遥感图像云检测方法综述
1
2014
... 地球近1/3—1/2的区域被云覆盖[1 ] ,使得许多光学遥感图像不能被充分使用甚至是成为无效数据.近些年,高分辨率全色影像发展迅猛,其在军事和科研领域的应用越来越广泛.但在缺少短波红外数据的情况下,下垫面的雪与地物亮目标在可见光光谱特征上与云近似,导致准确识别云雪成为一个难题.随着高分辨率卫星越来越多,所获取的海量数据占用了更多星上资源并增加了数传压力.因此有效数据的获取和传输显得尤为重要.随着智能卫星的发展,基于神经网络的数据有效性智能判别逐渐移植于卫星平台.但现有神经网络模型复杂、权重参数量大,有限的星上计算资源无法满足实时计算且不易部署和更新.因此面向智能化的云雪识别算法研究是有较大应用价值和必要性的. ...
遥感图像云检测方法综述
1
2014
... 地球近1/3—1/2的区域被云覆盖[1 ] ,使得许多光学遥感图像不能被充分使用甚至是成为无效数据.近些年,高分辨率全色影像发展迅猛,其在军事和科研领域的应用越来越广泛.但在缺少短波红外数据的情况下,下垫面的雪与地物亮目标在可见光光谱特征上与云近似,导致准确识别云雪成为一个难题.随着高分辨率卫星越来越多,所获取的海量数据占用了更多星上资源并增加了数传压力.因此有效数据的获取和传输显得尤为重要.随着智能卫星的发展,基于神经网络的数据有效性智能判别逐渐移植于卫星平台.但现有神经网络模型复杂、权重参数量大,有限的星上计算资源无法满足实时计算且不易部署和更新.因此面向智能化的云雪识别算法研究是有较大应用价值和必要性的. ...
Review on the technology of threshold selection in image segmentation
1
2004
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
ISCCP cloud data products
1
1991
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
An improved method of detecting clear sky and cloudy radiances from AVHRR data
0
1988
Scientific basis and initial evaluation of the CLAVR21 global clear/cloud classification algorithm for advanced very high resolution radiometer
0
1999
分形图像分析与分形维数计算程序的设计
1
1999
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
分形图像分析与分形维数计算程序的设计
1
1999
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
Improvement of universal dynamic threshold cloud detection algorithm and its application in high resolution satellite
1
2018
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
Improvement of universal dynamic threshold cloud detection algorithm and its application in high resolution satellite
1
2018
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
Kmeans与Otsu相结合的MODIS云检测算法
1
2020
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
Kmeans与Otsu相结合的MODIS云检测算法
1
2020
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
基于灰度连通域加权分数维的云雾自动分离算法
1
2020
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
基于灰度连通域加权分数维的云雾自动分离算法
1
2020
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
Hyperspectral infrared sounder cloud detection using deep neural network model
1
2022
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
Research on GF-6 WFV data cloud detection based on improved LCCD algorithm
1
2020
... (1)基于光谱信息的云雪识别[2 ] .ISCCP、APOLLO、CLAVR等[3 -6 ] 方法利用高/多光谱信息来探测云.王权等[7 ] 人利用可见光、近红外波段的光谱差异改进了基于先验地表反射率数据库支持的动态阈值云检测算法(UDTCDA),整体云识别精度大于85%,但方法对地表反射率变化明显或具有崎岖复杂地形的地区适用性低,而且因数据间的配准误差容易产生误判现象.向培素[8 ] 提出对MODIS数据使用Otsu法确定云和非云集合,但无法区分雪.Hu等[9 ] 提出云检测阈值自动生成(CDAG)算法,使用预先确定云和晴空像元的AVIRIS高光谱数据模拟出不同传感器的云和晴空像元数据,据此生成云检测阈值.该方法在薄云和碎云条件下,识别精度低于较厚的云.Liu等[10 ] 提出一种基于高光谱和近红外数据的云检测算法,对陆地和海上云识别准确率达到88%和95%.但该方法对数据要求较高,不便于星上数据汇集和实时计算.王永吉等[11 ] 改进LCCD算法 (Land Cover-based Cloud Detection),以FROM-GLC10作为先验数据,考虑不同地表类型反射率的变化,在每种地表类型上分别采用不同的方法设置阈值,平均云正确率达到88.7%.但方法对薄云存在一定的漏检、误检现象,且不同地表的经验阈值是根据标准地物反射率所得,因此结果受太阳高度角、季节等因素影响. ...
基于改进 CDAG云检测算法的Landsat-8 OLI云雪识别
1
2021
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
基于改进 CDAG云检测算法的Landsat-8 OLI云雪识别
1
2021
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
风云气象卫星影像自动精细云检测
1
2019
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
风云气象卫星影像自动精细云检测
1
2019
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
高分一号卫星影像自动云检测
1
2018
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
高分一号卫星影像自动云检测
1
2018
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
Contextual pattern recognition applied to cloud detection and identification
1
1985
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
1
1982
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
Multifeature texture analysis for the classification of clouds in satellite imagery
1
2003
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
一种基于纹理特征的卫星遥感图像云探测方法
1
2007
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
一种基于纹理特征的卫星遥感图像云探测方法
1
2007
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
基于共生矩阵的图像纹理特征提取及应用
0
2006
基于共生矩阵的图像纹理特征提取及应用
0
2006
智能小卫星自动云判方法研究
2
2011
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
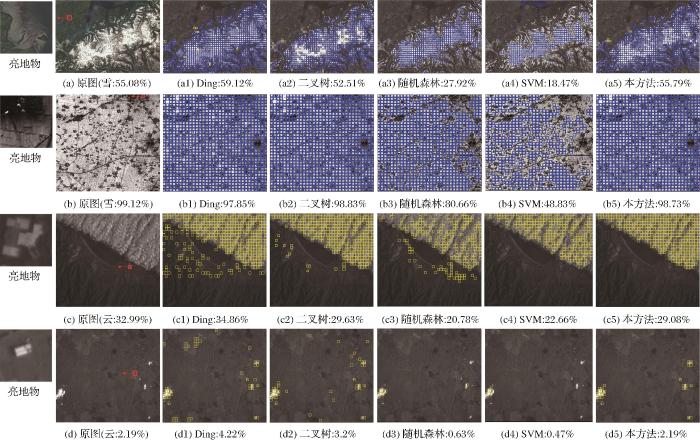
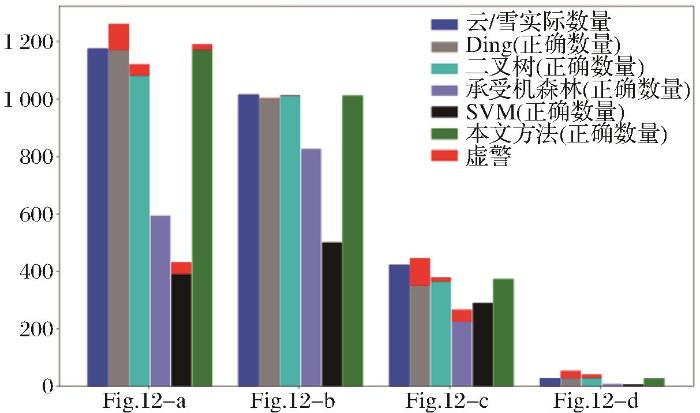
... 文献[21 ]利用分形维数和角二阶矩对云、雪进行识别,因此选取该方法作为对比算法.同时选取仅二叉树网络(BT)作为另一种对比分析方法,以比较骨干网络存在与否之差异.此外,选择随机森林(RF)以及SVM[39 ] 两种非BP神经网络的机器学习方法作为对比算法.采用上述4种方法以及本文方法对实验数据进行识别. ...
智能小卫星自动云判方法研究
2
2011
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
... 文献[21 ]利用分形维数和角二阶矩对云、雪进行识别,因此选取该方法作为对比算法.同时选取仅二叉树网络(BT)作为另一种对比分析方法,以比较骨干网络存在与否之差异.此外,选择随机森林(RF)以及SVM[39 ] 两种非BP神经网络的机器学习方法作为对比算法.采用上述4种方法以及本文方法对实验数据进行识别. ...
基于多维多粒度级联森林的高原地区云雪分类
1
2018
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
基于多维多粒度级联森林的高原地区云雪分类
1
2018
... (2)基于纹理特征的云雪识别[12 ] .刘军等[13 ] 提出了基于连通区域的闭形式抠图的自动精细云检测方法,阈值计算复杂且易受噪声影响.钟静等[14 ] 提出一种基于自适应阈值和形态学综合的云检测算法,该方法仅针对云而且最高和最低亮度阈值受无云和含云样本影响较大.Kittler等[15 ] 提出了基于纹理测度的海面云识别方法、Mandelbrot[16 ] 建立了分形理论、Christodoulou等[17 ] 提出利用气象卫星数据进行云纹理特征空间分析,这些思想被曹琼等[18 -21 ] 发展利用纹理和灰度共生矩阵检测云和地物,同时将图像分成更小的子块,并将复杂的云检测转化为更简单的云分类.但方法在区分云与下垫面以及云、雪识别时使用较多阈值,导致算法建立在较多阈值基础上,因而不具有较强的泛化能力.翁理国等[22 ] 改进多粒度级联森林(gcForest)算法对HJ-1A/1B卫星图像进行预测,缩短了云雪检测时间.但该方法对云雪共存数据检测效果一般. ...
Global distribution of cloud cover derived from NOAA/AVHRR operational satellite data
1
1991
... (3)综合分析法[23 ] .Simpson等[24 ] 较早应用人工神经网络(ANN)技术来检测地物取得一定效果,但精度不足.高军等[25 ] 基于风云四号的可见光、近红外图像进行分析,提出了一种基于归一化动云指数的动态阈值法用于初步云检测,并进一步提出基于BP神经网络的云检测算法.但算法训练所需参数较多,需赋予每一个点大量的附加信息(各通道的测量值、各通道相较于上一次测量的变化值、卫星高度角等),不便于快速、实时处理.瞿建华等[26 ] 使用深度全卷积神经网络作为核心结构,基于EOS/MODIS云检测原理选择合适的通道作为特性向量参数,针对不同的场景进行分类和网络模型的训练,但该方法在雪或地面亮目标存在时精度较低.曹辉等[27 ] 提出密集连接空洞卷积神经网络进行云雪卫星图像识别研究,提升卫星云雪图像的检测效果,但是其对于雪的误检还有待降低.Qiao等[28 ] 基于FY-4A AGRI数据的优点和云层的流动特性,改进一种最大亮温图像合成算法,使用气象地面观测数据集和MOD10A1数据对该方法进行评估,总体云识别精度分别达到94.11%和98.55%,但该方法也难以区分云和雪.针对Landsat图像,Xu等[29 ] 提出基于注意力机制的生成对抗去云算法.在与传统和神经网络方法对比中,表现较好.但该方法网络较复杂,需简化网络提高方法的实际应用.Xiang等[30 ] 研制了一种基于地表云图的云识别系统,用于天气预报. ...
Improved cloud detection in GOES scenes over the oceans
1
1995
... (3)综合分析法[23 ] .Simpson等[24 ] 较早应用人工神经网络(ANN)技术来检测地物取得一定效果,但精度不足.高军等[25 ] 基于风云四号的可见光、近红外图像进行分析,提出了一种基于归一化动云指数的动态阈值法用于初步云检测,并进一步提出基于BP神经网络的云检测算法.但算法训练所需参数较多,需赋予每一个点大量的附加信息(各通道的测量值、各通道相较于上一次测量的变化值、卫星高度角等),不便于快速、实时处理.瞿建华等[26 ] 使用深度全卷积神经网络作为核心结构,基于EOS/MODIS云检测原理选择合适的通道作为特性向量参数,针对不同的场景进行分类和网络模型的训练,但该方法在雪或地面亮目标存在时精度较低.曹辉等[27 ] 提出密集连接空洞卷积神经网络进行云雪卫星图像识别研究,提升卫星云雪图像的检测效果,但是其对于雪的误检还有待降低.Qiao等[28 ] 基于FY-4A AGRI数据的优点和云层的流动特性,改进一种最大亮温图像合成算法,使用气象地面观测数据集和MOD10A1数据对该方法进行评估,总体云识别精度分别达到94.11%和98.55%,但该方法也难以区分云和雪.针对Landsat图像,Xu等[29 ] 提出基于注意力机制的生成对抗去云算法.在与传统和神经网络方法对比中,表现较好.但该方法网络较复杂,需简化网络提高方法的实际应用.Xiang等[30 ] 研制了一种基于地表云图的云识别系统,用于天气预报. ...
基于全卷积神经网络的卫星遥感图像云检测方法
1
2019
... (3)综合分析法[23 ] .Simpson等[24 ] 较早应用人工神经网络(ANN)技术来检测地物取得一定效果,但精度不足.高军等[25 ] 基于风云四号的可见光、近红外图像进行分析,提出了一种基于归一化动云指数的动态阈值法用于初步云检测,并进一步提出基于BP神经网络的云检测算法.但算法训练所需参数较多,需赋予每一个点大量的附加信息(各通道的测量值、各通道相较于上一次测量的变化值、卫星高度角等),不便于快速、实时处理.瞿建华等[26 ] 使用深度全卷积神经网络作为核心结构,基于EOS/MODIS云检测原理选择合适的通道作为特性向量参数,针对不同的场景进行分类和网络模型的训练,但该方法在雪或地面亮目标存在时精度较低.曹辉等[27 ] 提出密集连接空洞卷积神经网络进行云雪卫星图像识别研究,提升卫星云雪图像的检测效果,但是其对于雪的误检还有待降低.Qiao等[28 ] 基于FY-4A AGRI数据的优点和云层的流动特性,改进一种最大亮温图像合成算法,使用气象地面观测数据集和MOD10A1数据对该方法进行评估,总体云识别精度分别达到94.11%和98.55%,但该方法也难以区分云和雪.针对Landsat图像,Xu等[29 ] 提出基于注意力机制的生成对抗去云算法.在与传统和神经网络方法对比中,表现较好.但该方法网络较复杂,需简化网络提高方法的实际应用.Xiang等[30 ] 研制了一种基于地表云图的云识别系统,用于天气预报. ...
基于全卷积神经网络的卫星遥感图像云检测方法
1
2019
... (3)综合分析法[23 ] .Simpson等[24 ] 较早应用人工神经网络(ANN)技术来检测地物取得一定效果,但精度不足.高军等[25 ] 基于风云四号的可见光、近红外图像进行分析,提出了一种基于归一化动云指数的动态阈值法用于初步云检测,并进一步提出基于BP神经网络的云检测算法.但算法训练所需参数较多,需赋予每一个点大量的附加信息(各通道的测量值、各通道相较于上一次测量的变化值、卫星高度角等),不便于快速、实时处理.瞿建华等[26 ] 使用深度全卷积神经网络作为核心结构,基于EOS/MODIS云检测原理选择合适的通道作为特性向量参数,针对不同的场景进行分类和网络模型的训练,但该方法在雪或地面亮目标存在时精度较低.曹辉等[27 ] 提出密集连接空洞卷积神经网络进行云雪卫星图像识别研究,提升卫星云雪图像的检测效果,但是其对于雪的误检还有待降低.Qiao等[28 ] 基于FY-4A AGRI数据的优点和云层的流动特性,改进一种最大亮温图像合成算法,使用气象地面观测数据集和MOD10A1数据对该方法进行评估,总体云识别精度分别达到94.11%和98.55%,但该方法也难以区分云和雪.针对Landsat图像,Xu等[29 ] 提出基于注意力机制的生成对抗去云算法.在与传统和神经网络方法对比中,表现较好.但该方法网络较复杂,需简化网络提高方法的实际应用.Xiang等[30 ] 研制了一种基于地表云图的云识别系统,用于天气预报. ...
基于深度学习的FY3D/MERSI和EOS/MODIS云检测模型研究
1
2019
... (3)综合分析法[23 ] .Simpson等[24 ] 较早应用人工神经网络(ANN)技术来检测地物取得一定效果,但精度不足.高军等[25 ] 基于风云四号的可见光、近红外图像进行分析,提出了一种基于归一化动云指数的动态阈值法用于初步云检测,并进一步提出基于BP神经网络的云检测算法.但算法训练所需参数较多,需赋予每一个点大量的附加信息(各通道的测量值、各通道相较于上一次测量的变化值、卫星高度角等),不便于快速、实时处理.瞿建华等[26 ] 使用深度全卷积神经网络作为核心结构,基于EOS/MODIS云检测原理选择合适的通道作为特性向量参数,针对不同的场景进行分类和网络模型的训练,但该方法在雪或地面亮目标存在时精度较低.曹辉等[27 ] 提出密集连接空洞卷积神经网络进行云雪卫星图像识别研究,提升卫星云雪图像的检测效果,但是其对于雪的误检还有待降低.Qiao等[28 ] 基于FY-4A AGRI数据的优点和云层的流动特性,改进一种最大亮温图像合成算法,使用气象地面观测数据集和MOD10A1数据对该方法进行评估,总体云识别精度分别达到94.11%和98.55%,但该方法也难以区分云和雪.针对Landsat图像,Xu等[29 ] 提出基于注意力机制的生成对抗去云算法.在与传统和神经网络方法对比中,表现较好.但该方法网络较复杂,需简化网络提高方法的实际应用.Xiang等[30 ] 研制了一种基于地表云图的云识别系统,用于天气预报. ...
基于深度学习的FY3D/MERSI和EOS/MODIS云检测模型研究
1
2019
... (3)综合分析法[23 ] .Simpson等[24 ] 较早应用人工神经网络(ANN)技术来检测地物取得一定效果,但精度不足.高军等[25 ] 基于风云四号的可见光、近红外图像进行分析,提出了一种基于归一化动云指数的动态阈值法用于初步云检测,并进一步提出基于BP神经网络的云检测算法.但算法训练所需参数较多,需赋予每一个点大量的附加信息(各通道的测量值、各通道相较于上一次测量的变化值、卫星高度角等),不便于快速、实时处理.瞿建华等[26 ] 使用深度全卷积神经网络作为核心结构,基于EOS/MODIS云检测原理选择合适的通道作为特性向量参数,针对不同的场景进行分类和网络模型的训练,但该方法在雪或地面亮目标存在时精度较低.曹辉等[27 ] 提出密集连接空洞卷积神经网络进行云雪卫星图像识别研究,提升卫星云雪图像的检测效果,但是其对于雪的误检还有待降低.Qiao等[28 ] 基于FY-4A AGRI数据的优点和云层的流动特性,改进一种最大亮温图像合成算法,使用气象地面观测数据集和MOD10A1数据对该方法进行评估,总体云识别精度分别达到94.11%和98.55%,但该方法也难以区分云和雪.针对Landsat图像,Xu等[29 ] 提出基于注意力机制的生成对抗去云算法.在与传统和神经网络方法对比中,表现较好.但该方法网络较复杂,需简化网络提高方法的实际应用.Xiang等[30 ] 研制了一种基于地表云图的云识别系统,用于天气预报. ...
基于密集连接空洞卷积神经网络的青藏地区云雪图像分类
1
2019
... (3)综合分析法[23 ] .Simpson等[24 ] 较早应用人工神经网络(ANN)技术来检测地物取得一定效果,但精度不足.高军等[25 ] 基于风云四号的可见光、近红外图像进行分析,提出了一种基于归一化动云指数的动态阈值法用于初步云检测,并进一步提出基于BP神经网络的云检测算法.但算法训练所需参数较多,需赋予每一个点大量的附加信息(各通道的测量值、各通道相较于上一次测量的变化值、卫星高度角等),不便于快速、实时处理.瞿建华等[26 ] 使用深度全卷积神经网络作为核心结构,基于EOS/MODIS云检测原理选择合适的通道作为特性向量参数,针对不同的场景进行分类和网络模型的训练,但该方法在雪或地面亮目标存在时精度较低.曹辉等[27 ] 提出密集连接空洞卷积神经网络进行云雪卫星图像识别研究,提升卫星云雪图像的检测效果,但是其对于雪的误检还有待降低.Qiao等[28 ] 基于FY-4A AGRI数据的优点和云层的流动特性,改进一种最大亮温图像合成算法,使用气象地面观测数据集和MOD10A1数据对该方法进行评估,总体云识别精度分别达到94.11%和98.55%,但该方法也难以区分云和雪.针对Landsat图像,Xu等[29 ] 提出基于注意力机制的生成对抗去云算法.在与传统和神经网络方法对比中,表现较好.但该方法网络较复杂,需简化网络提高方法的实际应用.Xiang等[30 ] 研制了一种基于地表云图的云识别系统,用于天气预报. ...
基于密集连接空洞卷积神经网络的青藏地区云雪图像分类
1
2019
... (3)综合分析法[23 ] .Simpson等[24 ] 较早应用人工神经网络(ANN)技术来检测地物取得一定效果,但精度不足.高军等[25 ] 基于风云四号的可见光、近红外图像进行分析,提出了一种基于归一化动云指数的动态阈值法用于初步云检测,并进一步提出基于BP神经网络的云检测算法.但算法训练所需参数较多,需赋予每一个点大量的附加信息(各通道的测量值、各通道相较于上一次测量的变化值、卫星高度角等),不便于快速、实时处理.瞿建华等[26 ] 使用深度全卷积神经网络作为核心结构,基于EOS/MODIS云检测原理选择合适的通道作为特性向量参数,针对不同的场景进行分类和网络模型的训练,但该方法在雪或地面亮目标存在时精度较低.曹辉等[27 ] 提出密集连接空洞卷积神经网络进行云雪卫星图像识别研究,提升卫星云雪图像的检测效果,但是其对于雪的误检还有待降低.Qiao等[28 ] 基于FY-4A AGRI数据的优点和云层的流动特性,改进一种最大亮温图像合成算法,使用气象地面观测数据集和MOD10A1数据对该方法进行评估,总体云识别精度分别达到94.11%和98.55%,但该方法也难以区分云和雪.针对Landsat图像,Xu等[29 ] 提出基于注意力机制的生成对抗去云算法.在与传统和神经网络方法对比中,表现较好.但该方法网络较复杂,需简化网络提高方法的实际应用.Xiang等[30 ] 研制了一种基于地表云图的云识别系统,用于天气预报. ...
A new geostationary satellite-based snow cover recognition method for FY-4Y AGRI
1
2021
... (3)综合分析法[23 ] .Simpson等[24 ] 较早应用人工神经网络(ANN)技术来检测地物取得一定效果,但精度不足.高军等[25 ] 基于风云四号的可见光、近红外图像进行分析,提出了一种基于归一化动云指数的动态阈值法用于初步云检测,并进一步提出基于BP神经网络的云检测算法.但算法训练所需参数较多,需赋予每一个点大量的附加信息(各通道的测量值、各通道相较于上一次测量的变化值、卫星高度角等),不便于快速、实时处理.瞿建华等[26 ] 使用深度全卷积神经网络作为核心结构,基于EOS/MODIS云检测原理选择合适的通道作为特性向量参数,针对不同的场景进行分类和网络模型的训练,但该方法在雪或地面亮目标存在时精度较低.曹辉等[27 ] 提出密集连接空洞卷积神经网络进行云雪卫星图像识别研究,提升卫星云雪图像的检测效果,但是其对于雪的误检还有待降低.Qiao等[28 ] 基于FY-4A AGRI数据的优点和云层的流动特性,改进一种最大亮温图像合成算法,使用气象地面观测数据集和MOD10A1数据对该方法进行评估,总体云识别精度分别达到94.11%和98.55%,但该方法也难以区分云和雪.针对Landsat图像,Xu等[29 ] 提出基于注意力机制的生成对抗去云算法.在与传统和神经网络方法对比中,表现较好.但该方法网络较复杂,需简化网络提高方法的实际应用.Xiang等[30 ] 研制了一种基于地表云图的云识别系统,用于天气预报. ...
Attention mechanism-based generative adversarial networks for cloud removal in Landsat images
1
2022
... (3)综合分析法[23 ] .Simpson等[24 ] 较早应用人工神经网络(ANN)技术来检测地物取得一定效果,但精度不足.高军等[25 ] 基于风云四号的可见光、近红外图像进行分析,提出了一种基于归一化动云指数的动态阈值法用于初步云检测,并进一步提出基于BP神经网络的云检测算法.但算法训练所需参数较多,需赋予每一个点大量的附加信息(各通道的测量值、各通道相较于上一次测量的变化值、卫星高度角等),不便于快速、实时处理.瞿建华等[26 ] 使用深度全卷积神经网络作为核心结构,基于EOS/MODIS云检测原理选择合适的通道作为特性向量参数,针对不同的场景进行分类和网络模型的训练,但该方法在雪或地面亮目标存在时精度较低.曹辉等[27 ] 提出密集连接空洞卷积神经网络进行云雪卫星图像识别研究,提升卫星云雪图像的检测效果,但是其对于雪的误检还有待降低.Qiao等[28 ] 基于FY-4A AGRI数据的优点和云层的流动特性,改进一种最大亮温图像合成算法,使用气象地面观测数据集和MOD10A1数据对该方法进行评估,总体云识别精度分别达到94.11%和98.55%,但该方法也难以区分云和雪.针对Landsat图像,Xu等[29 ] 提出基于注意力机制的生成对抗去云算法.在与传统和神经网络方法对比中,表现较好.但该方法网络较复杂,需简化网络提高方法的实际应用.Xiang等[30 ] 研制了一种基于地表云图的云识别系统,用于天气预报. ...
Development of cloud recognition system for ground-based cloud images based on machine vision
1
2021
... (3)综合分析法[23 ] .Simpson等[24 ] 较早应用人工神经网络(ANN)技术来检测地物取得一定效果,但精度不足.高军等[25 ] 基于风云四号的可见光、近红外图像进行分析,提出了一种基于归一化动云指数的动态阈值法用于初步云检测,并进一步提出基于BP神经网络的云检测算法.但算法训练所需参数较多,需赋予每一个点大量的附加信息(各通道的测量值、各通道相较于上一次测量的变化值、卫星高度角等),不便于快速、实时处理.瞿建华等[26 ] 使用深度全卷积神经网络作为核心结构,基于EOS/MODIS云检测原理选择合适的通道作为特性向量参数,针对不同的场景进行分类和网络模型的训练,但该方法在雪或地面亮目标存在时精度较低.曹辉等[27 ] 提出密集连接空洞卷积神经网络进行云雪卫星图像识别研究,提升卫星云雪图像的检测效果,但是其对于雪的误检还有待降低.Qiao等[28 ] 基于FY-4A AGRI数据的优点和云层的流动特性,改进一种最大亮温图像合成算法,使用气象地面观测数据集和MOD10A1数据对该方法进行评估,总体云识别精度分别达到94.11%和98.55%,但该方法也难以区分云和雪.针对Landsat图像,Xu等[29 ] 提出基于注意力机制的生成对抗去云算法.在与传统和神经网络方法对比中,表现较好.但该方法网络较复杂,需简化网络提高方法的实际应用.Xiang等[30 ] 研制了一种基于地表云图的云识别系统,用于天气预报. ...
Batch normalization: accelerating deep network training by reducing internal covariate shift
1
2015
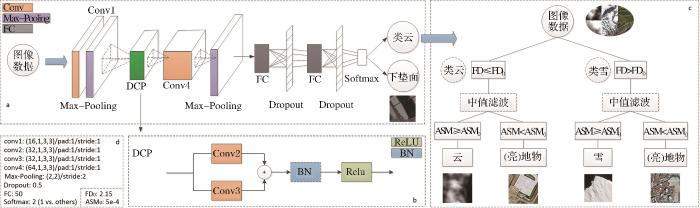
... 骨干网络中具有权重参数的函数共计6个:两个卷积层(conv)、一个DCP结构(含两个卷积)、两个全连接层(FC).BN[31 ] (Batch Normalization)层的目的是正则化特征图,但该层未被采用以求最小化网络结构产生最少的权重参数.输入层连接第一个卷积,所得输出结果经过激活函数ReLU[32 ] 后输入最大池化层[33 ] ;池化层将结果直接输入DCP小块结构,经过DCP中的两个卷积以及ReLU处理后,再将结果输入第四个卷积;经过ReLU后,其结果输入最大池化层进行下采样;下采样结果连接第一个FC并经过ReLU层和第一个Dropou[34 ] 层以降低活跃神经元数量增强网络张力和鲁棒性;上一步结果再次经过第二个FC层,其输出结果直接连接第二个Dropout层不再经过激活函数ReLU;第二个Dropout层的输出结果被输入Softmax[35 ] 层进行类别判别,即输出某类的可能概率.最终的输出结果为两类:云、地物.虽然仅为两类,但地物是多种类型,如:山脉、水体、城市、植被等,其实是“一对多”的分类结果. ...
Rectified linear units improve restricted Boltzmann machine
1
2010
... 骨干网络中具有权重参数的函数共计6个:两个卷积层(conv)、一个DCP结构(含两个卷积)、两个全连接层(FC).BN[31 ] (Batch Normalization)层的目的是正则化特征图,但该层未被采用以求最小化网络结构产生最少的权重参数.输入层连接第一个卷积,所得输出结果经过激活函数ReLU[32 ] 后输入最大池化层[33 ] ;池化层将结果直接输入DCP小块结构,经过DCP中的两个卷积以及ReLU处理后,再将结果输入第四个卷积;经过ReLU后,其结果输入最大池化层进行下采样;下采样结果连接第一个FC并经过ReLU层和第一个Dropou[34 ] 层以降低活跃神经元数量增强网络张力和鲁棒性;上一步结果再次经过第二个FC层,其输出结果直接连接第二个Dropout层不再经过激活函数ReLU;第二个Dropout层的输出结果被输入Softmax[35 ] 层进行类别判别,即输出某类的可能概率.最终的输出结果为两类:云、地物.虽然仅为两类,但地物是多种类型,如:山脉、水体、城市、植被等,其实是“一对多”的分类结果. ...
Densely connected convolutional networks
1
2017
... 骨干网络中具有权重参数的函数共计6个:两个卷积层(conv)、一个DCP结构(含两个卷积)、两个全连接层(FC).BN[31 ] (Batch Normalization)层的目的是正则化特征图,但该层未被采用以求最小化网络结构产生最少的权重参数.输入层连接第一个卷积,所得输出结果经过激活函数ReLU[32 ] 后输入最大池化层[33 ] ;池化层将结果直接输入DCP小块结构,经过DCP中的两个卷积以及ReLU处理后,再将结果输入第四个卷积;经过ReLU后,其结果输入最大池化层进行下采样;下采样结果连接第一个FC并经过ReLU层和第一个Dropou[34 ] 层以降低活跃神经元数量增强网络张力和鲁棒性;上一步结果再次经过第二个FC层,其输出结果直接连接第二个Dropout层不再经过激活函数ReLU;第二个Dropout层的输出结果被输入Softmax[35 ] 层进行类别判别,即输出某类的可能概率.最终的输出结果为两类:云、地物.虽然仅为两类,但地物是多种类型,如:山脉、水体、城市、植被等,其实是“一对多”的分类结果. ...
Dropout: A simple way to prevent neural networks from overfitting
1
2014
... 骨干网络中具有权重参数的函数共计6个:两个卷积层(conv)、一个DCP结构(含两个卷积)、两个全连接层(FC).BN[31 ] (Batch Normalization)层的目的是正则化特征图,但该层未被采用以求最小化网络结构产生最少的权重参数.输入层连接第一个卷积,所得输出结果经过激活函数ReLU[32 ] 后输入最大池化层[33 ] ;池化层将结果直接输入DCP小块结构,经过DCP中的两个卷积以及ReLU处理后,再将结果输入第四个卷积;经过ReLU后,其结果输入最大池化层进行下采样;下采样结果连接第一个FC并经过ReLU层和第一个Dropou[34 ] 层以降低活跃神经元数量增强网络张力和鲁棒性;上一步结果再次经过第二个FC层,其输出结果直接连接第二个Dropout层不再经过激活函数ReLU;第二个Dropout层的输出结果被输入Softmax[35 ] 层进行类别判别,即输出某类的可能概率.最终的输出结果为两类:云、地物.虽然仅为两类,但地物是多种类型,如:山脉、水体、城市、植被等,其实是“一对多”的分类结果. ...
Efficient estimation of word representations in vector space
1
2013
... 骨干网络中具有权重参数的函数共计6个:两个卷积层(conv)、一个DCP结构(含两个卷积)、两个全连接层(FC).BN[31 ] (Batch Normalization)层的目的是正则化特征图,但该层未被采用以求最小化网络结构产生最少的权重参数.输入层连接第一个卷积,所得输出结果经过激活函数ReLU[32 ] 后输入最大池化层[33 ] ;池化层将结果直接输入DCP小块结构,经过DCP中的两个卷积以及ReLU处理后,再将结果输入第四个卷积;经过ReLU后,其结果输入最大池化层进行下采样;下采样结果连接第一个FC并经过ReLU层和第一个Dropou[34 ] 层以降低活跃神经元数量增强网络张力和鲁棒性;上一步结果再次经过第二个FC层,其输出结果直接连接第二个Dropout层不再经过激活函数ReLU;第二个Dropout层的输出结果被输入Softmax[35 ] 层进行类别判别,即输出某类的可能概率.最终的输出结果为两类:云、地物.虽然仅为两类,但地物是多种类型,如:山脉、水体、城市、植被等,其实是“一对多”的分类结果. ...
Gaussian processes for big data
1
2013
... Backbone parameters
Table 2 函数 大小 通道 数量 Conv1 3,3 1 16 Conv2 3,3 1 32 Conv3 3,3 1 32 Conv4 3,3 1 64 Max Pooling 1 2,2/p:1/s:1 — — Max Pooling 2 2,2/p:1/s:1 — — FC 1 64,16,16 — 50 FC 2 50 — 2 Learning rate 0.01 Activation Function ReLU Initialized weight He Parameters updating SGD[36 ] Dropout1 ratio 0.5 Dropout2 ratio 0.5
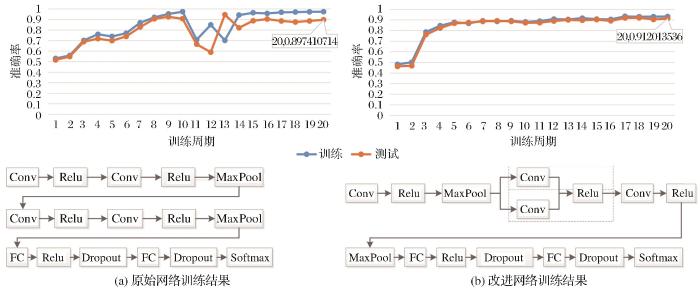
图3 基于分形维数和角二阶矩的卷积神经网络模型原始网络与改进网络训练与测试对比 Comparison of training and testing accuracy between the plain and improved convolutional neural network Fig.3 ![]()
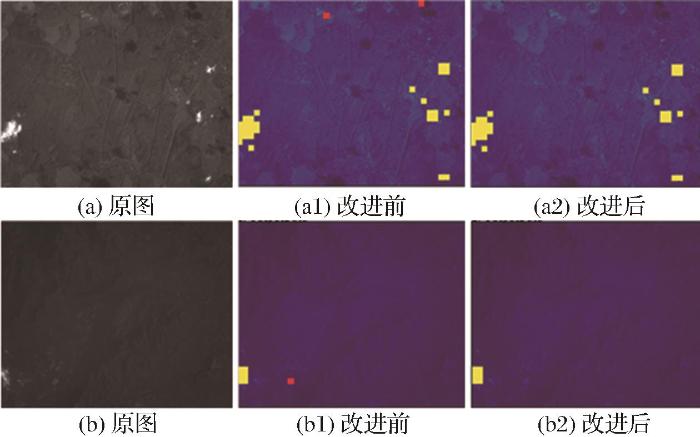
图4 改进前后的神经网络对验证数据识别结果比较 Comparison between the plain and improved CNN on validation dataset Fig.4 ![]()
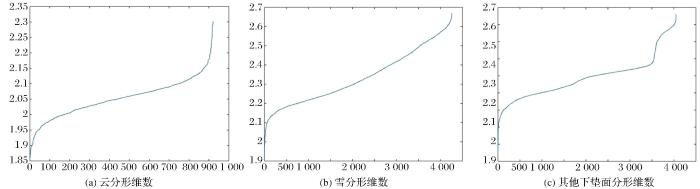
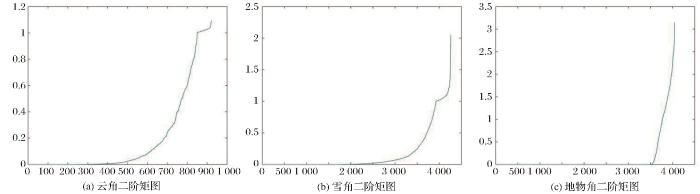
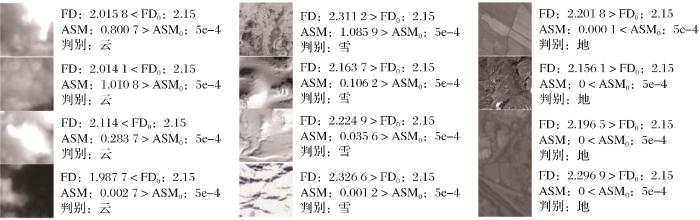
3.2 二叉树辅助网络 二叉树辅助网络用于对类云进行精细识别,其结构如图2 (c)所示.二叉树辅助网络由分形维数和角二阶矩两个传统地物纹理特征分析法构成.基于纹理特征的云检测方法一般利用物体局部与整体的自相似性,通过提取目标场景的空间统计特性进行区分.分形维数用于描述复杂不规则图形的自相似性,可较好地表征纹理的粗糙程度,并且对尺度的变化不敏感,这与人类视觉系统(HVS)有相似之处[37 ] ,适合对不同类型物体进行分类.角二阶矩是图像纹理均一规则性的度量.结合灰度共生矩阵,角二阶矩能够反映图像灰度分布均匀程度和纹理粗细程度,适合于识别大面积的同类物体[38 ] .二者具有互补性,因此可用于云、雪、地物识别. ...
二维灰度图像的分形维数计算
1
2005
... 二叉树辅助网络用于对类云进行精细识别,其结构如图2 (c)所示.二叉树辅助网络由分形维数和角二阶矩两个传统地物纹理特征分析法构成.基于纹理特征的云检测方法一般利用物体局部与整体的自相似性,通过提取目标场景的空间统计特性进行区分.分形维数用于描述复杂不规则图形的自相似性,可较好地表征纹理的粗糙程度,并且对尺度的变化不敏感,这与人类视觉系统(HVS)有相似之处[37 ] ,适合对不同类型物体进行分类.角二阶矩是图像纹理均一规则性的度量.结合灰度共生矩阵,角二阶矩能够反映图像灰度分布均匀程度和纹理粗细程度,适合于识别大面积的同类物体[38 ] .二者具有互补性,因此可用于云、雪、地物识别. ...
二维灰度图像的分形维数计算
1
2005
... 二叉树辅助网络用于对类云进行精细识别,其结构如图2 (c)所示.二叉树辅助网络由分形维数和角二阶矩两个传统地物纹理特征分析法构成.基于纹理特征的云检测方法一般利用物体局部与整体的自相似性,通过提取目标场景的空间统计特性进行区分.分形维数用于描述复杂不规则图形的自相似性,可较好地表征纹理的粗糙程度,并且对尺度的变化不敏感,这与人类视觉系统(HVS)有相似之处[37 ] ,适合对不同类型物体进行分类.角二阶矩是图像纹理均一规则性的度量.结合灰度共生矩阵,角二阶矩能够反映图像灰度分布均匀程度和纹理粗细程度,适合于识别大面积的同类物体[38 ] .二者具有互补性,因此可用于云、雪、地物识别. ...
快速高准确度云检测算法及其应用
1
2009
... 二叉树辅助网络用于对类云进行精细识别,其结构如图2 (c)所示.二叉树辅助网络由分形维数和角二阶矩两个传统地物纹理特征分析法构成.基于纹理特征的云检测方法一般利用物体局部与整体的自相似性,通过提取目标场景的空间统计特性进行区分.分形维数用于描述复杂不规则图形的自相似性,可较好地表征纹理的粗糙程度,并且对尺度的变化不敏感,这与人类视觉系统(HVS)有相似之处[37 ] ,适合对不同类型物体进行分类.角二阶矩是图像纹理均一规则性的度量.结合灰度共生矩阵,角二阶矩能够反映图像灰度分布均匀程度和纹理粗细程度,适合于识别大面积的同类物体[38 ] .二者具有互补性,因此可用于云、雪、地物识别. ...
快速高准确度云检测算法及其应用
1
2009
... 二叉树辅助网络用于对类云进行精细识别,其结构如图2 (c)所示.二叉树辅助网络由分形维数和角二阶矩两个传统地物纹理特征分析法构成.基于纹理特征的云检测方法一般利用物体局部与整体的自相似性,通过提取目标场景的空间统计特性进行区分.分形维数用于描述复杂不规则图形的自相似性,可较好地表征纹理的粗糙程度,并且对尺度的变化不敏感,这与人类视觉系统(HVS)有相似之处[37 ] ,适合对不同类型物体进行分类.角二阶矩是图像纹理均一规则性的度量.结合灰度共生矩阵,角二阶矩能够反映图像灰度分布均匀程度和纹理粗细程度,适合于识别大面积的同类物体[38 ] .二者具有互补性,因此可用于云、雪、地物识别. ...
基于统计和纹理特征的SAS图像SVM分割研究
1
2013
... 文献[21 ]利用分形维数和角二阶矩对云、雪进行识别,因此选取该方法作为对比算法.同时选取仅二叉树网络(BT)作为另一种对比分析方法,以比较骨干网络存在与否之差异.此外,选择随机森林(RF)以及SVM[39 ] 两种非BP神经网络的机器学习方法作为对比算法.采用上述4种方法以及本文方法对实验数据进行识别. ...
基于统计和纹理特征的SAS图像SVM分割研究
1
2013
... 文献[21 ]利用分形维数和角二阶矩对云、雪进行识别,因此选取该方法作为对比算法.同时选取仅二叉树网络(BT)作为另一种对比分析方法,以比较骨干网络存在与否之差异.此外,选择随机森林(RF)以及SVM[39 ] 两种非BP神经网络的机器学习方法作为对比算法.采用上述4种方法以及本文方法对实验数据进行识别. ...
一种光照无关图阴影去除方法
1
2021
... (2)阴影区域灰度较暗且丢失纹理信息导致误检.阴影降低了纹理细节,使得纹理匮乏导致无法准确分类.阴影会使得机器视觉采集的信息受到干扰,从而对目标类别产生误判,降低识别准确度.这一类问题的解决需要结合更多的分析手段,如:目标连续性、图像增强、2D对数色度空间转换[40 ] 等. ...
一种光照无关图阴影去除方法
1
2021
... (2)阴影区域灰度较暗且丢失纹理信息导致误检.阴影降低了纹理细节,使得纹理匮乏导致无法准确分类.阴影会使得机器视觉采集的信息受到干扰,从而对目标类别产生误判,降低识别准确度.这一类问题的解决需要结合更多的分析手段,如:目标连续性、图像增强、2D对数色度空间转换[40 ] 等. ...
More diverse means better: Multimodal deep learning meets remote-sensing imagery classification
1
2021
... 本文提出了一种基于分形维数和角二阶矩的卷积神经网络云雪识别模型.该模型由骨干卷积神经网络、基于分形维数和角二阶矩的二叉树辅助网络构成.通过网络结构对比实验验证了DCP小块结构有效地提高特征信息提取能力,加快模型收敛速度.分形维数和角二阶矩两种图像纹理特征的加入使得识别过程不完全依赖卷积神经网络,从而降低网络深度和权重参数量.利用该模型对不同载荷的不同覆盖类型的遥感数据进行云、雪、地物判别并与4种参考方法进行比较,得到了较好的识别效果,综合准确率达89%,验证了这种方式优于单一方法,能够提高云雪识别准确率.同时,方法不依赖于具有特定强烈吸收或反射的某几类光谱或多种数据融合分析,从而提高了方法的易用性.此外,本方法也验证了多模态[41 ] 数据分析方法变得越来越重要,将是复杂场景下精细化识别的重要技术手段.结合这种思想,下一步工作将具体分析在众多云雪判别算法中出现的对存在阴影的云雪判别较差的问题,以增强复杂条件下判别的准确性和适用性. ...








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}