国内外入河排污口管理经验及其对比研究
1
2012
... 入河排污口是水系中主要的污染点源,对其进行科学管理是水功能区限制纳污红线管理的核心工作[1],也是控制污染物入河总量的重要手段[2],对于流域保护以及生态环境监测具有重要意义[3].然而由于排污口管理体系不完善,我国长期面临入河排污口“本底不清,情况不明”的不利局面,极大地制约了生态环境有效监管.加上地形复杂、排污口面广量大、分布不均、违规排污口隐蔽等因素,进一步加大了入河排污口人工排查整治工作的难度.近年来,随着全面加强生态环境保护和坚决打好污染防治攻坚战等国家战略决策的部署,使得摸清排污口底数、掌握陆源入河排污源情况成为了支撑流域水生态环境质量改善的基础性工作. ...
国内外入河排污口管理经验及其对比研究
1
2012
... 入河排污口是水系中主要的污染点源,对其进行科学管理是水功能区限制纳污红线管理的核心工作[1],也是控制污染物入河总量的重要手段[2],对于流域保护以及生态环境监测具有重要意义[3].然而由于排污口管理体系不完善,我国长期面临入河排污口“本底不清,情况不明”的不利局面,极大地制约了生态环境有效监管.加上地形复杂、排污口面广量大、分布不均、违规排污口隐蔽等因素,进一步加大了入河排污口人工排查整治工作的难度.近年来,随着全面加强生态环境保护和坚决打好污染防治攻坚战等国家战略决策的部署,使得摸清排污口底数、掌握陆源入河排污源情况成为了支撑流域水生态环境质量改善的基础性工作. ...
Response of water quality to land use and sewage outfalls in different seasons
1
2019
... 入河排污口是水系中主要的污染点源,对其进行科学管理是水功能区限制纳污红线管理的核心工作[1],也是控制污染物入河总量的重要手段[2],对于流域保护以及生态环境监测具有重要意义[3].然而由于排污口管理体系不完善,我国长期面临入河排污口“本底不清,情况不明”的不利局面,极大地制约了生态环境有效监管.加上地形复杂、排污口面广量大、分布不均、违规排污口隐蔽等因素,进一步加大了入河排污口人工排查整治工作的难度.近年来,随着全面加强生态环境保护和坚决打好污染防治攻坚战等国家战略决策的部署,使得摸清排污口底数、掌握陆源入河排污源情况成为了支撑流域水生态环境质量改善的基础性工作. ...
An improved deep learning approach for retrieving outfalls into rivers from UAS imagery
4
2021
... 入河排污口是水系中主要的污染点源,对其进行科学管理是水功能区限制纳污红线管理的核心工作[1],也是控制污染物入河总量的重要手段[2],对于流域保护以及生态环境监测具有重要意义[3].然而由于排污口管理体系不完善,我国长期面临入河排污口“本底不清,情况不明”的不利局面,极大地制约了生态环境有效监管.加上地形复杂、排污口面广量大、分布不均、违规排污口隐蔽等因素,进一步加大了入河排污口人工排查整治工作的难度.近年来,随着全面加强生态环境保护和坚决打好污染防治攻坚战等国家战略决策的部署,使得摸清排污口底数、掌握陆源入河排污源情况成为了支撑流域水生态环境质量改善的基础性工作. ...
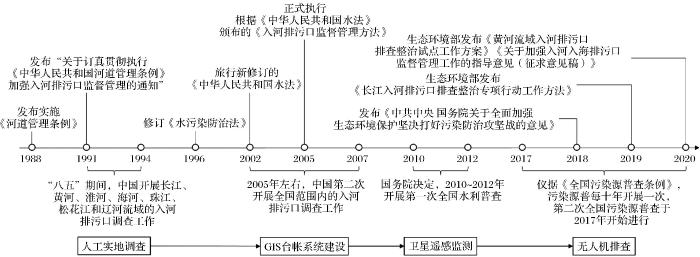
... 自1991年开始的以人工实地调查为主的第一次全国范围的入河排污口排查,到近年借助无人机遥感技术的入河(海)排污口三级排查,我国入河排污口排查工作日趋完善.尤其是厘米级的超高分辨率无人机遥感影像成为排污口目视解译的重要数据源[3],大大提高了入河排污口排查的精度和效率.相对于耗时耗力、效率低、视野窄的人工实地调查以及受云雨天气、重访周期、空间分辨率等因素制约的卫星遥感技术,无人机遥感具有快速灵活、受天气和地形条件制约小、数据精度和获取效率高等优势.然而,其超高的时空分辨率也给传统遥感自动识别方法在排污口排查中的应用带来了巨大困难.因此,采用基于深度学习的目标检测技术[4]可能是未来无人机排污口排查工作的重要研究内容. ...
... 入河排污口体积小、空间分布稀疏且不均,并且可能存在故意遮挡等问题[26],这对利用卫星遥感进行入河排污口排查而言是一项巨大的挑战.机载遥感因具备高空间和时间分辨率的特点,而具备一定的入河排污口排查的能力.近年来,随着无人机技术快速发展及设备成本不断降低,无人机以其灵活、低成本、数据实时采集能力强等优点,成为入河排污口排查的重要手段[27].然而,目前入河排污口无人机遥感识别仍是以目视解译为主[26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
... 基于深度学习的遥感入河排污口识别的研究还较少,当前的各个数据集也没有入河排污口这一类型.鉴于入河排污口的重要性,已有学者开展了相关方面的研究.祁舟[66]基于Faster R-CNN检测算法,设计了一种生成对抗网络来扩充数据集,使用特征融合后的低层特征进行无人机影像的入河排污口的检测,研究表明,该方法随着样本的增加,检测效果显著提升.黄耀欢等[3]使用入河排污口三级排查工作的无人机影像和入河排污口排查结果,基于Faster R-CNN检测算法,在锚框尺寸优化、感兴趣区域数量调整、困难负样本挖掘的基础上,构建了一套基于地学知识的入河排污口深度学习检测算法(GDCNN-outfalls).该算法通过引入空间激活函数以及DSM辅助信息来表达入河排污口空间地学特征,与深度学习算法融合进行入河排污口检测,该模型查全率约为80%,比原始Faster R-CNN检测算法查准率提高超过20倍,比人工目视解译效率提升7倍,展现了基于深度学习进行入河排污口无人机遥感检测的广阔前景.通过上述研究可以发现,入河排污口遥感目标和自然图像目标之间存在巨大差异,将自然图像上训练的深度网络用于入河排污口无人机遥感检测需要在自然图像目标检测网络基础上进行改进以适配无人机遥感图像[67].相比于自然图像,排污口在无人机遥感图像中遥感目标小、少,背景类型复杂,方向随机无序,标注样本数据少,增加了排污口深度学习检测的难度.因此,充分利用入河排污口的地学知识进行深度学习是提高检测精度的一个重要方向.此外,算法层面可通过以下方面进行改进:如提升检测网络对数据量大、背景复杂度高、目标形态多样(如小目标、群目标)的适应性;提升检测网络对目标方向的适应性;提升检测网络对数据域迁移的适应性. ...
Recent advances in deep learning for object detection
2
2020
... 自1991年开始的以人工实地调查为主的第一次全国范围的入河排污口排查,到近年借助无人机遥感技术的入河(海)排污口三级排查,我国入河排污口排查工作日趋完善.尤其是厘米级的超高分辨率无人机遥感影像成为排污口目视解译的重要数据源[3],大大提高了入河排污口排查的精度和效率.相对于耗时耗力、效率低、视野窄的人工实地调查以及受云雨天气、重访周期、空间分辨率等因素制约的卫星遥感技术,无人机遥感具有快速灵活、受天气和地形条件制约小、数据精度和获取效率高等优势.然而,其超高的时空分辨率也给传统遥感自动识别方法在排污口排查中的应用带来了巨大困难.因此,采用基于深度学习的目标检测技术[4]可能是未来无人机排污口排查工作的重要研究内容. ...
... 近期,无锚框的目标检测算法发展非常迅速,它不生成锚框并对其进行修正,其中心思想是将边界框重新定义,一般是定义为点对,如:CornerNet[49]将边界框定义为左上和右下两个角点,直接对它们进行预测;CenterNet[50]在CornerNet的基础上增加中心池化层来关注对象内部信息;ExtremeNet[51]检测上下左右4个极值点以及中心点,枚举出所有4个不同类极值点的边界组合,检查中心点是否正确.一般来说,无锚框的目标检测算法不预先生成锚框,能够得到更高质量的建议区域[4]. ...
Seven major rivers in China are seriously polluted
1
... 我国的排污口管理最初隶属于水利部门,1988年发布实施的《河道管理条例》第一次对水利部门管理入河排污口作出规定.1991年,水利部发布“关于认真贯彻执行《中华人民共和国河道管理条例》加强入河排污口监督管理的通知”,由此开始了全国第一次入河排污口排查工作[5],调查内容包括入河排污口位置、废水量、污染物种类、排放方式、排放规律等,首次获得了我国入河排污口的基本状况[6]. ...
珠江流域入河排污口调查与评价
1
1996
... 我国的排污口管理最初隶属于水利部门,1988年发布实施的《河道管理条例》第一次对水利部门管理入河排污口作出规定.1991年,水利部发布“关于认真贯彻执行《中华人民共和国河道管理条例》加强入河排污口监督管理的通知”,由此开始了全国第一次入河排污口排查工作[5],调查内容包括入河排污口位置、废水量、污染物种类、排放方式、排放规律等,首次获得了我国入河排污口的基本状况[6]. ...
珠江流域入河排污口调查与评价
1
1996
... 我国的排污口管理最初隶属于水利部门,1988年发布实施的《河道管理条例》第一次对水利部门管理入河排污口作出规定.1991年,水利部发布“关于认真贯彻执行《中华人民共和国河道管理条例》加强入河排污口监督管理的通知”,由此开始了全国第一次入河排污口排查工作[5],调查内容包括入河排污口位置、废水量、污染物种类、排放方式、排放规律等,首次获得了我国入河排污口的基本状况[6]. ...
广西入河排污口普查登记信息采集系统研制及应用
1
2006
... 随着大规模的全国性入河排污口排查工作的开展,如何对大量的入河排污口排查数据进行科学的管理就成为后续的主要工作内容.主要工作集中在基于地理信息系统(Geographic Information System, GIS)技术对入河排污口数据进行管理、存储,并与大量相关地理空间数据相结合,建立GIS台账系统实现分析、监测、预警等功能,也形成了一系列区域性或流域性的入河排污口GIS台站系统,如:肖光忠等[7]将掌上电脑、GPS、数码相机进行集成,开发了“广西入河排污口普查登记信息采集系统”;刘耀宾等[8]基于MapX开发了“淮河流域入河排污口信息管理系统”;祝瑜[9]结合Google Earth开发了“长江流域水资源保护监督管理地理信息系统”;张颖等[10]建立了B/S架构的“黄河入河排污口监督管理系统”.GIS台账系统充分发挥了GIS技术的优势,提高了入河排污口排查工作的数字化、智能化水平,为后续入河排污口时空分析、预警工作提供技术支持.但早期的GIS台站系统由于并无统一的标准,各系统之间兼容、共享机制并无完善.同时主要管理的数据来源为地面调查结果,数据量有限,这也在一定程度上催生了以卫星遥感为数据源的入河排污口排查工作的开展. ...
广西入河排污口普查登记信息采集系统研制及应用
1
2006
... 随着大规模的全国性入河排污口排查工作的开展,如何对大量的入河排污口排查数据进行科学的管理就成为后续的主要工作内容.主要工作集中在基于地理信息系统(Geographic Information System, GIS)技术对入河排污口数据进行管理、存储,并与大量相关地理空间数据相结合,建立GIS台账系统实现分析、监测、预警等功能,也形成了一系列区域性或流域性的入河排污口GIS台站系统,如:肖光忠等[7]将掌上电脑、GPS、数码相机进行集成,开发了“广西入河排污口普查登记信息采集系统”;刘耀宾等[8]基于MapX开发了“淮河流域入河排污口信息管理系统”;祝瑜[9]结合Google Earth开发了“长江流域水资源保护监督管理地理信息系统”;张颖等[10]建立了B/S架构的“黄河入河排污口监督管理系统”.GIS台账系统充分发挥了GIS技术的优势,提高了入河排污口排查工作的数字化、智能化水平,为后续入河排污口时空分析、预警工作提供技术支持.但早期的GIS台站系统由于并无统一的标准,各系统之间兼容、共享机制并无完善.同时主要管理的数据来源为地面调查结果,数据量有限,这也在一定程度上催生了以卫星遥感为数据源的入河排污口排查工作的开展. ...
浅谈基于MapX开发的淮河流域入河排污口信息管理系统
1
2008
... 随着大规模的全国性入河排污口排查工作的开展,如何对大量的入河排污口排查数据进行科学的管理就成为后续的主要工作内容.主要工作集中在基于地理信息系统(Geographic Information System, GIS)技术对入河排污口数据进行管理、存储,并与大量相关地理空间数据相结合,建立GIS台账系统实现分析、监测、预警等功能,也形成了一系列区域性或流域性的入河排污口GIS台站系统,如:肖光忠等[7]将掌上电脑、GPS、数码相机进行集成,开发了“广西入河排污口普查登记信息采集系统”;刘耀宾等[8]基于MapX开发了“淮河流域入河排污口信息管理系统”;祝瑜[9]结合Google Earth开发了“长江流域水资源保护监督管理地理信息系统”;张颖等[10]建立了B/S架构的“黄河入河排污口监督管理系统”.GIS台账系统充分发挥了GIS技术的优势,提高了入河排污口排查工作的数字化、智能化水平,为后续入河排污口时空分析、预警工作提供技术支持.但早期的GIS台站系统由于并无统一的标准,各系统之间兼容、共享机制并无完善.同时主要管理的数据来源为地面调查结果,数据量有限,这也在一定程度上催生了以卫星遥感为数据源的入河排污口排查工作的开展. ...
浅谈基于MapX开发的淮河流域入河排污口信息管理系统
1
2008
... 随着大规模的全国性入河排污口排查工作的开展,如何对大量的入河排污口排查数据进行科学的管理就成为后续的主要工作内容.主要工作集中在基于地理信息系统(Geographic Information System, GIS)技术对入河排污口数据进行管理、存储,并与大量相关地理空间数据相结合,建立GIS台账系统实现分析、监测、预警等功能,也形成了一系列区域性或流域性的入河排污口GIS台站系统,如:肖光忠等[7]将掌上电脑、GPS、数码相机进行集成,开发了“广西入河排污口普查登记信息采集系统”;刘耀宾等[8]基于MapX开发了“淮河流域入河排污口信息管理系统”;祝瑜[9]结合Google Earth开发了“长江流域水资源保护监督管理地理信息系统”;张颖等[10]建立了B/S架构的“黄河入河排污口监督管理系统”.GIS台账系统充分发挥了GIS技术的优势,提高了入河排污口排查工作的数字化、智能化水平,为后续入河排污口时空分析、预警工作提供技术支持.但早期的GIS台站系统由于并无统一的标准,各系统之间兼容、共享机制并无完善.同时主要管理的数据来源为地面调查结果,数据量有限,这也在一定程度上催生了以卫星遥感为数据源的入河排污口排查工作的开展. ...
GIS技术在入河排污口监督管理中的应用
1
2011
... 随着大规模的全国性入河排污口排查工作的开展,如何对大量的入河排污口排查数据进行科学的管理就成为后续的主要工作内容.主要工作集中在基于地理信息系统(Geographic Information System, GIS)技术对入河排污口数据进行管理、存储,并与大量相关地理空间数据相结合,建立GIS台账系统实现分析、监测、预警等功能,也形成了一系列区域性或流域性的入河排污口GIS台站系统,如:肖光忠等[7]将掌上电脑、GPS、数码相机进行集成,开发了“广西入河排污口普查登记信息采集系统”;刘耀宾等[8]基于MapX开发了“淮河流域入河排污口信息管理系统”;祝瑜[9]结合Google Earth开发了“长江流域水资源保护监督管理地理信息系统”;张颖等[10]建立了B/S架构的“黄河入河排污口监督管理系统”.GIS台账系统充分发挥了GIS技术的优势,提高了入河排污口排查工作的数字化、智能化水平,为后续入河排污口时空分析、预警工作提供技术支持.但早期的GIS台站系统由于并无统一的标准,各系统之间兼容、共享机制并无完善.同时主要管理的数据来源为地面调查结果,数据量有限,这也在一定程度上催生了以卫星遥感为数据源的入河排污口排查工作的开展. ...
GIS技术在入河排污口监督管理中的应用
1
2011
... 随着大规模的全国性入河排污口排查工作的开展,如何对大量的入河排污口排查数据进行科学的管理就成为后续的主要工作内容.主要工作集中在基于地理信息系统(Geographic Information System, GIS)技术对入河排污口数据进行管理、存储,并与大量相关地理空间数据相结合,建立GIS台账系统实现分析、监测、预警等功能,也形成了一系列区域性或流域性的入河排污口GIS台站系统,如:肖光忠等[7]将掌上电脑、GPS、数码相机进行集成,开发了“广西入河排污口普查登记信息采集系统”;刘耀宾等[8]基于MapX开发了“淮河流域入河排污口信息管理系统”;祝瑜[9]结合Google Earth开发了“长江流域水资源保护监督管理地理信息系统”;张颖等[10]建立了B/S架构的“黄河入河排污口监督管理系统”.GIS台账系统充分发挥了GIS技术的优势,提高了入河排污口排查工作的数字化、智能化水平,为后续入河排污口时空分析、预警工作提供技术支持.但早期的GIS台站系统由于并无统一的标准,各系统之间兼容、共享机制并无完善.同时主要管理的数据来源为地面调查结果,数据量有限,这也在一定程度上催生了以卫星遥感为数据源的入河排污口排查工作的开展. ...
黄河入河排污口监督管理系统的设计与实现
1
2012
... 随着大规模的全国性入河排污口排查工作的开展,如何对大量的入河排污口排查数据进行科学的管理就成为后续的主要工作内容.主要工作集中在基于地理信息系统(Geographic Information System, GIS)技术对入河排污口数据进行管理、存储,并与大量相关地理空间数据相结合,建立GIS台账系统实现分析、监测、预警等功能,也形成了一系列区域性或流域性的入河排污口GIS台站系统,如:肖光忠等[7]将掌上电脑、GPS、数码相机进行集成,开发了“广西入河排污口普查登记信息采集系统”;刘耀宾等[8]基于MapX开发了“淮河流域入河排污口信息管理系统”;祝瑜[9]结合Google Earth开发了“长江流域水资源保护监督管理地理信息系统”;张颖等[10]建立了B/S架构的“黄河入河排污口监督管理系统”.GIS台账系统充分发挥了GIS技术的优势,提高了入河排污口排查工作的数字化、智能化水平,为后续入河排污口时空分析、预警工作提供技术支持.但早期的GIS台站系统由于并无统一的标准,各系统之间兼容、共享机制并无完善.同时主要管理的数据来源为地面调查结果,数据量有限,这也在一定程度上催生了以卫星遥感为数据源的入河排污口排查工作的开展. ...
黄河入河排污口监督管理系统的设计与实现
1
2012
... 随着大规模的全国性入河排污口排查工作的开展,如何对大量的入河排污口排查数据进行科学的管理就成为后续的主要工作内容.主要工作集中在基于地理信息系统(Geographic Information System, GIS)技术对入河排污口数据进行管理、存储,并与大量相关地理空间数据相结合,建立GIS台账系统实现分析、监测、预警等功能,也形成了一系列区域性或流域性的入河排污口GIS台站系统,如:肖光忠等[7]将掌上电脑、GPS、数码相机进行集成,开发了“广西入河排污口普查登记信息采集系统”;刘耀宾等[8]基于MapX开发了“淮河流域入河排污口信息管理系统”;祝瑜[9]结合Google Earth开发了“长江流域水资源保护监督管理地理信息系统”;张颖等[10]建立了B/S架构的“黄河入河排污口监督管理系统”.GIS台账系统充分发挥了GIS技术的优势,提高了入河排污口排查工作的数字化、智能化水平,为后续入河排污口时空分析、预警工作提供技术支持.但早期的GIS台站系统由于并无统一的标准,各系统之间兼容、共享机制并无完善.同时主要管理的数据来源为地面调查结果,数据量有限,这也在一定程度上催生了以卫星遥感为数据源的入河排污口排查工作的开展. ...
遥感技术在淮北市环境“三废”调查中的应用
1
1997
... 2000年前后,我国就开始使用遥感数据辅助入河排污口排查工作.由于入河排污口地物目标较小,最初采用的是通过对航空相片目视解译识别出污染水体,再进一步在这些重点区域识别入河排污口[11-12].随着卫星遥感技术的发展,其影像空间、时间、光谱分辨率的不断提高,获取也越来越方便,中高分辨率的卫星遥感影像开始成为入河排污口排查工作重要的辅助数据源,如邬明权等[13]先是使用Landsat TM影像根据叶绿素a和总悬浮物浓度两项指标提取了渤海的重点污染区域,再使用空间分辨率为0.6 m的QuickBird卫星影像在这些重点区域对渤海陆源入海排污口进行了目视解译.虽然尺度较大的污染水体可以使用卫星遥感通过水环境指标进行(半)自动化的提取,但具体到尺度较小的排污口,识别方法仍主要是目视解译,需要大量的人工参与.受限于卫星重访周期、影像空间分辨率、排污口遥感自动识别方法的准确性等因素,卫星遥感监测只是人工实地排查的辅助手段,不适合作为一种单独的技术应用于业务化的入河排污口排查工作中,如:2010~2012年开展的第一次全国水利普查仍以人工实地调查为主. ...
遥感技术在淮北市环境“三废”调查中的应用
1
1997
... 2000年前后,我国就开始使用遥感数据辅助入河排污口排查工作.由于入河排污口地物目标较小,最初采用的是通过对航空相片目视解译识别出污染水体,再进一步在这些重点区域识别入河排污口[11-12].随着卫星遥感技术的发展,其影像空间、时间、光谱分辨率的不断提高,获取也越来越方便,中高分辨率的卫星遥感影像开始成为入河排污口排查工作重要的辅助数据源,如邬明权等[13]先是使用Landsat TM影像根据叶绿素a和总悬浮物浓度两项指标提取了渤海的重点污染区域,再使用空间分辨率为0.6 m的QuickBird卫星影像在这些重点区域对渤海陆源入海排污口进行了目视解译.虽然尺度较大的污染水体可以使用卫星遥感通过水环境指标进行(半)自动化的提取,但具体到尺度较小的排污口,识别方法仍主要是目视解译,需要大量的人工参与.受限于卫星重访周期、影像空间分辨率、排污口遥感自动识别方法的准确性等因素,卫星遥感监测只是人工实地排查的辅助手段,不适合作为一种单独的技术应用于业务化的入河排污口排查工作中,如:2010~2012年开展的第一次全国水利普查仍以人工实地调查为主. ...
遥感技术在上海苏州河水污染监测中的应用
1
2003
... 2000年前后,我国就开始使用遥感数据辅助入河排污口排查工作.由于入河排污口地物目标较小,最初采用的是通过对航空相片目视解译识别出污染水体,再进一步在这些重点区域识别入河排污口[11-12].随着卫星遥感技术的发展,其影像空间、时间、光谱分辨率的不断提高,获取也越来越方便,中高分辨率的卫星遥感影像开始成为入河排污口排查工作重要的辅助数据源,如邬明权等[13]先是使用Landsat TM影像根据叶绿素a和总悬浮物浓度两项指标提取了渤海的重点污染区域,再使用空间分辨率为0.6 m的QuickBird卫星影像在这些重点区域对渤海陆源入海排污口进行了目视解译.虽然尺度较大的污染水体可以使用卫星遥感通过水环境指标进行(半)自动化的提取,但具体到尺度较小的排污口,识别方法仍主要是目视解译,需要大量的人工参与.受限于卫星重访周期、影像空间分辨率、排污口遥感自动识别方法的准确性等因素,卫星遥感监测只是人工实地排查的辅助手段,不适合作为一种单独的技术应用于业务化的入河排污口排查工作中,如:2010~2012年开展的第一次全国水利普查仍以人工实地调查为主. ...
遥感技术在上海苏州河水污染监测中的应用
1
2003
... 2000年前后,我国就开始使用遥感数据辅助入河排污口排查工作.由于入河排污口地物目标较小,最初采用的是通过对航空相片目视解译识别出污染水体,再进一步在这些重点区域识别入河排污口[11-12].随着卫星遥感技术的发展,其影像空间、时间、光谱分辨率的不断提高,获取也越来越方便,中高分辨率的卫星遥感影像开始成为入河排污口排查工作重要的辅助数据源,如邬明权等[13]先是使用Landsat TM影像根据叶绿素a和总悬浮物浓度两项指标提取了渤海的重点污染区域,再使用空间分辨率为0.6 m的QuickBird卫星影像在这些重点区域对渤海陆源入海排污口进行了目视解译.虽然尺度较大的污染水体可以使用卫星遥感通过水环境指标进行(半)自动化的提取,但具体到尺度较小的排污口,识别方法仍主要是目视解译,需要大量的人工参与.受限于卫星重访周期、影像空间分辨率、排污口遥感自动识别方法的准确性等因素,卫星遥感监测只是人工实地排查的辅助手段,不适合作为一种单独的技术应用于业务化的入河排污口排查工作中,如:2010~2012年开展的第一次全国水利普查仍以人工实地调查为主. ...
渤海陆源入海排污口的多尺度遥感监测分析
5
2012
... 2000年前后,我国就开始使用遥感数据辅助入河排污口排查工作.由于入河排污口地物目标较小,最初采用的是通过对航空相片目视解译识别出污染水体,再进一步在这些重点区域识别入河排污口[11-12].随着卫星遥感技术的发展,其影像空间、时间、光谱分辨率的不断提高,获取也越来越方便,中高分辨率的卫星遥感影像开始成为入河排污口排查工作重要的辅助数据源,如邬明权等[13]先是使用Landsat TM影像根据叶绿素a和总悬浮物浓度两项指标提取了渤海的重点污染区域,再使用空间分辨率为0.6 m的QuickBird卫星影像在这些重点区域对渤海陆源入海排污口进行了目视解译.虽然尺度较大的污染水体可以使用卫星遥感通过水环境指标进行(半)自动化的提取,但具体到尺度较小的排污口,识别方法仍主要是目视解译,需要大量的人工参与.受限于卫星重访周期、影像空间分辨率、排污口遥感自动识别方法的准确性等因素,卫星遥感监测只是人工实地排查的辅助手段,不适合作为一种单独的技术应用于业务化的入河排污口排查工作中,如:2010~2012年开展的第一次全国水利普查仍以人工实地调查为主. ...
... Common remote sensing data sources for monitoring outfalls into rivers
Table 1| 传感器 | 数据源 | 空间分辨率/m | 时间分辨率/d | 波段组成 | 幅宽/km | 应用方法 |
|---|
| 光学 | QuickBird | 0.65/2.6 | 1-3.5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 18 | 直接检测[13] |
| 光学 | GF-2 | 0.81/3.24 | 1-5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 45 | 直接检测[25] |
| 光学 | Landsat-5 TM | 30/120 | 16 | 7个波段,包括3个可见光波段、1个近红外波段、2个短波红外波段和1个热红外波段 | 185 | 间接检测[13] |
| 光学 | Landsat-8 OLI | 30/15 | 16 | 9个波段,包括1个海岸气溶胶波段、3个可见光波段、1个近红外波段、3个短波红外波段和1个全色波段 | 185 | 间接检测[20] |
| 光学 | Landsat-8 TIRS | 100 | 16 | 2个波段,包括2个热红外波段 | 185 | 间接检测[20] |
| 光学 | Terra ASTER | 15/30/90 | 16 | 15个波段,包括3个可见光波段、1个近红外波段、6个短波红外波段和5个热红外波段 | 60 | 间接检测[22] |
| 光学 | Aqua MODIS | 250/500/1 000 | 1-2 | 36个波段,其中21个波段位于0.4~3.0 μm,15个波段位于3~14.5 μm | 2 300 | 间接检测[20] |
| 光学 | SeaWiFS | 1 000/4 000 | 1 | 8个波段,1~6波段带宽20 nm,7~8波段带宽40 nm | 1 500/2 800 | 间接检测[18] |
| 雷达 | ERS-1/2 | 30 | 35 | SAR图像 | 100 | 间接检测[21] |
| 雷达 | Radarsat-1 | 30/100 | 24 | SAR图像 | 100/500 | 间接检测[21] |
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... [
13]
| 光学 | Landsat-8 OLI | 30/15 | 16 | 9个波段,包括1个海岸气溶胶波段、3个可见光波段、1个近红外波段、3个短波红外波段和1个全色波段 | 185 | 间接检测[20] |
| 光学 | Landsat-8 TIRS | 100 | 16 | 2个波段,包括2个热红外波段 | 185 | 间接检测[20] |
| 光学 | Terra ASTER | 15/30/90 | 16 | 15个波段,包括3个可见光波段、1个近红外波段、6个短波红外波段和5个热红外波段 | 60 | 间接检测[22] |
| 光学 | Aqua MODIS | 250/500/1 000 | 1-2 | 36个波段,其中21个波段位于0.4~3.0 μm,15个波段位于3~14.5 μm | 2 300 | 间接检测[20] |
| 光学 | SeaWiFS | 1 000/4 000 | 1 | 8个波段,1~6波段带宽20 nm,7~8波段带宽40 nm | 1 500/2 800 | 间接检测[18] |
| 雷达 | ERS-1/2 | 30 | 35 | SAR图像 | 100 | 间接检测[21] |
| 雷达 | Radarsat-1 | 30/100 | 24 | SAR图像 | 100/500 | 间接检测[21] |
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... 目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... 入河排污口是连结陆上污染源和排入水体的枢纽,为此可通过监测水质状况来间接实现排污口的识别.因此,可基于SAR、多(高)光谱影像进行水环境参数的反演,进而结合水体污染状况进行排污口的遥感监测.常用的水环境参数包括叶绿素a(Chlorophyll-a, Chl-a)、有色可溶性有机物(Colored Dissolved Organic Matter, CDOM)、悬浮物(Suspended Solids, SS)和温度(Temperature, T),反演方法一般可分为经验模型、半经验模型和生物光学模型3种[16].如Marmorino等[17]在CASI航空高光谱影像反演CDOM,结合机载红外相机测量水面温度T检测废水扩散范围,同时构建一个无量纲扩散指数实现排污口的监测.邬明权等[13]通过反演叶绿素a和总悬浮物浓度划定高污染区域,结合高分辨率QuickBird影像监测排污口.Nezlin等[18]利用OC4算法[19] 从SeaWiFS卫星影像反演叶绿素a浓度,同时使用AVHRR海面温度产品数据,研究了南加州湾的水华事件,间接发现入海排污口.Trinh等[20]使用Landsat-8 OLI和Aqua MODIS影像数据反演叶绿素a浓度研究废水扩散情况,结合Landsat-8 TIRS热红外数据反演海面温度辅助监测排污口.此外,排污口废水还会改变水面的粗糙度,DiGiacomo等[21]使用ERS-1/2和RadarSAT-1雷达数据研究了南加州湾的废水流,定性地得到了废水流区域SAR图像值更小的结论(废水中存在的油脂等物质使得其表面更为光滑,向后散射更小);Gierach等[22]使用多源数据,包括:EnviSAT-1 ASAR、Aqua MODIS和Terra ASTER,分别监测了污染水体的水面粗糙度、叶绿素a浓度和温度3个指标,间接地实现排污口监测. ...
渤海陆源入海排污口的多尺度遥感监测分析
5
2012
... 2000年前后,我国就开始使用遥感数据辅助入河排污口排查工作.由于入河排污口地物目标较小,最初采用的是通过对航空相片目视解译识别出污染水体,再进一步在这些重点区域识别入河排污口[11-12].随着卫星遥感技术的发展,其影像空间、时间、光谱分辨率的不断提高,获取也越来越方便,中高分辨率的卫星遥感影像开始成为入河排污口排查工作重要的辅助数据源,如邬明权等[13]先是使用Landsat TM影像根据叶绿素a和总悬浮物浓度两项指标提取了渤海的重点污染区域,再使用空间分辨率为0.6 m的QuickBird卫星影像在这些重点区域对渤海陆源入海排污口进行了目视解译.虽然尺度较大的污染水体可以使用卫星遥感通过水环境指标进行(半)自动化的提取,但具体到尺度较小的排污口,识别方法仍主要是目视解译,需要大量的人工参与.受限于卫星重访周期、影像空间分辨率、排污口遥感自动识别方法的准确性等因素,卫星遥感监测只是人工实地排查的辅助手段,不适合作为一种单独的技术应用于业务化的入河排污口排查工作中,如:2010~2012年开展的第一次全国水利普查仍以人工实地调查为主. ...
... Common remote sensing data sources for monitoring outfalls into rivers
Table 1| 传感器 | 数据源 | 空间分辨率/m | 时间分辨率/d | 波段组成 | 幅宽/km | 应用方法 |
|---|
| 光学 | QuickBird | 0.65/2.6 | 1-3.5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 18 | 直接检测[13] |
| 光学 | GF-2 | 0.81/3.24 | 1-5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 45 | 直接检测[25] |
| 光学 | Landsat-5 TM | 30/120 | 16 | 7个波段,包括3个可见光波段、1个近红外波段、2个短波红外波段和1个热红外波段 | 185 | 间接检测[13] |
| 光学 | Landsat-8 OLI | 30/15 | 16 | 9个波段,包括1个海岸气溶胶波段、3个可见光波段、1个近红外波段、3个短波红外波段和1个全色波段 | 185 | 间接检测[20] |
| 光学 | Landsat-8 TIRS | 100 | 16 | 2个波段,包括2个热红外波段 | 185 | 间接检测[20] |
| 光学 | Terra ASTER | 15/30/90 | 16 | 15个波段,包括3个可见光波段、1个近红外波段、6个短波红外波段和5个热红外波段 | 60 | 间接检测[22] |
| 光学 | Aqua MODIS | 250/500/1 000 | 1-2 | 36个波段,其中21个波段位于0.4~3.0 μm,15个波段位于3~14.5 μm | 2 300 | 间接检测[20] |
| 光学 | SeaWiFS | 1 000/4 000 | 1 | 8个波段,1~6波段带宽20 nm,7~8波段带宽40 nm | 1 500/2 800 | 间接检测[18] |
| 雷达 | ERS-1/2 | 30 | 35 | SAR图像 | 100 | 间接检测[21] |
| 雷达 | Radarsat-1 | 30/100 | 24 | SAR图像 | 100/500 | 间接检测[21] |
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... [
13]
| 光学 | Landsat-8 OLI | 30/15 | 16 | 9个波段,包括1个海岸气溶胶波段、3个可见光波段、1个近红外波段、3个短波红外波段和1个全色波段 | 185 | 间接检测[20] |
| 光学 | Landsat-8 TIRS | 100 | 16 | 2个波段,包括2个热红外波段 | 185 | 间接检测[20] |
| 光学 | Terra ASTER | 15/30/90 | 16 | 15个波段,包括3个可见光波段、1个近红外波段、6个短波红外波段和5个热红外波段 | 60 | 间接检测[22] |
| 光学 | Aqua MODIS | 250/500/1 000 | 1-2 | 36个波段,其中21个波段位于0.4~3.0 μm,15个波段位于3~14.5 μm | 2 300 | 间接检测[20] |
| 光学 | SeaWiFS | 1 000/4 000 | 1 | 8个波段,1~6波段带宽20 nm,7~8波段带宽40 nm | 1 500/2 800 | 间接检测[18] |
| 雷达 | ERS-1/2 | 30 | 35 | SAR图像 | 100 | 间接检测[21] |
| 雷达 | Radarsat-1 | 30/100 | 24 | SAR图像 | 100/500 | 间接检测[21] |
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... 目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... 入河排污口是连结陆上污染源和排入水体的枢纽,为此可通过监测水质状况来间接实现排污口的识别.因此,可基于SAR、多(高)光谱影像进行水环境参数的反演,进而结合水体污染状况进行排污口的遥感监测.常用的水环境参数包括叶绿素a(Chlorophyll-a, Chl-a)、有色可溶性有机物(Colored Dissolved Organic Matter, CDOM)、悬浮物(Suspended Solids, SS)和温度(Temperature, T),反演方法一般可分为经验模型、半经验模型和生物光学模型3种[16].如Marmorino等[17]在CASI航空高光谱影像反演CDOM,结合机载红外相机测量水面温度T检测废水扩散范围,同时构建一个无量纲扩散指数实现排污口的监测.邬明权等[13]通过反演叶绿素a和总悬浮物浓度划定高污染区域,结合高分辨率QuickBird影像监测排污口.Nezlin等[18]利用OC4算法[19] 从SeaWiFS卫星影像反演叶绿素a浓度,同时使用AVHRR海面温度产品数据,研究了南加州湾的水华事件,间接发现入海排污口.Trinh等[20]使用Landsat-8 OLI和Aqua MODIS影像数据反演叶绿素a浓度研究废水扩散情况,结合Landsat-8 TIRS热红外数据反演海面温度辅助监测排污口.此外,排污口废水还会改变水面的粗糙度,DiGiacomo等[21]使用ERS-1/2和RadarSAT-1雷达数据研究了南加州湾的废水流,定性地得到了废水流区域SAR图像值更小的结论(废水中存在的油脂等物质使得其表面更为光滑,向后散射更小);Gierach等[22]使用多源数据,包括:EnviSAT-1 ASAR、Aqua MODIS和Terra ASTER,分别监测了污染水体的水面粗糙度、叶绿素a浓度和温度3个指标,间接地实现排污口监测. ...
Outfall inventory using air photo interpretation
1
1972
... 目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
Remote sensing of coastal discharge sites using SPOT-simulation data
1
1986
... 目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
基于环境一号卫星的内陆水体水质多光谱遥感监测
1
2010
... 入河排污口是连结陆上污染源和排入水体的枢纽,为此可通过监测水质状况来间接实现排污口的识别.因此,可基于SAR、多(高)光谱影像进行水环境参数的反演,进而结合水体污染状况进行排污口的遥感监测.常用的水环境参数包括叶绿素a(Chlorophyll-a, Chl-a)、有色可溶性有机物(Colored Dissolved Organic Matter, CDOM)、悬浮物(Suspended Solids, SS)和温度(Temperature, T),反演方法一般可分为经验模型、半经验模型和生物光学模型3种[16].如Marmorino等[17]在CASI航空高光谱影像反演CDOM,结合机载红外相机测量水面温度T检测废水扩散范围,同时构建一个无量纲扩散指数实现排污口的监测.邬明权等[13]通过反演叶绿素a和总悬浮物浓度划定高污染区域,结合高分辨率QuickBird影像监测排污口.Nezlin等[18]利用OC4算法[19] 从SeaWiFS卫星影像反演叶绿素a浓度,同时使用AVHRR海面温度产品数据,研究了南加州湾的水华事件,间接发现入海排污口.Trinh等[20]使用Landsat-8 OLI和Aqua MODIS影像数据反演叶绿素a浓度研究废水扩散情况,结合Landsat-8 TIRS热红外数据反演海面温度辅助监测排污口.此外,排污口废水还会改变水面的粗糙度,DiGiacomo等[21]使用ERS-1/2和RadarSAT-1雷达数据研究了南加州湾的废水流,定性地得到了废水流区域SAR图像值更小的结论(废水中存在的油脂等物质使得其表面更为光滑,向后散射更小);Gierach等[22]使用多源数据,包括:EnviSAT-1 ASAR、Aqua MODIS和Terra ASTER,分别监测了污染水体的水面粗糙度、叶绿素a浓度和温度3个指标,间接地实现排污口监测. ...
基于环境一号卫星的内陆水体水质多光谱遥感监测
1
2010
... 入河排污口是连结陆上污染源和排入水体的枢纽,为此可通过监测水质状况来间接实现排污口的识别.因此,可基于SAR、多(高)光谱影像进行水环境参数的反演,进而结合水体污染状况进行排污口的遥感监测.常用的水环境参数包括叶绿素a(Chlorophyll-a, Chl-a)、有色可溶性有机物(Colored Dissolved Organic Matter, CDOM)、悬浮物(Suspended Solids, SS)和温度(Temperature, T),反演方法一般可分为经验模型、半经验模型和生物光学模型3种[16].如Marmorino等[17]在CASI航空高光谱影像反演CDOM,结合机载红外相机测量水面温度T检测废水扩散范围,同时构建一个无量纲扩散指数实现排污口的监测.邬明权等[13]通过反演叶绿素a和总悬浮物浓度划定高污染区域,结合高分辨率QuickBird影像监测排污口.Nezlin等[18]利用OC4算法[19] 从SeaWiFS卫星影像反演叶绿素a浓度,同时使用AVHRR海面温度产品数据,研究了南加州湾的水华事件,间接发现入海排污口.Trinh等[20]使用Landsat-8 OLI和Aqua MODIS影像数据反演叶绿素a浓度研究废水扩散情况,结合Landsat-8 TIRS热红外数据反演海面温度辅助监测排污口.此外,排污口废水还会改变水面的粗糙度,DiGiacomo等[21]使用ERS-1/2和RadarSAT-1雷达数据研究了南加州湾的废水流,定性地得到了废水流区域SAR图像值更小的结论(废水中存在的油脂等物质使得其表面更为光滑,向后散射更小);Gierach等[22]使用多源数据,包括:EnviSAT-1 ASAR、Aqua MODIS和Terra ASTER,分别监测了污染水体的水面粗糙度、叶绿素a浓度和温度3个指标,间接地实现排污口监测. ...
Detection of a buoyant coastal wastewater discharge using airborne hyperspectral and infrared imagery
1
2010
... 入河排污口是连结陆上污染源和排入水体的枢纽,为此可通过监测水质状况来间接实现排污口的识别.因此,可基于SAR、多(高)光谱影像进行水环境参数的反演,进而结合水体污染状况进行排污口的遥感监测.常用的水环境参数包括叶绿素a(Chlorophyll-a, Chl-a)、有色可溶性有机物(Colored Dissolved Organic Matter, CDOM)、悬浮物(Suspended Solids, SS)和温度(Temperature, T),反演方法一般可分为经验模型、半经验模型和生物光学模型3种[16].如Marmorino等[17]在CASI航空高光谱影像反演CDOM,结合机载红外相机测量水面温度T检测废水扩散范围,同时构建一个无量纲扩散指数实现排污口的监测.邬明权等[13]通过反演叶绿素a和总悬浮物浓度划定高污染区域,结合高分辨率QuickBird影像监测排污口.Nezlin等[18]利用OC4算法[19] 从SeaWiFS卫星影像反演叶绿素a浓度,同时使用AVHRR海面温度产品数据,研究了南加州湾的水华事件,间接发现入海排污口.Trinh等[20]使用Landsat-8 OLI和Aqua MODIS影像数据反演叶绿素a浓度研究废水扩散情况,结合Landsat-8 TIRS热红外数据反演海面温度辅助监测排污口.此外,排污口废水还会改变水面的粗糙度,DiGiacomo等[21]使用ERS-1/2和RadarSAT-1雷达数据研究了南加州湾的废水流,定性地得到了废水流区域SAR图像值更小的结论(废水中存在的油脂等物质使得其表面更为光滑,向后散射更小);Gierach等[22]使用多源数据,包括:EnviSAT-1 ASAR、Aqua MODIS和Terra ASTER,分别监测了污染水体的水面粗糙度、叶绿素a浓度和温度3个指标,间接地实现排污口监测. ...
Phytoplankton blooms detected by SeaWiFS along the central and southern California coast
2
2012
... Common remote sensing data sources for monitoring outfalls into rivers
Table 1| 传感器 | 数据源 | 空间分辨率/m | 时间分辨率/d | 波段组成 | 幅宽/km | 应用方法 |
|---|
| 光学 | QuickBird | 0.65/2.6 | 1-3.5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 18 | 直接检测[13] |
| 光学 | GF-2 | 0.81/3.24 | 1-5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 45 | 直接检测[25] |
| 光学 | Landsat-5 TM | 30/120 | 16 | 7个波段,包括3个可见光波段、1个近红外波段、2个短波红外波段和1个热红外波段 | 185 | 间接检测[13] |
| 光学 | Landsat-8 OLI | 30/15 | 16 | 9个波段,包括1个海岸气溶胶波段、3个可见光波段、1个近红外波段、3个短波红外波段和1个全色波段 | 185 | 间接检测[20] |
| 光学 | Landsat-8 TIRS | 100 | 16 | 2个波段,包括2个热红外波段 | 185 | 间接检测[20] |
| 光学 | Terra ASTER | 15/30/90 | 16 | 15个波段,包括3个可见光波段、1个近红外波段、6个短波红外波段和5个热红外波段 | 60 | 间接检测[22] |
| 光学 | Aqua MODIS | 250/500/1 000 | 1-2 | 36个波段,其中21个波段位于0.4~3.0 μm,15个波段位于3~14.5 μm | 2 300 | 间接检测[20] |
| 光学 | SeaWiFS | 1 000/4 000 | 1 | 8个波段,1~6波段带宽20 nm,7~8波段带宽40 nm | 1 500/2 800 | 间接检测[18] |
| 雷达 | ERS-1/2 | 30 | 35 | SAR图像 | 100 | 间接检测[21] |
| 雷达 | Radarsat-1 | 30/100 | 24 | SAR图像 | 100/500 | 间接检测[21] |
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... 入河排污口是连结陆上污染源和排入水体的枢纽,为此可通过监测水质状况来间接实现排污口的识别.因此,可基于SAR、多(高)光谱影像进行水环境参数的反演,进而结合水体污染状况进行排污口的遥感监测.常用的水环境参数包括叶绿素a(Chlorophyll-a, Chl-a)、有色可溶性有机物(Colored Dissolved Organic Matter, CDOM)、悬浮物(Suspended Solids, SS)和温度(Temperature, T),反演方法一般可分为经验模型、半经验模型和生物光学模型3种[16].如Marmorino等[17]在CASI航空高光谱影像反演CDOM,结合机载红外相机测量水面温度T检测废水扩散范围,同时构建一个无量纲扩散指数实现排污口的监测.邬明权等[13]通过反演叶绿素a和总悬浮物浓度划定高污染区域,结合高分辨率QuickBird影像监测排污口.Nezlin等[18]利用OC4算法[19] 从SeaWiFS卫星影像反演叶绿素a浓度,同时使用AVHRR海面温度产品数据,研究了南加州湾的水华事件,间接发现入海排污口.Trinh等[20]使用Landsat-8 OLI和Aqua MODIS影像数据反演叶绿素a浓度研究废水扩散情况,结合Landsat-8 TIRS热红外数据反演海面温度辅助监测排污口.此外,排污口废水还会改变水面的粗糙度,DiGiacomo等[21]使用ERS-1/2和RadarSAT-1雷达数据研究了南加州湾的废水流,定性地得到了废水流区域SAR图像值更小的结论(废水中存在的油脂等物质使得其表面更为光滑,向后散射更小);Gierach等[22]使用多源数据,包括:EnviSAT-1 ASAR、Aqua MODIS和Terra ASTER,分别监测了污染水体的水面粗糙度、叶绿素a浓度和温度3个指标,间接地实现排污口监测. ...
Ocean color chlorophyll algorithms for SeaWiFS
1
1998
... 入河排污口是连结陆上污染源和排入水体的枢纽,为此可通过监测水质状况来间接实现排污口的识别.因此,可基于SAR、多(高)光谱影像进行水环境参数的反演,进而结合水体污染状况进行排污口的遥感监测.常用的水环境参数包括叶绿素a(Chlorophyll-a, Chl-a)、有色可溶性有机物(Colored Dissolved Organic Matter, CDOM)、悬浮物(Suspended Solids, SS)和温度(Temperature, T),反演方法一般可分为经验模型、半经验模型和生物光学模型3种[16].如Marmorino等[17]在CASI航空高光谱影像反演CDOM,结合机载红外相机测量水面温度T检测废水扩散范围,同时构建一个无量纲扩散指数实现排污口的监测.邬明权等[13]通过反演叶绿素a和总悬浮物浓度划定高污染区域,结合高分辨率QuickBird影像监测排污口.Nezlin等[18]利用OC4算法[19] 从SeaWiFS卫星影像反演叶绿素a浓度,同时使用AVHRR海面温度产品数据,研究了南加州湾的水华事件,间接发现入海排污口.Trinh等[20]使用Landsat-8 OLI和Aqua MODIS影像数据反演叶绿素a浓度研究废水扩散情况,结合Landsat-8 TIRS热红外数据反演海面温度辅助监测排污口.此外,排污口废水还会改变水面的粗糙度,DiGiacomo等[21]使用ERS-1/2和RadarSAT-1雷达数据研究了南加州湾的废水流,定性地得到了废水流区域SAR图像值更小的结论(废水中存在的油脂等物质使得其表面更为光滑,向后散射更小);Gierach等[22]使用多源数据,包括:EnviSAT-1 ASAR、Aqua MODIS和Terra ASTER,分别监测了污染水体的水面粗糙度、叶绿素a浓度和温度3个指标,间接地实现排污口监测. ...
Application of Landsat 8 for monitoring impacts of wastewater discharge on coastal water quality
4
2017
... Common remote sensing data sources for monitoring outfalls into rivers
Table 1| 传感器 | 数据源 | 空间分辨率/m | 时间分辨率/d | 波段组成 | 幅宽/km | 应用方法 |
|---|
| 光学 | QuickBird | 0.65/2.6 | 1-3.5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 18 | 直接检测[13] |
| 光学 | GF-2 | 0.81/3.24 | 1-5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 45 | 直接检测[25] |
| 光学 | Landsat-5 TM | 30/120 | 16 | 7个波段,包括3个可见光波段、1个近红外波段、2个短波红外波段和1个热红外波段 | 185 | 间接检测[13] |
| 光学 | Landsat-8 OLI | 30/15 | 16 | 9个波段,包括1个海岸气溶胶波段、3个可见光波段、1个近红外波段、3个短波红外波段和1个全色波段 | 185 | 间接检测[20] |
| 光学 | Landsat-8 TIRS | 100 | 16 | 2个波段,包括2个热红外波段 | 185 | 间接检测[20] |
| 光学 | Terra ASTER | 15/30/90 | 16 | 15个波段,包括3个可见光波段、1个近红外波段、6个短波红外波段和5个热红外波段 | 60 | 间接检测[22] |
| 光学 | Aqua MODIS | 250/500/1 000 | 1-2 | 36个波段,其中21个波段位于0.4~3.0 μm,15个波段位于3~14.5 μm | 2 300 | 间接检测[20] |
| 光学 | SeaWiFS | 1 000/4 000 | 1 | 8个波段,1~6波段带宽20 nm,7~8波段带宽40 nm | 1 500/2 800 | 间接检测[18] |
| 雷达 | ERS-1/2 | 30 | 35 | SAR图像 | 100 | 间接检测[21] |
| 雷达 | Radarsat-1 | 30/100 | 24 | SAR图像 | 100/500 | 间接检测[21] |
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... [
20]
| 光学 | Terra ASTER | 15/30/90 | 16 | 15个波段,包括3个可见光波段、1个近红外波段、6个短波红外波段和5个热红外波段 | 60 | 间接检测[22] |
| 光学 | Aqua MODIS | 250/500/1 000 | 1-2 | 36个波段,其中21个波段位于0.4~3.0 μm,15个波段位于3~14.5 μm | 2 300 | 间接检测[20] |
| 光学 | SeaWiFS | 1 000/4 000 | 1 | 8个波段,1~6波段带宽20 nm,7~8波段带宽40 nm | 1 500/2 800 | 间接检测[18] |
| 雷达 | ERS-1/2 | 30 | 35 | SAR图像 | 100 | 间接检测[21] |
| 雷达 | Radarsat-1 | 30/100 | 24 | SAR图像 | 100/500 | 间接检测[21] |
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... [
20]
| 光学 | SeaWiFS | 1 000/4 000 | 1 | 8个波段,1~6波段带宽20 nm,7~8波段带宽40 nm | 1 500/2 800 | 间接检测[18] |
| 雷达 | ERS-1/2 | 30 | 35 | SAR图像 | 100 | 间接检测[21] |
| 雷达 | Radarsat-1 | 30/100 | 24 | SAR图像 | 100/500 | 间接检测[21] |
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... 入河排污口是连结陆上污染源和排入水体的枢纽,为此可通过监测水质状况来间接实现排污口的识别.因此,可基于SAR、多(高)光谱影像进行水环境参数的反演,进而结合水体污染状况进行排污口的遥感监测.常用的水环境参数包括叶绿素a(Chlorophyll-a, Chl-a)、有色可溶性有机物(Colored Dissolved Organic Matter, CDOM)、悬浮物(Suspended Solids, SS)和温度(Temperature, T),反演方法一般可分为经验模型、半经验模型和生物光学模型3种[16].如Marmorino等[17]在CASI航空高光谱影像反演CDOM,结合机载红外相机测量水面温度T检测废水扩散范围,同时构建一个无量纲扩散指数实现排污口的监测.邬明权等[13]通过反演叶绿素a和总悬浮物浓度划定高污染区域,结合高分辨率QuickBird影像监测排污口.Nezlin等[18]利用OC4算法[19] 从SeaWiFS卫星影像反演叶绿素a浓度,同时使用AVHRR海面温度产品数据,研究了南加州湾的水华事件,间接发现入海排污口.Trinh等[20]使用Landsat-8 OLI和Aqua MODIS影像数据反演叶绿素a浓度研究废水扩散情况,结合Landsat-8 TIRS热红外数据反演海面温度辅助监测排污口.此外,排污口废水还会改变水面的粗糙度,DiGiacomo等[21]使用ERS-1/2和RadarSAT-1雷达数据研究了南加州湾的废水流,定性地得到了废水流区域SAR图像值更小的结论(废水中存在的油脂等物质使得其表面更为光滑,向后散射更小);Gierach等[22]使用多源数据,包括:EnviSAT-1 ASAR、Aqua MODIS和Terra ASTER,分别监测了污染水体的水面粗糙度、叶绿素a浓度和温度3个指标,间接地实现排污口监测. ...
Coastal pollution hazards in southern California observed by SAR imagery: stormwater plumes, wastewater plumes, and natural hydrocarbon seeps
3
2004
... Common remote sensing data sources for monitoring outfalls into rivers
Table 1| 传感器 | 数据源 | 空间分辨率/m | 时间分辨率/d | 波段组成 | 幅宽/km | 应用方法 |
|---|
| 光学 | QuickBird | 0.65/2.6 | 1-3.5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 18 | 直接检测[13] |
| 光学 | GF-2 | 0.81/3.24 | 1-5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 45 | 直接检测[25] |
| 光学 | Landsat-5 TM | 30/120 | 16 | 7个波段,包括3个可见光波段、1个近红外波段、2个短波红外波段和1个热红外波段 | 185 | 间接检测[13] |
| 光学 | Landsat-8 OLI | 30/15 | 16 | 9个波段,包括1个海岸气溶胶波段、3个可见光波段、1个近红外波段、3个短波红外波段和1个全色波段 | 185 | 间接检测[20] |
| 光学 | Landsat-8 TIRS | 100 | 16 | 2个波段,包括2个热红外波段 | 185 | 间接检测[20] |
| 光学 | Terra ASTER | 15/30/90 | 16 | 15个波段,包括3个可见光波段、1个近红外波段、6个短波红外波段和5个热红外波段 | 60 | 间接检测[22] |
| 光学 | Aqua MODIS | 250/500/1 000 | 1-2 | 36个波段,其中21个波段位于0.4~3.0 μm,15个波段位于3~14.5 μm | 2 300 | 间接检测[20] |
| 光学 | SeaWiFS | 1 000/4 000 | 1 | 8个波段,1~6波段带宽20 nm,7~8波段带宽40 nm | 1 500/2 800 | 间接检测[18] |
| 雷达 | ERS-1/2 | 30 | 35 | SAR图像 | 100 | 间接检测[21] |
| 雷达 | Radarsat-1 | 30/100 | 24 | SAR图像 | 100/500 | 间接检测[21] |
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... [
21]
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... 入河排污口是连结陆上污染源和排入水体的枢纽,为此可通过监测水质状况来间接实现排污口的识别.因此,可基于SAR、多(高)光谱影像进行水环境参数的反演,进而结合水体污染状况进行排污口的遥感监测.常用的水环境参数包括叶绿素a(Chlorophyll-a, Chl-a)、有色可溶性有机物(Colored Dissolved Organic Matter, CDOM)、悬浮物(Suspended Solids, SS)和温度(Temperature, T),反演方法一般可分为经验模型、半经验模型和生物光学模型3种[16].如Marmorino等[17]在CASI航空高光谱影像反演CDOM,结合机载红外相机测量水面温度T检测废水扩散范围,同时构建一个无量纲扩散指数实现排污口的监测.邬明权等[13]通过反演叶绿素a和总悬浮物浓度划定高污染区域,结合高分辨率QuickBird影像监测排污口.Nezlin等[18]利用OC4算法[19] 从SeaWiFS卫星影像反演叶绿素a浓度,同时使用AVHRR海面温度产品数据,研究了南加州湾的水华事件,间接发现入海排污口.Trinh等[20]使用Landsat-8 OLI和Aqua MODIS影像数据反演叶绿素a浓度研究废水扩散情况,结合Landsat-8 TIRS热红外数据反演海面温度辅助监测排污口.此外,排污口废水还会改变水面的粗糙度,DiGiacomo等[21]使用ERS-1/2和RadarSAT-1雷达数据研究了南加州湾的废水流,定性地得到了废水流区域SAR图像值更小的结论(废水中存在的油脂等物质使得其表面更为光滑,向后散射更小);Gierach等[22]使用多源数据,包括:EnviSAT-1 ASAR、Aqua MODIS和Terra ASTER,分别监测了污染水体的水面粗糙度、叶绿素a浓度和温度3个指标,间接地实现排污口监测. ...
Satellite detection of wastewater diversion plumes in Southern California
4
2017
... Common remote sensing data sources for monitoring outfalls into rivers
Table 1| 传感器 | 数据源 | 空间分辨率/m | 时间分辨率/d | 波段组成 | 幅宽/km | 应用方法 |
|---|
| 光学 | QuickBird | 0.65/2.6 | 1-3.5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 18 | 直接检测[13] |
| 光学 | GF-2 | 0.81/3.24 | 1-5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 45 | 直接检测[25] |
| 光学 | Landsat-5 TM | 30/120 | 16 | 7个波段,包括3个可见光波段、1个近红外波段、2个短波红外波段和1个热红外波段 | 185 | 间接检测[13] |
| 光学 | Landsat-8 OLI | 30/15 | 16 | 9个波段,包括1个海岸气溶胶波段、3个可见光波段、1个近红外波段、3个短波红外波段和1个全色波段 | 185 | 间接检测[20] |
| 光学 | Landsat-8 TIRS | 100 | 16 | 2个波段,包括2个热红外波段 | 185 | 间接检测[20] |
| 光学 | Terra ASTER | 15/30/90 | 16 | 15个波段,包括3个可见光波段、1个近红外波段、6个短波红外波段和5个热红外波段 | 60 | 间接检测[22] |
| 光学 | Aqua MODIS | 250/500/1 000 | 1-2 | 36个波段,其中21个波段位于0.4~3.0 μm,15个波段位于3~14.5 μm | 2 300 | 间接检测[20] |
| 光学 | SeaWiFS | 1 000/4 000 | 1 | 8个波段,1~6波段带宽20 nm,7~8波段带宽40 nm | 1 500/2 800 | 间接检测[18] |
| 雷达 | ERS-1/2 | 30 | 35 | SAR图像 | 100 | 间接检测[21] |
| 雷达 | Radarsat-1 | 30/100 | 24 | SAR图像 | 100/500 | 间接检测[21] |
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... [
22]
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... 入河排污口是连结陆上污染源和排入水体的枢纽,为此可通过监测水质状况来间接实现排污口的识别.因此,可基于SAR、多(高)光谱影像进行水环境参数的反演,进而结合水体污染状况进行排污口的遥感监测.常用的水环境参数包括叶绿素a(Chlorophyll-a, Chl-a)、有色可溶性有机物(Colored Dissolved Organic Matter, CDOM)、悬浮物(Suspended Solids, SS)和温度(Temperature, T),反演方法一般可分为经验模型、半经验模型和生物光学模型3种[16].如Marmorino等[17]在CASI航空高光谱影像反演CDOM,结合机载红外相机测量水面温度T检测废水扩散范围,同时构建一个无量纲扩散指数实现排污口的监测.邬明权等[13]通过反演叶绿素a和总悬浮物浓度划定高污染区域,结合高分辨率QuickBird影像监测排污口.Nezlin等[18]利用OC4算法[19] 从SeaWiFS卫星影像反演叶绿素a浓度,同时使用AVHRR海面温度产品数据,研究了南加州湾的水华事件,间接发现入海排污口.Trinh等[20]使用Landsat-8 OLI和Aqua MODIS影像数据反演叶绿素a浓度研究废水扩散情况,结合Landsat-8 TIRS热红外数据反演海面温度辅助监测排污口.此外,排污口废水还会改变水面的粗糙度,DiGiacomo等[21]使用ERS-1/2和RadarSAT-1雷达数据研究了南加州湾的废水流,定性地得到了废水流区域SAR图像值更小的结论(废水中存在的油脂等物质使得其表面更为光滑,向后散射更小);Gierach等[22]使用多源数据,包括:EnviSAT-1 ASAR、Aqua MODIS和Terra ASTER,分别监测了污染水体的水面粗糙度、叶绿素a浓度和温度3个指标,间接地实现排污口监测. ...
... 采用水环境参数反演的排污口监测方法主要依赖于排污口周边纳污水体与正常水体之间的差异,而这种差异需要达到一定阈值才能实现排污口的识别,如叶绿素a浓度至少相差1 mg/m3、温度至少相差0.5 ℃才能区分污染水体和周围水体,水面风速须在3 m/s到8 m/s之间才能使用SAR图像区分污染水体[22].为此,对于阶段性排污或水体枯竭的排污口容易造成遗漏.此外,水环境参数的反演精度也是制约其实用性的一个重要因素. ...
Land use/landcover in view of earth observation: data sources, input dimensions, and classifiers—a review of the state of the art
1
2021
... 排污口遥感检测可以归结为传统的遥感影像地物分类问题,尽管基于高分辨率、高光谱等遥感影像的地物分类算法已相对成熟[23],但以排污口作为一个单独的地类进行研究还处于起步阶段.Ammenberg等[24]获取了大量的实地水体光谱数据,在机载高光谱CASI数据上应用光谱角分类SAM算法对水体进行分类,得到污染水体,从而进一步解译排污口.SAM算法将影像上每个点的光谱信息视作向量,计算它与参考实地水体的光谱数据的夹角,将其归类到夹角最小的一类中.Zhang等[25]基于机器学习算法,使用光谱平均值、比率、亮度、面积等特征,在0.8m分辨率的高分2号影像上对滦河流域的排污口进行了检测.然而,由于排污口相对于中低分辨率影像目标较小,而对于高、超高分辨率影像而言,排污口内部像元的光谱特征差异较大,属于典型的混合地物类型,直接采用传统遥感地物分类方法进行入河排污口的识别还存在一定的难度.因此,有必要引入更加强大的基于深度学习的目标检测算法实现入河排污口的遥感影像自动识别. ...
Industrial plume detection in hyperspectral remote sensing data
1
2005
... 排污口遥感检测可以归结为传统的遥感影像地物分类问题,尽管基于高分辨率、高光谱等遥感影像的地物分类算法已相对成熟[23],但以排污口作为一个单独的地类进行研究还处于起步阶段.Ammenberg等[24]获取了大量的实地水体光谱数据,在机载高光谱CASI数据上应用光谱角分类SAM算法对水体进行分类,得到污染水体,从而进一步解译排污口.SAM算法将影像上每个点的光谱信息视作向量,计算它与参考实地水体的光谱数据的夹角,将其归类到夹角最小的一类中.Zhang等[25]基于机器学习算法,使用光谱平均值、比率、亮度、面积等特征,在0.8m分辨率的高分2号影像上对滦河流域的排污口进行了检测.然而,由于排污口相对于中低分辨率影像目标较小,而对于高、超高分辨率影像而言,排污口内部像元的光谱特征差异较大,属于典型的混合地物类型,直接采用传统遥感地物分类方法进行入河排污口的识别还存在一定的难度.因此,有必要引入更加强大的基于深度学习的目标检测算法实现入河排污口的遥感影像自动识别. ...
Novel method for industrial sewage outfall detection: Water pollution monitoring based on web crawler and remote sensing interpretation techniques
2
2021
... Common remote sensing data sources for monitoring outfalls into rivers
Table 1| 传感器 | 数据源 | 空间分辨率/m | 时间分辨率/d | 波段组成 | 幅宽/km | 应用方法 |
|---|
| 光学 | QuickBird | 0.65/2.6 | 1-3.5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 18 | 直接检测[13] |
| 光学 | GF-2 | 0.81/3.24 | 1-5 | 5个波段,包括3个可见光波段、1个近红外波段和1个全色波段 | 45 | 直接检测[25] |
| 光学 | Landsat-5 TM | 30/120 | 16 | 7个波段,包括3个可见光波段、1个近红外波段、2个短波红外波段和1个热红外波段 | 185 | 间接检测[13] |
| 光学 | Landsat-8 OLI | 30/15 | 16 | 9个波段,包括1个海岸气溶胶波段、3个可见光波段、1个近红外波段、3个短波红外波段和1个全色波段 | 185 | 间接检测[20] |
| 光学 | Landsat-8 TIRS | 100 | 16 | 2个波段,包括2个热红外波段 | 185 | 间接检测[20] |
| 光学 | Terra ASTER | 15/30/90 | 16 | 15个波段,包括3个可见光波段、1个近红外波段、6个短波红外波段和5个热红外波段 | 60 | 间接检测[22] |
| 光学 | Aqua MODIS | 250/500/1 000 | 1-2 | 36个波段,其中21个波段位于0.4~3.0 μm,15个波段位于3~14.5 μm | 2 300 | 间接检测[20] |
| 光学 | SeaWiFS | 1 000/4 000 | 1 | 8个波段,1~6波段带宽20 nm,7~8波段带宽40 nm | 1 500/2 800 | 间接检测[18] |
| 雷达 | ERS-1/2 | 30 | 35 | SAR图像 | 100 | 间接检测[21] |
| 雷达 | Radarsat-1 | 30/100 | 24 | SAR图像 | 100/500 | 间接检测[21] |
| 雷达 | Enfisat-1 ASAR | 30 | 30 | SAR图像 | 100 | 间接检测[22] |
3.1 目视解译目视解译是遥感地物识别的常规方法,也是现阶段入河排污口遥感识别的主要方式.入河排污口目视解译逐渐形成图像预处理、建立解译标志、特征判读和质量控制的标准化流程.其中解译标志特征通常包括颜色、透明度、形状结构、纹理、周围环境等.如Piech等[14]使用彩色和彩色红外影像,排查了美国俄亥俄州一段河流上的排污口,经过实地调查发现目视解译结果只遗漏了1个被植物遮挡的排污口;Davies等[15]使用SPOT-simulation数据目视解译出废水流扩散范围,并进一步检测出单个排放源位置;邬明权等[13]使用空间分辨率为0.6 m的QuickBird卫星影像对渤海陆源入海排污口进行了目视解译,排污口位置解译正确率超过90%.近年来生态环保部门开展的长江、黄河、渤海等区域入河排污口排查工作都是以无人机影像目视解译为主.为此,由生态环境部卫星环境应用中心于2021年组织编制了《入河(海)排污口排查整治无人机遥感影像解译技术规范》(征求意见稿),首次对实际生态环境监测业务中开展的入河(海)排污口无人机遥感影像解译提供了明确的技术规范.尽管目视解译方法简单、精度较高,但其容易受植被等物体遮挡的约束,同时解译标志和特征判读主要依赖专家和解译人员的经验,此外最重要的是需要大量的人力参与,降低了监管工作的时效性. ...
... 排污口遥感检测可以归结为传统的遥感影像地物分类问题,尽管基于高分辨率、高光谱等遥感影像的地物分类算法已相对成熟[23],但以排污口作为一个单独的地类进行研究还处于起步阶段.Ammenberg等[24]获取了大量的实地水体光谱数据,在机载高光谱CASI数据上应用光谱角分类SAM算法对水体进行分类,得到污染水体,从而进一步解译排污口.SAM算法将影像上每个点的光谱信息视作向量,计算它与参考实地水体的光谱数据的夹角,将其归类到夹角最小的一类中.Zhang等[25]基于机器学习算法,使用光谱平均值、比率、亮度、面积等特征,在0.8m分辨率的高分2号影像上对滦河流域的排污口进行了检测.然而,由于排污口相对于中低分辨率影像目标较小,而对于高、超高分辨率影像而言,排污口内部像元的光谱特征差异较大,属于典型的混合地物类型,直接采用传统遥感地物分类方法进行入河排污口的识别还存在一定的难度.因此,有必要引入更加强大的基于深度学习的目标检测算法实现入河排污口的遥感影像自动识别. ...
利用无人机开展入河排污口清查的思路与建议
3
2018
... 入河排污口体积小、空间分布稀疏且不均,并且可能存在故意遮挡等问题[26],这对利用卫星遥感进行入河排污口排查而言是一项巨大的挑战.机载遥感因具备高空间和时间分辨率的特点,而具备一定的入河排污口排查的能力.近年来,随着无人机技术快速发展及设备成本不断降低,无人机以其灵活、低成本、数据实时采集能力强等优点,成为入河排污口排查的重要手段[27].然而,目前入河排污口无人机遥感识别仍是以目视解译为主[26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
... [26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
... [26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
利用无人机开展入河排污口清查的思路与建议
3
2018
... 入河排污口体积小、空间分布稀疏且不均,并且可能存在故意遮挡等问题[26],这对利用卫星遥感进行入河排污口排查而言是一项巨大的挑战.机载遥感因具备高空间和时间分辨率的特点,而具备一定的入河排污口排查的能力.近年来,随着无人机技术快速发展及设备成本不断降低,无人机以其灵活、低成本、数据实时采集能力强等优点,成为入河排污口排查的重要手段[27].然而,目前入河排污口无人机遥感识别仍是以目视解译为主[26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
... [26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
... [26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
彻查长江排污口 无人机放大招——访卫星环境应用中心航空遥感部副主任杨海军
1
2019
... 入河排污口体积小、空间分布稀疏且不均,并且可能存在故意遮挡等问题[26],这对利用卫星遥感进行入河排污口排查而言是一项巨大的挑战.机载遥感因具备高空间和时间分辨率的特点,而具备一定的入河排污口排查的能力.近年来,随着无人机技术快速发展及设备成本不断降低,无人机以其灵活、低成本、数据实时采集能力强等优点,成为入河排污口排查的重要手段[27].然而,目前入河排污口无人机遥感识别仍是以目视解译为主[26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
彻查长江排污口 无人机放大招——访卫星环境应用中心航空遥感部副主任杨海军
1
2019
... 入河排污口体积小、空间分布稀疏且不均,并且可能存在故意遮挡等问题[26],这对利用卫星遥感进行入河排污口排查而言是一项巨大的挑战.机载遥感因具备高空间和时间分辨率的特点,而具备一定的入河排污口排查的能力.近年来,随着无人机技术快速发展及设备成本不断降低,无人机以其灵活、低成本、数据实时采集能力强等优点,成为入河排污口排查的重要手段[27].然而,目前入河排污口无人机遥感识别仍是以目视解译为主[26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
水源地污染源无人机遥感监测
2
2015
... 入河排污口体积小、空间分布稀疏且不均,并且可能存在故意遮挡等问题[26],这对利用卫星遥感进行入河排污口排查而言是一项巨大的挑战.机载遥感因具备高空间和时间分辨率的特点,而具备一定的入河排污口排查的能力.近年来,随着无人机技术快速发展及设备成本不断降低,无人机以其灵活、低成本、数据实时采集能力强等优点,成为入河排污口排查的重要手段[27].然而,目前入河排污口无人机遥感识别仍是以目视解译为主[26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
... [28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
水源地污染源无人机遥感监测
2
2015
... 入河排污口体积小、空间分布稀疏且不均,并且可能存在故意遮挡等问题[26],这对利用卫星遥感进行入河排污口排查而言是一项巨大的挑战.机载遥感因具备高空间和时间分辨率的特点,而具备一定的入河排污口排查的能力.近年来,随着无人机技术快速发展及设备成本不断降低,无人机以其灵活、低成本、数据实时采集能力强等优点,成为入河排污口排查的重要手段[27].然而,目前入河排污口无人机遥感识别仍是以目视解译为主[26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
... [28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
无人机遥感技术在海域监测陆源排污口中的应用
0
2019
无人机遥感技术在海域监测陆源排污口中的应用
0
2019
大连黄海地区入海排污口高分辨率航测排查
0
2020
大连黄海地区入海排污口高分辨率航测排查
0
2020
无人机航测技术在入海排污口排查中的应用
1
2020
... 入河排污口体积小、空间分布稀疏且不均,并且可能存在故意遮挡等问题[26],这对利用卫星遥感进行入河排污口排查而言是一项巨大的挑战.机载遥感因具备高空间和时间分辨率的特点,而具备一定的入河排污口排查的能力.近年来,随着无人机技术快速发展及设备成本不断降低,无人机以其灵活、低成本、数据实时采集能力强等优点,成为入河排污口排查的重要手段[27].然而,目前入河排污口无人机遥感识别仍是以目视解译为主[26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
无人机航测技术在入海排污口排查中的应用
1
2020
... 入河排污口体积小、空间分布稀疏且不均,并且可能存在故意遮挡等问题[26],这对利用卫星遥感进行入河排污口排查而言是一项巨大的挑战.机载遥感因具备高空间和时间分辨率的特点,而具备一定的入河排污口排查的能力.近年来,随着无人机技术快速发展及设备成本不断降低,无人机以其灵活、低成本、数据实时采集能力强等优点,成为入河排污口排查的重要手段[27].然而,目前入河排污口无人机遥感识别仍是以目视解译为主[26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
WHU-Hi: UAV-borne hyperspectral with high spatial resolution (H2) benchmark datasets and classifier for precise crop identification based on deep convolutional neural network with CRF
1
2020
... 入河排污口体积小、空间分布稀疏且不均,并且可能存在故意遮挡等问题[26],这对利用卫星遥感进行入河排污口排查而言是一项巨大的挑战.机载遥感因具备高空间和时间分辨率的特点,而具备一定的入河排污口排查的能力.近年来,随着无人机技术快速发展及设备成本不断降低,无人机以其灵活、低成本、数据实时采集能力强等优点,成为入河排污口排查的重要手段[27].然而,目前入河排污口无人机遥感识别仍是以目视解译为主[26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
Feature selection solution with high dimensionality and low-sample size for land cover classification in object-based image analysis
1
2017
... 入河排污口体积小、空间分布稀疏且不均,并且可能存在故意遮挡等问题[26],这对利用卫星遥感进行入河排污口排查而言是一项巨大的挑战.机载遥感因具备高空间和时间分辨率的特点,而具备一定的入河排污口排查的能力.近年来,随着无人机技术快速发展及设备成本不断降低,无人机以其灵活、低成本、数据实时采集能力强等优点,成为入河排污口排查的重要手段[27].然而,目前入河排污口无人机遥感识别仍是以目视解译为主[26,28-31].如洪运富等[28]在2015年就开始使用无人机彩色和热红外影像监测水源地污染源,通过热红外影像实现了隐藏入河排污口的检测.王贵作等[26]系统地验证了无人机排污口排查的可行性,并总结了两类难识别排污口(遮蔽式和浸没式)的识别方法,并建议飞行航线应适度向河道中心线偏离岸线30°左右、飞行高度应在40~80 m之间,为后续全国范围内的入河排污口三级排查打下基础.然而,厘米级分辨率的无人机影像在为入河排污口排查提供了有效的遥感数据源的同时,也导致了严重的光谱变异性和空间异质性[32],这使得基于像元或面向对象的遥感影像分类法在无人机遥感影像中面临严重的挑战[33],这主要是因为:在厘米级别的分辨率下,单个入河排污口可能包括数百至上千个像元,严重的类内光谱变异导致基于像元的算法失效;同时,入河排污口在不同区域上存在尺度变化,对于面向对象的算法而言,选择最佳尺度也成为一项极具挑战的任务.近年来,基于深度学习的目标检测算法在计算机视觉领域自然图像目标检测任务上发展迅速,其强大的特征学习能力,为无人机入河排污口识别提供了新的解决方案[3]. ...
Rich feature hierarchies for accurate object detection and semantic segmentation
1
2014
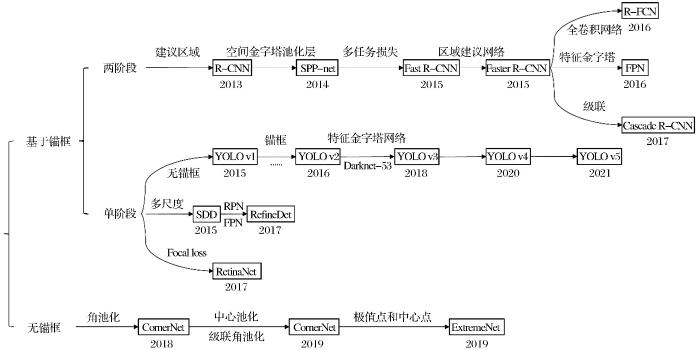
... 由Girshick等[34]提出的两阶段目标检测算法R-CNN将深度学习引入到目标检测领域,后续比较重要的两阶段算法总体范式基本不变,在检测速度和精度上对R-CNN逐步进行改进:SPP-net[35]在全连接层前增加一个空间金字塔池化层,既避免重复计算重叠建议区域的特征,也使得整个结构能够输入不同尺寸的图像;Fast R-CNN[36]改进为将特征提取、分类和边界框回归统一起来进行学习;Faster R-CNN [37]使用区域提议网络生成建议区域,实现了大部分计算的共享;R-FCN[38]舍弃全连接层,引入全卷积网络[39](FCN, Fully Convolutional Network)来实现计算共享;FPN[40]通过自顶向下和横向连接的方式融合不同的特征层,并对融合后的多层特征层进行不同尺度的建议区域提取和检测;Cascade R-CNN[41]提出一个级联检测器,分成多个阶段,前一个阶段的边界框输出作为下一个阶段的输入,并依次提高IoU阈值. ...
Spatial pyramid pooling in deep convolutional networks for visual recognition
1
2015
... 由Girshick等[34]提出的两阶段目标检测算法R-CNN将深度学习引入到目标检测领域,后续比较重要的两阶段算法总体范式基本不变,在检测速度和精度上对R-CNN逐步进行改进:SPP-net[35]在全连接层前增加一个空间金字塔池化层,既避免重复计算重叠建议区域的特征,也使得整个结构能够输入不同尺寸的图像;Fast R-CNN[36]改进为将特征提取、分类和边界框回归统一起来进行学习;Faster R-CNN [37]使用区域提议网络生成建议区域,实现了大部分计算的共享;R-FCN[38]舍弃全连接层,引入全卷积网络[39](FCN, Fully Convolutional Network)来实现计算共享;FPN[40]通过自顶向下和横向连接的方式融合不同的特征层,并对融合后的多层特征层进行不同尺度的建议区域提取和检测;Cascade R-CNN[41]提出一个级联检测器,分成多个阶段,前一个阶段的边界框输出作为下一个阶段的输入,并依次提高IoU阈值. ...
Fast R-CNN
1
2015
... 由Girshick等[34]提出的两阶段目标检测算法R-CNN将深度学习引入到目标检测领域,后续比较重要的两阶段算法总体范式基本不变,在检测速度和精度上对R-CNN逐步进行改进:SPP-net[35]在全连接层前增加一个空间金字塔池化层,既避免重复计算重叠建议区域的特征,也使得整个结构能够输入不同尺寸的图像;Fast R-CNN[36]改进为将特征提取、分类和边界框回归统一起来进行学习;Faster R-CNN [37]使用区域提议网络生成建议区域,实现了大部分计算的共享;R-FCN[38]舍弃全连接层,引入全卷积网络[39](FCN, Fully Convolutional Network)来实现计算共享;FPN[40]通过自顶向下和横向连接的方式融合不同的特征层,并对融合后的多层特征层进行不同尺度的建议区域提取和检测;Cascade R-CNN[41]提出一个级联检测器,分成多个阶段,前一个阶段的边界框输出作为下一个阶段的输入,并依次提高IoU阈值. ...
Faster R-CNN:Towards real-time object detection with region proposal networks
1
2015
... 由Girshick等[34]提出的两阶段目标检测算法R-CNN将深度学习引入到目标检测领域,后续比较重要的两阶段算法总体范式基本不变,在检测速度和精度上对R-CNN逐步进行改进:SPP-net[35]在全连接层前增加一个空间金字塔池化层,既避免重复计算重叠建议区域的特征,也使得整个结构能够输入不同尺寸的图像;Fast R-CNN[36]改进为将特征提取、分类和边界框回归统一起来进行学习;Faster R-CNN [37]使用区域提议网络生成建议区域,实现了大部分计算的共享;R-FCN[38]舍弃全连接层,引入全卷积网络[39](FCN, Fully Convolutional Network)来实现计算共享;FPN[40]通过自顶向下和横向连接的方式融合不同的特征层,并对融合后的多层特征层进行不同尺度的建议区域提取和检测;Cascade R-CNN[41]提出一个级联检测器,分成多个阶段,前一个阶段的边界框输出作为下一个阶段的输入,并依次提高IoU阈值. ...
R-FCN: Object detection via region-based fully convolutional networks
1
2016
... 由Girshick等[34]提出的两阶段目标检测算法R-CNN将深度学习引入到目标检测领域,后续比较重要的两阶段算法总体范式基本不变,在检测速度和精度上对R-CNN逐步进行改进:SPP-net[35]在全连接层前增加一个空间金字塔池化层,既避免重复计算重叠建议区域的特征,也使得整个结构能够输入不同尺寸的图像;Fast R-CNN[36]改进为将特征提取、分类和边界框回归统一起来进行学习;Faster R-CNN [37]使用区域提议网络生成建议区域,实现了大部分计算的共享;R-FCN[38]舍弃全连接层,引入全卷积网络[39](FCN, Fully Convolutional Network)来实现计算共享;FPN[40]通过自顶向下和横向连接的方式融合不同的特征层,并对融合后的多层特征层进行不同尺度的建议区域提取和检测;Cascade R-CNN[41]提出一个级联检测器,分成多个阶段,前一个阶段的边界框输出作为下一个阶段的输入,并依次提高IoU阈值. ...
Fully convolutional networks for semantic segmentation
1
2015
... 由Girshick等[34]提出的两阶段目标检测算法R-CNN将深度学习引入到目标检测领域,后续比较重要的两阶段算法总体范式基本不变,在检测速度和精度上对R-CNN逐步进行改进:SPP-net[35]在全连接层前增加一个空间金字塔池化层,既避免重复计算重叠建议区域的特征,也使得整个结构能够输入不同尺寸的图像;Fast R-CNN[36]改进为将特征提取、分类和边界框回归统一起来进行学习;Faster R-CNN [37]使用区域提议网络生成建议区域,实现了大部分计算的共享;R-FCN[38]舍弃全连接层,引入全卷积网络[39](FCN, Fully Convolutional Network)来实现计算共享;FPN[40]通过自顶向下和横向连接的方式融合不同的特征层,并对融合后的多层特征层进行不同尺度的建议区域提取和检测;Cascade R-CNN[41]提出一个级联检测器,分成多个阶段,前一个阶段的边界框输出作为下一个阶段的输入,并依次提高IoU阈值. ...
Feature pyramid networks for object detection
1
2017
... 由Girshick等[34]提出的两阶段目标检测算法R-CNN将深度学习引入到目标检测领域,后续比较重要的两阶段算法总体范式基本不变,在检测速度和精度上对R-CNN逐步进行改进:SPP-net[35]在全连接层前增加一个空间金字塔池化层,既避免重复计算重叠建议区域的特征,也使得整个结构能够输入不同尺寸的图像;Fast R-CNN[36]改进为将特征提取、分类和边界框回归统一起来进行学习;Faster R-CNN [37]使用区域提议网络生成建议区域,实现了大部分计算的共享;R-FCN[38]舍弃全连接层,引入全卷积网络[39](FCN, Fully Convolutional Network)来实现计算共享;FPN[40]通过自顶向下和横向连接的方式融合不同的特征层,并对融合后的多层特征层进行不同尺度的建议区域提取和检测;Cascade R-CNN[41]提出一个级联检测器,分成多个阶段,前一个阶段的边界框输出作为下一个阶段的输入,并依次提高IoU阈值. ...
Cascade R-CNN:Delving into high quality object detection
1
2018
... 由Girshick等[34]提出的两阶段目标检测算法R-CNN将深度学习引入到目标检测领域,后续比较重要的两阶段算法总体范式基本不变,在检测速度和精度上对R-CNN逐步进行改进:SPP-net[35]在全连接层前增加一个空间金字塔池化层,既避免重复计算重叠建议区域的特征,也使得整个结构能够输入不同尺寸的图像;Fast R-CNN[36]改进为将特征提取、分类和边界框回归统一起来进行学习;Faster R-CNN [37]使用区域提议网络生成建议区域,实现了大部分计算的共享;R-FCN[38]舍弃全连接层,引入全卷积网络[39](FCN, Fully Convolutional Network)来实现计算共享;FPN[40]通过自顶向下和横向连接的方式融合不同的特征层,并对融合后的多层特征层进行不同尺度的建议区域提取和检测;Cascade R-CNN[41]提出一个级联检测器,分成多个阶段,前一个阶段的边界框输出作为下一个阶段的输入,并依次提高IoU阈值. ...
You only look once: Unified, real-time object detection
1
2016
... 单阶段检测算法是从2016年提出的YOLO[42]和SSD[43]目标检测算法开始迅速发展的,主要有3条发展路径:一条沿着YOLO、一条沿着SSD以及RetinaNet[44].它与两阶段检测算法区别就是:单阶段检测算法没有锚框从粗糙到精细的修正过程,直接一步在每个点上对边界框参数进行回归.YOLO算法实际上是一种无锚框算法,从YOLO延伸出了一系列基于锚框的单阶段算法:YOLO v2-v4[45-47],不断加入各种技巧以提升检测精度.SSD在6个不同尺度的特征层预测不同大小的对象,在每个点上生成一组默认锚框,直接预测得到其边界框参数和类别参数;RefineDet[48]将区域提议网络(Region Proposal Network, RPN)和特征金字塔网络(FPN, Feature Pyramid Networks)引入SSD算法,以提高检测精度和小物体检测效果.RetinaNet在交叉熵损失函数上进行修改,提出了Focal Loss损失函数. ...
SSD: Single shot multibox detector
1
2016
... 单阶段检测算法是从2016年提出的YOLO[42]和SSD[43]目标检测算法开始迅速发展的,主要有3条发展路径:一条沿着YOLO、一条沿着SSD以及RetinaNet[44].它与两阶段检测算法区别就是:单阶段检测算法没有锚框从粗糙到精细的修正过程,直接一步在每个点上对边界框参数进行回归.YOLO算法实际上是一种无锚框算法,从YOLO延伸出了一系列基于锚框的单阶段算法:YOLO v2-v4[45-47],不断加入各种技巧以提升检测精度.SSD在6个不同尺度的特征层预测不同大小的对象,在每个点上生成一组默认锚框,直接预测得到其边界框参数和类别参数;RefineDet[48]将区域提议网络(Region Proposal Network, RPN)和特征金字塔网络(FPN, Feature Pyramid Networks)引入SSD算法,以提高检测精度和小物体检测效果.RetinaNet在交叉熵损失函数上进行修改,提出了Focal Loss损失函数. ...
Focal loss for dense object detection
1
2017
... 单阶段检测算法是从2016年提出的YOLO[42]和SSD[43]目标检测算法开始迅速发展的,主要有3条发展路径:一条沿着YOLO、一条沿着SSD以及RetinaNet[44].它与两阶段检测算法区别就是:单阶段检测算法没有锚框从粗糙到精细的修正过程,直接一步在每个点上对边界框参数进行回归.YOLO算法实际上是一种无锚框算法,从YOLO延伸出了一系列基于锚框的单阶段算法:YOLO v2-v4[45-47],不断加入各种技巧以提升检测精度.SSD在6个不同尺度的特征层预测不同大小的对象,在每个点上生成一组默认锚框,直接预测得到其边界框参数和类别参数;RefineDet[48]将区域提议网络(Region Proposal Network, RPN)和特征金字塔网络(FPN, Feature Pyramid Networks)引入SSD算法,以提高检测精度和小物体检测效果.RetinaNet在交叉熵损失函数上进行修改,提出了Focal Loss损失函数. ...
YOLO9000: better, faster, stronger
1
2017
... 单阶段检测算法是从2016年提出的YOLO[42]和SSD[43]目标检测算法开始迅速发展的,主要有3条发展路径:一条沿着YOLO、一条沿着SSD以及RetinaNet[44].它与两阶段检测算法区别就是:单阶段检测算法没有锚框从粗糙到精细的修正过程,直接一步在每个点上对边界框参数进行回归.YOLO算法实际上是一种无锚框算法,从YOLO延伸出了一系列基于锚框的单阶段算法:YOLO v2-v4[45-47],不断加入各种技巧以提升检测精度.SSD在6个不同尺度的特征层预测不同大小的对象,在每个点上生成一组默认锚框,直接预测得到其边界框参数和类别参数;RefineDet[48]将区域提议网络(Region Proposal Network, RPN)和特征金字塔网络(FPN, Feature Pyramid Networks)引入SSD算法,以提高检测精度和小物体检测效果.RetinaNet在交叉熵损失函数上进行修改,提出了Focal Loss损失函数. ...
Yolov3: An incremental improvement
0
2018
Yolov4: Optimal speed and accuracy of object detection
1
2020
... 单阶段检测算法是从2016年提出的YOLO[42]和SSD[43]目标检测算法开始迅速发展的,主要有3条发展路径:一条沿着YOLO、一条沿着SSD以及RetinaNet[44].它与两阶段检测算法区别就是:单阶段检测算法没有锚框从粗糙到精细的修正过程,直接一步在每个点上对边界框参数进行回归.YOLO算法实际上是一种无锚框算法,从YOLO延伸出了一系列基于锚框的单阶段算法:YOLO v2-v4[45-47],不断加入各种技巧以提升检测精度.SSD在6个不同尺度的特征层预测不同大小的对象,在每个点上生成一组默认锚框,直接预测得到其边界框参数和类别参数;RefineDet[48]将区域提议网络(Region Proposal Network, RPN)和特征金字塔网络(FPN, Feature Pyramid Networks)引入SSD算法,以提高检测精度和小物体检测效果.RetinaNet在交叉熵损失函数上进行修改,提出了Focal Loss损失函数. ...
Single-shot refinement neural network for object detection
1
2018
... 单阶段检测算法是从2016年提出的YOLO[42]和SSD[43]目标检测算法开始迅速发展的,主要有3条发展路径:一条沿着YOLO、一条沿着SSD以及RetinaNet[44].它与两阶段检测算法区别就是:单阶段检测算法没有锚框从粗糙到精细的修正过程,直接一步在每个点上对边界框参数进行回归.YOLO算法实际上是一种无锚框算法,从YOLO延伸出了一系列基于锚框的单阶段算法:YOLO v2-v4[45-47],不断加入各种技巧以提升检测精度.SSD在6个不同尺度的特征层预测不同大小的对象,在每个点上生成一组默认锚框,直接预测得到其边界框参数和类别参数;RefineDet[48]将区域提议网络(Region Proposal Network, RPN)和特征金字塔网络(FPN, Feature Pyramid Networks)引入SSD算法,以提高检测精度和小物体检测效果.RetinaNet在交叉熵损失函数上进行修改,提出了Focal Loss损失函数. ...
Cornernet: Detecting objects as paired keypoints
1
2018
... 近期,无锚框的目标检测算法发展非常迅速,它不生成锚框并对其进行修正,其中心思想是将边界框重新定义,一般是定义为点对,如:CornerNet[49]将边界框定义为左上和右下两个角点,直接对它们进行预测;CenterNet[50]在CornerNet的基础上增加中心池化层来关注对象内部信息;ExtremeNet[51]检测上下左右4个极值点以及中心点,枚举出所有4个不同类极值点的边界组合,检查中心点是否正确.一般来说,无锚框的目标检测算法不预先生成锚框,能够得到更高质量的建议区域[4]. ...
Centernet: Keypoint triplets for object detection
1
2019
... 近期,无锚框的目标检测算法发展非常迅速,它不生成锚框并对其进行修正,其中心思想是将边界框重新定义,一般是定义为点对,如:CornerNet[49]将边界框定义为左上和右下两个角点,直接对它们进行预测;CenterNet[50]在CornerNet的基础上增加中心池化层来关注对象内部信息;ExtremeNet[51]检测上下左右4个极值点以及中心点,枚举出所有4个不同类极值点的边界组合,检查中心点是否正确.一般来说,无锚框的目标检测算法不预先生成锚框,能够得到更高质量的建议区域[4]. ...
Bottom-up object detection by grouping extreme and center points
1
2019
... 近期,无锚框的目标检测算法发展非常迅速,它不生成锚框并对其进行修正,其中心思想是将边界框重新定义,一般是定义为点对,如:CornerNet[49]将边界框定义为左上和右下两个角点,直接对它们进行预测;CenterNet[50]在CornerNet的基础上增加中心池化层来关注对象内部信息;ExtremeNet[51]检测上下左右4个极值点以及中心点,枚举出所有4个不同类极值点的边界组合,检查中心点是否正确.一般来说,无锚框的目标检测算法不预先生成锚框,能够得到更高质量的建议区域[4]. ...
Object detection in optical remote sensing images: A survey and a new benchmark
2
2020
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
... [52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
Rotated region based CNN for ship detection
1
2017
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
Arbitrary-oriented ship detection framework in optical remote-sensing images
0
2018
基于深度学习的遥感影像地物目标检测和轮廓提取一体化模型
1
2019
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
基于深度学习的遥感影像地物目标检测和轮廓提取一体化模型
1
2019
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
Vehicle detection in aerial images based on region convolutional neural networks and hard negative example mining
1
2017
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
Arbitrary-oriented vehicle detection in aerial imagery with single convolutional neural networks
1
2017
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
M-FCN: Effective fully convolutional network-based airplane detection framework
1
2017
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
Improving the precision and accuracy of animal population estimates with aerial image object detection
1
2019
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
A comparison of deep learning and citizen science techniques for counting wildlife in aerial survey images
0
2019
Wild animal survey using UAS imagery and deep learning: Modified faster R-CNN for kiang detection in Tibetan Plateau
1
2020
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
DOTA: A large-scale dataset for object detection in aerial images
1
2018
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
Multi-class geospatial object detection and geographic image classification based on collection of part detectors
1
2014
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
A large contextual dataset for classification, detection and counting of cars with deep learning
1
2016
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
Ship rotated bounding box space for ship extraction from high-resolution optical satellite images with complex backgrounds
1
2016
... 基于深度学习的目标检测算法主要以自然图像为应用对象,近年来应用深度学习进行遥感地物提取受到广泛关注[52].通过对Faster R-CNN、YOLO等深度学习算法进行改进,构建了诸如船只[53-55]、车辆[56-57]、飞机[58]、野生动物[59-61]等特定对象的目标检测网络.也出现了许多公开的遥感目标检测数据集,如:DOTA[62]、DIOR[52]、NWPU VHR-10[63]、COWC[64]、HRSC2016[65]等. ...
基于深度学习的无人机航拍图像排污口检测方法研究
1
2021
... 基于深度学习的遥感入河排污口识别的研究还较少,当前的各个数据集也没有入河排污口这一类型.鉴于入河排污口的重要性,已有学者开展了相关方面的研究.祁舟[66]基于Faster R-CNN检测算法,设计了一种生成对抗网络来扩充数据集,使用特征融合后的低层特征进行无人机影像的入河排污口的检测,研究表明,该方法随着样本的增加,检测效果显著提升.黄耀欢等[3]使用入河排污口三级排查工作的无人机影像和入河排污口排查结果,基于Faster R-CNN检测算法,在锚框尺寸优化、感兴趣区域数量调整、困难负样本挖掘的基础上,构建了一套基于地学知识的入河排污口深度学习检测算法(GDCNN-outfalls).该算法通过引入空间激活函数以及DSM辅助信息来表达入河排污口空间地学特征,与深度学习算法融合进行入河排污口检测,该模型查全率约为80%,比原始Faster R-CNN检测算法查准率提高超过20倍,比人工目视解译效率提升7倍,展现了基于深度学习进行入河排污口无人机遥感检测的广阔前景.通过上述研究可以发现,入河排污口遥感目标和自然图像目标之间存在巨大差异,将自然图像上训练的深度网络用于入河排污口无人机遥感检测需要在自然图像目标检测网络基础上进行改进以适配无人机遥感图像[67].相比于自然图像,排污口在无人机遥感图像中遥感目标小、少,背景类型复杂,方向随机无序,标注样本数据少,增加了排污口深度学习检测的难度.因此,充分利用入河排污口的地学知识进行深度学习是提高检测精度的一个重要方向.此外,算法层面可通过以下方面进行改进:如提升检测网络对数据量大、背景复杂度高、目标形态多样(如小目标、群目标)的适应性;提升检测网络对目标方向的适应性;提升检测网络对数据域迁移的适应性. ...
基于深度学习的无人机航拍图像排污口检测方法研究
1
2021
... 基于深度学习的遥感入河排污口识别的研究还较少,当前的各个数据集也没有入河排污口这一类型.鉴于入河排污口的重要性,已有学者开展了相关方面的研究.祁舟[66]基于Faster R-CNN检测算法,设计了一种生成对抗网络来扩充数据集,使用特征融合后的低层特征进行无人机影像的入河排污口的检测,研究表明,该方法随着样本的增加,检测效果显著提升.黄耀欢等[3]使用入河排污口三级排查工作的无人机影像和入河排污口排查结果,基于Faster R-CNN检测算法,在锚框尺寸优化、感兴趣区域数量调整、困难负样本挖掘的基础上,构建了一套基于地学知识的入河排污口深度学习检测算法(GDCNN-outfalls).该算法通过引入空间激活函数以及DSM辅助信息来表达入河排污口空间地学特征,与深度学习算法融合进行入河排污口检测,该模型查全率约为80%,比原始Faster R-CNN检测算法查准率提高超过20倍,比人工目视解译效率提升7倍,展现了基于深度学习进行入河排污口无人机遥感检测的广阔前景.通过上述研究可以发现,入河排污口遥感目标和自然图像目标之间存在巨大差异,将自然图像上训练的深度网络用于入河排污口无人机遥感检测需要在自然图像目标检测网络基础上进行改进以适配无人机遥感图像[67].相比于自然图像,排污口在无人机遥感图像中遥感目标小、少,背景类型复杂,方向随机无序,标注样本数据少,增加了排污口深度学习检测的难度.因此,充分利用入河排污口的地学知识进行深度学习是提高检测精度的一个重要方向.此外,算法层面可通过以下方面进行改进:如提升检测网络对数据量大、背景复杂度高、目标形态多样(如小目标、群目标)的适应性;提升检测网络对目标方向的适应性;提升检测网络对数据域迁移的适应性. ...
基于卷积神经网络的光学遥感目标检测研究进展
1
2020
... 基于深度学习的遥感入河排污口识别的研究还较少,当前的各个数据集也没有入河排污口这一类型.鉴于入河排污口的重要性,已有学者开展了相关方面的研究.祁舟[66]基于Faster R-CNN检测算法,设计了一种生成对抗网络来扩充数据集,使用特征融合后的低层特征进行无人机影像的入河排污口的检测,研究表明,该方法随着样本的增加,检测效果显著提升.黄耀欢等[3]使用入河排污口三级排查工作的无人机影像和入河排污口排查结果,基于Faster R-CNN检测算法,在锚框尺寸优化、感兴趣区域数量调整、困难负样本挖掘的基础上,构建了一套基于地学知识的入河排污口深度学习检测算法(GDCNN-outfalls).该算法通过引入空间激活函数以及DSM辅助信息来表达入河排污口空间地学特征,与深度学习算法融合进行入河排污口检测,该模型查全率约为80%,比原始Faster R-CNN检测算法查准率提高超过20倍,比人工目视解译效率提升7倍,展现了基于深度学习进行入河排污口无人机遥感检测的广阔前景.通过上述研究可以发现,入河排污口遥感目标和自然图像目标之间存在巨大差异,将自然图像上训练的深度网络用于入河排污口无人机遥感检测需要在自然图像目标检测网络基础上进行改进以适配无人机遥感图像[67].相比于自然图像,排污口在无人机遥感图像中遥感目标小、少,背景类型复杂,方向随机无序,标注样本数据少,增加了排污口深度学习检测的难度.因此,充分利用入河排污口的地学知识进行深度学习是提高检测精度的一个重要方向.此外,算法层面可通过以下方面进行改进:如提升检测网络对数据量大、背景复杂度高、目标形态多样(如小目标、群目标)的适应性;提升检测网络对目标方向的适应性;提升检测网络对数据域迁移的适应性. ...
基于卷积神经网络的光学遥感目标检测研究进展
1
2020
... 基于深度学习的遥感入河排污口识别的研究还较少,当前的各个数据集也没有入河排污口这一类型.鉴于入河排污口的重要性,已有学者开展了相关方面的研究.祁舟[66]基于Faster R-CNN检测算法,设计了一种生成对抗网络来扩充数据集,使用特征融合后的低层特征进行无人机影像的入河排污口的检测,研究表明,该方法随着样本的增加,检测效果显著提升.黄耀欢等[3]使用入河排污口三级排查工作的无人机影像和入河排污口排查结果,基于Faster R-CNN检测算法,在锚框尺寸优化、感兴趣区域数量调整、困难负样本挖掘的基础上,构建了一套基于地学知识的入河排污口深度学习检测算法(GDCNN-outfalls).该算法通过引入空间激活函数以及DSM辅助信息来表达入河排污口空间地学特征,与深度学习算法融合进行入河排污口检测,该模型查全率约为80%,比原始Faster R-CNN检测算法查准率提高超过20倍,比人工目视解译效率提升7倍,展现了基于深度学习进行入河排污口无人机遥感检测的广阔前景.通过上述研究可以发现,入河排污口遥感目标和自然图像目标之间存在巨大差异,将自然图像上训练的深度网络用于入河排污口无人机遥感检测需要在自然图像目标检测网络基础上进行改进以适配无人机遥感图像[67].相比于自然图像,排污口在无人机遥感图像中遥感目标小、少,背景类型复杂,方向随机无序,标注样本数据少,增加了排污口深度学习检测的难度.因此,充分利用入河排污口的地学知识进行深度学习是提高检测精度的一个重要方向.此外,算法层面可通过以下方面进行改进:如提升检测网络对数据量大、背景复杂度高、目标形态多样(如小目标、群目标)的适应性;提升检测网络对目标方向的适应性;提升检测网络对数据域迁移的适应性. ...
遥感影像智能解译样本库现状与研究
1
2021
... (2)建设入河排污口无人机影像深度学习样本库.深度学习网络训练过程的效率在很大程度上依赖于其标注的目标样本的完整性、代表性和样本量,而现阶段入河排污口训练样本有限,这使得深度学习网络中大量的参数难以获取全面的训练和优化,制约了深度学习算法的实际业务化应用.为此,构建满足深度学习的遥感影像样本库,尤其是无人机影像样本库是一个重要的发展方向.对于其他地物的深度学习遥感提取研究而言,构建遥感样本库同样是繁重的、基础性的工作,可喜的是相关科学工作者已意识到其重要性,并开展了相关工作[68]. ...
遥感影像智能解译样本库现状与研究
1
2021
... (2)建设入河排污口无人机影像深度学习样本库.深度学习网络训练过程的效率在很大程度上依赖于其标注的目标样本的完整性、代表性和样本量,而现阶段入河排污口训练样本有限,这使得深度学习网络中大量的参数难以获取全面的训练和优化,制约了深度学习算法的实际业务化应用.为此,构建满足深度学习的遥感影像样本库,尤其是无人机影像样本库是一个重要的发展方向.对于其他地物的深度学习遥感提取研究而言,构建遥感样本库同样是繁重的、基础性的工作,可喜的是相关科学工作者已意识到其重要性,并开展了相关工作[68]. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}