|---|
| 均值 | 标准差 | 最小值 | 最大值 | ||
| 森林线 | A | 2.36 | 2.64 | 0.00 | 14.50 |
| B | 2.65 | 2.11 | 0.00 | 8.00 | |
| C | 2.91 | 2.42 | 0.00 | 10.00 | |
| D | 2.73 | 3.02 | 0.00 | 14.50 | |
| E | 2.88 | 2.78 | 0.00 | 12.00 | |
| F | 3.06 | 2.66 | 0.00 | 9.00 | |
| 树线 | A | 2.05 | 1.54 | 0.00 | 7.00 |
| B | 2.66 | 2.51 | 0.00 | 12.50 | |
| C | 2.77 | 2.19 | 0.00 | 10.50 | |
| D | 3.35 | 2.81 | 0.00 | 10.50 | |
| E | 3.04 | 2.34 | 0.00 | 7.00 | |
| F | 2.82 | 2.16 | 0.00 | 6.50 | |
4.2 基于Landsat8和机载LiDAR数据的过渡带提取结果
4.2.1 最优随机森林分类模型参数
表5为基于不同输入数据构建的最优随机森林分类模型的主要参数。当决策树个数为100时,RF_Spring、RF_Summer、RF_Summer_Las3个模型错分误差值趋于稳定。当决策树个数为80时,RF_Spring_Las模型错分误差值趋于稳定。基于Landsat 8和LiDAR参数的RF_Spring_Las模型和RF_Summer_Las模型分类精度较高,验证数据集分类的总体精度分别为94.66%、94.44%,Kappa系数分为0.92、0.98,明显优于基于Landsat 8参数的RF_Spring模型和RF_Summer模型。
表5 随机森林分类模型参数及分类精度
Table 5
| 模型 | 决策树个数 | 输入参数个数n | 每个节点处 随机抽取的 变量个数m | Kappa 系数 | 总体 精度 OA |
|---|---|---|---|---|---|
| RF_Spring | 100 | 7 | 3 | 0.77 | 84.87% |
| RF_Summer | 100 | 14 | 10 | 0.68 | 78.93% |
| RF_Spring_Las | 80 | 22 | 19 | 0.92 | 94.66% |
| RF_Summer_Las | 100 | 18 | 7 | 0.98 | 94.44% |
表6 RF_Spring模型输入参数
Table 6
| 序号 | 参数 | 重要性 | 序号 | 参数 | 重要性 |
|---|---|---|---|---|---|
| 1 | B6_spring | 3.15 | 5 | GNDVI_spring | 2.11 |
| 2 | B1_spring | 2.36 | 6 | texture_mean_spring | 1.76 |
| 3 | EVI_spring | 2.29 | 7 | ARVI_spring | 1.75 |
| 4 | B7_spring | 2.27 |
表7 RF_Summer模型输入参数
Table 7
| 序号 | 参数 | 重要性 | 序号 | 参数 | 重要性 |
|---|---|---|---|---|---|
| 1 | B4_summer | 2.38 | 8 | NDVI_summer | 1.44 |
| 2 | ARVI_summer | 1.88 | 9 | texture_mean_summer | 1.38 |
| 3 | B7_summer | 1.71 | 10 | DVI_summer | 1.29 |
| 4 | TVI_summer | 1.68 | 11 | B6_summer | 1.24 |
| 5 | B5_summer | 1.56 | 12 | B1_summer | 1.17 |
| 6 | RVI_summer | 1.54 | 13 | B2_summer | 1.13 |
| 7 | B3_summer | 1.47 | 14 | GNDVI_summer | 1.03 |
表8 RF_Spring_Las模型输入参数
Table 8
| 序号 | 参数 | 重要性 | 序号 | 参数 | 重要性 |
|---|---|---|---|---|---|
| 1 | texture_mean_las | 1.66 | 12 | texture_dissimilarity_las | 0.87 |
| 2 | B6_spring | 1.12 | 13 | texture_variance_spring | 0.86 |
| 3 | h_var | 1.11 | 14 | texture_variance_las | 0.85 |
| 4 | texture_contrast_las | 1.07 | 15 | DVI_spring | 0.82 |
| 5 | h_stdv | 0.99 | 16 | prctile_80 | 0.81 |
| 6 | h_med | 0.96 | 17 | prctile_90 | 0.80 |
| 7 | prctile_60 | 0.96 | 18 | B1_spring | 0.80 |
| 8 | prctile_70 | 0.92 | 19 | h_max | 0.80 |
| 9 | h_mean | 0.91 | 20 | texture_homogeneity_las | 0.78 |
| 10 | h_iqr | 0.89 | 21 | texture_entropy_las | 0.77 |
| 11 | B7_spring | 0.87 | 22 | h_kurt | 0.74 |
表9 RF_Summer_Las模型输入参数
Table 9
| 序号 | 参数 | 重要性 | 序号 | 参数 | 重要性 |
|---|---|---|---|---|---|
| 1 | texture_mean_las | 2.24 | 10 | h_skew | 0.86 |
| 2 | h_med | 1.19 | 11 | B4_summer | 0.85 |
| 3 | prctile_60 | 1.09 | 12 | prctile_90 | 0.84 |
| 4 | h_stdv | 1.08 | 13 | texture_homogeneity_las | 0.82 |
| 5 | h_kurt | 0.97 | 14 | B7_summer | 0.79 |
| 6 | h_var | 0.95 | 15 | NDVI_summer | 0.79 |
| 7 | h_mean | 0.92 | 16 | RVI_summer | 0.79 |
| 8 | h_max | 0.91 | 17 | TVI_summer | 0.79 |
| 9 | GNDVI_summer | 0.88 | 18 | DVI_summer | 0.76 |
基于Landsat 8和LiDAR数据的RF_Spring_Las模型和RF_Summer_Las模型有7个公共输入参数,分别为DVI、texture_mean_las、h_med、h_stdv、h_var、prctile_60、prctile_90。RF_Spring_Las模型最重要的3个输入参数分别为texture_mean_las、B6_spring、h_var,均为基于LiDAR数据的参数。RF_Summer_Las模型最重要的3个输入参数分别为texture_mean_las、h_med、prctile_60,也均为基于LiDAR数据的参数。
4.2.2 过渡带分类结果及边界提取
图5
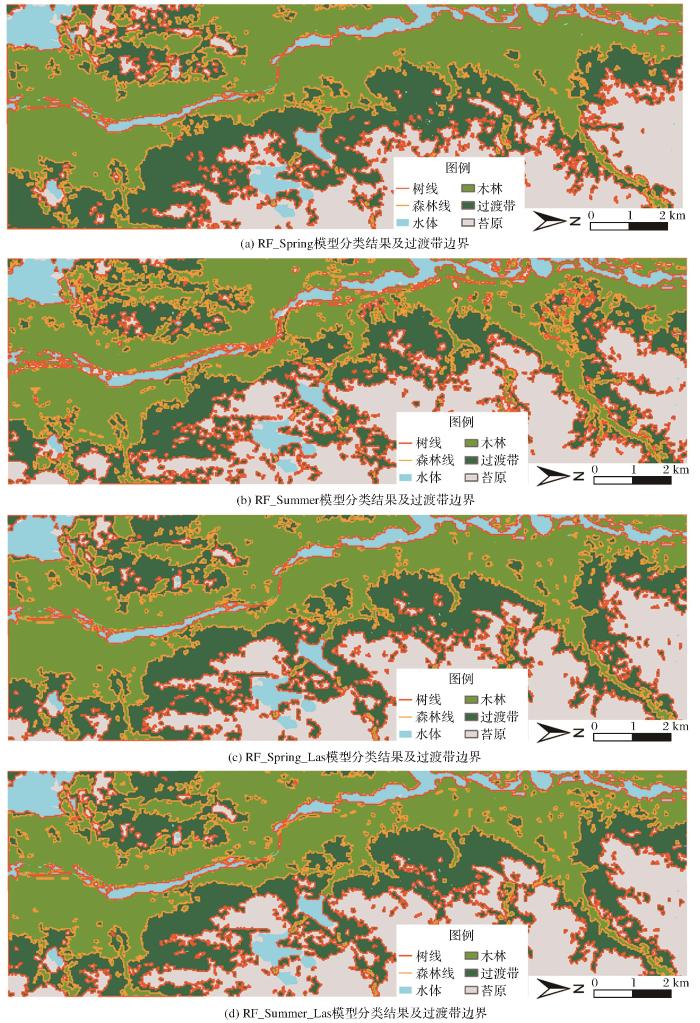
图5
研究区A随机森林分类结果及过渡带边界
Fig.5
Classification results of random forest models and ecotone boundaries in study area A
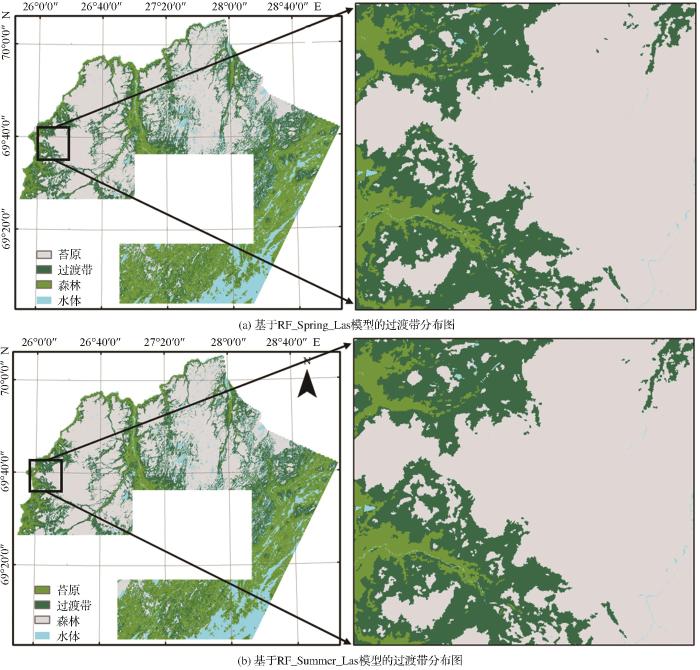
图6为基于RF_Spring_Las模型和RF_Summer_Las模型的芬兰北部泰加林—苔原过渡带分布图,两个模型提取的过渡带走势和分布高度相似,描绘了芬兰北部泰加林—苔原过渡带分布情况。
图6
4.2.3 精度检验
表10 基于随机森林分类结果的森林线和树线位置误差
Table 10
| 模型 | 区域 | 森林线位置误差/m | 树线位置误差/m | ||||
|---|---|---|---|---|---|---|---|
| 均值 | 标准差 | 位置误差均值 | 均值 | 标准差 | 位置误差均值 | ||
| RF_Spring | A | 27.33 | 44.63 | 24.95 | 74.19 | 123.08 | 85.46 |
| B | 17.61 | 22.34 | 88.07 | 192.20 | |||
| C | 14.44 | 15.76 | 82.41 | 150.35 | |||
| D | 19.79 | 30.29 | 57.70 | 78.32 | |||
| E | 26.53 | 40.69 | 64.16 | 91.86 | |||
| F | 18.79 | 20.93 | 45.81 | 79.48 | |||
| G | 30.10 | 65.05 | 119.60 | 168.19 | |||
| H | 45.01 | 57.99 | 151.74 | 160.22 | |||
| RF_Summer | A | 52.81 | 101.42 | 75.05 | 113.89 | 172.25 | 133.90 |
| B | 54.53 | 86.29 | 128.63 | 297.55 | |||
| C | 87.80 | 156.34 | 92.55 | 116.85 | |||
| D | 100.18 | 322.29 | 263.18 | 565.35 | |||
| E | 100.37 | 192.44 | 72.18 | 113.35 | |||
| F | 45.42 | 77.59 | 57.26 | 80.85 | |||
| G | 80.00 | 145.19 | 150.19 | 247.91 | |||
| H | 79.30 | 169.84 | 193.32 | 243.90 | |||
| RF_Spring_Las | A | 18.41 | 28.49 | 25.13 | 46.04 | 89.25 | 43.11 |
| B | 22.71 | 27.44 | 34.61 | 84.78 | |||
| C | 23.13 | 29.87 | 51.57 | 89.27 | |||
| D | 22.18 | 29.44 | 26.17 | 45.13 | |||
| E | 23.32 | 40.30 | 22.67 | 53.40 | |||
| F | 15.90 | 29.93 | 17.23 | 33.02 | |||
| G | 20.34 | 26.75 | 76.56 | 149.09 | |||
| H | 55.05 | 62.47 | 69.99 | 103.84 | |||
| RF_Summer_Las | A | 18.06 | 28.13 | 25.11 | 47.10 | 90.98 | 44.80 |
| B | 23.68 | 33.14 | 33.38 | 79.84 | |||
| C | 20.73 | 25.75 | 47.72 | 78.12 | |||
| D | 25.95 | 33.61 | 27.40 | 45.76 | |||
| E | 27.75 | 55.76 | 29.26 | 66.42 | |||
| F | 15.53 | 29.89 | 17.48 | 34.18 | |||
| G | 20.28 | 32.21 | 74.03 | 149.53 | |||
| H | 48.92 | 55.07 | 82.05 | 115.13 | |||
由表10可知,基于RF_Spring模型、RF_Spring_Las模型和RF_Summer_Las模型的森林线位置精度较高,位置误差分别为24.95 m、25.13 m、25.11 m,远小于基于RF_Summer模型的森林线位置误差(75.05 m)。基于RF_Spring_Las模型和RF_Summer_Las模型的树线位置精度较高,位置误差分别为43.11 m和44.80 m,远小于基于RF_Spring和RF_Summer模型的树线位置误差(分别为85.46 m和133.90 m)。
综上所述,基于Landsat 8影像和LiDAR数据的过渡带边界位置精度高于只基于Landsat 8影像的过渡带边界位置精度,RF_Spring_Las模型和RF_Summer_Las模型是较优的随机森林过渡带分类模型。
5 讨 论
本研究构建了一种基于随机森林分类模型的泰加林-苔原过渡带提取方法,有较高的提取精度,但仍有许多不足之处。
首先,使用的随机森林分类模型是一种黑盒模型,虽然随机森林可以评估每个参数的重要性,但是每个参数具体如何影响分类结果却未可知;本研究构建100棵分类树的随机森林,分类树棵树的增加,一定程度上提高了分类精度,但是分类花费的时间也相应增加,尤其是对于输入参数较多的两个模型(RF_Spring_Las模型和RF_Summer_Las模型输入参数分别为22个和18个),已有的输入参数可以帮助模型实现最优分类精度,但大大增加了算法运行时间。接下来可以继续优化输入参数、分类树数量,在分类精度和分类时间之间谋求平衡。
其次,以芬兰北部泰加林—苔原过渡带为研究区开展实验,构建的过渡带提取方法在实验区域有较高的精度,然而该方法在其他泰加林—苔原过渡区域的适用性还有待进一步研究。此外,高纬度地区严重的云覆盖对该方法的使用有一定限制,接下来可以探究使用对云有穿透能力的合成孔径雷达或星载激光雷达补充获取云覆盖区域的地表数据,弥补光学影像易受云影响的不足。
最后,实验构建的基于Landsat 8影像和机载LiDAR数据的过渡带提取方法,受限于机载LiDAR数据获取成本高,难以实现环北极泰加林—苔原过渡带提取。
因此,在今后的研究中还要继续探索和改进使用中等分辨率卫星遥感数据提取过渡带的方法,提高提取精度,降低数据成本,实现大范围应用。
基于Landsat 8春季影像提取的森林线和树线位置误差(分别为24.95 m和85.46 m)远小于基于Landsat 8夏季影像提取的森林线和树线位置误差(分别为75.05 m和133.09 m),这可能因为研究区春季气温较低,积雪尚未融化,苔原仍被积雪覆盖,而常绿树生长区域的光谱仍然呈现出较典型的植被特征,可以帮助区分无树木苔原和树木生长区域,提高过渡带提取精度。这为今后环北极泰加林—苔原过渡带提取研究提供一种新思路,可以尝试使用春季影像开展研究,而不是植被覆盖研究中最常使用的夏季影像,从而提高泰加林—苔原过渡带提取精度。
6 结 论
实验以芬兰北部泰加林—苔原过渡带为研究区,依据过渡带定义,使用高分辨率航空遥感影像和冠层高度模型生成过渡带参考数据。依据参考数据,构建基于Landsat 8影像和机载LiDAR数据的随机森林分类模型,并在过渡带分类的基础上提取过渡带边界,具体结论如下:
(1)基于Landsat 8春季影像和机载LiDAR数据的随机森林分类模型(RF_Spring_Las)和基于Landsat 8夏季影像和机载LiDAR数据的随机森林分类模型(RF_Summer_Las)的分类精度优于基于Landsat8影像的随机森林分类模型(RF_Spring、RF_Summer)。
(2)基于RF_Spring_Las模型的过渡带上、下边界提取精度分别为43.11 m、25.13 m,基于RF_ Summer_Las模型的过渡带上、下边界提取精度分别为44.80 m、25.11 m,实现过渡带边界精细提取。
实验构建基于Landsat 8影像和机载LiDAR数据的芬兰北部泰加林—苔原过渡带提取算法,可以更加准确描绘过渡带植被群落,实现春季、夏季两个季节的过渡带自动提取,为后续过渡带位置变化监测奠定基础。
参考文献
The Tundra-Taiga interface and its dynamics: concepts and applications
[J].
Global temperature change
[J].
Plants in a warmer world
[J].
The evidence for shrub expansion in Northern Alaska and the Pan-Arctic
[J].
Plant community responses to experimental warming across the Tundra Biome
[J].
Boreal forest and Tundra ecosystems as components of the climate system
[J].
Representation of an Alpine Treeline dcotone in SPOT 5 Hrg data
[J].
Forest-Tundra ecotone response to climate change in the Western Sayan Mountains, Siberia
[J].
Assessing Tundra-Taiga boundary with multi-sensor satellite data
[J].
How can the dynamics of the Tundra-Taiga boundary be femotely monitored?
[J].
Post-Fire tree establishment patterns at the Alpine Treeline Ecotone: mount Rainier National Park, Washington, USA
[J].
Characterisation of Arctic Treelines by Lidar and multispectral imagery
[J].
Using airborne laser scanning to monitor tree migration in the Boreal-Alpine transition zone
[J].
Alpine vegetation communities and the Alpine-Treeline ecotone boundary in New England as biomonitors for climate change
[C]∥
Spatio-temporal analysis of Alpine Ecotones: a spatial explicit model targeting altitudinal vegetation shifts
[J].
Latitudinal forest advance in Northernmost Norway since the early 20th century
[J].
Object-based mapping of the circumpolar Taiga-Tundra ecotone with MODIS tree cover
[J].
Modelling the Arctic Taiga-Tundra ecotone using Alos Palsar and optical earth observation data
[J].
Mapping alpine treeline with high resolution imagery and Lidar data in North Cascades National Park, Washington
[D].
Towards 3d point cloud based object maps for household environments
[J].
Digital forestry toolbox for Matlab/Octave
.[EB/OL].
The forest tundra and present treelines of the Northern Quebec-Labrador Peninsula
[J].
Pace and pattern of recent treeline dynamics: response of ecotones to climatic variability in the Spanish Pyrenees
[J].
Pine (Pinus Sylvestris) tree-limit surveillance during recent decades, central Sweden
[J].
Mapping tree species composition in South African Savannas using an integrated airborne spectral and Lidar system
[J].
Mapping canopy gaps in an indigenous subtropical coastal forest using high-resolution Worldview-2 data
[J].
Forest stand identification based on ecognition software using Quickbird remote sensing image: a case of jiangle forest farm in Fujian province
[J].
基于易康软件的QuickBird遥感影像林分类型识别——以福建省将乐林场为例
[J],
An approach for edge matching large-area satellite image classifications
[J].
Random forest classification of Landsat 8 imagery for the complex terrain area based on the combination of spectral, topographic and texture information
[J].
随机森林方法支持的复杂地形区土地利用/土地覆被分类研究
[J],
Effects of pre-processing methods on Landsat Oli-8 land cover classification using obia and random forests classifier
[J].
Forest vegetation classification of Landsat 8 remote sensing image based on random forests model
[J].
基于随机森林模型的陆地卫星-8遥感影像森林植被分类
[J],
Assessment of forest structure with airborne Lidar and the effects of platform altitude
[J].
Plot-level forest height inversion using airborne Lidar data based on the random forest
[J].
随机森林算法在机载LiDAR数据林分平均树高估算中的应用研究
[J],
An assessment of the repeatability of automatic forest inventory metrics derived from Uav-Borne Laser scanning data
[J].
Research on remote sensing Mmnitoring technology of forest land dynamic change in Tianshui in recent 30 years
[J].
Random forest in remote sensing: a review of applications and future directions
[J].
Classification of China small satellite remote sensing image based on random forests
[J].
基于随机森林的国产小卫星遥感影像分类研究
[J],
An assessment of the effectiveness of a random forest classifier for land-cover classification
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}