




1 引 言
黄土高原地貌类型独特而复杂,切沟侵蚀是塑造该区地貌的主要动力之一。切沟侵蚀产沙量占流域产沙量的60%—90%[1],且沟头溯源侵蚀强烈,是沟谷发育及土壤侵蚀最活跃的类型之一,对黄土地貌特征及其演变过程具有重要作用[2]。研究快速有效的切沟提取方法,对探究切沟发育规律以及防治切沟侵蚀具有重要意义。由于切沟密度大,传统的直接测量方法耗时长、难度大,在较大时空尺度上使用更是极其困难。随着地理数据采集技术的发展,越来越多的卫星遥感影像用于间接测量切沟侵蚀。广泛采用的目视解译方法依赖于图像特征和解译者的专业知识[3],不仅效率较低,解译精度还受到主观因素的影响。因此,研究人员一直在探索切沟自动化的提取方法,但尚未形成实用的算法。面向对象的方法可以充分利用高分辨率信息,大大提高切沟提取的精度[4],多种高分辨率影像已被用于进行基于面向对象的切沟提取[5-6]。机器学习算法可以增强对高分辨率影像数据的解译能力[7],在众多的机器学习算法中,随机森林算法有性能稳定、训练速度快、准确度高等特点[8],被逐渐应用于切沟的监测中[9-12]。然而,目前国内关于切沟自动提取的研究相对较少,严重限制了遥感技术在沟蚀监测中的应用。
本文探索3种分辨率遥感影像自动提取切沟形态特征参数的方法和精度,建立不同分辨率影像提取切沟沟长和面积的转换模型。以期为切沟侵蚀遥感监测、定量模拟以及切沟防治等研究提供技术支持和科学依据。
2 研究区和数据源
2.1 研究区概况
图1

研究区范围内主要有切沟、冲沟和干沟。其中,切沟是发育在坡面上的侵蚀沟,也是最活跃的侵蚀沟[20],规模相对于冲沟和干沟较小,解译难度更大,本文研究沟缘线自动提取方法,选取30条典型切沟分析其参数提取精度。
2.2 数据源
数据来源于GF-1影像、Google影像和无人机航拍数据。其中,GF-1包括2014年10月GF-1 PMS2多光谱(8 m分辨率)和全色(2 m分辨率)影像;Google影像从BIGEMAP平台(http:∥www.bigemap.com/)下载,拍摄时间为 2018年11月,包括红绿蓝3个波段,分辨率为0.5 m,数据源为Pléiades-1A卫星影像;无人机航拍数据由大疆Inspire2无人机搭载的X4云台相机拍摄,时间为2019年10月,分辨率为0.14 m。上述3种不同数据源存在一定时间差,用于比较切沟参数提取精度可能会存在一定误差,但不会影响的切沟自动提取方法的研究。切沟形成后其发展过程相对较慢[21],在使用2018年Google影像与2019年无人机影像比较,2014年的2 m和8 m分辨率数据进行比较时,由于切沟变化造成的误差对研究结果的影响很小。
利用ENVI 5.3对GF-1影像进行正射校正、辐射定标和大气校正,并将全色波段和多光谱波段融合,获得分辨率为2 m的影像。在Pix4Dmapper软件中镶嵌和处理无人机图像,使用自动空中三角测量技术生成数字正射影像,空间分辨率为0.14 m。以无人机影像为对照分别对其他3种影像进行配准,影像空间坐标系统均转换为WGS-84/UTM zone 49 N。
为探究不同分辨率遥感影像自动提取切沟的精度差异,以无人机正射影像为参考数据,将Google影像(0.5 m分辨率)和GF-1影像(包括2 m分辨率的融合影像以及8 m分辨率多光谱影像)用于切沟的自动提取和精度分析。
3 研究方法
3.1 影像分割
使用eCognition Developer 9,选择多尺度分割方法实现影像分割。利用Drăgut等[22]提出的ESP2工具选择最优分割尺度,该工具可以在输入形状、紧致度和其他参数(如循环的数量和起始尺度)后,以局部方差(Local Variance, LV)计算影像内部异质性,根据局部方差变化率(Rate Of Change of LV, ROC)指示最优分割尺度(局部方差变化率图像极值点即为可能的最优尺度)。
其中:LV(L)为目标尺度上对象层L的局部方差;LV(L-1)为L的下一层L-1的局部方差。
为了评价潜在参数组合的分割效果,采用Clinton等[23]提出的3个基于集合对象的差异性指标,即过分割(Over-Segmentation,OS)、欠分割(Under-Seg-mentation,US)和欧氏距离(Euclidian Distance,ED)。
其中:ri 是参考对象的范围;sk 是分割对象的范围。OS和US表示参考对象和分割对象之间的匹配程度,ED是一个组合指标,表示与最优分割结果的接近程度。在理想情况下,3个指标均为零。
3.2 特征变量选择
选取光谱特征、纹理特征、几何特征3类共55个特征信息用于切沟的自动提取(表1)。
表 1 用于提取切沟的影像特征列表
Table 1
| 特征类型 | 特征名称 | 简称 | 特征数量 |
|---|---|---|---|
| 光谱特征 | 均值 | Mean R, Mean G, Mean B, Mean NIR | 4 |
| 标准差 | Sd R, Sd G, Sd B, Sd NIR | 4 | |
| 波段最大差异 | MaxDiff | 1 | |
| 总体亮度值 | Brightness | 1 | |
| 波段比率 | ratio_GB, ratio_RB, ratio_RG,ratio_RN | 4 | |
| 归一化植被指数 | NDVI | 1 | |
| 纹理特征 | 均值 | GL_M R, GL_M G, GL_M B, GL_M NIR | 4 |
| 标准差 | GL_S R, GL_S G, GL_S B, GL_S NIR | 4 | |
| 熵 | GL_E R, GL_E G, GL_E B, GL_E NIR | 4 | |
| 同质度 | GL_H R, GL_H G, GL_H B, GL_H NIR | 4 | |
| 对比度 | GL_Con R, GL_Con G, GL_Con B, GL_Con NIR | 4 | |
| 非相似性 | GL_D R, GL_D G, GL_D B, GL_D NIR | 4 | |
| 角二阶矩 | GL_A R, GL_A G, GL_A B, GL_A NIR | 4 | |
| 相关性 | GL_Cor R, GL_Cor G, GL_Cor B, GL_Cor NIR | 4 | |
| 几何特征 | 面积 | Area | 1 |
| 长宽比 | LW | 1 | |
| 长度 | Length | 1 | |
| 形状指数 | SI | 1 | |
| 不对称性 | Asymmetry | 1 | |
| 圆度 | Roundness | 1 | |
| 紧致度 | Compactness | 1 | |
| 矩形拟合 | RF | 1 |
(1) 光谱特征:影像中红、绿、蓝、近红外波段的均值和标准差、波段比率[24]、归一化植被指数(NDVI)等15个特征。
(2) 纹理特征:影像中红、绿、蓝、近红外波段的全方位灰度共生矩阵(GLCM)的32个特征。
(3) 几何特征:基于对象的形状获取信息,根据构成对象的像元计算特征值对象几何形态特征共8个。
采用随机森林的袋外数据(Out Of Bag,OOB)误差计算特征重要性得分,对高维特征空间进行筛选。通过多个决策树构建随机森林,计算每个决策树的OOB误差,再随机为OOB数据中某一特征赋干扰值,计算新的OOB误差,若误差增加幅度越大,则该变量重要性越高。
3.3 随机森林分类
其中:hi 指单棵决策树;Y是输出变量;I(·)是示性函数,取值范围为0和1。
训练数据在参考无人机影像的基础上,基于待分类影像进行选取,由于影像空间分辨率及获取时间有一定差异,针对3种影像分别选取训练样本,分类体系为:沟谷地、农用地、建设用地和未利用地。
3.4 精度评价方法
3.4.1 分类精度评价
以无人机正射影像为参考数据,选取验证样本,使用混淆矩阵验证3种分辨率遥感影像的分类精度。评价指标为总体精度、Kappa系数、用户精度和制图精度。
3.4.2 切沟参数提取和精度评价
基于自动提取的沟缘线,选取研究区内30条典型切沟,依据李镇等[27]确定的方法,提取并计算切沟面积(A)和长度(L):以沟口两侧最短沟缘为基准,向另一侧沟缘做垂直于切沟中心轴线的直线,将沟头到直线的距离定义为沟长(L);沟缘线与该直线围成闭合区域的面积为切沟的面积(A)。得到沟长和面积参数后,在ArcGIS 10.6中计算平均沟宽(W)。依据无人机正射影像(分辨率0.14 m),目视解译绘制沟缘线,再通过上述方法获取切沟参数,作为对照的实测值,使用平均绝对误差和百分误差评价切沟参数的提取精度。
4 结果与分析
4.1 确定最优分割参数组合
面向对象多尺度分割包含尺度、形状、紧致度3种分割参数,本文采用综合考虑3种参数的优化方法[28]。主要流程包括确定分割参数的范围、筛选潜在最优参数组合、分割效果精度评价3个步骤。
表2 Google影像和GF-1影像分割精度评价
Table 2
| 影像数据 | 尺度 | 形状 | 紧致度 | 过分割 | 欠分割 | 欧氏距离 |
|---|---|---|---|---|---|---|
| 390 | 0.2 | 0.7 | 0.125 | 0.102 | 0.114 | |
| 373 | 0.3 | 0.8 | 0.119 | 0.080 | 0.102 | |
| 439 | 0.4 | 0.8 | 0.149 | 0.081 | 0.120 | |
| 383 | 0.3 | 0.9 | 0.116 | 0.097 | 0.107 | |
| 398 | 0.4 | 0.7 | 0.109 | 0.108 | 0.109 | |
GF-1 (2 m) | 106 | 0.1 | 0.9 | 0.166 | 0.118 | 0.144 |
| 87 | 0.2 | 0.8 | 0.143 | 0.135 | 0.139 | |
| 84 | 0.3 | 0.7 | 0.150 | 0.115 | 0.134 | |
| 95 | 0.2 | 0.9 | 0.157 | 0.120 | 0.140 | |
| 86 | 0.3 | 0.8 | 0.173 | 0.126 | 0.151 | |
| 94 | 0.3 | 0.9 | 0.162 | 0.113 | 0.140 | |
| 81 | 0.4 | 0.8 | 0.152 | 0.123 | 0.138 | |
GF-1 (8 m) | 21 | 0.2 | 0.5 | 0.212 | 0.189 | 0.201 |
| 20 | 0.2 | 0.6 | 0.182 | 0.163 | 0.173 | |
| 24 | 0.3 | 0.6 | 0.185 | 0.170 | 0.178 | |
| 17 | 0.3 | 0.7 | 0.196 | 0.175 | 0.186 | |
| 21 | 0.4 | 0.8 | 0.203 | 0.182 | 0.193 |
图2
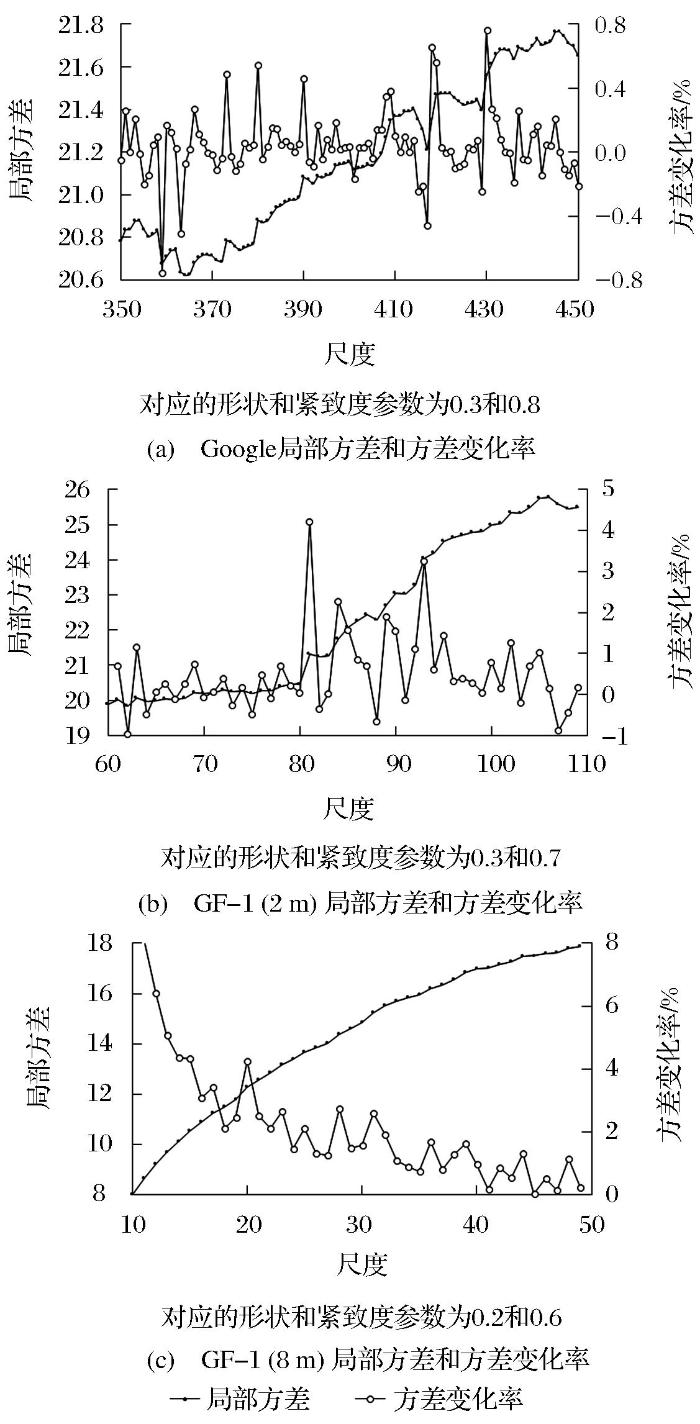
图2
不同分辨率影像局部方差、方差变化率变化曲线
Fig.2
LV and LV-ROC Curves of images with different resolution
4.2 特征优选结果
利用随机森林算法评估特征的重要性,根据重要性得分(全部特征的重要性得分之和为1)对特征变量进行排序。按照重要性排序逐个增加重要性大的特征进行分类并计算精度,通过建立分类总体精度与特征空间的关系筛选最优特征集合。选择重要性排序前35个特征进行精度验证(图3)。随着特征数量的增加,3种分辨率影像分类总体精度均呈现先显著增加,后上升减缓并趋于稳定,再小幅下降的趋势。特征数量不断增多,分类精度并没有持续提高,应是由于特征冗余而产生了“Hughes”现象。Google影像、GF-1(2 m)和GF-1(8 m)分类精度达到最高时的特征数量分别为14、19和25。将这3组特征集作为最优特征组合,进行后续的影像分类和切沟提取。
图3
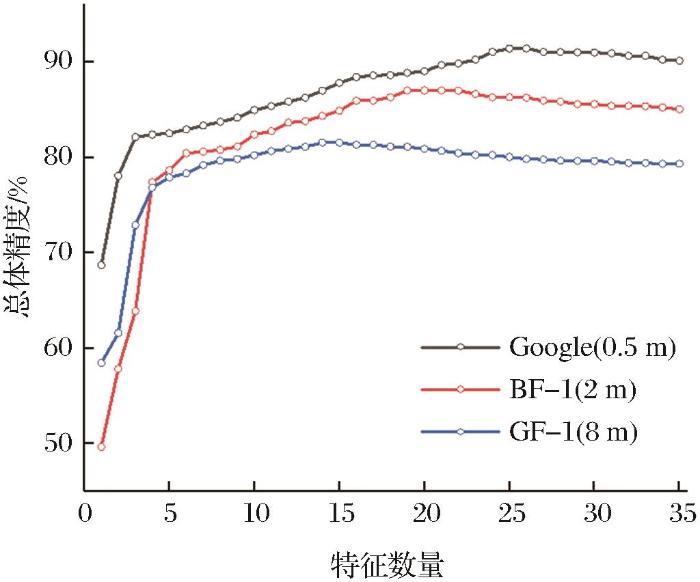
图3
不同分辨率影像特征数量与分类总体精度的关系
Fig.3
Relationship between the number of features and overall accuracy of images with different resolution
为进一步分析不同特征对分类精度的影响,选取排名前20的特征生成特征重要性分布图(图4)。3种分辨率影像的光谱特征排名均靠前,其中波段比率特征ratio_RB排名均在前5,因此红光波段和绿光波段的比值为最具判别效果的特征。其他波段比率特征的重要性也排在前列,该类特征可以在一定程度上消除地形阴影的影响,突出不同地物间波谱差异。随着影像分辨率降低,纹理特征的重要性逐渐下降。几何特征大多排名在20位以后,表明在切沟提取时,加入几何特征在提高分类精度方面效果甚微。按照特征类别,特征变量的重要性排序如下:光谱特征>纹理特征>几何特征。
图4
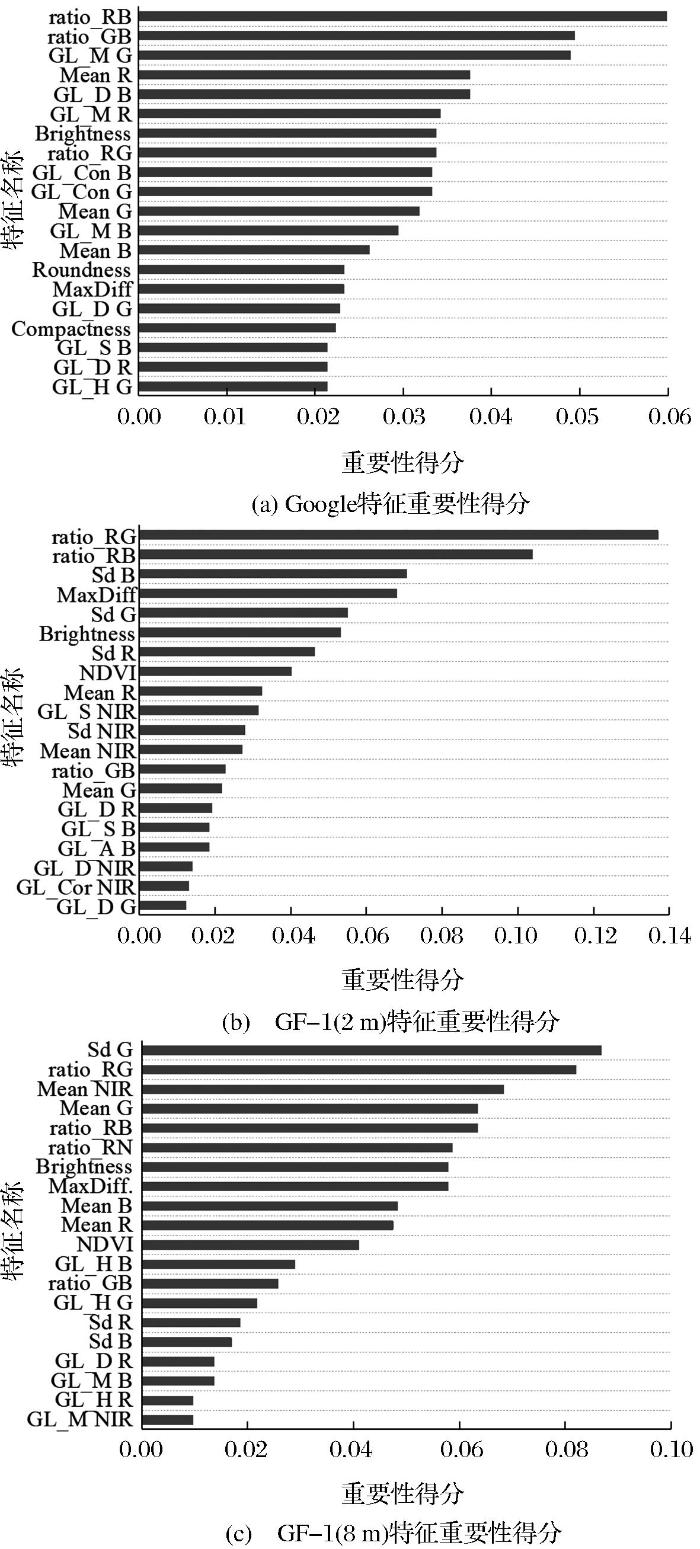
图4
不同分辨率影像特征重要性分布
Fig.4
Feature importance distribution of images with different resolution
4.3 切沟提取与精度评价
根据上文所确定的影像分割结果和特征变量集合,利用随机森林模型分类,结果如表3所示。0.5 m分辨率的Google影像分类效果最佳,总体精度达到91.46%,切沟的制图精度和用户精度为95.58%和94.67%。切沟的光谱特征明显,纹理特征具有高一致性和低复杂性,明显不同于相邻地物,因此提取结果最准确。2 m分辨率GF-1影像分类总体精度87.01%,一方面源于分辨率的限制,另一方面由于影像拍摄时间在10月,沟谷地中的植被在光谱、纹理信息上与农用地相似,对分类结果造成影响。随着空间分辨率由0.5 m变化至8 m,切沟的分类精度逐渐降低,由于狭长地物更易与周围背景地物形成混合像元,长而窄的小型切沟在分辨率降低时易发生丢失现象。图5为3种分辨率遥感影像提取的沟缘线,0.5 m Google影像和2 m GF-1影像提取的沟缘线精度高,生产者精度和用户精度均达90%以上,提取结果与该塬区沟间地和沟谷地的分布情况一致,且不存在破碎斑块,切沟形态准确。8 m GF-1影像沟缘线提取精度在85%左右,存在少量破碎斑块,沟头基本被提取出来,大致形态较符合。
表3 Google影像和GF-1影像分类精度评价
Table 3
| 影像数据 | 沟谷地 | 农用地 | 建设用地 | 未利用地 | 总体精度/% | Kappa 系数 | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| 生产者精度/% | 用户 精度/% | 生产者精度/% | 用户 精度/% | 生产者 精度/% | 用户 精度/% | 生产者精度/% | 用户 精度/% | |||
| Google(0.5 m) | 95.58 | 94.67 | 93.55 | 72.50 | 84.52 | 94.67 | 95.58 | 98.18 | 91.46 | 0.87 |
| GF-1(2 m) | 90.4 | 93.57 | 89.04 | 70.27 | 78.26 | 75.00 | 89.04 | 79.27 | 87.01 | 0.77 |
| GF-1(8 m) | 82.90 | 85.14 | 85.45 | 58.75 | 77.02 | 82.60 | 82.90 | 85.14 | 81.56 | 0.72 |
图5
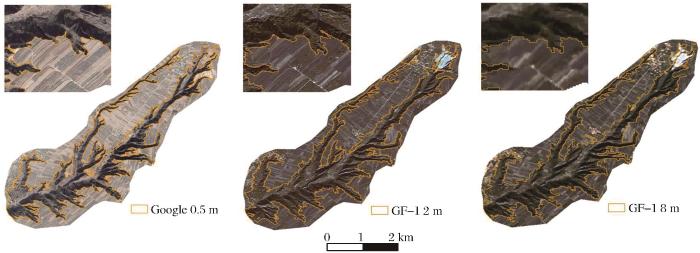
图5
Google影像和GF-1影像中提取的沟缘线
Fig.5
Gully boundary lines extracted from Google image and GF-1 image
4.4 切沟参数提取结果与精度评价
根据上文提取的沟缘线,选取30条典型切沟计算其形态参数,表4为这30条切沟形态参数的统计结果,从整体上看,随着影像分辨率的降低,切沟参数提取误差随之增大。结合切沟形态参数百分误差箱图(图6),可以看出,Google影像提取的切沟形态参数百分误差波动幅度最小,沟长和沟宽的百分误差仅在5%上下波动,面积百分误差集中在10%以下。2 m分辨率影像提取的沟长、面积、沟宽的平均百分误差分别为9.36%,12.25%和13.40%。通过0.5 m Google影像和2 m GF-1影像提取的切沟形态参数可以达到较高的精度,而8 m GF-1影像的提取结果不理想,切沟沟长、面积和沟宽的平均百分误差分别为18.82%、27.62%和18.93%。为提高从低分辨率影像中提取切沟形态特征指标的精度,并对研究区内的沟蚀特征进行深入分析,需要基于高分辨率遥感影像提取的切沟参数,构建低分辨率遥感影像提取切沟参数的转换模型。
表4 切沟形态参数统计结果
Table 4
| 参数 | 影像数据 | 均值/m | 中值/m | 最大值/m | 最小值/m | 平均绝对误差 | 平均百分误差/% |
|---|---|---|---|---|---|---|---|
| 沟长L/m | 无人机 | 126.18 | 109.05 | 317.14 | 22.60 | / | / |
| 124.44 | 106.73 | 317.41 | 20.23 | 4.28 | 5.35 | ||
| GF-1(2 m) | 119.79 | 99.49 | 333.04 | 20.82 | 10.82 | 9.36 | |
| GF-1(8 m) | 102.61 | 88.24 | 289.32 | 19.42 | 23.96 | 18.82 | |
| 面积A/m2 | 无人机 | 6 159.90 | 5 126.79 | 19 576.97 | 436.91 | / | / |
| 6 160.83 | 5 139.55 | 19 127.49 | 490.98 | 368.61 | 6.81 | ||
| GF-1(2 m) | 5 613.12 | 4 822.91 | 14 876.00 | 336.00 | 799.00 | 12.25 | |
| GF-1(8 m) | 4 320.01 | 3 024.05 | 13 964.34 | 358.14 | 1 853.21 | 27.62 | |
| 沟宽W/m | 无人机 | 42.86 | 44.07 | 72.86 | 19.33 | / | / |
| 43.01 | 44.51 | 67.88 | 20.21 | 2.26 | 5.22 | ||
| GF-1(2 m) | 42.59 | 43.27 | 67.72 | 16.13 | 5.33 | 13.40 | |
| GF-1(8 m) | 37.42 | 37.32 | 62.99 | 16.80 | 8.68 | 18.93 |
图6
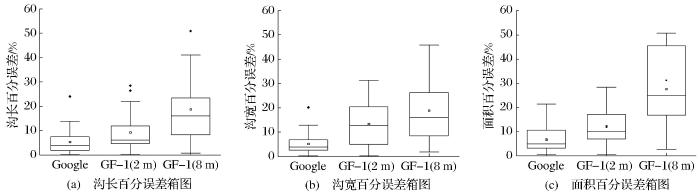
图6
Google影像和GF-1影像提取切沟形态参数百分误差箱图
Fig.6
Percentage error boxplots of gully morphological parameters extracted from Google image and GF-1 image
4.5 转换模型建立与验证
2 m分辨率影像的切沟提取结果较好,无需建立转换模型,而8 m分辨率影像提取的切沟形态特征指标精度较低,难以开展切沟侵蚀特征的研究,因此本文基于0.5 m Google影像提取的切沟形态参数,尝试建立8 m GF-1影像提取的切沟形态参数的转换模型。对于上述30条切沟,随机选择20条构建模型。Google影像提取的切沟长度(L)、面积(A)与GF-1(8 m)影像提取的切沟长度(L')、面积(A')建立的转换模型如图7(a)、7(b)所示,L=1.22L'-0.28(R2=0.896),A=1.44A'+31.56(R2=0.916),表明两个模型转换效果较好。图7(c)、7(d)为采用交叉验证的方法用剩余的10条切沟对转换模型进行有效性验证,其中决定系数(R2)分别为0.940和0.919,有效性系数(E)分别为0.944和0.927,且通过了显著性检验,两个转换模型均具有较高的预测精度。
图7
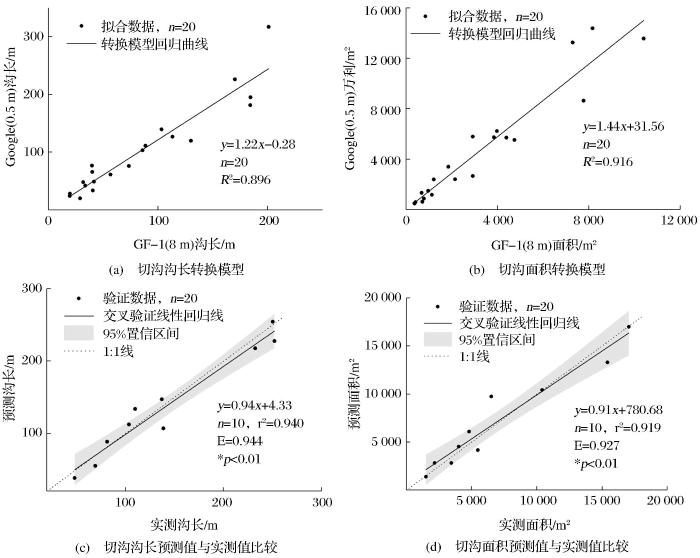
图7
切沟沟长和面积转换模型建立与验证
Fig.7
Simulation and validation of gully length and area conversion model
5 讨 论
以往研究表明随着影像分辨率的降低,提取切沟特征的精度也随之降低,5 m分辨率的数据难以准确识别切沟的边界,而确定精确的切沟边界需要空间分辨率为0.5 m左右的数据源[9]。2 m分辨率影像能清晰识别冲沟和切沟[13]。面向对象分析方法和随机森林分类算法相结合可以显著提高切沟提取精度,Liu等[24]从1 m DEM和Worldview-3影像中提取切沟的精度为93%。本文的研究结果与上述研究基本一致,其中0.5 m和2 m分辨率影像切沟自动提取精度可达90%以上,切沟形态准确,而8 m分辨率遥感影像提取切沟的精度为85%左右,沟缘线走向大致与实际相符,但提取的切沟边界较粗糙。0.5 m分辨率Google影像提取的切沟参数的误差在10%以内,2 m分辨率GF-1影像提取的误差在13%左右,8 m分辨率遥感影像计算出的切沟参数误差较大,但通过尺度转换方法建立高低分辨率影像提取切沟参数的转换模型,可以达到较好的转换效果。吴红艳等[29]则是采用0.1 m和5 m分辨率的DEM影像作为数据源,建立了两种分辨率DEM提取切沟形态特征参数的转换模型。两个研究都表明适当的转换模型,能够弥补高分辨率遥感影像数据缺乏的问题,同时,能够提高效率,更适合较大区域切沟侵蚀监测。
本研究表明利用面向对象和随机森林算法能够实现较高精度的切沟自动提取,显著提高了大范围切沟提取效率。但在后续研究中仍需在以下方面进行改进:①植物生长季的影像会导致地物间光谱特、纹理特征不清楚,容易产生误差。遥感影像空间分辨率以及配准精度也是导致误差的原因。②各种特征变量对分类精度的具体影响机制,还有待于进一步深入探索。③黄土高塬沟壑区,正负两大地貌单元分界明显,有利于切沟提取,但黄土丘陵沟壑区地貌复杂,本文提出的切沟参数提取方法和转换模型能否适用于黄土高原其它区域还有待进一步的探讨。
6 结 论
以黄土残塬沟壑区中垛塬为研究区,以无人机测量数据为对照,利用面向对象影像分析方法和随机森林分类算法自动提取切沟,分析了3种分辨率卫星影像提取切沟形态特征参数的精度,得到如下结论:
(1) 利用随机森林算法评估特征的重要性,对特征变量进行重要性排序和筛选,依据特征类别排序如下:光谱特征>纹理特征>几何特征。
(2) 0.5 m和2 m分辨率影像切沟分类精度较高,生产者精度和用户精度均达90%以上,切沟形态准确。基于8 m分辨率影像提取切沟的生产者精度和用户精度在85%左右,但切沟形态大致符合实际。
(3) 根据切沟形态参数的统计结果可知,随着遥感影像空间分辨率的降低,切沟参数提取误差随之增大。0.5 m和2 m分辨率影像提取的切沟沟长、面积和沟宽的百分误差分别在10%以内和13%左右;8 m分辨率影像提取的切沟沟长、面积和沟宽的平均百分误差为18.82%、27.62%和18.93%。
(4) 基于0.5 m分辨率Google影像提取的切沟形态特征参数,建立8 m分辨率GF-1影像提取的切沟沟长转换模型L = 1.22L'- 0.28(R2 =0.896)和面积转换模型A = 1.44A'+ 31.56(R2 =0.916),显著性p值均小于0.01,转换结果具有较高的精度。
参考文献
Evaluating gully erosion using 137Cs and 210Pb /137Cs ratio in a catchment
[J].
Advances and prospects for gully erosion researches
[J].
切沟侵蚀研究进展与展望
[J].
Interpretation of satellite imagery for delineation of ravines
[J].
Gully erosion mapping using object-based and pixel-based image classification methods
[J].
Give me the dirt: detection of gully extent and volume using high-resolution LiDAR
[C]∥ Jones S,Reinke K.
Object-based gully feature extraction using high spatial resolution imagery
[J].
Machine learning paradigms in high-resolution remote sensing image interpretation
[J].
高分辨率遥感影像解译中的机器学习范式
[J].
Identification of typical land features in the Lijiang River basin with fusion optics and radar
[J].
基于GF-1和Sentinel-1A的漓江流域典型地物信息提取
[J].
Quantifying temporal chan-ges in gully erosion areas with object oriented analysis
[J].
A semi-automated object-based gully networks detection using different machine learning models: A case study of bowen catchment, Queensland,Australia
[J].
Comparison of differences in resolution and sources of controlling factors for gully erosion susceptibility mapping
[J].
Mapping permanent gullies in an agricultural area using satellite images: Efficacy of machine learning algorithms
[J].
Analysis of erosion gully information extraction based on multi-resource remote sensing images
[J].
多源遥感影像的侵蚀沟信息提取分析
[J].
A review on the methodology of scale issues in quantitative remote sensing
[J].
定量遥感尺度转换方法研究进展
[J].
LAI measuring data processing, analysis and spatial scaling in the middle reaches of Heihe experimental research region
[J].
黑河中游试验区不同分辨率LAI数据处理、分析和尺度转换
[J].
Review of solar-induced chlorophyll fluorescence retrieval methods from satellite data
[J].
太阳诱导叶绿素荧光的卫星遥感反演方法研究进展
[J].
Spatial downscaling of land surface temperature with the multi-scale geographically weighted regression
[J].
多尺度地理加权回归的地表温度降尺度研究
[J].
The variability in soil water storage on the loess hillslopes in China and its estimation
[J].
A tentative classification of landforms in the Loess Plateau
[J].
划分晋西、陕北、陇东黄土区域沟间地与沟谷的地貌类型
[J].
A review of gully erosion process research
[J].
沟蚀过程研究进展
[J].
Automated parameterisation for multi-scale image segmentation on multiple layers
[J].
Accuracy assessment measures for object-based image segmentation goodness
[J].
An object-based approach for two-level gully feature mapping using high-resolution DEM and imagery: A case study on hilly Loess Plateau region, China
[J].
Random forests
[J].
Evaluation of different machine learning methods and deep-learning convolutional neural networks for landslide detection
[J].
Error assessment of extracting morphological parameters of bank gullies by manual visual interpretation based on QuickBird imagery
[J].
QuickBird影像目视解译法提取切沟形态参数的精度分析
[J].
Detection of catchment-scale gully-affected areas using Unmanned Aerial Vehicle (UAV) on the Chinese Loess Plateau
[J].
Transformation of gully morphological characteristic indicators extracted from DEMs of different resolution
[J].
不同分辨率DEM提取切沟形态特征参数的转化研究
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}