




1 引 言
森林调查对于了解森林生态系统,评估森林资源储量以及监测森林变化等方面具有非常重要的作用[1]。森林结构参数是森林调查中重要的参数,提高森林结构参数反演精度,对于及时获取准确森林资源信息具有重要意义[2]。激光雷达(Light Detection And Ranging, LiDAR)系统[3]作为一种主动遥感技术的出现,在现代化森林结构参数提取方法的发展中发挥了关键作用。激光雷达通过测量扫描设备与目标之间的距离,快速获取物体表面高密度三维点云数据用于描绘物体三维结构,能够为描述森林结构提供精确数据[4-6]。背包激光扫描(Backpack Laser Scanning,BLS)在林业上的应用[7-9],不仅极大地提高了数据采集的机动性与效率,更为复杂林区数据采集开辟了新的可能性[10]。背包激光扫描能够获得更加完整的林地点云数据,对森林结构参数提取具有重要意义。
由于受到测量范围的限制、林下枝叶的遮挡以及周围太阳辐射的影响,背包激光扫描测量距离越远采集到的点云密度越低,因此限制了树高的测量精度。对于背包激光扫描的研究主要是提取胸径参数。Liang等[8]较早开展背包激光扫描提取胸径,利用圆柱体拟合进行胸径提取,提取精度RMSE与相对精度分别为5.06 cm和85.37%。Hyyppa等[11]使用最小二乘圆拟合方法对6种移动激光扫描设备点云数据进行胸径提取,并对多种移动激光设备点云数据胸径提取精度对比评估,在林下灌木覆盖度较高的样地条件下,背包激光扫描点云胸径提取精度RMSE与相对精度分别为2.2 cm和92.3%。Oveland等[12]使用一帧背包激光扫描点云数据,采用圆拟合方法进行胸径提取,胸径提取精度RMSE与相对精度分别为1.5 cm和92.5%。Chen等[13]对3种激光扫描设备点云胸径提取精度对比评估,通过将树干点云拟合成0.4 m高度的多边形柱体并计算多边形圆柱体体积提取胸径,胸径提取精度RMSE与相对精度分别为1.58 cm和88.22%。上述方法均直接将胸径提取算法作用于胸径点云,而对胸径提取前的点云处理研究却鲜有涉及。由于背包激光扫描在移动中直接测量森林的三维结构,点云数据通常从多个不同位置采集并且实时进行点云拼接。为准确拼接不同位置采集的点云数据,需要精确的扫描位置与方向。背包激光扫描建立在同步定位与制图(Simulataneous Localization And Mapping,SLAM)技术上,在实际应用中,SLAM技术中的传感器误差、算法性能、传感器融合等问题都会对背包激光扫描定位精度产生影响,造成背包激光扫描传感器采集的点云精度良莠不齐,并且不同位置采集的点云数据拼接时存在误差,从而引发集群重叠效应使得背包激光扫描点云数据中含有大量离散点[14-16],不佳的数据质量导致背包激光扫描胸径提取精度不甚理想。与地面激光扫描(Terrestrial laser scanning,TLS)数据采集设备相比,背包点云数据质量比较低,胸径提取精度与地面激光扫描胸径提取精度存在差距。为了提高背包激光点云胸径提取精度,对点云数据进行前期处理就显得尤为重要。点云强度作为点云数据的组成部分,能够反映数据获取过程中由于采集距离[17]、入射角度[18]、目标材质[19]等问题对点云质量采集状况。目前,点云强度已经应用于目标提取[20-21]、地物分类[22-23]等方面,点云强度在分离不同质量点云方面具有重要的研究价值。因此,实验针对点云强度对点云数据进行处理,以期能够提高胸径提取精度。
综上所述,为提高背包点云数据胸径提取精度,本研究利用最小二乘[24]胸径拟合方法,以背包激光扫描点云为研究数据。通过构造不同厚度的胸径切片,分别对胸径切片根据点云强度划分点云强度区间,对不同强度区间的点云切片进行胸径提取,提取结果与实测胸径结果进行评估,以期获得最佳的点云强度区间。通过与未进行点云强度区间划分的完整点云胸径提取结果进行对比,从而实现提高背包激光扫描点云胸径提取精度的目的。
2 研究区和数据
2.1 研究区概况
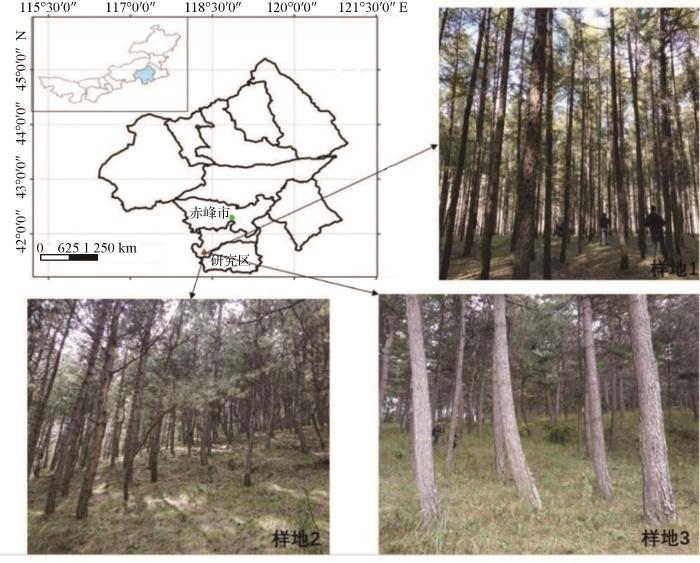
内蒙古自治区旺业甸林场(118°09′~118°30′ E,41°21′~41°39′ N)位于内蒙古自治区赤峰市喀喇沁旗,如图1所示。地势西南高东北低,处于大兴安岭与燕山山脉交界地带,是茅荆达坝次生林区的重要组成部分,林场总面积约为2.5×104 hm2,总森林蓄积量约为1.5×106 m3。海拔在800~1 890 m范围内,年均气温4.2 ℃,年均最高气温36 ℃,年均最低气温-31 ℃。土壤类型主要以草甸草原土、棕色森林土、棕壤型粗骨土或者石质土为主。年均降水量为400~600 mm,且降水集中于6~9月,属于温带半干旱大陆季风型气候。研究区主要树种为落叶松(Larix gmelini)、油松(Pinus tabulaeformis)、蒙古栎(Quercusmongolica)、白桦(Betula platyphylla)、山杨(Populus davidiana)等。
图1
2.2 实测数据
表1 样地实测数据
Table 1
| 样地 | 树种 | 坡度/° | 胸径/cm | ||
|---|---|---|---|---|---|
| 最小值 | 最大值 | 平均值 | |||
| 1 | 落叶松 | 8 | 7.5 | 22.1 | 15.7 |
| 2 | 油松 | 15 | 8.3 | 26.1 | 13.8 |
| 3 | 油松 | 13 | 10.7 | 43 | 31.2 |
2.3 BLS点云数据
表2 背包式激光扫描仪技术参数
Table 2
| 参数 | 数值 |
|---|---|
| 距离精度/cm | ±3 |
| 角度分辨率/′ | 10 |
| 波长/nm | 903 |
| 水平视场角/° | 0~360 |
| 垂直视场角/° | -90~90 |
| 扫描距离/m | 100 |
| 扫描速率/point·s-1 | 600 000 |
图2
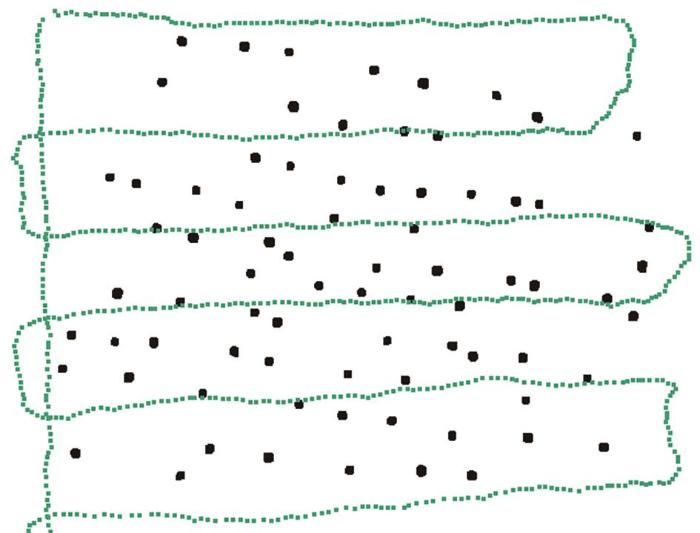
图2
样地单木位置和数据采集路线
Fig.2
Location of individual tree and route of data collection
3 研究方法
本文研究点云强度对胸径提取精度的影响。在不同点云切片厚度条件下,基于点云强度对胸径切片点云划分强度区间,研究不同切片厚度下,不同点云强度对参数提取精度的影响,从而确定最佳点云强度区间,利用最佳点云强度区间点云进行胸径提取,提高背包激光点云胸径提取精度。研究方法流程如图3所示。
图3
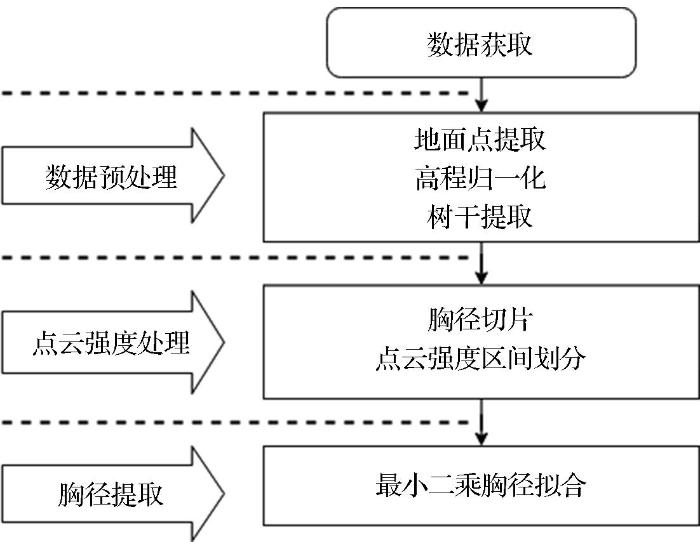
3.1 数据预处理
通常截取树干距离地面1.3 m处点云切片进行胸径提取,胸径提取时主要考虑两个因素。
3.1.1 高程归一化
由于研究区位于山地,本研究通过地面分类算法[25]提取地面点进行高程归一化,以此达到消除地形影响的目的。高程归一化结果为所有地面点三维坐标的Z值均趋近于0,对所有样地点云的Z值与近邻地面Z均值做差,从而实现在同一高度进行胸径切片,高程归一化公式见
图4
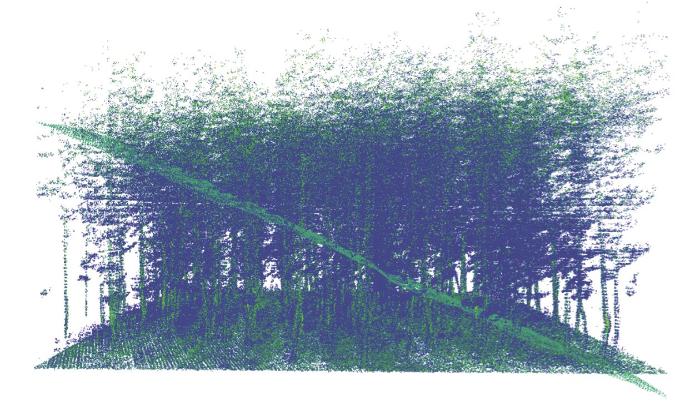
图4
高程归一化结果(蓝色)与地面点(绿色)
Fig.4
Point cloud of normalization(blue)and extracted ground(green)
3.1.2 树干提取
胸径提取只需树干1.3 m高度处的点云切片,本研究基于RANSAC(Random Sample Consensus)[27]对树干进行圆柱拟合。由于地面与林木枝叶点云能够对拟合圆柱造成影响,本研究仅截取高程归一化后Z坐标介于0.5~3 m之间点云用于提取树干。该方法能够从一组观测数据中,通过多次迭代方式滤除“局外点”,进而估计圆柱模型的参数,拟合圆柱模型如
其中:(x0,y0,z0)为圆柱轴线L上一点;(l,m,n)为圆柱轴线L方向向量;r为圆柱半径;此七参数可以确定唯一圆柱方程,(x,y,z)为点云的三维坐标。图5展示了本研究树干提取结果。
图5
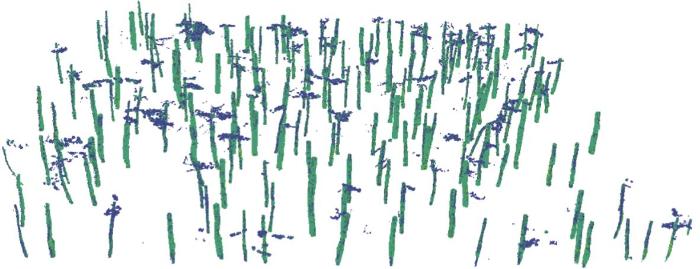
图5
样地0.5 m~3 m切片(蓝色)和提取树干点(绿色)
Fig.5
Slicing points between 0.5m and 3m (blue) and extracted stem points (green) in plot
3.2 点云强度区间划分
胸径提取采用二维平面最小二乘进行圆拟合,将距离地面1.3 m处胸径切片点云作为处理数据,由于不同胸径切片厚度对胸径提取精度的影响,基于Shruthi等[28]的研究方法,采用3种厚度的切片进行研究,通过Cloudcompare软件,截取厚度分别0.2 m、0.4 m和0.6 m点云切片进行胸径提取。
3块样地点云强度分布频率如图6所示,样地1点云强度区间为[0,166],强度均值为36.74 w·m-2;样地2点云强度区间为[0,141],强度均值为29.35 w·m-2;样地3点云强度区间为[0,159],强度均值为30.68 w·m-2。由于样地2与样地3点云强度大于60 w·m-2的点云数量过少而无法实现最小二乘圆拟合,故将3块样地该部分点云进行剔除。
图6
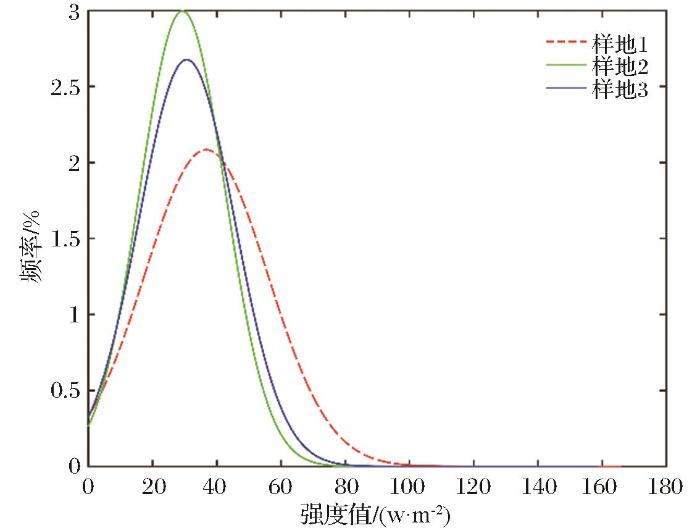
为更好描述不同点云强度对胸径提取精度的影响,实验将切片点云数据以间隔5 w·m-2划分不同强度区间,不同强度区间内的切片点云均进行胸径提取,研究点云强度对胸径提取精度的影响。
3.3 胸径提取
实验采用最小二乘圆拟合算法[29]提取样地林木胸径,该算法是一种拟合二维数据中圆形图案的快速方法,算法通过
其中:(a,b)为圆心坐标;R为圆的半径;di为样本点(xi,yi)与拟合圆间的距离,其计算方法如
3.4 精度评价
依据背包激光扫描点云提取的胸径结果与样地实测胸径结果进行对比,以评估胸径提取精度。胸径提取精度由均方根误差(Root Mean Square Error,RMSE)、平均绝对误差(Mean Absolute Error,MAE)、相对精度和决定系数R2(见式(9)~
其中:
4 结果与分析
4.1 最佳强度区间
利用3种切片点云厚度,通过对点云强度进行划分区间,经过最小二乘胸径拟合所得胸径与实测胸径之间的相对精度如图7所示。对于3块样地,强度区间为[5,10]的点云切片胸径提取结果相对精度最高,此区间即为最佳强度区间。在点云强度区间为[0,5]和[5,10]这两个区间时,3块样地相对精度均表现为上升趋势。强度区间[10,15]之后的区间,相对精度整体表现为下降趋势。在下降过程中,3块样地胸径提取均呈现一定的相对精度反弹,但反弹高点明显低于最佳区间。对于不同的切片厚度,0.6 m厚度切片整体表现最好,0.4 m切片次之。
图7
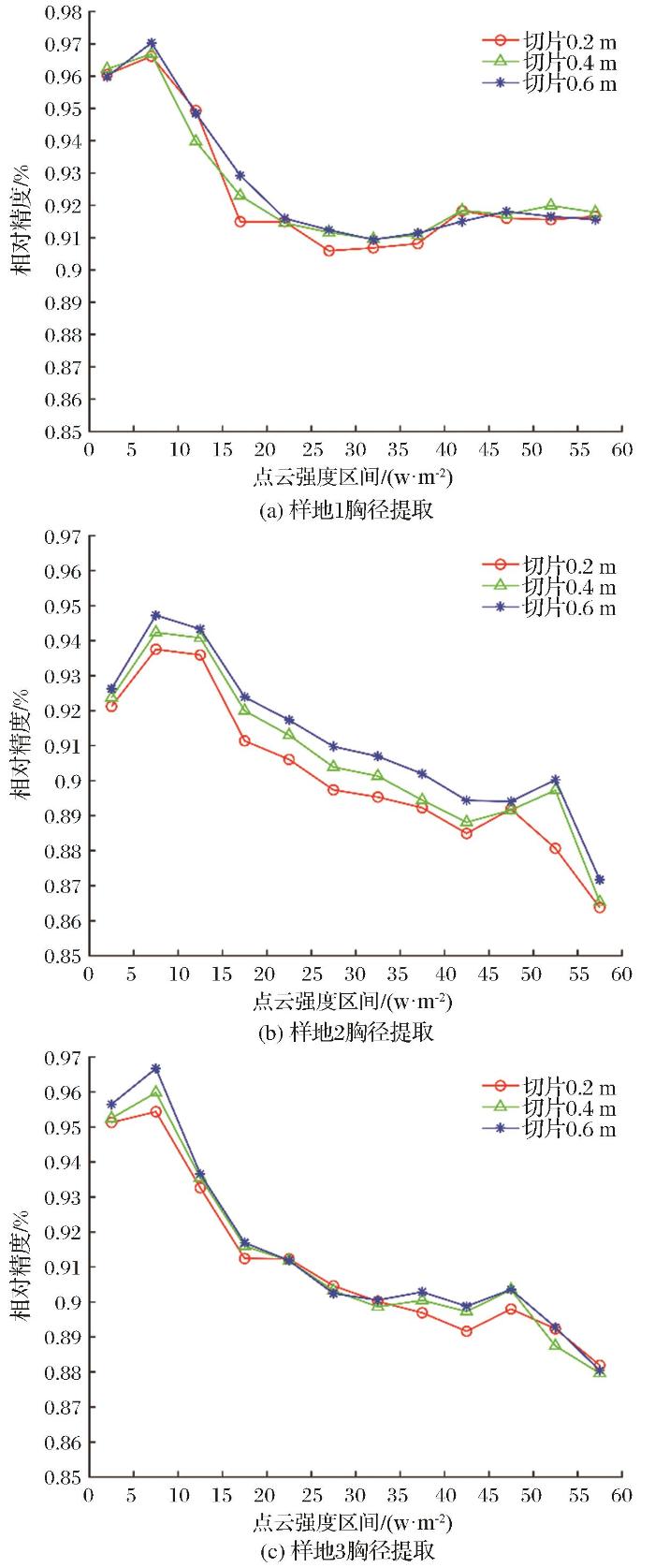
根据相对精度结果可知,胸径提取精度与点云强度有关,随着点云强度逐渐增大,相对精度呈现先增大后减小的趋势。在不同切片厚度条件下,利用强度区间为[5,10]的点云进行胸径提取,均能获得最高的相对精度。由图7可知,在不同树种、不同坡度和不同胸径大小条件下,点云强度都会对胸径提取的相对精度产生影响,点云强度对胸径提取精度的影响具有普遍性。强度区间为[5,10]的点云胸径提取精度最高,说明该区间内的点云精度最高。通过对点云强度进行区间划分并根据区间点云进行胸径提取,能够实现基于点云强度的背包点云滤波将离散点去除,从而实现提高胸径提取精度的目的。
4.2 两类点云胸径提取结果对比
根据3块样地胸径提取相对精度结果,获得最佳点云强度区间[5,10]。此最佳区间内的点云与未经强度区间划分的完整点云胸径提取结果如表3所示。对于同一样地,通过对两类处理点云进行胸径提取,相同切片厚度下,强度区间为[5,10]的点云数据所得结果RMSE和MAE均小于完整点云胸径提取结果,相对精度均显著大于完整点云对应结果。胸径提取精度与切片厚度有关,3块样地在两类点云条件下,随着切片点云厚度的增加,胸径提取结果RMSE与MAE均逐渐降低,相对精度均逐渐增加,对于3种切片厚度,0.6 m切片胸径提取结果最好。
表3 不同切片厚度胸径提取结果
Table 3
| 切片/m | 点云类别 | 样地1 | 样地2 | 样地3 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| RMSE/cm | MAE/cm | 相对精度/% | RMSE/cm | MAE/cm | 相对精度 /% | RMSE/cm | MAE/cm | 相对精度 /% | ||
| 0.2 | 完整点云 | 1.36 | 1.22 | 91.29 | 1.30 | 1.12 | 91.79 | 2.73 | 2.45 | 91.31 |
| [5,10]点云 | 0.53 | 0.49 | 96.61 | 0.99 | 0.78 | 93.75 | 1.42 | 1.08 | 95.47 | |
| 0.4 | 完整点云 | 1.34 | 1.20 | 91.41 | 1.19 | 1.02 | 92.49 | 2.70 | 2.41 | 91.41 |
| [5,10]点云 | 0.52 | 0.43 | 96.68 | 0.91 | 0.72 | 94.23 | 1.25 | 1.02 | 96.02 | |
| 0.6 | 完整点云 | 1.33 | 1.19 | 91.46 | 1.12 | 0.97 | 92.92 | 2.69 | 2.38 | 91.43 |
| [5,10]点云 | 0.46 | 0.37 | 97.03 | 0.83 | 0.66 | 94.73 | 1.03 | 0.81 | 96.73 | |
3块样地均使用强度区间为[5,10]的点云进行胸径提取,所得结果相比于使用完整点云,胸径提取结果RMSE与MAE均有不同程度的降低,相对精度均呈现明显提高,说明胸径提取精度与点云强度有关。但是不同样地胸径提取精度RMSE与MAE降低程度不同,相对精度提高程度也不同,根据表3可知,样地1胸径提取结果RMSE与MAE降低程度和相对精度提高程度最明显,样地3次之。3块样地林地情况存在差异,胸径提取精度改变程度也存在差异。
背包激光扫描点云胸径提取精度与切片厚度有关。在两类点云条件下,实验选取的3种点云切片厚度的胸径提取结果中,精度评价参数RMSE与[2]RAM均随着点云切片厚度的增加而降低,相对精度均随点云切片厚度的增加有一定的提高。点云切片越厚,则离散点所占比例越低,对胸径提取精度的影响也越低。
图8
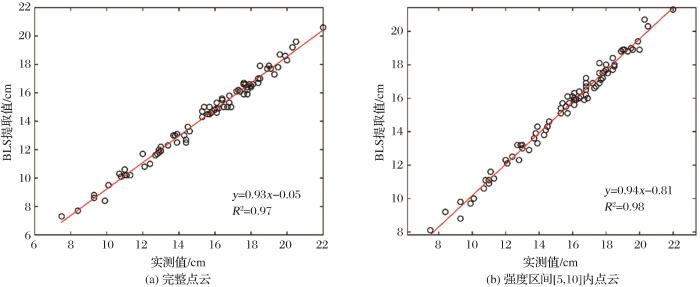
图8
样地1胸径提取结果与实测结果对比散点图
Fig.8
Scatter plot for BLS estimated versus field measured DBH in plot 1
图9
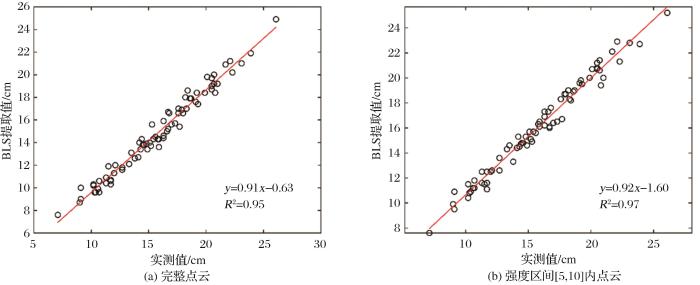
图9
样地2胸径提取结果与实测结果对比散点图
Fig.9
Scatter plot for BLS estimated versus field measured DBH in plot 2
图10
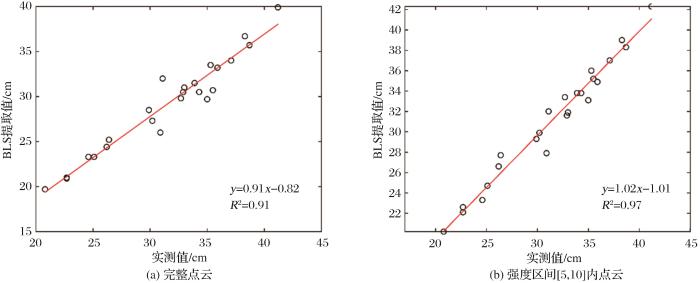
图10
样地3胸径提取结果与实测结果对比散点图
Fig.10
Scatter plot for BLS estimated versus field measured DBH in plot 3
4.3 胸径处理效率
表4 处理所用数量与用时统计
Table 4
由表4数据可知,在切片厚度0.6 m条件下,样地1点云强度区间[5,10]内的点云数量相比于完整点云数量降低了97.63%,所用平均用时降低了98.5%。同等情况下,样地2所用点云数量降低了97.25%,平均用时降低了97.6%;样地3所用点云数量降低了97.83%,平均用时降低了96.36%。结果表明,在0.6 m切片厚度下,利用最佳强度区间[5,10]内的点云数据能够极大的提高胸径提取的效率。
5 讨 论
背包激光扫描点云数据质量与传感器有关。数据采集过程中,传感器采集的高质量点与低质量点在整块样地点云进行拼接时会使点云数据冗余离散。由于低质量点云能够影响胸径提取精度,需要被作为离散点进行滤波处理。实验针对点云强度进行强度区间划分,依靠点云强度对离散点进行滤波处理,所得胸径提取结果均优于相对应的完整点云的胸径提取精度。结果表明,利用最佳强度区间内点云能够提高胸径提取精度。
实验样地树种均为针叶林,由于落叶松与油松表皮皲裂翘曲,发射的激光在树干位置由于表皮翘曲无法获得最大的反射效果,使得接收的胸径位置的点云其强度值由于入射角度的问题,造成采集到的点云强度值整体较小,从而点云强度主要在[5,10]区间。因此通过对不同强度区间的点云进行胸径提取精度对比,得到强度区间为[5,10]时胸径提取精度最好,点云质量最佳。
背包激光点云胸径切片厚度能够对胸径提取精度产生影响。胸径切片点云数据中,低质量点所占比例较小,但仍对提取高精度胸径产生影响。通过对3种切片厚度胸径提取精度分析得到,对于不同厚度的胸径切片,点云切片厚度越小,其投影到二维平面时高质量点云受低质量点的影响越大,胸径提取结果也越差。反之,点云切片厚度越大,胸径切片中的高质量点所占比例增加,使得胸径结果更趋近于真实值,从而切片厚度越大胸径提取精度越高。
树种能够影响点云胸径提取精度。落叶松存在表皮开裂翘曲现象,点云数据内存在一些因翘曲表皮引发的离散点而对胸径提取精度造成影响。相比于落叶松,油松表皮相对光滑,胸径切片点云数据中离散点所占比例明显低于落叶松。完整点云条件下,胸径提取结果RMSE、MAE与相对精度均优于落叶松胸径提取结果。在强度区间[5,10]点云条件下,胸径切片通过点云强度划分区间,能够对该区间内的离散点进行去除,对于3种切片厚度下的胸径提取结果,样地1胸径提取精度均高于样地2提取精度。结果表明,样地树种对点云强度有一定的影响。样地树种表皮越光滑,胸径切片中的离散点越少,所得胸径提取精度越高。通过对点云强度区间划分,选取最佳点云强度区间对提高胸径提取精度具有很大优势,点云强度区间划分更适用于表皮开裂翘曲树种胸径的提取。
样地坡度对胸径提取精度产生影响。在激光扫描覆盖区域内地形高程差异较大的情况下,操作人员背负设备上下坡作业时存在高程变化较快的状况,由于SLAM的定位精度存在问题,会导致进行高程解算时存在误差,使得获取的点云精度较差。样地坡度越大时高程变化越快,导致获取的扫描点云存在更大误差,对精度影响也越大。
胸径提取精度与样地林木胸径大小有关。在平均胸径较大的样地内,数据采集时所产生的离散点较多,对胸径提取精度的影响也越大。在完整点云条件下,平均胸径较大的样地胸径提取精度相比于平均胸径较小的样地低。通过选用强度区间为[5,10]的点云进行胸径提取,基于点云强度对离散点进行去除,尽量减小离散点对胸径提取的影响。平均胸径越大,其对离散点去除的效果越明显,点云质量提高越显著,所以能够更有效地提高胸径提取精度。
此外,操作人员背负设备会导致设备离地面的高度增加,在林地数据采集过程时,设备可能会因碰到树枝产生剧烈晃动从而影响点云精度。人员在行进过程中需要对前方障碍物进行左右避让,以及水平方向的左右转弯等,这都可能造成背包激光扫描设备姿态抖动过大影响定位精度从而影响胸径提取精度。
Oveland等[13]使用背包点云数据进行胸径提取,所以此处仅结合该研究的胸径提取精度RMSE与相对精度与本研究做对比分析。在Oveland等的研究中样地类型为油松和云杉林木,其中油松数量为12株,云杉数量为6株,平均胸径为19 cm,采用圆拟合方法进行胸径提取,胸径提取精度RMSE与相对精度分别为1.5 cm和92.5%。实验中样地2的平均胸径与Oveland等研究中样地的平均胸径相近,对比表3中样地2胸径提取结果,在完整点云下,3种切片胸径提取结果RMSE与相对精度均与Oveland等研究结果相近,说明完整点云条件下与Oveland等研究中提取结果相似。但本研究强度区间在[5,10]的点云胸径提取精度RMSE与相对精度均明显优于Oveland等的研究结果,说明本研究根据点云强度划分区间,使用最佳区间内的点云能够显著提高胸径提取精度。
6 结 论
实验针对点云强度进行研究,相比于对完整点云切片进行胸径提取,使用基于点云强度优化后的点云切片进行胸径提取,提取精度显著提高。现得结论如下:
(1)背包激光扫描点云胸径提取精度与点云强度有关。不同的点云强度区间胸径提取精度不同,基于点云强度对完整点云进行处理,能够实现胸径切片离散点的去除,从而提高胸径切片点云质量以达到提高胸径提取精度的目的。
(2)背包激光扫描点云胸径提取精度与切片厚度有关。胸径提取精度随切片厚度的增加而增大,在3种切片厚度下,0.6 m切片更适于背包激光扫描点云胸径提取。
(3)以0.6 m切片厚度、强度区间为[5,10]的点云为最佳胸径切片。在此条件下相比于完整点云胸径提取结果,3块样地RMSE分别降低了65.41%、25.90%和61.71%,MAE分别降低了68.91%、31.96%和65.97%,相对精度分别提高了6.10%、1.95%和5.8%。通过对胸径切片点云强度进行区间划分,并选用最佳强度区间内的点云作为胸径切片,能够从根本上为胸径提取算法的实现提供更好的数据。
(4)使用最佳胸径切片条件下的点云进行胸径提取,3块样地点云使用量分别降低了97.63%、97.25%和97.83%,胸径提取平均用时分别降低了98.50%、97.60%和96.36%。通过利用最佳胸径切片,能够显著降低处理点云的数量,平均用时得到极大降低,胸径提取效率得到极大提高。
参考文献
Static calibration and analysis of the velodyne HDL-64E S2 for high accuracy mobile scanning
[J].
Revealing changes in the stem form and volume allocation in diverse boreal forests using two-date terrestrial laser scanning
[J].
Understanding 3D structural complexity of individual scots pine trees with different management history
[J].
Individual tree segmentation of TLS point cloud data based on clustering of voxels layer by layer
[J].
基于体元逐层聚类的TLS点云数据单木分割算法
[J].
Logs of 3D image reconstruction based on 3D laser scanning technology
[J].
基于三维激光扫描技术的原木三维图像重构
[J].
Research and implementation of single tree measurement method based on 3D laser scanning technology
[D].
Multiplatform mobile laser scanning: usability and performance
[J].
Possibilities of a personal laser scanning system for forest mapping and ecosystem services
[J].
Study on individual tree factor extraction of Larix Olgensis in backpack Lidar
[J].
背包式激光雷达的落叶松单木因子提取
[J].
Diameter distribution estimation with laser scanning based multisource single tree inventory
[J].
Comparison of backpack, handheld, under-canopy UAV, and above-canopy UAV laser scanning for field reference data collection in boreal forests
[J].
Automatic estimation of tree position and stem diameter using a moving terrestrial laser scanner
[J].
Applicability of personal laser scanning in forestry inventory
[J].
Accuracy in estimation of timber assortments and stem distribution–a comparison of airborne and terrestrial laser scanning techniques
[J].
Estimation of diameter at breast height from mobile laser scanning data collected under a heavy forest canopy
[J].
Experimental study on factors influencing echo intensity data of Leica scanstation2 laser scanner
[J].
徕卡ScanStation2激光扫描仪强度数据影响因素实验研究
[J].
Analysis of incidence angle and distance effects on terrestrial laser scanner intensity: search for correction methods
[J].
Correction for incidence angle and distance effects on TLS intensity data
[J].
TLS强度数据的入射角及距离效应改正方法
[J].
The auto-extraction technology of road mark based on laser scanning point clouds
[J].
基于车载三维激光扫描的道路线提取研究
[J].
Extraction of road marks based on urban road characteristics and pint cloud echo information
[J].
结合城区道路特征与点云回波信息的道路标识线提取
[J].
Object points extraction and classification of mobile LiDAR point clouds
[J].
车载激光点云地物提取与分类研究
[J].
Classification of laser scanning altimetry data using laser intensity
[J].
利用激光强度信息分类激光扫描测高数据
[J].
Automatic dendrometry: tree detection, tree height and diameter estimation using terrestrial laser scanning
[J].
Quality analysis and correction of mobile backpack laser scanning data
[J].
Terrestrial laser scanning as an effective tool to retrieve tree level height, crown width, and stem diameter
[J].
Evaluating different methods for estimating diameter at breast height from terrestrial laser scanning
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}