机载LiDAR输电线路杆塔快速定位方法研究
王和平 , 1 , 陈世超 2 , 胡伟 1 , 马春田 1 , 刘宁 1 , 王成 , 2
1.国网通用航空有限公司,北京 102209
2.中国科学院空天信息创新研究院 中科院数字地球重点实验室,北京 100094
Study on Power Pylon Fast Positioning in Transmission Line from Airborne LiDAR Data
Wang Heping , 1 , Chen Shichao 2 , Hu Wei 1 , Ma Chuntian 1 , Liu Ning 1 , Wang Cheng , 2
1.National Grid General Aviation Company Limited,Beijing 102209,China
2.Key Laboratory of Digital Earth,Aerospace Information Research Institute,Chinese Academy of Sciences,Beijing 100094,China
通讯作者: 王成(1975-),男,湖南慈利人,研究员,主要从事激光雷达遥感研究。E⁃mail:wangcheng@aircas.ac.cn
收稿日期: 2021-02-24
修回日期: 2021-11-28
基金资助:
国网通用航空有限公司科技项目 . 2400/2019-44003B
Received: 2021-02-24
Revised: 2021-11-28
作者简介 About authors
王和平(1979-),男,湖北公安人,高级工程师,主要从事直升机电力作业及信息化研究E⁃mail:hopywang79@163.com
, E-mail:hopywang79@163.com
摘要
杆塔位置是机载激光雷达电力巡检应用中进行输电线路点云分段、杆塔提取、变化检测的基础。为了提高其自动定位的精度和效率,提出了一种适用于复杂地形的高压输电线路杆塔自动定位方法。首先在分析了输电线路点云相对高度、垂直和水平分布特征基础上,采用格网预处理剔除低位点格网、聚类分析确定候选类簇,然后利用格网垂直连续分布系数、高程分布系数和凸包系数等识别杆塔点所在格网,并以邻近格网中心作为杆塔水平位置。实验结果表明:相比前人的方法,算法的杆塔定位精度提高了11.7%,查准率和召回率分别提高了50%和20%,尤其是在地形起伏大且不连续的情况下具有较好的普适性。
关键词:
机载激光雷达 点云 输电线路 杆塔定位 格网聚类
Abstract
Precise spatial position of power pylon is the basis for the transmission line point cloud segmentation, power pylon points extraction, and change monitoring in airborne Light Detection and Ranging (LiDAR) power inspection application. In order to improve the algorithm efficiency of its automatic positioning and the accuracy and robustness, an automatic positioning method for the high-voltage transmission line of complex terrain is proposed. Firstly, according to the analysis of the relative height, vertical and horizontal distribution characteristics of the airborne point cloud of the transmission line, a grid preprocessing is used to remove low-level point grid and a grid cluster analysis is applied to determine the candidate clusters, and then based on the grid vertical continuous distribution coefficient, elevation distribution coefficient, convex hull coefficient and so on, the grids where the power pylon points are located, are identified and the adjacent grid center serves as the horizontal position of the power pylon. The experimental results show that compared with the previous methods, the accuracy of the proposed algorithm has increased by 11.7%, the precision and recall rate has increased by 50% and 25% respectively, especially when the terrain is rough and discontinuous, it has better robustness.
Keywords:
Airborne LiDAR Point cloud Transmission power line Power pylon positioning Grid cluster
本文引用格式
王和平, 陈世超, 胡伟, 马春田, 刘宁, 王成. 机载LiDAR输电线路杆塔快速定位方法研究 . 遥感技术与应用 [J], 2021, 36(6): 1306-1310 doi:10.11873/j.issn.1004-0323.2021.6.1306
Wang Heping, Chen Shichao, Hu Wei, Ma Chuntian, Liu Ning, Wang Cheng. Study on Power Pylon Fast Positioning in Transmission Line from Airborne LiDAR Data . Remote Sensing Technology and Application
1 引 言
机载激光雷达(Light Detection And Ranging,LiDAR)获取的高精度高密度三维点云为自动快速确定输电线路杆塔位置提供了可能,而精确的杆塔空间位置是机载LiDAR应用于输电线路点云分段、杆塔提取、杆塔监测和杆塔重建的基础,也是输电线路三维数字重建和智能安全预警分析的基础[1 -3 ] 。
国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究。韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置。游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高。彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰。Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置。宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置。虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响。刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置。
实验通过分析输电线路点云的空间分布特征,充分挖掘杆塔、电力线、植被等主要地物点云的结构特征和空间相关特征,减少周围地物干扰,优化现有特征组合方式和区域生长规则,提出适用于复杂地形的杆塔自动定位算法,并用实验验证方法的效率和精度。
2 研究方法
2.1 输电线路点云特征分析
从相对高度、垂直分布和水平分布3个方面分析输电线路机载LiDAR点云特征。
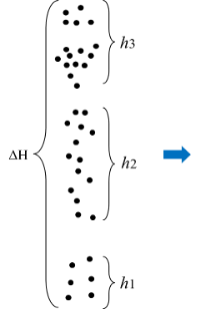
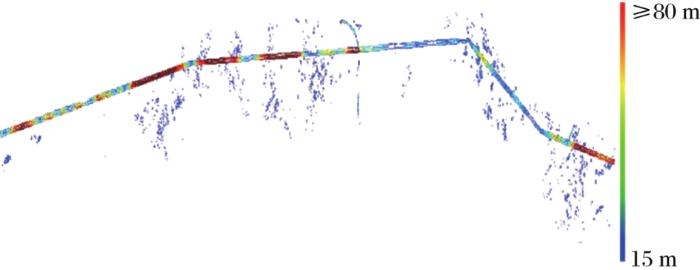
电力线属于架空对象,相对高度取决于所在地形。由于地形起伏较大,导致电力线的相对高度远大于场景中其他地物高度。若地形平坦,则电力线相对高度略低于杆塔。杆塔、高大乔木和建(构)筑物等地物属于非架空对象,相对高度取决于自身高度,不受地形起伏干扰。在垂直分布方面,电力线点云在垂直空间分布多为不连续,杆塔、植被和建筑物等则反之,采用垂直连续分布系数fV [12 ] 表示垂直分布特征(fV 的定义如式(1),其中,ΔH 是单元格的相对高度;基于单元格内点的Z坐标进行欧式聚类,hi 为不同类簇在Z轴上的投影长度)。图1 为垂直连续分布系数分布,可知:①电力线分布区域的fV 值明显低于其他区域,且接近0;②杆塔区域的fV 值明显高于其他电力线分布区域的fV 值,且接近1;③从杆塔中心向外,fV 值逐渐减小,呈凸包分布;④植被分布区域的fV 值均接近1。
f V = ∑ i = 1 n h i Δ H (1)
图1
图1
垂直连续分布系数分布
Fig.1
The distribution of vertical continuous distribution coefficient
由于杆塔附近的fV 呈凸包分布,而植被附近的fV 呈均匀分布,因此可采用fV 值构建二次特征(凸包系数fc )区分高植被和杆塔,凸包系数的计算公式见式(2),式中n 为杆塔附近fV 的总个数。由于杆塔附近的fV 值接近1的较少,而植被附近的较多,通过剔除fVmax ,可以提高杆塔的fV 值,且对植被的fV 值影响较小,进而扩大杆塔与植被凸包系数的差异性,有利于区分杆塔和植被,因此fVi 不等于fVmax 。由于凸包系数受邻域范围的影响,为了凸显杆塔的“凸包”特征,应有较少的格网包含杆塔主体,较多的格网包含杆塔外侧。由于植被分布较密,只要格网长度能包含单个植被在水平面的范围且大于不同植被的间隙即可,因此邻域范围主要取决于杆塔主体在水平面的范围和划分的格网长度,其中格网长度经验值为3 m,搜索范围经验值为5×5格网。
f C = 1 - ∑ i = 1 n - 1 f V i n - 1 (2)
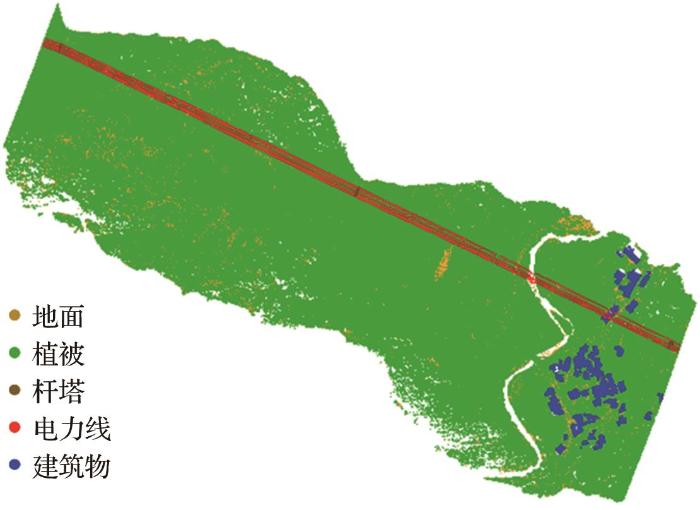
一般来说,电力线和杆塔所在区域呈线性分布且具有一定的长度,建筑物呈块状分布且分布范围较小,而植被通常分布于整个场景,如图2 所示。
图2
图2
输电通道地物分布
Fig.2
Ground features in transmission corridor
2.2 杆塔自动定位算法
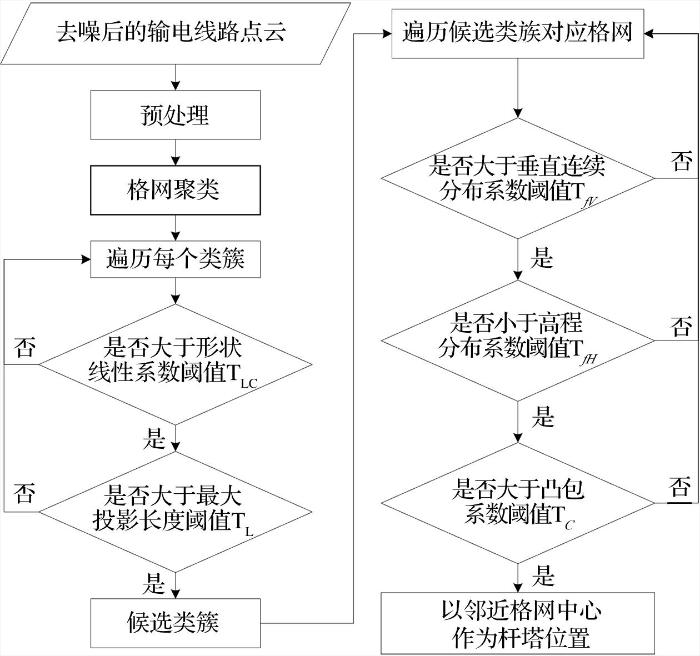
基于上述分析,提出一种适用于复杂地形的杆塔自动定位算法,流程如图3 所示。首先对去噪后的点云进行预处理和归一化,建立二维格网索引;然后设置格网高度阈值,通过格网聚类获取多个格网类簇;通过类簇形状线性系数阈值和最大投影长度阈值获取候选格网类簇;最后基于垂直连续分布系数、高程分布系数和凸包系数确定杆塔所在格网,以邻近格网中心作为杆塔位置。
图3
图3
杆塔定位方法流程图
Fig.3
Workflow of power pylon positioning
2.2.1 点云预处理
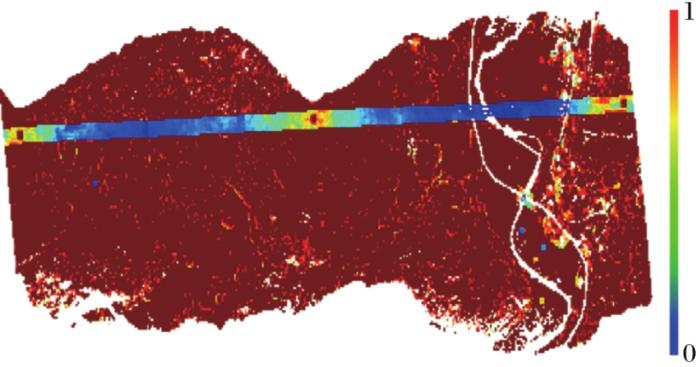
由于杆塔较高且走廊中存在大量的低植被点,为了提高算法效率,通常设置相对高度阈值TH 1 来移除低位点格网[14 -15 ] 。阈值的设定依赖于杆塔高度,即接近且小于输电线路中最低的杆塔高度。通常情况下,杆塔高度与电压等级相关,电压越高,杆塔高度越高。对于不同电压的输电线路,可采用相应的经验值作为TH 1 。当TH 1 = 15 m时,移除相对高度小于TH 1 的格网,如图4 所示,其中电力线分布区域仍然存在大量的干扰点。
图4
图4
移除低位点后点云相对高度
Fig.4
The relative height of point cloud after removing low points
2.2.2 获取候选类簇
采用八邻域生长算法获取多个格网类簇。由于相邻电力线所在格网的最大高程连续,因此设置格网生长规则如下:若相邻格网的最大高程差小于阈值TH 2 ,则视为同一类簇。由于获取的电力线点云可能存在“断裂”和局部电力线斜率大的情况,导致区域生长时未将同一段线路合并为一类,因此设置类簇形状参数用于区分电力线区域和其他区域。
利用主成分分析算法计算每个类簇点集的特征值λ 1 、λ 2 (λ 1 >λ 2 )及其对应的特征向量v 1 、v 2 。然后采用式(3)计算每个类簇的形状线性系数LC 和最大投影长度PL ,式中Xi 为投影前的点向量。若LC > TLC PL > TL
L C = 1 - λ 2 λ 1 P L = M a x ( X i · v 1 | | v 1 | | ) - M i n ( X i · v 1 | | v 1 | | ) i = 1,2 , ⋯ , n → L C > T L C P L > T L ⇒ (3)
2.2.3 识别杆塔格网
候选格网类簇主要由杆塔点、电力线点和高植被点组成。由于电力线所在格网的垂直连续分布系数fV 较小,可采用垂直连续分布系数阈值TV TV 很难剔除高植被格网。由于杆塔的最大高程为邻近局部范围内的最大高程,且其局部范围内的垂直连续分布系数近似凸包分布,可设置高程分布系数f H 和凸包系数fC 剔除高植被格网。采用式(4)计算f H ,式中GH 为格网高程,GHmax 为局部范围内的最大高程,TH 为高程分布系数阈值,TC 为凸包系数阈值。由于同一个杆塔存在于多个格网,以邻近格网的中心作为杆塔水平位置。
f V = ∑ i = 1 n h i Δ H f C = 1 - ∑ i = 1 n - 1 f V i n - 1 f H = G H m a x - G H G △ H → f V > T V f C > T C f H < T H ⇒ 杆 塔 格 网 (4)
3 实验结果与分析
选用3个不同区域的输电走廊点云数据集(以数据1、2、3区分),分别采用所提算法和文献[12 ]的杆塔定位算法进行实验,点云详细信息见表1 。地形不连续是指点云中存在池塘或悬崖等,地形主要影响格网相对高度的计算,池塘所在格网的相对高度较低,悬崖所在格网的相对高度较高。采用C++编写杆塔自动定位程序,算法的杆塔定位参数取值见表2 。
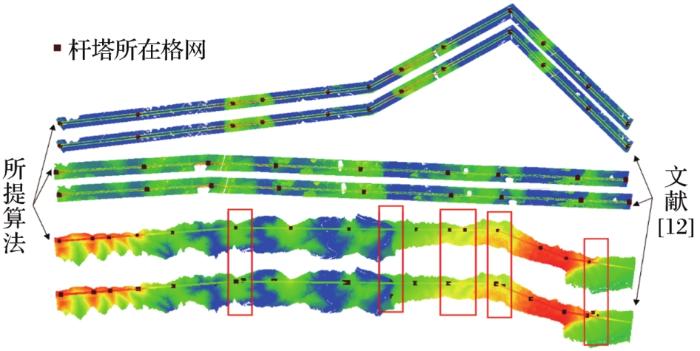
若定位得到的格网中包含杆塔主干结构且每个格网中都存在杆塔点,则杆塔定位正确,采用查准率P 、召回率R 和F 1值对定位结果进行精度定量评价,结果如表3 和图5 所示。对数据1和2,两种算法的定位精度一致;数据3,本实验算法的查准率、召回率和F1值分别提高了50%、20%和35%(图5 中红色框表明两种算法的部分结果差异);以3种数据的平均F1值作为杆塔定位精度,本实验算法的定位精度提高了11.7%,耗时少(4.1 s/km)。
图5
图5
杆塔定位结果
Fig.5
The result of pylon positioning
4 结 语
实验提出了一种适用于复杂地形的高压输电线路杆塔自动定位方法,并通过实验验证算法的精度和有效性,为后续输电线路点云分段、杆塔提取、杆塔监测、三维重建和智能电网管理等提供支持。在研究中发现,杆塔自动定位算法中存在两个稳定性较差的参数,即相对高度和最大投影长度,相对高度较大会移除大量低位格网,若超过输电线路中杆塔的最低高度,会移除杆塔所在格网、降低杆塔定位精度;反之,则会增加杆塔定位难度同时降低算法效率。在后续研究中需要进行大量的算法平衡性测试,用于优化相对高度参数,平衡算法精度和效率。由于获取的电力线点云可能存在“断裂”以及杆塔附近的植被高度与杆塔高度相似,在进行格网聚类时会获取“碎片”状类簇或包含大量的植被格网,进而干扰最大投影长度参数取值。因此需要进一步对格网聚类规则进行优化,根据局部点云结构增加约束条件,提高聚类准确度和稳定性,进而提高最大投影长度参数取值的稳定性。
参考文献
View Option
[1]
Wang Pinghua Xi Xiaohuan Wang Cheng et al Study on power line fast extraction based on Airborne LiDAR data
[J]. Science of Surveying and Mapping , 2017 , 42 (2 ): 154 -158 ,171 .
[本文引用: 1]
王平华 , 习晓环 , 王成 , 等 机载激光雷达数据快速提取电力线研究
[J]. 测绘科学 , 2017 , 42 (2 ): 154 -158 ,171 .
[本文引用: 1]
[2]
Lin Xiangguo Zhang Jixian 3 D power line reconstruction from Aireborne LiDAR point cloud overhead electric power transmission corridors
[J]. Acta Geodaetica et Cartographica Sinica ,2016,45 (3 ):347 -353 .
林祥国 , 张继贤 架空输电线路机载激光雷达点云电力线三维重建
[J]. 测绘学报 ,2016 ,45 (3 ):347 -353 .
[3]
Chen S C Wang C Dai H Y et al Power pylon reconstruction based on abstract template structures using Airborne LiDAR data
[J]. Remote Sensing ,2019 ,11 (13 ):1579 . DOI: 10.3390/rs11131579 .
[本文引用: 1]
[4]
Han Wenjun Xiao Xue Study on transmission tower modeling method based on Airborne LiDAR data
[J]. Yangtze River , 2012 ,43 (8 ):22 -25 .
[本文引用: 1]
韩文军 ,肖雪 基于机载LiDAR数据的输电铁塔建模方法研究
[J].人民长江 ,2012 ,43 (8 ):22 -25 .
[本文引用: 1]
[5]
You Anqing Han Xiaoyan Li Shiping et al Transmission lines fitting and tower positioning in LiDAR point cloud
[J]. Computer Science ,2013 ,40 (4 ):298 -300 .
[本文引用: 1]
游安清 ,韩晓言 ,李世平 ,等 激光点云中输电线拟合与杆塔定位方法研究
[J]. 计算机科学 ,2013 ,40 (4 ):298 -300 .
[本文引用: 1]
[6]
Liu Zhengjun Liang Jing Zhang Jixian Power lines extraction from Airborne LiDAR data using spatial domain segmentation
[J]. Journal of Remote Sensing ,2014 ,18 (1 ):61 -76 .
刘正军 ,梁静 ,张继贤 空间域分割的机载LiDAR数据输电线快速提取
[J]. 遥感学报 ,2014 ,18 (1 ):61 -76 .
[7]
Lai Guangling Qin Zhiyuan Ding Lu Extraction of power lines and poles based on mobile LiDAR data
[J]. Journal of Geomatics Science and Technology ,2016 ,33 (6 ):617 -622 .
赖广陵 ,秦志远 ,丁璐 车载LiDAR数据电力线与塔杆提取方法
[J]. 测绘科学技术学报 ,2016 ,33 (6 ):617 -622 .
[8]
Shen Xiaojun Qin Chuan Du Yong et al An automatic power line extraction method from airborne light detection and ranging point cloud in complex terrain
[J]. Journal of Tongji University(Natural Science Edition) ,2018 ,46 (7 ):982 -987 .
[本文引用: 1]
沈小军 ,秦川 ,杜勇 ,等 复杂地形电力线机载激光雷达点云自动提取方法
[J]. 同济大学学报(自然科学版) ,2018 ,46 (7 ):982 -987 .
[本文引用: 1]
[9]
Peng Xiangyang Song Shuang Qian Jinju et al Research on automatic positioning algorithm of power transmission towers based on UAV LiDAR
[J]. Power System Technology , 2017 ,41 (11 ):3670 -3677 .
[本文引用: 1]
彭向阳 ,宋爽 ,钱金菊 ,等 无人机激光扫描作业杆塔位置提取算法研究
[J]. 电网技术 ,2017 ,41 (11 ):3670 -3677 .
[本文引用: 1]
[10]
Awrangjeb M Jonas D Zhou J An automatic technique for power line pylon detection from point cloud data
[C]∥International Conference on Digital Image Computing-Techniques and Applications(DICTA) ,2017 :532 -539 . DOI: 10.1109/DICTA.2017.8227407 .
[本文引用: 1]
[11]
Song Shuang 3 D feature extraction of power transmission corridor based on Airborne LiDAR point clouds
[D].Wuhan : Wuhan University , 2017 .
[本文引用: 1]
宋爽 基于机载LiDAR点云的电力走廊三维要素提取技术
[D]. 武汉 : 武汉大学 , 2017 .
[本文引用: 1]
[12]
Guo Tao Shen Ping Shi Lei et al Study on power tower extraction and fast positioning from Airborne LiDAR data
[J]. Remote sensing Technology and Application ,2018 ,33 (3 ):530 -535 .
[本文引用: 4]
虢涛 ,沈平 ,时磊 ,等 机载LiDAR快速定位高压线塔方法研究
[J]. 遥感技术与应用 ,2018 ,33 (3 ):530 -535 .
[本文引用: 4]
[13]
Liu Yang Yang Bisheng Liang Fuxun An automatically recognizing method for transmission tower from ALS point cloud
[J]. Bulletin of Surveying and Mapping ,2019 (1 ):34 -38 .刘洋,杨必胜,梁福逊. 机载激光点云中高压电塔自动识别方法[J]. 测绘通报,2019,(1 ):34 -38 .
[本文引用: 1]
[14]
Yang Yuan Chen Fengxiang Guo Tao et al Power line extraction using Airborne LiDAR point clouds characteristics and model fitting method
[J]. Journal of University of Chinese Academy of Sciences ,2018 ,35 (5 ):612 -616 .
[本文引用: 1]
杨渊 ,陈凤翔 ,虢韬 ,等 基于LiDAR点云特征和模型拟合的高压线提取
[J]. 中国科学院大学学报 ,2018 ,35 (5 ):612 -616 .
[本文引用: 1]
[15]
Ma Weifeng Wang Jinliang Wang Cheng et al An extraction algorithm of power lines from Airborne LiDAR point cloud
[J]. Journal of Geomatics Science and Technology ,2019 ,36 (1 ):39 -44 .
[本文引用: 1]
麻卫峰 ,王金亮 ,王成 ,等 一种基于机载LiDAR点云电力线自动提取方法
[J]. 测绘科学技术学报 ,2019 ,36 (1 ):39 -44 .
[本文引用: 1]
机载激光雷达数据快速提取电力线研究
1
2017
... 机载激光雷达(Light Detection And Ranging,LiDAR)获取的高精度高密度三维点云为自动快速确定输电线路杆塔位置提供了可能,而精确的杆塔空间位置是机载LiDAR应用于输电线路点云分段、杆塔提取、杆塔监测和杆塔重建的基础,也是输电线路三维数字重建和智能安全预警分析的基础[1 -3 ] . ...
机载激光雷达数据快速提取电力线研究
1
2017
... 机载激光雷达(Light Detection And Ranging,LiDAR)获取的高精度高密度三维点云为自动快速确定输电线路杆塔位置提供了可能,而精确的杆塔空间位置是机载LiDAR应用于输电线路点云分段、杆塔提取、杆塔监测和杆塔重建的基础,也是输电线路三维数字重建和智能安全预警分析的基础[1 -3 ] . ...
架空输电线路机载激光雷达点云电力线三维重建
0
2016
架空输电线路机载激光雷达点云电力线三维重建
0
2016
Power pylon reconstruction based on abstract template structures using Airborne LiDAR data
1
2019
... 机载激光雷达(Light Detection And Ranging,LiDAR)获取的高精度高密度三维点云为自动快速确定输电线路杆塔位置提供了可能,而精确的杆塔空间位置是机载LiDAR应用于输电线路点云分段、杆塔提取、杆塔监测和杆塔重建的基础,也是输电线路三维数字重建和智能安全预警分析的基础[1 -3 ] . ...
基于机载LiDAR数据的输电铁塔建模方法研究
1
2012
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
基于机载LiDAR数据的输电铁塔建模方法研究
1
2012
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
激光点云中输电线拟合与杆塔定位方法研究
1
2013
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
激光点云中输电线拟合与杆塔定位方法研究
1
2013
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
空间域分割的机载LiDAR数据输电线快速提取
0
2014
空间域分割的机载LiDAR数据输电线快速提取
0
2014
车载LiDAR数据电力线与塔杆提取方法
0
2016
车载LiDAR数据电力线与塔杆提取方法
0
2016
复杂地形电力线机载激光雷达点云自动提取方法
1
2018
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
复杂地形电力线机载激光雷达点云自动提取方法
1
2018
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
无人机激光扫描作业杆塔位置提取算法研究
1
2017
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
无人机激光扫描作业杆塔位置提取算法研究
1
2017
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
An automatic technique for power line pylon detection from point cloud data
1
2017
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
基于机载LiDAR点云的电力走廊三维要素提取技术
1
2017
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
基于机载LiDAR点云的电力走廊三维要素提取技术
1
2017
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
机载LiDAR快速定位高压线塔方法研究
4
2018
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
... 电力线属于架空对象,相对高度取决于所在地形.由于地形起伏较大,导致电力线的相对高度远大于场景中其他地物高度.若地形平坦,则电力线相对高度略低于杆塔.杆塔、高大乔木和建(构)筑物等地物属于非架空对象,相对高度取决于自身高度,不受地形起伏干扰.在垂直分布方面,电力线点云在垂直空间分布多为不连续,杆塔、植被和建筑物等则反之,采用垂直连续分布系数fV [12 ] 表示垂直分布特征(fV 的定义如式(1) ,其中,ΔH 是单元格的相对高度;基于单元格内点的Z坐标进行欧式聚类,hi 为不同类簇在Z轴上的投影长度).图1 为垂直连续分布系数分布,可知:①电力线分布区域的fV 值明显低于其他区域,且接近0;②杆塔区域的fV 值明显高于其他电力线分布区域的fV 值,且接近1;③从杆塔中心向外,fV 值逐渐减小,呈凸包分布;④植被分布区域的fV 值均接近1. ...
... 选用3个不同区域的输电走廊点云数据集(以数据1、2、3区分),分别采用所提算法和文献[12 ]的杆塔定位算法进行实验,点云详细信息见表1 .地形不连续是指点云中存在池塘或悬崖等,地形主要影响格网相对高度的计算,池塘所在格网的相对高度较低,悬崖所在格网的相对高度较高.采用C++编写杆塔自动定位程序,算法的杆塔定位参数取值见表2 . ...
... Positioning accuracy and efficiency of Power Pylon
Table 3 序号 本实验算法 文献[12 ] P R F1 Efficiency(s/km) P R F1 1 100% 100% 100% 3.4 100% 100% 100% 2 100% 100% 100% 3.0 100% 100% 100% 3 100% 100% 100% 5.8 50.0% 80.0% 65.0% 平均值 100% 100% 100% 4.1 83.3% 93.3% 88.3%
图5 杆塔定位结果 The result of pylon positioning Fig.5 ![]()
4 结 语 实验提出了一种适用于复杂地形的高压输电线路杆塔自动定位方法,并通过实验验证算法的精度和有效性,为后续输电线路点云分段、杆塔提取、杆塔监测、三维重建和智能电网管理等提供支持.在研究中发现,杆塔自动定位算法中存在两个稳定性较差的参数,即相对高度和最大投影长度,相对高度较大会移除大量低位格网,若超过输电线路中杆塔的最低高度,会移除杆塔所在格网、降低杆塔定位精度;反之,则会增加杆塔定位难度同时降低算法效率.在后续研究中需要进行大量的算法平衡性测试,用于优化相对高度参数,平衡算法精度和效率.由于获取的电力线点云可能存在“断裂”以及杆塔附近的植被高度与杆塔高度相似,在进行格网聚类时会获取“碎片”状类簇或包含大量的植被格网,进而干扰最大投影长度参数取值.因此需要进一步对格网聚类规则进行优化,根据局部点云结构增加约束条件,提高聚类准确度和稳定性,进而提高最大投影长度参数取值的稳定性. ...
机载LiDAR快速定位高压线塔方法研究
4
2018
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
... 电力线属于架空对象,相对高度取决于所在地形.由于地形起伏较大,导致电力线的相对高度远大于场景中其他地物高度.若地形平坦,则电力线相对高度略低于杆塔.杆塔、高大乔木和建(构)筑物等地物属于非架空对象,相对高度取决于自身高度,不受地形起伏干扰.在垂直分布方面,电力线点云在垂直空间分布多为不连续,杆塔、植被和建筑物等则反之,采用垂直连续分布系数fV [12 ] 表示垂直分布特征(fV 的定义如式(1) ,其中,ΔH 是单元格的相对高度;基于单元格内点的Z坐标进行欧式聚类,hi 为不同类簇在Z轴上的投影长度).图1 为垂直连续分布系数分布,可知:①电力线分布区域的fV 值明显低于其他区域,且接近0;②杆塔区域的fV 值明显高于其他电力线分布区域的fV 值,且接近1;③从杆塔中心向外,fV 值逐渐减小,呈凸包分布;④植被分布区域的fV 值均接近1. ...
... 选用3个不同区域的输电走廊点云数据集(以数据1、2、3区分),分别采用所提算法和文献[12 ]的杆塔定位算法进行实验,点云详细信息见表1 .地形不连续是指点云中存在池塘或悬崖等,地形主要影响格网相对高度的计算,池塘所在格网的相对高度较低,悬崖所在格网的相对高度较高.采用C++编写杆塔自动定位程序,算法的杆塔定位参数取值见表2 . ...
... Positioning accuracy and efficiency of Power Pylon
Table 3 序号 本实验算法 文献[12 ] P R F1 Efficiency(s/km) P R F1 1 100% 100% 100% 3.4 100% 100% 100% 2 100% 100% 100% 3.0 100% 100% 100% 3 100% 100% 100% 5.8 50.0% 80.0% 65.0% 平均值 100% 100% 100% 4.1 83.3% 93.3% 88.3%
图5 杆塔定位结果 The result of pylon positioning Fig.5 ![]()
4 结 语 实验提出了一种适用于复杂地形的高压输电线路杆塔自动定位方法,并通过实验验证算法的精度和有效性,为后续输电线路点云分段、杆塔提取、杆塔监测、三维重建和智能电网管理等提供支持.在研究中发现,杆塔自动定位算法中存在两个稳定性较差的参数,即相对高度和最大投影长度,相对高度较大会移除大量低位格网,若超过输电线路中杆塔的最低高度,会移除杆塔所在格网、降低杆塔定位精度;反之,则会增加杆塔定位难度同时降低算法效率.在后续研究中需要进行大量的算法平衡性测试,用于优化相对高度参数,平衡算法精度和效率.由于获取的电力线点云可能存在“断裂”以及杆塔附近的植被高度与杆塔高度相似,在进行格网聚类时会获取“碎片”状类簇或包含大量的植被格网,进而干扰最大投影长度参数取值.因此需要进一步对格网聚类规则进行优化,根据局部点云结构增加约束条件,提高聚类准确度和稳定性,进而提高最大投影长度参数取值的稳定性. ...
An automatically recognizing method for transmission tower from ALS point cloud
1
2019
... 国内外学者在利用机载LiDAR定位杆塔方面开展了大量研究.韩文军等[4 ] 利用霍夫变换提取电力线,并基于电力线的连接点位确定杆塔位置.游安清等[5 -8 ] 通过局部最大点密度确定杆塔的水平位置,效率高,但易受水塔、信号塔、高植被和建筑物等干扰,普适性有待提高.彭向阳等[9 ] 基于杆塔点的局部高密度、大坡度和大高差特征确定杆塔的水平位置,但同样易受周围类似地物的干扰.Awrangje等[10 ] 采用高程阈值剔除低位点,将剩余点投影到XY平面生成灰度图像,然后对图像进行连通成分分析获取多个类别点云,最后基于多类点云在水平面的投影形状和垂直方向的分层点密度均值确定杆塔的水平位置.宋爽等[11 ] 基于坡度和强度特征构建原始掩模,并对掩膜图像进行形态学运算,迭代定位局部最大值中心点作为杆塔水平位置.虢韬等[12 ] 采用高程阈值剔除低位点,将其他点投影到XY平面进行格网划分,通过局部最大高程和空间间隔统计比率确定杆塔位置,同样存在易受高地物和复杂地形干扰的问题,而且点云密度、提取的杆塔点云的完整性等都会对提取结果产生影响.刘洋等[13 ] 对滤波后的点云进行格网化特征分析确定杆塔候选区域,然后通过外接邻域网格线性特征确定杆塔格网,采用分层切片确定杆塔的水平中心位置. ...
基于LiDAR点云特征和模型拟合的高压线提取
1
2018
... 由于杆塔较高且走廊中存在大量的低植被点,为了提高算法效率,通常设置相对高度阈值TH 1 来移除低位点格网[14 -15 ] .阈值的设定依赖于杆塔高度,即接近且小于输电线路中最低的杆塔高度.通常情况下,杆塔高度与电压等级相关,电压越高,杆塔高度越高.对于不同电压的输电线路,可采用相应的经验值作为TH 1 .当TH 1 = 15 m时,移除相对高度小于TH 1 的格网,如图4 所示,其中电力线分布区域仍然存在大量的干扰点. ...
基于LiDAR点云特征和模型拟合的高压线提取
1
2018
... 由于杆塔较高且走廊中存在大量的低植被点,为了提高算法效率,通常设置相对高度阈值TH 1 来移除低位点格网[14 -15 ] .阈值的设定依赖于杆塔高度,即接近且小于输电线路中最低的杆塔高度.通常情况下,杆塔高度与电压等级相关,电压越高,杆塔高度越高.对于不同电压的输电线路,可采用相应的经验值作为TH 1 .当TH 1 = 15 m时,移除相对高度小于TH 1 的格网,如图4 所示,其中电力线分布区域仍然存在大量的干扰点. ...
一种基于机载LiDAR点云电力线自动提取方法
1
2019
... 由于杆塔较高且走廊中存在大量的低植被点,为了提高算法效率,通常设置相对高度阈值TH 1 来移除低位点格网[14 -15 ] .阈值的设定依赖于杆塔高度,即接近且小于输电线路中最低的杆塔高度.通常情况下,杆塔高度与电压等级相关,电压越高,杆塔高度越高.对于不同电压的输电线路,可采用相应的经验值作为TH 1 .当TH 1 = 15 m时,移除相对高度小于TH 1 的格网,如图4 所示,其中电力线分布区域仍然存在大量的干扰点. ...
一种基于机载LiDAR点云电力线自动提取方法
1
2019
... 由于杆塔较高且走廊中存在大量的低植被点,为了提高算法效率,通常设置相对高度阈值TH 1 来移除低位点格网[14 -15 ] .阈值的设定依赖于杆塔高度,即接近且小于输电线路中最低的杆塔高度.通常情况下,杆塔高度与电压等级相关,电压越高,杆塔高度越高.对于不同电压的输电线路,可采用相应的经验值作为TH 1 .当TH 1 = 15 m时,移除相对高度小于TH 1 的格网,如图4 所示,其中电力线分布区域仍然存在大量的干扰点. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}