1 引 言
遥感成像技术和空间信息技术的飞速发展为对地观测提供了数据量庞大的多源遥感影像,而影像配准是综合利用多源影像实现优势集成的先决条件之一。影像配准是将不同时间、不同视角、不同传感器下获取的同一场景的多幅影像进行对齐和叠加的过程[1 ] ,从而获得更加全面的影像信息。在遥感领域,影像配准已广泛应用于影像融合、变化检测、三维重建、遥感信息提取与分析等多个领域。
目前主流的多源遥感影像配准方法大致分为两类:基于灰度的配准方法[2 -3 ] 和基于特征的配准方法[4 -5 ] 。基于灰度的配准方法通过优化相似性测度来确定多源影像之间的空间变换模型。互信息(Mutual Information,MI)是这类方法中最受欢迎的方法[6 -7 ] ,其通过计算两个未配准影像之间的MI以克服不同传感器之间较大的灰度差异。互信息方法对局部几何变形具有鲁棒性,但其在计算成本、旋转和尺度变化方面存在较大局限性。除此之外,基于灰度的配准方法还引入基于马尔科夫随机场的非参数化配准模型[8 ] ,并且同时考虑了灰度和梯度统计信息,从而满足微分同胚保持影像的拓扑结构。与基于灰度的配准方法不同,基于特征的配准方法利用空间结构或不变特征描述符来识别多源影像之间的同名点。由于具有对影像遮挡不敏感、计算成本低及配准精度高等优势,基于特征的配准方法更适合配准多源影像,因此也逐渐成为遥感影像配准领域的研究重点。
近年来,学者们在基于特征的影像配准研究中取得了许多重大成果。Lowe[9 ] 通过引入尺度空间提出一种尺度不变特征变换方法(Scale Invariant Feature Transform,SIFT),该方法具有良好的抗尺度变化、光照变化及噪声干扰能力,开启了基于特征配准影像的新纪元。由于多源影像间较大的非线性辐射差异易造成梯度信息不稳定,利用梯度特征信息的SIFT方法不再适用于配准多源影像。因此,许多研究提出了不同的SIFT改进方法。UR-SIFT方法是一种统一鲁棒的尺度不变特征方法[10 ] ,该方法采用基于熵的特征选择策略获取分布均匀的特征点。OS-SIFT方法使用两种不同的运算符计算光学和SAR影像的一致梯度以提高特征点的可重复性[11 ] 。后来相位一致性(Phase Congruency,PC)特征因其更好的光照和对比度不变性被广泛应用于多源影像配准。叶沅鑫等[12 ] 综合利用PC特征的强度和方向信息建立了一种表示影像间几何结构相似性的匹配测度,该方法能够较好地适应光学和SAR影像间显著的非线性辐射变化,但却不具有旋转和尺度不变性。李东宸等[13 ] 通过结合PC强度信息和引导尺度空间网格划分提取均匀分布的特征点,并利用PC幅值和方向构建稳定的描述符,该方法对光学和SAR影像配准具有较高的普适性。Wang等[14 ] 基于PC多矩特征图提取均匀分布的特征点,并结合多尺度最大方向索引图和PC方向构建了鲁棒的特征描述符,能够很好地抵抗光学和SAR影像之间的非线性辐射差异和强散斑噪声。
相比于多源中低分辨率影像,多源高分辨率影像不仅存在较大的非线性辐射差异和局部几何失真,而且还具有更复杂的细节和纹理信息,这将对特征匹配造成干扰,进而导致难以获取大量均匀分布的同名点。为了解决上述问题,本文面向细节纹理信息丰富的多源高分辨率影像,提出一种基于边缘特征的自动配准方法,并将其应用于不同传感器的光学与光学、光学与SAR及光学与红外等多源影像配准。所提方法一方面通过构造边缘特征图的非线性尺度空间结合分块策略提取特征点,另一方面使用MOIM特征图构造一种改进的GLOH描述子,最终实现了多源高分辨率影像的高精度配准。
2 扩展相位一致性模型
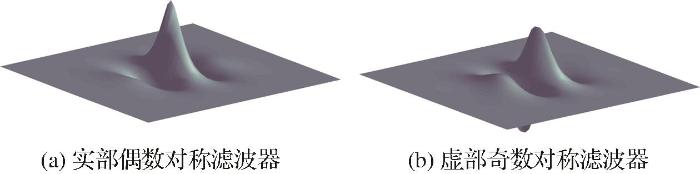
相位一致性是一种基于频率域的特征检测模型,其在傅里叶分量相位最大的位置感知特征。Morrone等[15 ] 首次使用相位一致性提取影像的局部特征,并证明了其对光照和对比度变化具有不变性。后来Kovesi[16 ] 对相位一致性计算模型进行扩展,利用定位性能良好的Log-Gabor小波对影像进行卷积运算得到局部相位信息。扩展相位一致性(P C 2
P C 2 x , y = ∑ s ∑ o W o x , y A s , o x , y Δ φ s , o x , y - T ∑ s ∑ o A s , o x , y + ε
其中:s , o W o T ε ⋅ Δ φ s , o A s , o s o
A s , o x , y = E s , o x , y 2 + O s , o x , y 2
其中:E s , o O s , o 图1 所示。
图1
图1
Log-Gabor小波基本形状
Fig.1
The shape of Log-Gabor filter
根据矩分析方法[17 ] 可知,扩展相位一致性最大矩能够反映影像的边缘强度特性,从而具有较好的边缘特征表达能力。扩展相位一致性最大矩M ψ
M ψ = 1 2 a + c + b 2 + a - c 2
其中:a b c P C 2 θ o
a = ∑ o P C 2 θ o c o s θ o 2
b = 2 ∑ o P C 2 2 θ o c o s θ o s i n θ o
c = ∑ o P C 2 θ o s i n θ o 2
3 基于边缘特征的多源影像配准
3.1 特征检测
现有的特征检测器通常基于高斯尺度(DoG)空间的差异提取特征点,但是该方法应用于多源影像时存在可重复性差且分布不均匀的问题。Perona等[18 ] 首次在尺度空间中引入各向异性扩散滤波,该过程利用连续的迭代运算实现影像每一尺度边缘区域的精确定位。各向异性扩散滤波是一种非线性滤波,它可以更好地保留影像边缘信息,方便影像结构特征提取,一定程度上增加特征点的丰富程度。影像I
∂ L ∂ t = d i v 1 1 + ∇ L σ / k 1 2 ∇ L L n + 1 = I - τ ∑ i = 1 m A i L n - 1 L n (7)
其中:d i v ∇ L 1 1 + ∇ L σ / k 1 2 τ ( t n + 1 - t n ) L n + 1 n + 1 σ n t n
t n = 1 2 σ n 2 = 1 2 σ 0 ⋅ k 2 n 2 , n ∈ 0 , . . . , N - 1 (8)
其中:σ 0 k 2 2 1 / 3 N
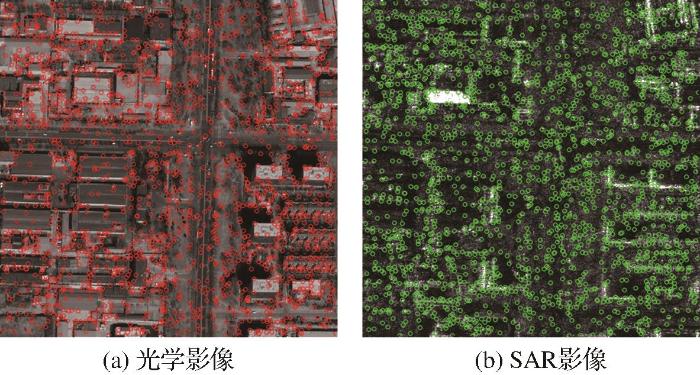
在多源高分辨率影像中,边缘特征具有很高的相似性和较强的抗辐射差异能力,所以在边缘特征图上提取特征点可以确保特征数量充足。此外,受局部几何失真的影响,提取到的特征点会出现分布不均匀的现象,这将极大地降低后续影像配准的精度。因此,在构建非线性尺度空间基础上,本文基于分块策略利用FAST特征检测器在边缘特征图上提取均匀分布的特征点。具体步骤为:
(1) 计算输入影像的扩展相位一致性最大矩得到边缘特征图,将边缘特征图与标准差为σ 0
(2) 将尺度空间的当前层划分为N h × N v
(3) 利用公式(7)生成尺度空间的下一层,并继续执行步骤(2)提取特征点。
(4) 当尺度空间的层数达到最大值N 时,停止特征提取。此时,去除重复和弱响应的特征点,得到均匀分布的特征点。
图2
图2
特征提取结果
Fig.2
The result of feature extraction
3.2 特征描述
特征描述子的鲁棒性和独特性是建立两幅影像之间正确对应关系的关键。基于索引图生成特征描述子的方法已被证明对于非线性辐射差异具有不变性[19 -20 ] 。因此,实验利用主方向索引图(MOIM)构建一种新颖的特征描述子。MOIM是由多尺度多方向的Log-Gabor小波的卷积序列进行构造的,其与输入影像具有相同的尺寸大小。对于给定的影像I x , y
(1) 利用Log-Gabor小波进行卷积运算以获取偶数对称滤波器响应值E s , o O s , o
(2) 使用公式(2)计算尺度s o A s , o N s A o
A o x , y = ∑ s = 1 N s A s , o x , y (9)
(3) 将N o ω A o ω x , y 1 N o , ω = 1.2 , . . . , N o x , y ω m a x
ω m a x x , y = a r g m a x A o ω x , y o = 1 N o (10)
M O I M x , y = ω m a x x , y (11)
在构造MOIM后,确定特征点的邻域用于构建描述子。为了使描述子对几何畸变具有不变性,使用高斯滤波对邻域内不同位置像素分配不同的权重,使得靠近特征点的像素信息比远离特征点的像素信息对描述子的贡献更大。因此,实验对MOIM特征图进行高斯加权以增加其区分性,并且构建一种类似GLOH的描述子。将特征点的局部区域划分为20个子区域,其中最靠近特征点的内圆子区域由原来的1个等分为4个,这样不仅实现内圆子区域与其他子区域具有相似大小的采样区域,而且解决了GLOH描述符内圆子区域对局部几何失真不鲁棒的问题。本文描述子构建过程如图3 所示。
图3
图3
描述子构建过程
Fig.3
The process of descriptor construction
3.3 特征匹配
在构建特征描述子后,选择合适的相似性度量进行特征匹配以识别同名点。欧式距离是特征匹配中最常用的相似性度量,但是由于其无法同时兼顾较大特征值和较小特征值易产生很多的误匹配,所以难以适用于非线性辐射差异更加明显的多源影像。因此,本文利用鲁棒性更好的巴氏距离代替欧氏距离来衡量多源影像上特征点的相似性,其计算公式如下:
D B X , Y = ∑ i = 1 n x i y i (12)
然后,利用Flann匹配技术得到初始匹配点对,并使用FSC方法[21 ] 剔除外点,得到最终的同名点对。最后,根据这些准确的同名点对迭代计算两幅影像的仿射变换模型参数,实现多源影像的高精度配准。
4 实验与分析
4.1 实验细节
为验证本文方法的有效性,选择两种新颖的PSO-SIFT[22 ] 和LGHD的配准方法与本文方法进行比较,并采用正确匹配数量(NCM)、分布质量(DQ)、均方根误差(RMSE)和计算耗时(T)4种指标进行定量评估,其中分布质量和均方根误差分别利用公式(13)和公式(14)计算。上述方法都在MATLAB R2016b平台下实现,实验环境为Inter(R) Core(TM) i7-6500U CPU @ 2.50 GHz,RAM是8 GB。
D A = ∑ i = 1 m A i A ¯ - 1 2 m - 1 , A ¯ = ∑ i = 1 m A i m D S = ∑ i = 1 m S i - 1 2 m - 1 , S i = 3 ⋅ M a x J i π D Q = D A ⋅ D S = ∑ i = 1 m A i A ¯ - 1 2 ⋅ ∑ i = 1 m S i - 1 2 m - 1 (13)
R M S E = 1 N ∑ i = 1 N p i ' - p i 2 (14)
其中:m A i J i i N N = 30
针对本文提出的多源高分辨率影像配准方法,选取如图4 所示的4组不同类型传感器获取的多源影像进行配准实验,其中第一行表示参考影像,第二行表示待配准影像。这些影像分别覆盖了城市、工厂、农田和郊区等不同的场景,并且每组影像中参考影像和待配准影像具有不同的时相和空间分辨率。第一组影像的参考影像和待配准影像分别是Google Earth影像和GF-2全色影像,对应的空间分辨率分别为1.2 m/像素和0.8 m/像素,其大小均为800×800像素;第二组影像的参考影像和待配准影像分别为Google Earth影像和ZY-3全色影像,对应的空间分辨率分别为2.1 m/像素和2.1 m/像素,其大小分别为800×800像素和900×900像素;第三组影像的参考影像和待配准影像分别是Google Earth影像和TerraSAR-X影像,对应的空间分辨率均为1 m/像素,其大小均为512×512像素;第四组影像的参考影像和待配准影像分别是光学影像和红外影像,对应的空间分辨率均为0.5 m/像素,其大小均为600×600像素。其中,第三组影像和第四组影像分别来自文献[23 ]和文献[24 ],其大小均为512×512像素。
图4
图4
实验影像对
Fig.4
Experimental image pairs
此外,为了验证所提方法对较大尺寸影像,尤其是整景影像的配准性能,本文选择两组整景的多源影像进行测试。实验将每组测试影像分为整景和局部两种尺度大小,其中局部区域影像来自整景影像。第一组为光学与光学影像,其参考影像为ZY-3全色影像,待配准影像为GF-1全色影像,对应的空间分辨率分别为2.1 m/像素和2.0 m/像素。第二组为光学与SAR影像,其参考影像为Google Earth影像红波段,待配准影像为C频的Airborne SAR影像,对应的空间分辨率分别为0.6 m/像素和0.4 m/像素。
4.2 实验结果与分析
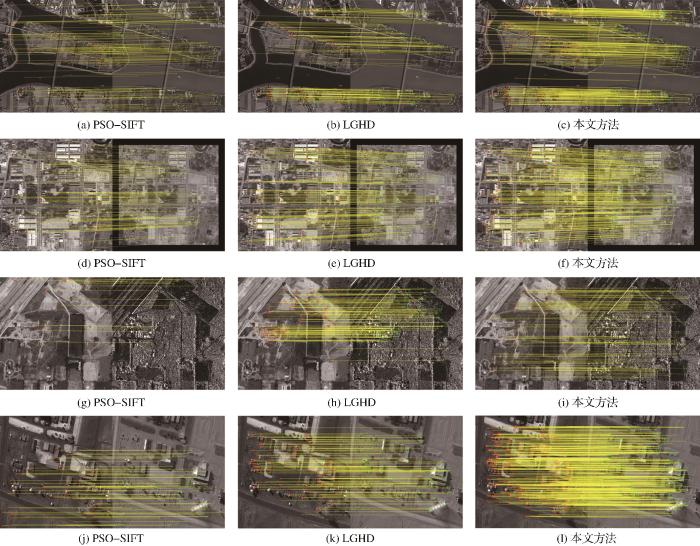
4组影像的匹配结果如图5 所示,其中第一列至第三列分别表示PSO-SIFT方法、LGHD方法和本文方法的匹配结果。由图6 可知,PSO-SIFT方法在不同传感器的高分辨率光学影像(图5 (a)、图5 (d)及图5 (j))和高分辨率光学与红外影像中都能成功匹配,但是在高分辨率光学与SAR影像中匹配效果较差(图5 (g)),仅获取了少量的同名点,并且这些同名点集中在某一区域造成分布不均匀,进而影响后续影像的配准精度。LGHD方法在所有的4组不同类型传感器的多源影像中都能完成正确匹配,但是在高分辨率光学和SAR影像中获取同名点难度较大而造成匹配效果不佳(图5 (h)),并且仍然存在同名点分布不均匀的问题。与上述两种方法不同,本文方法对于4组影像都实现了成功匹配,并且能够识别数量充足且分布均匀的同名点。综上所述,在3种方法中,本文方法对于4组不同类型传感器的多源影像始终都能获取最佳的匹配效果,并且获取的同名点在数量和分布方面都是最优的。
图5
图5
三种方法的匹配结果对比
Fig.5
Comparison of the matching results of three methods
图6
图6
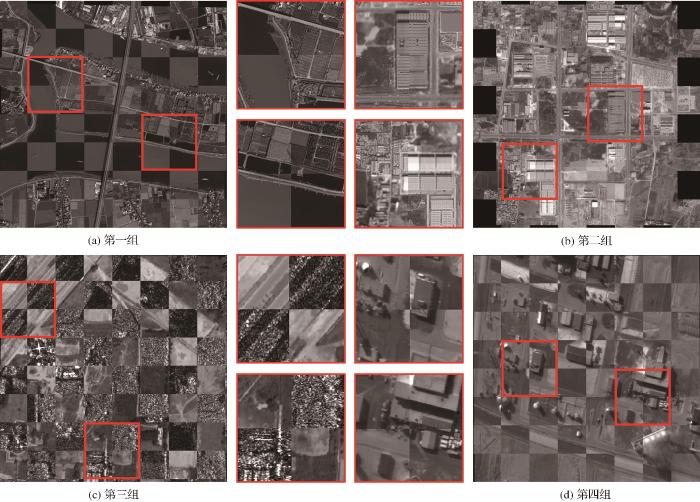
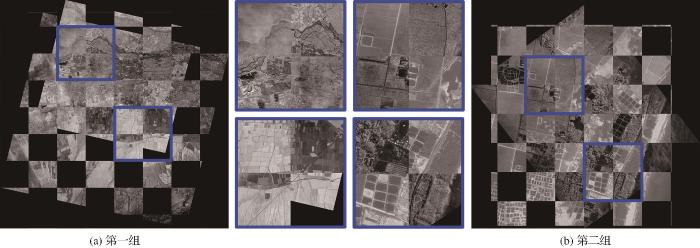
本文方法配准结果的棋盘格镶嵌及局部放大图
Fig.6
Checkerboard mosaic images and enlarged sub-images of registration results of our method
图6 显示了本文方法在4组不同类型传感器的多源影像中配准结果的棋盘格融合及局部放大图。从图6 可以看出,本文方法能够克服光学与光学、光学与SAR及光学与红外等形式的多源影像间的非线性辐射差异和局部几何变形,在4组影像中均获取了较好的配准效果。同时,通过局部放大图可以表明,在每个棋盘格融合图中相邻的子区域具有良好的连续性,这表明使用本文方法配准多源高分辨率影像是有效的,并且能够获取较高的配准精度。
表1 是3种方法的配准结果对比。由表1 可知,相比于其他两种方法,本文方法在正确匹配数量、分布质量和均方根误差3个评价指标中始终都表现出最佳的配准效果,并且除第一组影像外,本文方法在所有3种方法中均是计算耗时最短。对于前两组光学与光学多源影像的配准,本文方法获取的正确匹配数量是其他两种方法的2—3倍,且均方根误差均优于1个像素。对于存在较大非线性辐射差异和强噪声的第三组光学与SAR多源影像,PSO-SIFT方法因其较少的同名点造成较差的配准效果,LGHD方法也因其同名点分布质量差而导致配准结果不佳,但是本文方法仍然能够获取足量均匀分布的同名点,其配准结果的均方根误差也接近1.3个像素。对于第4组亚米级空间分辨率的光学与红外多源影像,3种方法均获取了数量充足且均匀分布的同名点,其中本文方法配准结果的均方根误差达到0.6个像素。因此,本文方法对于多源高分辨率影像间较大的非线性辐射差异和局部几何变形具有鲁棒性,并得到较高的配准精度。
表2 是本文方法在大尺寸多源影像上的配准结果。由表2 可知,本文方法在两组大尺寸局部多源影像上都获取了较好的配准精度,同时在计算耗时方面也较为理想。而对于两组整景的多源影像,由于受到较大非线性辐射差异和几何畸变的干扰,本文方法配准性能有所下降,但是平均配准精度仍然优于1.5个像素,能够满足实际应用的要求。其中,第一组整景的光学与光学影像配准结果的均方根误差低于1.4个像素,且耗时约为33 min;第二组整景的光学与SAR影像配准结果的均方根误差低于1.6个像素,且耗时约为12 min。图7 (a)和图7 (b)分别为第一组和第二组整景多源影像配准结果的棋盘格融合及局部放大图。
图7
图7
整景影像配准结果的棋盘格镶嵌及局部放大图
Fig.7
Checkerboard mosaic images and enlarged sub-images of registration results of whole scene images
5 结 论
本文提出了一种基于边缘特征的影像配准方法,旨在解决多源遥感影像间配准困难的问题。所提方法从特征检测和特征描述入手,通过结合非线性扩散滤波和扩展相位一致性模型进行多尺度特征检测,并采用基于Log-Gabor滤波生成的MOIM特征图构建鲁棒特征描述子。实验结果表明,该方法对非线性辐射差异和局部几何畸变具有鲁棒性,可以有效提高多源高分辨率影像间的配准精度。同时,该方法在大幅面的多源高分辨率遥感影像上也获得了较好的配准效果,普适性较高。
然而,该方法在应对稀疏纹理场景时不能稳定识别出影像间共有结构特征,配准效果还不够理想。鉴于深度卷积神经网络具有强大的特征提取和表达能力,在未来的工作中,将通过构建端到端的深度卷积神经网络模型来实现多源遥感影像稳健配准。
参考文献
View Option
[2]
Xiang Y Jiao N Wang F et al A robust two-stage registration algorithm for large optical and SAR images
[J]. IEEE Transactions on Geoscience and Remote Sensing ,2021 ,60 :1 -15 . DOI: 10.1109/TGRS.2021.3133863 .
[本文引用: 1]
[3]
Li Z Yue J Fang L Adaptive regional multiple features for large-scale high-resolution remote sensing image registration
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2022 , 60 :1 -13 . DOI: 10.1109/TGRS.2022.3141101 .
[本文引用: 1]
[4]
Ye Y Zhu B Tang T et al A robust multimodal remote sensing image registration method and system using steerable filters with first-and second-order gradients
[J]. ISPRS Journal of Photogrammetry and Remote Sensing ,2022 ,188 :331 -350 . DOI: 10.1016/j.isprsjprs.2022.04.011 .
[本文引用: 1]
[5]
Yao Y Zhang Y Wan Y et al Multi-modal remote sensing image matching considering co-occurrence filter
[J]. IEEE Transactions on Image Processing ,2022 ,31 :2584 -2597 . DOI: 10.1109/TIP.2022.3157450 .
[本文引用: 1]
[6]
Suri S Reinartz P Mutual-information-based registration of TerraSAR-X and Ikonos imagery in urban areas
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2009 , 48 (2 ):939 -949 . DOI: 10.1109/TGRS.2009.2034842 .
[本文引用: 1]
[7]
Zhuang Y Gao K Miu X et al Infrared and visual image registration based on mutual information with a combined particle swarm optimization–Powell search algorithm
[J]. Optik , 2016 , 127 (1 ):188 -191 . DOI: 10.1016/j.ijleo.2015.09.199 .
[本文引用: 1]
[8]
Yan Li Wang Ziqi Ye Zhiyun Multimodal image registration algorithm considering grayscale and gradient information
[J]. Acta Geodaetica et Cartographica Sinica , 2018 , 47 (1 ):71 -81 .
[本文引用: 1]
闫利 , 王紫琦 , 叶志云 顾及灰度和梯度信息的多模态影像配准算法
[J].测绘学报 , 2018 , 47 (1 ):71 -81 .
[本文引用: 1]
[10]
Sedaghat A Mokhtarzade M Ebadi H Uniform robust scale-invariant feature matching for optical remote sensing images
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2011 ,49 (11 ):4516 -4527 . DOI:10.1109/TGRS.2011.2144607 .
[本文引用: 1]
[11]
Xiang Y Wang F You H OS-SIFT: A robust SIFT-like algorithm for high-resolution optical-to-SAR image registration in suburban areas
[J]. IEEE Transactions on Geoscience and Remote Sensing ,2018 ,56 (6 ):3078 -3090 . DOI:10.1109/TGRS.2018.2790483 .
[本文引用: 1]
[12]
Ye Yuanxin Hao Siyuan Cao Yungang Automatic registration of optical and SAR image using geometric structural properties
[J]. Journal of Infrared and Millimeter Waves , 2017 , 36 (6 ):720 -726 .
[本文引用: 1]
叶沅鑫 , 郝思媛 , 曹云刚 基于几何结构属性的光学和SAR影像自动配准
[J]. 红外与毫米波学报 , 2017 , 36 (6 ):720 -726 .
[本文引用: 1]
[13]
Li Dongchen Xiang Wenhao Dang Qiannan et al SAR and optical images registration using uniform distribution and structure description based ASIFT
[J].Acta Geodaetica et Cartogra-phica Sinica ,2020 ,49 (12 ):1583 -1590 .
[本文引用: 1]
李东宸 ,向文豪 ,党倩楠 , 等 均匀分布与结构描述ASIFT相结合的SAR与可见光图像配准算法
[J]. 测绘学报 ,2020 ,49 (12 ):1583 -1590 .
[本文引用: 1]
[14]
Wang L Sun M Liu J et al A robust algorithm based on phase congruency for optical and SAR image registration in suburban areas
[J]. Remote Sensing ,2020 ,12 (20 ):3339 . DOI: 10.3390/rs12203339 .
[本文引用: 1]
[16]
Kovesi P Image features from phase congruency
[J]. Videre: Journal of Computer Vision Research ,1999 ,1 (3 ):1 -26 .
[本文引用: 1]
[17]
Horn B Klaus B Horn P Robot vision [M]. New York :McGraw-Hill Higher Education ,1986 .
[本文引用: 1]
[18]
Perona P Malik J Scale-space and edge detection using anisotropic diffusion
[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 1990 , 12 (7 ):629 -639 . DOI: 10.1109/34.56205 .
[本文引用: 1]
[19]
Fu Z Qin Q Luo B et al HOMPC: A local feature descriptor based on the combination of magnitude and phase congruency information for multi-sensor remote sensing images
[J]. Remote Sensing ,2018 ,10 (8 ):1234 . DOI:10.3390/rs10081234 .
[本文引用: 1]
[20]
Li J Hu Q Ai M RIFT: Multi-modal image matching based on radiation-variation insensitive feature transform
[J]. IEEE Transactions on Image Processing ,2019 ,29 :3296 -3310 . DOI: 10.1109/TIP.2019.2959244 .
[本文引用: 1]
[21]
Wu Y Ma W Gong M et al A novel point-matching algorithm based on fast sample consensus for image registration
[J]. IEEE Geoscience and Remote Sensing Letters , 2014 , 12 (1 ):43 -47 . DOI: 10.1109/LGRS.2014.2325970 .
[本文引用: 1]
[22]
Ma W Wen Z Wu Y et al Remote sensing image registration with modified SIFT and enhanced feature matching
[J]. IEEE Geoscience and Remote Sensing Letters ,2016 ,14 (1 ):3 -7 . DOI: 10.1109/LGRS.2016.2600858 .
[本文引用: 1]
[23]
Xiang Y Tao R Wang F et al Automatic registration of optical and SAR images via improved phase congruency model
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing ,2020 ,13 :5847 -5861 . DOI: 10.1109/JSTARS.2020.3026162 .
[本文引用: 1]
[24]
Ye Y Bruzzone L Shan J et al Fast and robust matching for multimodal remote sensing image registration
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2019 , 57 (11 ):9059 -9070 . DOI: 10.1109/TGRS.2019.2924684 .
[本文引用: 1]
Image registration methods: A survey
1
2003
... 遥感成像技术和空间信息技术的飞速发展为对地观测提供了数据量庞大的多源遥感影像,而影像配准是综合利用多源影像实现优势集成的先决条件之一.影像配准是将不同时间、不同视角、不同传感器下获取的同一场景的多幅影像进行对齐和叠加的过程[1 ] ,从而获得更加全面的影像信息.在遥感领域,影像配准已广泛应用于影像融合、变化检测、三维重建、遥感信息提取与分析等多个领域. ...
A robust two-stage registration algorithm for large optical and SAR images
1
2021
... 目前主流的多源遥感影像配准方法大致分为两类:基于灰度的配准方法[2 -3 ] 和基于特征的配准方法[4 -5 ] .基于灰度的配准方法通过优化相似性测度来确定多源影像之间的空间变换模型.互信息(Mutual Information,MI)是这类方法中最受欢迎的方法[6 -7 ] ,其通过计算两个未配准影像之间的MI以克服不同传感器之间较大的灰度差异.互信息方法对局部几何变形具有鲁棒性,但其在计算成本、旋转和尺度变化方面存在较大局限性.除此之外,基于灰度的配准方法还引入基于马尔科夫随机场的非参数化配准模型[8 ] ,并且同时考虑了灰度和梯度统计信息,从而满足微分同胚保持影像的拓扑结构.与基于灰度的配准方法不同,基于特征的配准方法利用空间结构或不变特征描述符来识别多源影像之间的同名点.由于具有对影像遮挡不敏感、计算成本低及配准精度高等优势,基于特征的配准方法更适合配准多源影像,因此也逐渐成为遥感影像配准领域的研究重点. ...
Adaptive regional multiple features for large-scale high-resolution remote sensing image registration
1
2022
... 目前主流的多源遥感影像配准方法大致分为两类:基于灰度的配准方法[2 -3 ] 和基于特征的配准方法[4 -5 ] .基于灰度的配准方法通过优化相似性测度来确定多源影像之间的空间变换模型.互信息(Mutual Information,MI)是这类方法中最受欢迎的方法[6 -7 ] ,其通过计算两个未配准影像之间的MI以克服不同传感器之间较大的灰度差异.互信息方法对局部几何变形具有鲁棒性,但其在计算成本、旋转和尺度变化方面存在较大局限性.除此之外,基于灰度的配准方法还引入基于马尔科夫随机场的非参数化配准模型[8 ] ,并且同时考虑了灰度和梯度统计信息,从而满足微分同胚保持影像的拓扑结构.与基于灰度的配准方法不同,基于特征的配准方法利用空间结构或不变特征描述符来识别多源影像之间的同名点.由于具有对影像遮挡不敏感、计算成本低及配准精度高等优势,基于特征的配准方法更适合配准多源影像,因此也逐渐成为遥感影像配准领域的研究重点. ...
A robust multimodal remote sensing image registration method and system using steerable filters with first-and second-order gradients
1
2022
... 目前主流的多源遥感影像配准方法大致分为两类:基于灰度的配准方法[2 -3 ] 和基于特征的配准方法[4 -5 ] .基于灰度的配准方法通过优化相似性测度来确定多源影像之间的空间变换模型.互信息(Mutual Information,MI)是这类方法中最受欢迎的方法[6 -7 ] ,其通过计算两个未配准影像之间的MI以克服不同传感器之间较大的灰度差异.互信息方法对局部几何变形具有鲁棒性,但其在计算成本、旋转和尺度变化方面存在较大局限性.除此之外,基于灰度的配准方法还引入基于马尔科夫随机场的非参数化配准模型[8 ] ,并且同时考虑了灰度和梯度统计信息,从而满足微分同胚保持影像的拓扑结构.与基于灰度的配准方法不同,基于特征的配准方法利用空间结构或不变特征描述符来识别多源影像之间的同名点.由于具有对影像遮挡不敏感、计算成本低及配准精度高等优势,基于特征的配准方法更适合配准多源影像,因此也逐渐成为遥感影像配准领域的研究重点. ...
Multi-modal remote sensing image matching considering co-occurrence filter
1
2022
... 目前主流的多源遥感影像配准方法大致分为两类:基于灰度的配准方法[2 -3 ] 和基于特征的配准方法[4 -5 ] .基于灰度的配准方法通过优化相似性测度来确定多源影像之间的空间变换模型.互信息(Mutual Information,MI)是这类方法中最受欢迎的方法[6 -7 ] ,其通过计算两个未配准影像之间的MI以克服不同传感器之间较大的灰度差异.互信息方法对局部几何变形具有鲁棒性,但其在计算成本、旋转和尺度变化方面存在较大局限性.除此之外,基于灰度的配准方法还引入基于马尔科夫随机场的非参数化配准模型[8 ] ,并且同时考虑了灰度和梯度统计信息,从而满足微分同胚保持影像的拓扑结构.与基于灰度的配准方法不同,基于特征的配准方法利用空间结构或不变特征描述符来识别多源影像之间的同名点.由于具有对影像遮挡不敏感、计算成本低及配准精度高等优势,基于特征的配准方法更适合配准多源影像,因此也逐渐成为遥感影像配准领域的研究重点. ...
Mutual-information-based registration of TerraSAR-X and Ikonos imagery in urban areas
1
2009
... 目前主流的多源遥感影像配准方法大致分为两类:基于灰度的配准方法[2 -3 ] 和基于特征的配准方法[4 -5 ] .基于灰度的配准方法通过优化相似性测度来确定多源影像之间的空间变换模型.互信息(Mutual Information,MI)是这类方法中最受欢迎的方法[6 -7 ] ,其通过计算两个未配准影像之间的MI以克服不同传感器之间较大的灰度差异.互信息方法对局部几何变形具有鲁棒性,但其在计算成本、旋转和尺度变化方面存在较大局限性.除此之外,基于灰度的配准方法还引入基于马尔科夫随机场的非参数化配准模型[8 ] ,并且同时考虑了灰度和梯度统计信息,从而满足微分同胚保持影像的拓扑结构.与基于灰度的配准方法不同,基于特征的配准方法利用空间结构或不变特征描述符来识别多源影像之间的同名点.由于具有对影像遮挡不敏感、计算成本低及配准精度高等优势,基于特征的配准方法更适合配准多源影像,因此也逐渐成为遥感影像配准领域的研究重点. ...
Infrared and visual image registration based on mutual information with a combined particle swarm optimization–Powell search algorithm
1
2016
... 目前主流的多源遥感影像配准方法大致分为两类:基于灰度的配准方法[2 -3 ] 和基于特征的配准方法[4 -5 ] .基于灰度的配准方法通过优化相似性测度来确定多源影像之间的空间变换模型.互信息(Mutual Information,MI)是这类方法中最受欢迎的方法[6 -7 ] ,其通过计算两个未配准影像之间的MI以克服不同传感器之间较大的灰度差异.互信息方法对局部几何变形具有鲁棒性,但其在计算成本、旋转和尺度变化方面存在较大局限性.除此之外,基于灰度的配准方法还引入基于马尔科夫随机场的非参数化配准模型[8 ] ,并且同时考虑了灰度和梯度统计信息,从而满足微分同胚保持影像的拓扑结构.与基于灰度的配准方法不同,基于特征的配准方法利用空间结构或不变特征描述符来识别多源影像之间的同名点.由于具有对影像遮挡不敏感、计算成本低及配准精度高等优势,基于特征的配准方法更适合配准多源影像,因此也逐渐成为遥感影像配准领域的研究重点. ...
顾及灰度和梯度信息的多模态影像配准算法
1
2018
... 目前主流的多源遥感影像配准方法大致分为两类:基于灰度的配准方法[2 -3 ] 和基于特征的配准方法[4 -5 ] .基于灰度的配准方法通过优化相似性测度来确定多源影像之间的空间变换模型.互信息(Mutual Information,MI)是这类方法中最受欢迎的方法[6 -7 ] ,其通过计算两个未配准影像之间的MI以克服不同传感器之间较大的灰度差异.互信息方法对局部几何变形具有鲁棒性,但其在计算成本、旋转和尺度变化方面存在较大局限性.除此之外,基于灰度的配准方法还引入基于马尔科夫随机场的非参数化配准模型[8 ] ,并且同时考虑了灰度和梯度统计信息,从而满足微分同胚保持影像的拓扑结构.与基于灰度的配准方法不同,基于特征的配准方法利用空间结构或不变特征描述符来识别多源影像之间的同名点.由于具有对影像遮挡不敏感、计算成本低及配准精度高等优势,基于特征的配准方法更适合配准多源影像,因此也逐渐成为遥感影像配准领域的研究重点. ...
顾及灰度和梯度信息的多模态影像配准算法
1
2018
... 目前主流的多源遥感影像配准方法大致分为两类:基于灰度的配准方法[2 -3 ] 和基于特征的配准方法[4 -5 ] .基于灰度的配准方法通过优化相似性测度来确定多源影像之间的空间变换模型.互信息(Mutual Information,MI)是这类方法中最受欢迎的方法[6 -7 ] ,其通过计算两个未配准影像之间的MI以克服不同传感器之间较大的灰度差异.互信息方法对局部几何变形具有鲁棒性,但其在计算成本、旋转和尺度变化方面存在较大局限性.除此之外,基于灰度的配准方法还引入基于马尔科夫随机场的非参数化配准模型[8 ] ,并且同时考虑了灰度和梯度统计信息,从而满足微分同胚保持影像的拓扑结构.与基于灰度的配准方法不同,基于特征的配准方法利用空间结构或不变特征描述符来识别多源影像之间的同名点.由于具有对影像遮挡不敏感、计算成本低及配准精度高等优势,基于特征的配准方法更适合配准多源影像,因此也逐渐成为遥感影像配准领域的研究重点. ...
Distinctive image features from scale-invariant keypoints
1
2004
... 近年来,学者们在基于特征的影像配准研究中取得了许多重大成果.Lowe[9 ] 通过引入尺度空间提出一种尺度不变特征变换方法(Scale Invariant Feature Transform,SIFT),该方法具有良好的抗尺度变化、光照变化及噪声干扰能力,开启了基于特征配准影像的新纪元.由于多源影像间较大的非线性辐射差异易造成梯度信息不稳定,利用梯度特征信息的SIFT方法不再适用于配准多源影像.因此,许多研究提出了不同的SIFT改进方法.UR-SIFT方法是一种统一鲁棒的尺度不变特征方法[10 ] ,该方法采用基于熵的特征选择策略获取分布均匀的特征点.OS-SIFT方法使用两种不同的运算符计算光学和SAR影像的一致梯度以提高特征点的可重复性[11 ] .后来相位一致性(Phase Congruency,PC)特征因其更好的光照和对比度不变性被广泛应用于多源影像配准.叶沅鑫等[12 ] 综合利用PC特征的强度和方向信息建立了一种表示影像间几何结构相似性的匹配测度,该方法能够较好地适应光学和SAR影像间显著的非线性辐射变化,但却不具有旋转和尺度不变性.李东宸等[13 ] 通过结合PC强度信息和引导尺度空间网格划分提取均匀分布的特征点,并利用PC幅值和方向构建稳定的描述符,该方法对光学和SAR影像配准具有较高的普适性.Wang等[14 ] 基于PC多矩特征图提取均匀分布的特征点,并结合多尺度最大方向索引图和PC方向构建了鲁棒的特征描述符,能够很好地抵抗光学和SAR影像之间的非线性辐射差异和强散斑噪声. ...
Uniform robust scale-invariant feature matching for optical remote sensing images
1
2011
... 近年来,学者们在基于特征的影像配准研究中取得了许多重大成果.Lowe[9 ] 通过引入尺度空间提出一种尺度不变特征变换方法(Scale Invariant Feature Transform,SIFT),该方法具有良好的抗尺度变化、光照变化及噪声干扰能力,开启了基于特征配准影像的新纪元.由于多源影像间较大的非线性辐射差异易造成梯度信息不稳定,利用梯度特征信息的SIFT方法不再适用于配准多源影像.因此,许多研究提出了不同的SIFT改进方法.UR-SIFT方法是一种统一鲁棒的尺度不变特征方法[10 ] ,该方法采用基于熵的特征选择策略获取分布均匀的特征点.OS-SIFT方法使用两种不同的运算符计算光学和SAR影像的一致梯度以提高特征点的可重复性[11 ] .后来相位一致性(Phase Congruency,PC)特征因其更好的光照和对比度不变性被广泛应用于多源影像配准.叶沅鑫等[12 ] 综合利用PC特征的强度和方向信息建立了一种表示影像间几何结构相似性的匹配测度,该方法能够较好地适应光学和SAR影像间显著的非线性辐射变化,但却不具有旋转和尺度不变性.李东宸等[13 ] 通过结合PC强度信息和引导尺度空间网格划分提取均匀分布的特征点,并利用PC幅值和方向构建稳定的描述符,该方法对光学和SAR影像配准具有较高的普适性.Wang等[14 ] 基于PC多矩特征图提取均匀分布的特征点,并结合多尺度最大方向索引图和PC方向构建了鲁棒的特征描述符,能够很好地抵抗光学和SAR影像之间的非线性辐射差异和强散斑噪声. ...
OS-SIFT: A robust SIFT-like algorithm for high-resolution optical-to-SAR image registration in suburban areas
1
2018
... 近年来,学者们在基于特征的影像配准研究中取得了许多重大成果.Lowe[9 ] 通过引入尺度空间提出一种尺度不变特征变换方法(Scale Invariant Feature Transform,SIFT),该方法具有良好的抗尺度变化、光照变化及噪声干扰能力,开启了基于特征配准影像的新纪元.由于多源影像间较大的非线性辐射差异易造成梯度信息不稳定,利用梯度特征信息的SIFT方法不再适用于配准多源影像.因此,许多研究提出了不同的SIFT改进方法.UR-SIFT方法是一种统一鲁棒的尺度不变特征方法[10 ] ,该方法采用基于熵的特征选择策略获取分布均匀的特征点.OS-SIFT方法使用两种不同的运算符计算光学和SAR影像的一致梯度以提高特征点的可重复性[11 ] .后来相位一致性(Phase Congruency,PC)特征因其更好的光照和对比度不变性被广泛应用于多源影像配准.叶沅鑫等[12 ] 综合利用PC特征的强度和方向信息建立了一种表示影像间几何结构相似性的匹配测度,该方法能够较好地适应光学和SAR影像间显著的非线性辐射变化,但却不具有旋转和尺度不变性.李东宸等[13 ] 通过结合PC强度信息和引导尺度空间网格划分提取均匀分布的特征点,并利用PC幅值和方向构建稳定的描述符,该方法对光学和SAR影像配准具有较高的普适性.Wang等[14 ] 基于PC多矩特征图提取均匀分布的特征点,并结合多尺度最大方向索引图和PC方向构建了鲁棒的特征描述符,能够很好地抵抗光学和SAR影像之间的非线性辐射差异和强散斑噪声. ...
基于几何结构属性的光学和SAR影像自动配准
1
2017
... 近年来,学者们在基于特征的影像配准研究中取得了许多重大成果.Lowe[9 ] 通过引入尺度空间提出一种尺度不变特征变换方法(Scale Invariant Feature Transform,SIFT),该方法具有良好的抗尺度变化、光照变化及噪声干扰能力,开启了基于特征配准影像的新纪元.由于多源影像间较大的非线性辐射差异易造成梯度信息不稳定,利用梯度特征信息的SIFT方法不再适用于配准多源影像.因此,许多研究提出了不同的SIFT改进方法.UR-SIFT方法是一种统一鲁棒的尺度不变特征方法[10 ] ,该方法采用基于熵的特征选择策略获取分布均匀的特征点.OS-SIFT方法使用两种不同的运算符计算光学和SAR影像的一致梯度以提高特征点的可重复性[11 ] .后来相位一致性(Phase Congruency,PC)特征因其更好的光照和对比度不变性被广泛应用于多源影像配准.叶沅鑫等[12 ] 综合利用PC特征的强度和方向信息建立了一种表示影像间几何结构相似性的匹配测度,该方法能够较好地适应光学和SAR影像间显著的非线性辐射变化,但却不具有旋转和尺度不变性.李东宸等[13 ] 通过结合PC强度信息和引导尺度空间网格划分提取均匀分布的特征点,并利用PC幅值和方向构建稳定的描述符,该方法对光学和SAR影像配准具有较高的普适性.Wang等[14 ] 基于PC多矩特征图提取均匀分布的特征点,并结合多尺度最大方向索引图和PC方向构建了鲁棒的特征描述符,能够很好地抵抗光学和SAR影像之间的非线性辐射差异和强散斑噪声. ...
基于几何结构属性的光学和SAR影像自动配准
1
2017
... 近年来,学者们在基于特征的影像配准研究中取得了许多重大成果.Lowe[9 ] 通过引入尺度空间提出一种尺度不变特征变换方法(Scale Invariant Feature Transform,SIFT),该方法具有良好的抗尺度变化、光照变化及噪声干扰能力,开启了基于特征配准影像的新纪元.由于多源影像间较大的非线性辐射差异易造成梯度信息不稳定,利用梯度特征信息的SIFT方法不再适用于配准多源影像.因此,许多研究提出了不同的SIFT改进方法.UR-SIFT方法是一种统一鲁棒的尺度不变特征方法[10 ] ,该方法采用基于熵的特征选择策略获取分布均匀的特征点.OS-SIFT方法使用两种不同的运算符计算光学和SAR影像的一致梯度以提高特征点的可重复性[11 ] .后来相位一致性(Phase Congruency,PC)特征因其更好的光照和对比度不变性被广泛应用于多源影像配准.叶沅鑫等[12 ] 综合利用PC特征的强度和方向信息建立了一种表示影像间几何结构相似性的匹配测度,该方法能够较好地适应光学和SAR影像间显著的非线性辐射变化,但却不具有旋转和尺度不变性.李东宸等[13 ] 通过结合PC强度信息和引导尺度空间网格划分提取均匀分布的特征点,并利用PC幅值和方向构建稳定的描述符,该方法对光学和SAR影像配准具有较高的普适性.Wang等[14 ] 基于PC多矩特征图提取均匀分布的特征点,并结合多尺度最大方向索引图和PC方向构建了鲁棒的特征描述符,能够很好地抵抗光学和SAR影像之间的非线性辐射差异和强散斑噪声. ...
均匀分布与结构描述ASIFT相结合的SAR与可见光图像配准算法
1
2020
... 近年来,学者们在基于特征的影像配准研究中取得了许多重大成果.Lowe[9 ] 通过引入尺度空间提出一种尺度不变特征变换方法(Scale Invariant Feature Transform,SIFT),该方法具有良好的抗尺度变化、光照变化及噪声干扰能力,开启了基于特征配准影像的新纪元.由于多源影像间较大的非线性辐射差异易造成梯度信息不稳定,利用梯度特征信息的SIFT方法不再适用于配准多源影像.因此,许多研究提出了不同的SIFT改进方法.UR-SIFT方法是一种统一鲁棒的尺度不变特征方法[10 ] ,该方法采用基于熵的特征选择策略获取分布均匀的特征点.OS-SIFT方法使用两种不同的运算符计算光学和SAR影像的一致梯度以提高特征点的可重复性[11 ] .后来相位一致性(Phase Congruency,PC)特征因其更好的光照和对比度不变性被广泛应用于多源影像配准.叶沅鑫等[12 ] 综合利用PC特征的强度和方向信息建立了一种表示影像间几何结构相似性的匹配测度,该方法能够较好地适应光学和SAR影像间显著的非线性辐射变化,但却不具有旋转和尺度不变性.李东宸等[13 ] 通过结合PC强度信息和引导尺度空间网格划分提取均匀分布的特征点,并利用PC幅值和方向构建稳定的描述符,该方法对光学和SAR影像配准具有较高的普适性.Wang等[14 ] 基于PC多矩特征图提取均匀分布的特征点,并结合多尺度最大方向索引图和PC方向构建了鲁棒的特征描述符,能够很好地抵抗光学和SAR影像之间的非线性辐射差异和强散斑噪声. ...
均匀分布与结构描述ASIFT相结合的SAR与可见光图像配准算法
1
2020
... 近年来,学者们在基于特征的影像配准研究中取得了许多重大成果.Lowe[9 ] 通过引入尺度空间提出一种尺度不变特征变换方法(Scale Invariant Feature Transform,SIFT),该方法具有良好的抗尺度变化、光照变化及噪声干扰能力,开启了基于特征配准影像的新纪元.由于多源影像间较大的非线性辐射差异易造成梯度信息不稳定,利用梯度特征信息的SIFT方法不再适用于配准多源影像.因此,许多研究提出了不同的SIFT改进方法.UR-SIFT方法是一种统一鲁棒的尺度不变特征方法[10 ] ,该方法采用基于熵的特征选择策略获取分布均匀的特征点.OS-SIFT方法使用两种不同的运算符计算光学和SAR影像的一致梯度以提高特征点的可重复性[11 ] .后来相位一致性(Phase Congruency,PC)特征因其更好的光照和对比度不变性被广泛应用于多源影像配准.叶沅鑫等[12 ] 综合利用PC特征的强度和方向信息建立了一种表示影像间几何结构相似性的匹配测度,该方法能够较好地适应光学和SAR影像间显著的非线性辐射变化,但却不具有旋转和尺度不变性.李东宸等[13 ] 通过结合PC强度信息和引导尺度空间网格划分提取均匀分布的特征点,并利用PC幅值和方向构建稳定的描述符,该方法对光学和SAR影像配准具有较高的普适性.Wang等[14 ] 基于PC多矩特征图提取均匀分布的特征点,并结合多尺度最大方向索引图和PC方向构建了鲁棒的特征描述符,能够很好地抵抗光学和SAR影像之间的非线性辐射差异和强散斑噪声. ...
A robust algorithm based on phase congruency for optical and SAR image registration in suburban areas
1
2020
... 近年来,学者们在基于特征的影像配准研究中取得了许多重大成果.Lowe[9 ] 通过引入尺度空间提出一种尺度不变特征变换方法(Scale Invariant Feature Transform,SIFT),该方法具有良好的抗尺度变化、光照变化及噪声干扰能力,开启了基于特征配准影像的新纪元.由于多源影像间较大的非线性辐射差异易造成梯度信息不稳定,利用梯度特征信息的SIFT方法不再适用于配准多源影像.因此,许多研究提出了不同的SIFT改进方法.UR-SIFT方法是一种统一鲁棒的尺度不变特征方法[10 ] ,该方法采用基于熵的特征选择策略获取分布均匀的特征点.OS-SIFT方法使用两种不同的运算符计算光学和SAR影像的一致梯度以提高特征点的可重复性[11 ] .后来相位一致性(Phase Congruency,PC)特征因其更好的光照和对比度不变性被广泛应用于多源影像配准.叶沅鑫等[12 ] 综合利用PC特征的强度和方向信息建立了一种表示影像间几何结构相似性的匹配测度,该方法能够较好地适应光学和SAR影像间显著的非线性辐射变化,但却不具有旋转和尺度不变性.李东宸等[13 ] 通过结合PC强度信息和引导尺度空间网格划分提取均匀分布的特征点,并利用PC幅值和方向构建稳定的描述符,该方法对光学和SAR影像配准具有较高的普适性.Wang等[14 ] 基于PC多矩特征图提取均匀分布的特征点,并结合多尺度最大方向索引图和PC方向构建了鲁棒的特征描述符,能够很好地抵抗光学和SAR影像之间的非线性辐射差异和强散斑噪声. ...
Feature detection from local energy
1
1987
... 相位一致性是一种基于频率域的特征检测模型,其在傅里叶分量相位最大的位置感知特征.Morrone等[15 ] 首次使用相位一致性提取影像的局部特征,并证明了其对光照和对比度变化具有不变性.后来Kovesi[16 ] 对相位一致性计算模型进行扩展,利用定位性能良好的Log-Gabor小波对影像进行卷积运算得到局部相位信息.扩展相位一致性(P C 2
Image features from phase congruency
1
1999
... 相位一致性是一种基于频率域的特征检测模型,其在傅里叶分量相位最大的位置感知特征.Morrone等[15 ] 首次使用相位一致性提取影像的局部特征,并证明了其对光照和对比度变化具有不变性.后来Kovesi[16 ] 对相位一致性计算模型进行扩展,利用定位性能良好的Log-Gabor小波对影像进行卷积运算得到局部相位信息.扩展相位一致性(P C 2
1
1986
... 根据矩分析方法[17 ] 可知,扩展相位一致性最大矩能够反映影像的边缘强度特性,从而具有较好的边缘特征表达能力.扩展相位一致性最大矩M ψ
Scale-space and edge detection using anisotropic diffusion
1
1990
... 现有的特征检测器通常基于高斯尺度(DoG)空间的差异提取特征点,但是该方法应用于多源影像时存在可重复性差且分布不均匀的问题.Perona等[18 ] 首次在尺度空间中引入各向异性扩散滤波,该过程利用连续的迭代运算实现影像每一尺度边缘区域的精确定位.各向异性扩散滤波是一种非线性滤波,它可以更好地保留影像边缘信息,方便影像结构特征提取,一定程度上增加特征点的丰富程度.影像I
HOMPC: A local feature descriptor based on the combination of magnitude and phase congruency information for multi-sensor remote sensing images
1
2018
... 特征描述子的鲁棒性和独特性是建立两幅影像之间正确对应关系的关键.基于索引图生成特征描述子的方法已被证明对于非线性辐射差异具有不变性[19 -20 ] .因此,实验利用主方向索引图(MOIM)构建一种新颖的特征描述子.MOIM是由多尺度多方向的Log-Gabor小波的卷积序列进行构造的,其与输入影像具有相同的尺寸大小.对于给定的影像I x , y
RIFT: Multi-modal image matching based on radiation-variation insensitive feature transform
1
2019
... 特征描述子的鲁棒性和独特性是建立两幅影像之间正确对应关系的关键.基于索引图生成特征描述子的方法已被证明对于非线性辐射差异具有不变性[19 -20 ] .因此,实验利用主方向索引图(MOIM)构建一种新颖的特征描述子.MOIM是由多尺度多方向的Log-Gabor小波的卷积序列进行构造的,其与输入影像具有相同的尺寸大小.对于给定的影像I x , y
A novel point-matching algorithm based on fast sample consensus for image registration
1
2014
... 然后,利用Flann匹配技术得到初始匹配点对,并使用FSC方法[21 ] 剔除外点,得到最终的同名点对.最后,根据这些准确的同名点对迭代计算两幅影像的仿射变换模型参数,实现多源影像的高精度配准. ...
Remote sensing image registration with modified SIFT and enhanced feature matching
1
2016
... 为验证本文方法的有效性,选择两种新颖的PSO-SIFT[22 ] 和LGHD的配准方法与本文方法进行比较,并采用正确匹配数量(NCM)、分布质量(DQ)、均方根误差(RMSE)和计算耗时(T)4种指标进行定量评估,其中分布质量和均方根误差分别利用公式(13) 和公式(14) 计算.上述方法都在MATLAB R2016b平台下实现,实验环境为Inter(R) Core(TM) i7-6500U CPU @ 2.50 GHz,RAM是8 GB. ...
Automatic registration of optical and SAR images via improved phase congruency model
1
2020
... 针对本文提出的多源高分辨率影像配准方法,选取如图4 所示的4组不同类型传感器获取的多源影像进行配准实验,其中第一行表示参考影像,第二行表示待配准影像.这些影像分别覆盖了城市、工厂、农田和郊区等不同的场景,并且每组影像中参考影像和待配准影像具有不同的时相和空间分辨率.第一组影像的参考影像和待配准影像分别是Google Earth影像和GF-2全色影像,对应的空间分辨率分别为1.2 m/像素和0.8 m/像素,其大小均为800×800像素;第二组影像的参考影像和待配准影像分别为Google Earth影像和ZY-3全色影像,对应的空间分辨率分别为2.1 m/像素和2.1 m/像素,其大小分别为800×800像素和900×900像素;第三组影像的参考影像和待配准影像分别是Google Earth影像和TerraSAR-X影像,对应的空间分辨率均为1 m/像素,其大小均为512×512像素;第四组影像的参考影像和待配准影像分别是光学影像和红外影像,对应的空间分辨率均为0.5 m/像素,其大小均为600×600像素.其中,第三组影像和第四组影像分别来自文献[23 ]和文献[24 ],其大小均为512×512像素. ...
Fast and robust matching for multimodal remote sensing image registration
1
2019
... 针对本文提出的多源高分辨率影像配准方法,选取如图4 所示的4组不同类型传感器获取的多源影像进行配准实验,其中第一行表示参考影像,第二行表示待配准影像.这些影像分别覆盖了城市、工厂、农田和郊区等不同的场景,并且每组影像中参考影像和待配准影像具有不同的时相和空间分辨率.第一组影像的参考影像和待配准影像分别是Google Earth影像和GF-2全色影像,对应的空间分辨率分别为1.2 m/像素和0.8 m/像素,其大小均为800×800像素;第二组影像的参考影像和待配准影像分别为Google Earth影像和ZY-3全色影像,对应的空间分辨率分别为2.1 m/像素和2.1 m/像素,其大小分别为800×800像素和900×900像素;第三组影像的参考影像和待配准影像分别是Google Earth影像和TerraSAR-X影像,对应的空间分辨率均为1 m/像素,其大小均为512×512像素;第四组影像的参考影像和待配准影像分别是光学影像和红外影像,对应的空间分辨率均为0.5 m/像素,其大小均为600×600像素.其中,第三组影像和第四组影像分别来自文献[23 ]和文献[24 ],其大小均为512×512像素. ...








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}