




1 引 言
滩涂又称为潮间带,位于海陆交接的过渡地带,在高潮位时被海水覆盖、低潮位时显露水面[1]。滩涂面积宽广、地理位置适宜,对于生态环境保护、缓解自然灾害等起着重要作用[2]。因此,对滩涂地形进行监测管理具有重要意义。常用的滩涂地形测量方式有全站仪导线测量[3]、卫星定位测量[4]、航空摄影测量[5]和卫星遥感影像测量[6]等。但是,全站仪和卫星定位测量需要在现场选点和埋设测量桩等,存在施测困难、测量密度较小等缺陷;航空摄影测量和卫星遥感影像测量无法穿透植被获取地面信息,难以得到高精度的滩涂数字高程模型(Digital Elevation Model,DEM)。因此,上述方法在滩涂地形反演方面均受到一定程度地限制。三维激光雷达(Light Detection and Ranging,LiDAR)技术具有高精度、高效率、高密度、无接触等优点,近年来已成为快速获取大范围三维地形信息,生成高精度DEM的首选手段[7-8]。尤其是无人机LiDAR系统,测量范围广、效率高、数据采集灵活、成本较低,且激光具有植被穿透性,在滩涂地形测量中具有独特的优势[9]。滩涂表面生长有不同类型的植被,因此获取滩涂高精度地形数据的首要问题就是对植被点云进行滤波。
针对LiDAR点云数据滤波,许多学者开展了大量研究,提出了一些经典的滤波算法,包括基于坡度滤波[10]、渐进数学形态学滤波[11]和布料模拟滤波[12]等。但是,这些滤波算法大部分是应用于城市、森林等场景,在滩涂这种表面淤陷、多类型茂密植被交替覆盖的特殊区域的应用则相对较少。目前的研究大多采用半自动和手工编辑相结合的方式滤波得到高精度的滩涂地面信息。丁仕军等[13]通过自动滤波与手工调整相结合的方式对东营沿海滩涂点云数据进行处理,可获得高程精度为±0.25 m的DEM。Zhao等[14]采用双线性插值的方法对机载LiDAR点云数据进行处理,以此建立潮滩区域的DEM。张荣华等[15]采用自动和手动交互的方式对宁波市滩涂点云数据进行精细分类,提取出地面点后再通过内插的方式获得高精度DEM。因此,需要对现有滤波算法在滩涂植被滤波方面的适用性进行分析,寻求多类型植被覆盖滩涂的最佳滤波方法,为滩涂点云数据处理和建立滩涂高精度的DEM提供重要技术借鉴。
2 点云滤波算法概述
2.1 基于坡度滤波
基于坡度滤波算法的基本思想是:近邻点之间若存在较大的高差,则更可能是由地物而不是陡峭的地形所引起的,其中高程较高的点属于非地面点;当近邻点高差一定时,若二者水平距离越接近,则高程较高点属于非地面点的概率越大。定义高差阈值函数
其中:s表示坡度;
2.2 渐进数学形态学滤波
渐进数学形态学滤波主要利用数学形态学中的开运算操作,通过先腐蚀后膨胀的操作,可去除较小的目标[16]。该算法首先对原始LiDAR点云进行规则格网化操作,通过比较开运算前后对应格网点的高程差与设定的阈值之间的关系,剔除大于阈值的点。通过线性或指数的方式扩大滤波窗口进行迭代计算,直至滤波窗口达到设定的最大值时结束运算。高差阈值的设定与实验区域的坡度s有关,s的表达式如下:
其中:
其中:
渐进数学形态学滤波以判断开运算前后对应格网点的高差与阈值的关系为基础,可以对滩涂区域的植被进行滤除。但是,当滩涂区域地形存在一定程度的起伏时,可能会将起伏较大的地面点一同滤除。
2.3 布料模拟滤波
布料模拟滤波(Cloth Simulation Filtering,CSF)是一种基于简单物理过程的算法,其基本思想是:将一块虚拟的布料置于地形上方,在重力作用下布料会下降,假定布料十分柔软,那么这块布料将贴附在地物表面,最终布料的形状构成数字表面模型(Digital Surface Model,DSM)。如果事先将地形进行倒置,并且布料具备一定的硬度,则布料最终的形状构成DEM。布料模拟滤波原理如图1所示。
图1
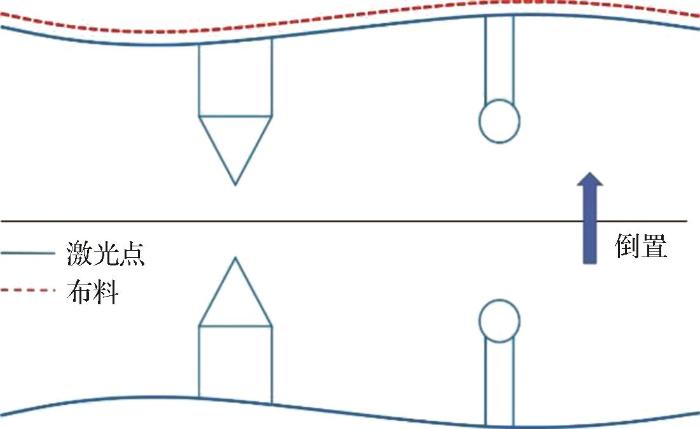
CSF算法的具体实现步骤如下:①通过第三方工具(如cloudcompare等)自动或手动剔除异常值;②将LiDAR点云数据倒置;③设置布料格网,通过设定的格网分辨率确定粒子数量,将其起始位置设定于倒置点云的最高点上方;④将LiDAR点云和布料粒子投影至水平面上,查找各布料粒子的最近邻LiDAR点,将其高程记为IHV;⑤求解每一个可移动状态的粒子在重力作用后的位置,将其高程与IHV相比较,若粒子高程小于或等于IHV,则将该粒子的高程设置为IHV,并设置其为不可移动;⑥计算每个布料粒子在内力作用下的位移;⑦重复步骤⑤~⑥,直到所有粒子的最大高度变化小于指定的阈值或超出设定的最大迭代次数时,结束运算过程;⑧求解布料粒子与对应LiDAR点之间的几何距离;⑨若LiDAR点与布料粒子间的几何距离小于设定的阈值,则将其标记为地面点,否则标记为非地面点。
布料模拟滤波以判断迭代运算结束后的布料粒子与LiDAR点云之间的距离关系为基础,可以较好的区分滩涂区域的地面点与植被点,但是,当滩涂区域存在接近地面且相对密集的植被时,可能无法对其进行精准滤波。
3 实验结果与分析
3.1 研究区域与数据概况
图2
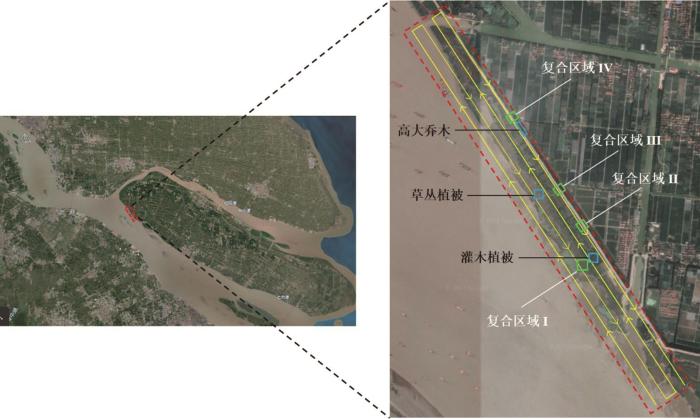
实验数据采用北科天绘公司的蜂鸟Genius 激光雷达系统获取,该系统以ZR-M66无人机作为载体平台。Genius激光雷达系统采用905 nm激光波长,其最大测距可达250 m,凭借360°的扫描视场角和320 kHz/640 kHz的高扫描频率可快速获取高密度的点云数据,同时,该系统采用双回波探测技术,可以较好地穿透滩涂植被,获取高精度的滩涂地面点数据。实验数据采集时间为2020年8月17日,数据采集共分两个航次4条航带完成,如图2黄色线路所示,航线总长23 km,无人机飞行高度为100 m,飞行速度为7 m/s,航带宽度为100 m,飞行总时长60 min。数据外业采集完成后,通过POSPac软件精准解算飞行轨迹,再通过UI-RF点云预处理软件解算得到每一个激光脚点的三维空间坐标,坐标系统设置为CGCS2000,高程系统采用大地高。获取的原始LiDAR点云总数量为66 549 940,点云总体密度为49 pt/m2。
图3
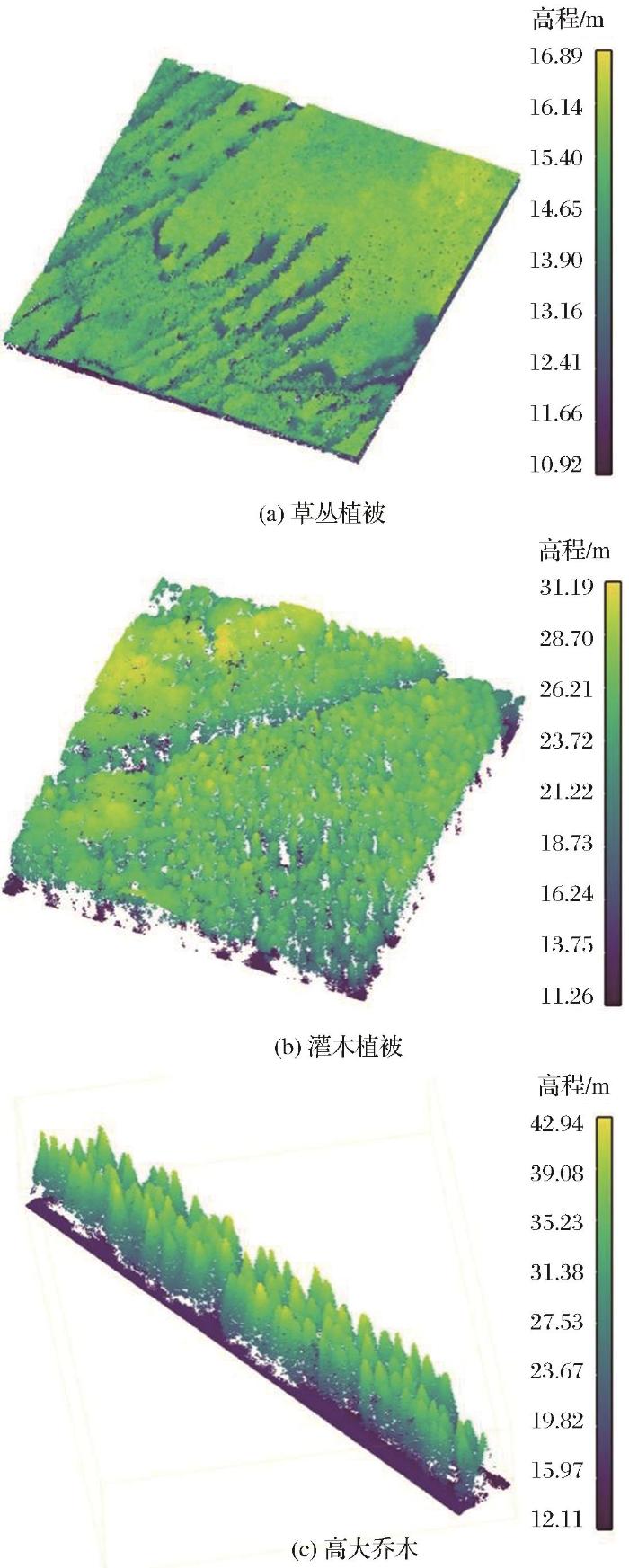
图3
3类典型滩涂植被原始点云数据
Fig.3
The original point cloud data of three typical tidal flat vegetation
表1 实验数据信息
Table 1
| 数据 | 点数量 | 区域范围 | 点云密度/(pt/m2) | 植被类型 | 植被高度/m |
|---|---|---|---|---|---|
| 1 | 643 627 | 110 m × 100 m | 58.51 | 草丛植被 | 3~4 |
| 2 | 576 496 | 100 m × 100 m | 57.65 | 灌木植被 | 12~16 |
| 3 | 205 710 | 160 m × 15 m | 85.71 | 高大乔木 | 22~26 |
实验通过定性和定量两个方面对滤波结果进行评价。定性分析是通过视觉对比滤波前后的差异,检查植被是否被完全滤除,得到的地面数据是否与真实地形相符合。定量分析是采用国际摄影测量与遥感协会提出的误差评判标准:第I类误差(T.I)、第II类误差(T.II)和总误差(T.E.)[18]。第I类误差是指地面点错误分类为非地面点的数量与真实地面点数量的比值,第II类误差是指非地面点错误分类为地面点的数量与真实非地面点数量的比值,总误差是指错误分类的点的数量与总的点数量的比值。除此之外,Kappa系数[19]也被用于实验的定量分析中。Kappa系数常用于表示分类结果的总体一致性,其取值在0~1之间,若该值越大,说明分类精度越高。参考数据通过手动滤波结合研究区域的卫星影像辅助判断得到,以保证数据的准确性。
实验所选取的3种滤波算法中,基于坡度滤波和渐进数学形态学滤波算法采用Matlab程实现,布料模拟滤波采用开源软件cloudcompare实现。在本研究不同类型植被覆盖区域滤波实验中,均通过多次调整滤波算法参数,以总误差最小时作为最优结果进行定性和定量分析。
3.2 滩涂单一植被类型区域滤波结果分析
3.2.1 草丛植被滤波结果
草丛植被区域多为低矮植被,分布密集,图4为其滤波结果图。从图4(a)可以看出坡度滤波可以滤除大部分的草丛植被,因为地形坡度变化较小,大多数地面点可得到保留,但会分布有一定的二类误差,这是因为设定单一的坡度阈值容易将部分与地面较为接近的植被点分类为地面点。从图4(b)可以看出渐进数学形态学滤波同样可以去除大部分的植被,但会分布有一定的一类误差,这是因为部分裸地高于周围地形,且面积较小,在进行开运算时其高差变化大于阈值,从而被误分为非地面点。从图4(c)可看出布料模拟滤波对于草丛植被区域也能取得较好的滤波结果,地面点保留较为完整,一类误差分布较少,但分布有少量的二类误差,主要为靠近地面的植被点被分类为了地面点。图4(d)为图4(a)~图4(c)指定区域(红线)滤波前后的断面图,可以看出3种滤波算法均能有效去除大部分的草丛植被,但相对而言布料模拟滤波保留的地面点更为完整,残余的植被点更少,滤波效果更好。
图4
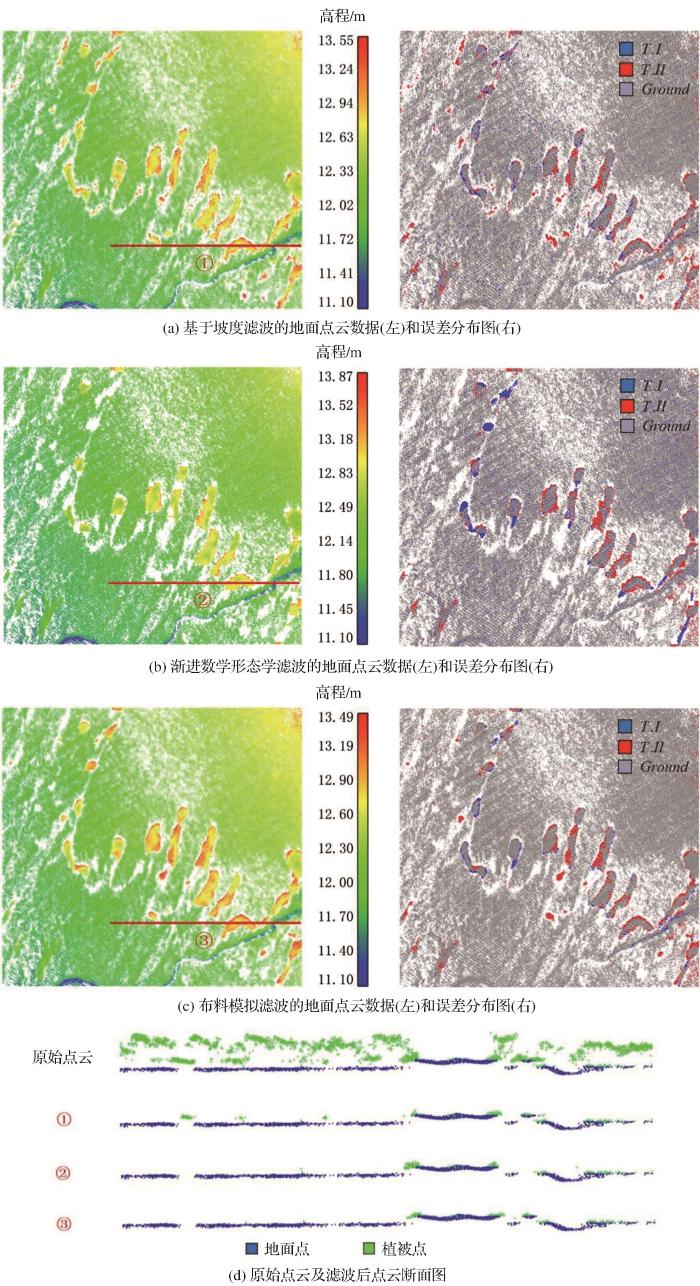
表2为3种滤波算法针对草丛植被区域滤波的精度评价信息,可以看到布料模拟滤波的总误差为1.57%,在3种算法中最低,其Kappa系数为96.74%,在3种算法中最高,说明该算法针对草丛低矮植被能取得更好的效果,产生较少的分类误差。而渐进数学形态学滤波存在较大的一类误差,为6.56%,基于坡度滤波的一类误差和二类误差分别为3.17%和2.54%,滤波精度相对较低。
表2 草丛植被滤波精度评价
Table 2
| 滤波算法 | T.I/% | T.II/% | T.E./% | Kappa |
|---|---|---|---|---|
| 基于坡度滤波 | 3.17 | 2.54 | 2.79 | 0.942 |
| 渐进数学形态学滤波 | 6.56 | 1.83 | 3.72 | 0.922 |
| 布料模拟滤波 | 0.78 | 2.11 | 1.57 | 0.967 |
3.2.2 灌木植被滤波结果
灌木植被相对草丛植被的高度更高,且分布较为密集,图5为其滤波结果图。从图5(a)可看出,坡度滤波整体而言可取得较好效果,能较好地保留原始LiDAR点云中的地面信息,但会存在少量二类误差,部分靠近地面的植被点会被分类为地面点。从图5(b)可以看出渐进数学形态学滤波同样也能将大部分植被点去除,但右上角分布有一处明显的一类误差,这是因为右上角部分区域地形起伏相对较大,在进行开运算时会导致该部分地面点被分类为非地面点。从图5(c)可看出布料模拟滤波对于灌木植被的滤波效果也较好,较少有一类误差出现,二类误差分布亦较少。图5(d)为图5(a)~图5(c)指定区域(红线)滤波前后的断面图,可以看出3种滤波算法均能有效滤除植被点,但存在着细微的差异,坡度滤波会保留部分接近地面的植被,渐进数学形态学滤波会滤除部分地形起伏区域的地面点,而布料模拟滤波能在较好地保留地面点信息的同时有效去除植被点,滤波效果相对更好。
图5
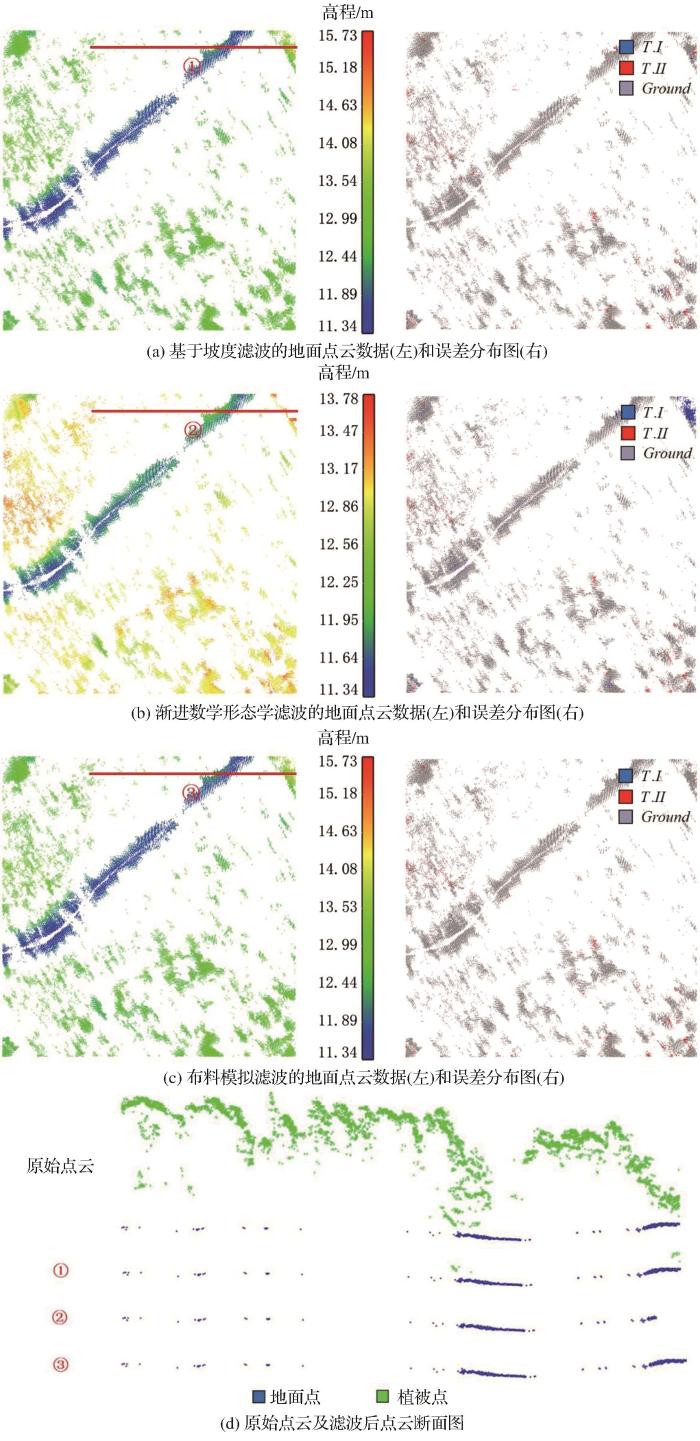
表3为3种滤波算法针对灌木植被区域滤波结果的精度评价信息,3种算法的总误差均低于0.5%,分类误差较低,整体而言均可取得较高的滤波精度。其中基于坡度滤波和布料模拟滤波的Kappa系数均能达到98%以上,滤波结果与真实地形吻合度较高,而渐进数学形态学滤波由于将部分地形起伏区域的地面点分类为非地面点,导致一类误差增大至4.23%,从而影响滤波精度。
表3 灌木植被滤波精度评价
Table 3
| 滤波算法 | T.I/% | T.II/% | T.E./% | Kappa |
|---|---|---|---|---|
| 基于坡度滤波 | 0.44 | 0.19 | 0.21 | 0.983 |
| 渐进数学形态学滤波 | 4.23 | 0.14 | 0.40 | 0.966 |
| 布料模拟滤波 | 0.03 | 0.17 | 0.16 | 0.987 |
3.2.3 高大乔木滤波结果
高大乔木区域的植被相对灌木植被的高度更高,且该区域包含斜坡,图6为其滤波结果图。从图6(a)可看出坡度滤波能有效滤除高大的树木,斜坡地形也得到较好的保留,但在斜坡及地形起伏区域存在少量二类误差,部分靠近地面的植被点因处于坡度阈值范围内而被误分类为地面点。从图6(b)可看出渐进数学形态学滤波的二类误差分布较少,但会分布有零散的一类误差,主要为部分略微起伏的地面点被分类为非地面点。从图6(c)可以看出布料模拟滤波在滤除高大乔木的同时能较好保留地面点信息,一类误差和二类误差的分布均较少,滤波效果较好。图6(d)为图6(a)~图6(c)指定区域(红线)滤波前后的断面图,可以看出3种滤波算法均能对高大乔木进行有效去除,其中,布料模拟滤波保留的植被点相对更少,滤波效果更好。
图6
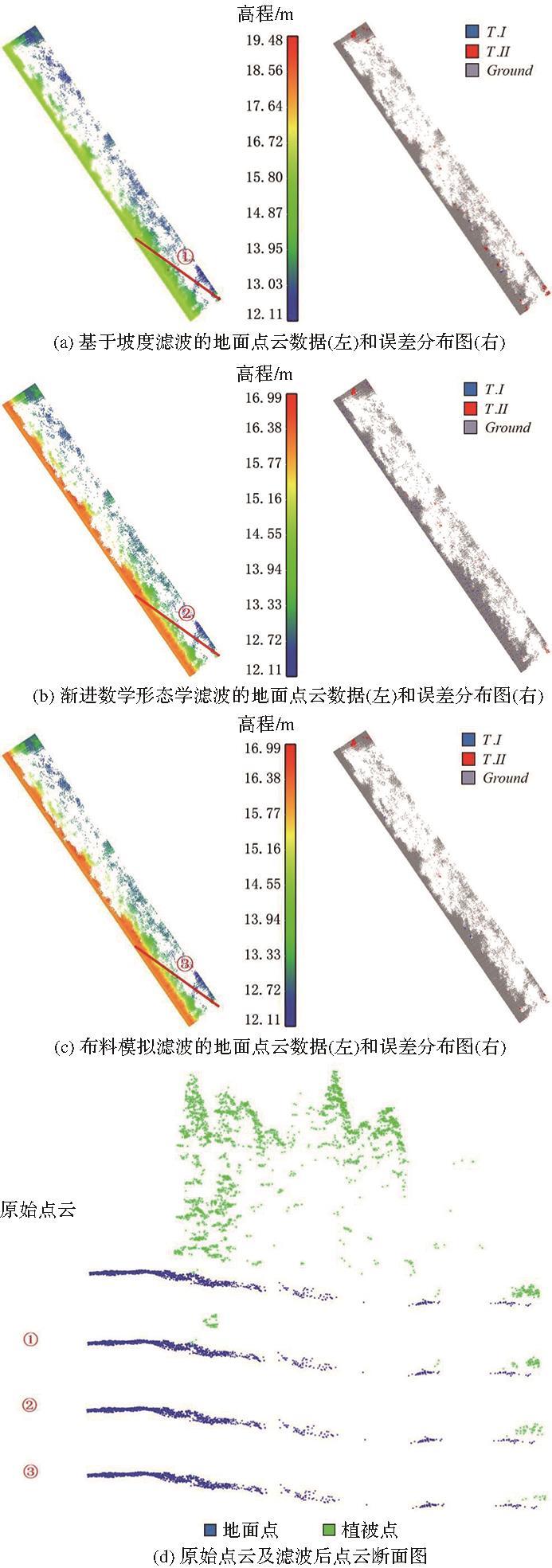
表4为3种滤波算法针对高大乔木区域滤波结果的精度评价信息,3种算法均能取得较高的分类精度,其中布料模拟滤波结果的Kappa系数为99.30%,为3种滤波算法中最高,总误差为0.23%,为3种滤波算法中最低,说明其滤波效果更好,与真实地面吻合度最高。基于坡度滤波和渐进数学形态学滤波的精度也较高,Kappa系数分别为98.54%和97.77%,但渐进数学形态学滤波容易将部分地形起伏区域的地面点分类为非地面点,一类误差为2.60%,相对其他两种滤波算法误差更大。
表4 高大乔木滤波精度评价
Table 4
| 滤波算法 | T.I/% | T.II/% | T.E./% | Kappa |
|---|---|---|---|---|
| 基于坡度滤波 | 0.27 | 0.55 | 0.49 | 0.985 |
| 渐进数学形态学滤波 | 2.60 | 0.24 | 0.74 | 0.978 |
| 布料模拟滤波 | 0.09 | 0.27 | 0.23 | 0.993 |
综上,在3个典型滩涂植被覆盖类型区域的实验中,布料模拟滤波的总误差分别为1.57%、0.16%和0.23%,Kappa系数分别为96.74%、98.70%和99.30%,相较于其他两种滤波算法精度更高,说明布料模拟滤波对于滩涂区域的滤波效果相较于另两种滤波算法更好,通用性更强,更适用于多类型植被覆盖滩涂区域的植被滤波。
3.3 滩涂复合植被类型区域滤波结果分析
通过3.2节滤波实验得出布料模拟滤波更适用于多类型植被覆盖滩涂区域的植被滤波,为了进一步验证布料模拟滤波算法在滩涂区域的通用性,这里选取了研究区域中的另外4个典型局部区域进行定性和定量分析,这4个区域均为两种及以上植被类型的复合区域,具体数据信息如表5所示。
表5 所选区域点云数据信息
Table 5
| 区域 | 点云数量 | 区域范围 | 点云密度 | 区域植被类型 |
|---|---|---|---|---|
| Ⅰ | 542 016 | 105 m × 95 m | 54.33 pt/m2 | 草丛植被、灌木植被 |
| Ⅱ | 530 913 | 100 m × 95 m | 55.88 pt/m2 | 灌木植被、高大乔木 |
| Ⅲ | 267 908 | 75 m × 60 m | 59.54 pt/m2 | 草丛植被、高大乔木 |
| Ⅳ | 550 881 | 90 m × 65 m | 94.17 pt/m2 | 草丛植被、灌木植被、高大乔木 |
图7为区域Ⅰ~Ⅳ在布料模拟滤波前后的点云数据对比图。整体而言,4个区域均能取得较好的滤波效果,当面对多种植被类型组合的滩涂区域时,布料模拟滤波能将多种类型的植被同时有效地滤除,地面信息也能完整地保留,主要的特征地形如斜坡、道路等在滤波后的点云数据中也清晰可见,能清晰看出潮沟的走向分布。说明布料模拟滤波在滩涂区域的滤波效果较好,通用性较强。
图7
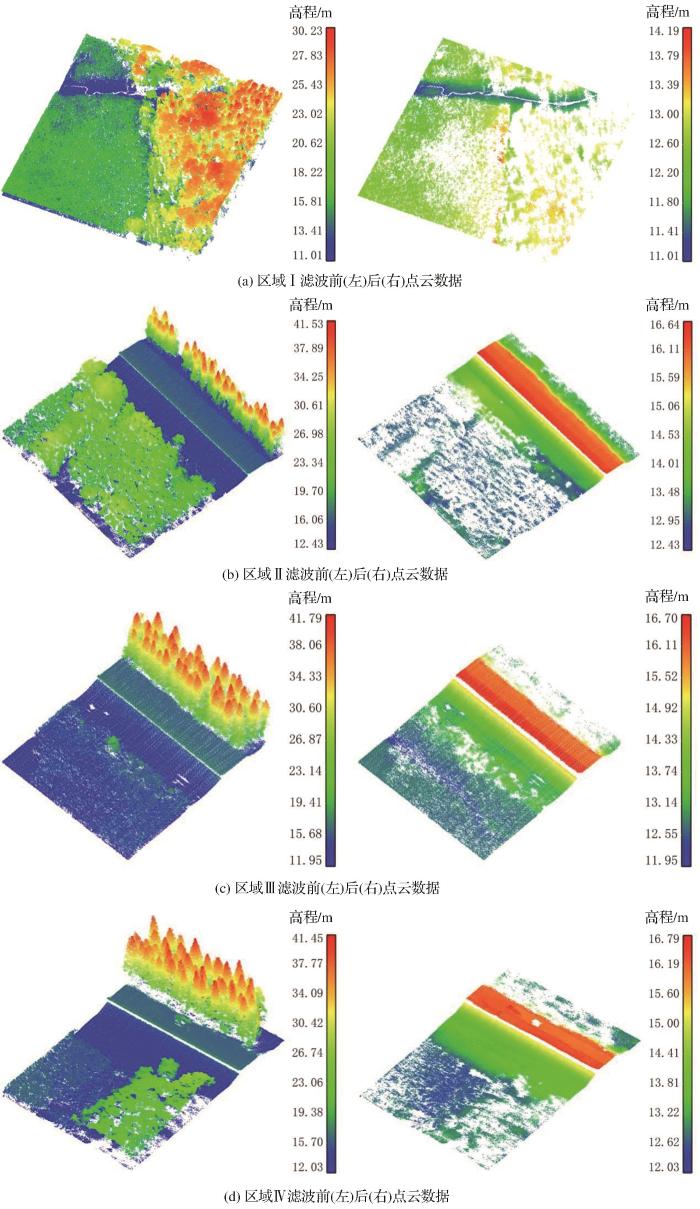
4个典型区域的定量评价结果如表6所示,可以看出4个区域的Kappa系数均达到97%以上,区域Ⅰ、Ⅱ和Ⅳ的分类误差均低于1%,区域Ⅲ的分类误差为1.28%,仅存在较少的分类误差,说明布料模拟滤波对于崇明西滩不同类型植被区域均能达到较高的分类精度。
表6 崇明西滩典型区域滤波精度评价
Table 6
| 区域 | T.I/% | T.II/% | T.E./% | Kappa |
|---|---|---|---|---|
| Ⅰ | 0.92 | 0.58 | 0.65 | 0.979 |
| Ⅱ | 1.62 | 0.45 | 0.93 | 0.981 |
| Ⅲ | 1.52 | 1.00 | 1.28 | 0.974 |
| Ⅳ | 0.80 | 0.67 | 0.74 | 0.985 |
3.4 研究区域滤波与DEM生成
通过3.2节和3.3节的实验分析可得出布料模拟滤波对滩涂区域的滤波效果更佳,具有较强的通用性,因此本文采用布料模拟滤波对整个研究区域的原始LiDAR点云数据进行处理,滤波前后的点云数据如图8所示。可以看出布料模拟滤波可以较好地去除滩涂区域各种类型的植被,同时在滤波后的点云数据中可以清晰地看到潮沟等地物的分布情况,能够较好地保留地面信息。
图8
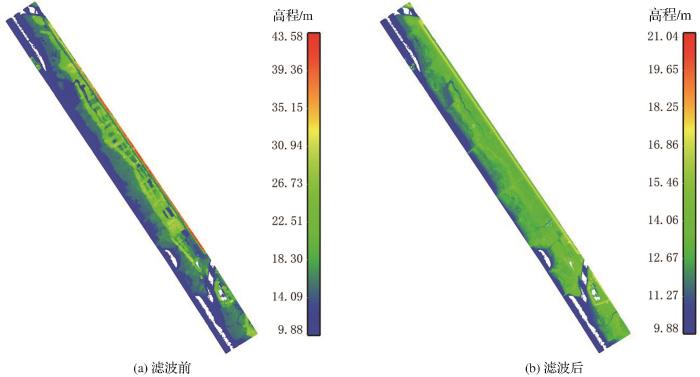
图8
崇明西滩滤波前后点云数据
Fig.8
Point cloud data before and after filtering in Western Chongming Island
点云滤波处理完成后,对地面点进行插值运算即可生成滩涂区域的DEM。实验主要采用克里金插值(Kriging)算法对布料模拟滤波后的地面点数据进行内插处理,设置DEM的格网间距为0.5 m。由于平静的海水面可以看作是镜面,当入射角较小时,虽然大部分激光被水吸收,但是仍有部分返回被接收,导致无人机正下方小范围内会有水面点云数据,这里采用手动方式剔除,处理后得到研究区域的DEM如图9所示。
图9
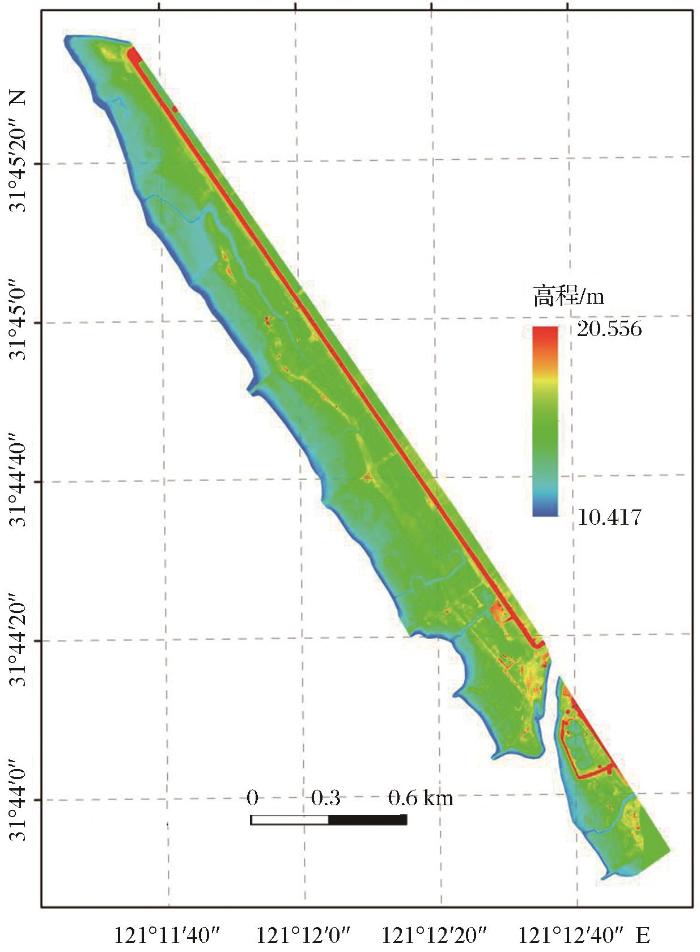
从图9中可以清晰地看到滩涂表面高程变化及潮沟的走向和空间分布情况等。总体而言,滩涂表面高程由海向陆呈逐步增加的趋势,高程变化较为平缓,高程最低处为靠海的地带,为10.417 m,最高处为滩涂上部的道路区域,为20.556 m,滩面高程多集中于12 ~ 16 m之间,较少有起伏较大的区域。通过滩涂DEM还可清晰看出潮沟的分布情况,该区域的潮沟类型主要为滩面水流冲刷型,发源于大潮高潮线附近,经过潮滩的上部和中部,在潮滩的中下部呈现为浅的喇叭状沟口,随后消失。其总体流向大致与岸线垂直,或与潮滩的倾斜方向一致,呈现为树枝状,其主干主要分布于潮滩的中下部区域。
4 结 论
目前点云滤波算法的研究应用主要集中于城市、森林、山地等场景,对于滩涂这种表面淤陷、植被类型丰富且交替分布的特殊区域的应用还相对较少。本实验主要分析现有滤波算法在滩涂植被滤波方面的适用性,以寻求多类型植被覆盖滩涂的最佳滤波方法。以上海市崇明西滩某一淤泥质滩涂作为研究区域,从其中选取草丛植被、灌木植被和高大乔木这3类典型滩涂植被覆盖类型区域展开滤波实验,通过基于坡度滤波、渐进数学形态学滤波和布料模拟滤波这3类经典点云滤波算法分别进行实验,实验结果表明:布料模拟滤波在多类型植被覆盖滩涂区域不仅滤波精度高,而且通用性较强,是构建滩涂高精度DEM的首选滤波方法。但由于滩涂区域植被覆盖密度大,仅有少量的激光脉冲可穿透至地面,部分区域表现为空白,后续可研究不同插值算法对结果精度的影响,进一步提高DEM产品的精度。
参考文献
Response of tidal bank on the Changjiang River Mouth Foreland to drastic decline in riverine sediment supply and sea level rise
[J].
长江口前沿潮滩对来沙锐减和海面上升的响应
[J].
Advances in development, utilization, and protection of coastal tidal flats
[J].
海岸带滩涂资源的开发利用与保护研究进展
[J].
The seabeach-surveying at coastal region outside the mouth of Oujiang River
[J].
瓯江口外滨海区的滩涂测量
[J].
Morphological changes at vellar estuary, india-impact of the december 2004 tsunami
[J].
A pilot study on the application of a UAV aerial photography system in the tidal flat elevation
[J].
无人机航摄系统在滩涂高程测量中的应用研究
[J].
Topographic mapping on large-scale tidal flats with an iterative approach on the waterline method
[J].
Application of Airborne LiDAR technology in topographic survey of tidal flat and coastal zone
[J].
激光雷达在滩涂海岸地形测量中的应用
[J].
Detection of seasonal changes in vegetation and morphology on coastal salt marshes using terrestrial laser scanning
[J].
Tidal creek mapping from airborne LiDAR data using multi-resolution cloth simulation filtering
[J].
A Progressive morphological filter for removing nonground measurements from airborne LiDAR data
[J].
An easy-to-use Airborne LiDAR data filtering method based on cloth simulation
[J].
Application of airborne LiDAR in the measurement of tidal flat in Dongying
[J].
机载LiDAR在东营沿海滩涂测量中的应用
[J].
Morphological characteristics of tidal creeks in the central coastal region of Jiangsu, China, using LiDAR
[J].
Key technology research of intertidal zone survey based on airborne LiDAR
[J].
基于机载激光雷达的滩涂测绘关键技术研究
[J].
LiDAR principles, processing and applications in forest ecology
[M].
Soil enzyme activities in Chongming Xitan Wetlands dominated with phragmites australis
[J].
崇明西滩芦苇湿地土壤酶活性特征的研究
[J].
Experimental comparison of filter algorithms for bare-earth extraction from airborne laser scanning point clouds
[J].
A coefficient of agreement for nominal scales
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}