




1 引 言
变化检测是遥感影像处理领域中的经典问题,其广泛应用于地图更新、土地执法、灾害救援等多个领域 [ 1, 2, 3, 4, 5] 。利用遥感影像进行城市建筑物变化检测,是近年来随着遥感影像分辨率的不断提高,以及城市化进程的快速推进,逐渐热门起来的一个研究方向。国内外学者在这方面做了大量的研究,取得了丰富的成果 [ 6, 7, 8, 9, 10, 11] 。利用高分辨率遥感影像针对建筑物进行变化检测,常见的做法是先通过挖掘遥感影像中的颜色 [ 12] 、阴影 [ 13] 、纹理 [ 14] 和几何结构 [ 15] 等特征,并结合LiDAR [ 16] 、SAR [ 17] 或DSM [ 11, 18] 等三维数据提取建筑物,再对前后时相提取的建筑物进行变化分析。当实验区遥感影像上的建筑屋顶光谱、纹理等较为接近时,采用上述方法能取得较好的效果。然而,实际上城市建筑物屋顶千差万别,用统一的特征去对整幅影像进行识别,势必顾此失彼,提取精度并不理想。此外,这些方法在两幅影像的拍摄视角基本不变或变化不大且建筑物高度不高时可以取得良好的效果。但是对于包含大量高层建筑物的城市场景,当两时相影像拍摄视角和光照情况发生明显变化时,同一建筑物在两时相影像上的影像特征可能产生明显不同,这些成像条件导致的影像变化与真实城市建筑变化导致的影像变化同时出现,造成常规方法检测困难。部分学者针对此问题做了相关研究,也取得了一定的成果 [ 19, 20, 21] ,但在包含大量高层建筑物、场景内容复杂的城市区域,该问题仍未得到很好解决。
考虑到以上问题,本文在几何特征三角形 [ 22] 理论基础上,利用阴影与建筑物的空间上下文关系,提出一种新的城区建筑物变化检测方法。重点解决两方面问题:①建筑物屋顶识别过程中,屋顶种子区域的自动化选取; ②视差造成的建筑物变化误检测。该方法采用经典的双峰分裂法作微小改进进行建筑物阴影提取;进而借助阴影估计可能的屋顶位置,自动选取种子区域,结合区域生长法进行建筑屋顶提取;最后,以视差、视差方位角和面积等作为判定条件对两时相影像建筑物的变化情况进行分析。
2 方 法
2.1 问题分析
对单幅遥感影像来说,由于传感器并非完全垂直于地面摄影,高出地面的建筑物屋顶与其垂直投影的地面位置在影像上的像点产生了位移,这种位移即所谓的投影差。在双时相影像中,由于影像拍摄视角差异导致场景中同一个三维点在两时相遥感影像上的像点位置不同,这种现象通常称之为视差。视差现象广泛存在于各种分辨率的城市遥感影像中。中低分辨率的遥感影像上视差对变化检测结果的影响几乎可以忽略。而在高分辨率遥感影像中(通常认为空间分辨率高于10 m,即为高分辨率),尤其是城区高层建筑变化检测,这种影响尤为明显。
一般来说,影像拍摄视角不变的情况下,建筑物的高度越高,其投影差就越大。若两时相影像拍摄视角相同则投影差不会引起视差,对变化检测结果无影响。但是,两时相影像拍摄视角不同时,则会引起视差。这种视差的大小会随着建筑物的高度增加而增大,有时甚至会超过单个建筑的尺度,严重影响变化检测的结果。本文主要针对这种情况讨论分析。
2.2 建筑物的几何特征三角形
图1

图1
高分影像中的几何特征三角形示例
Fig.1
Examples of geometric features triangle in high resolution remote sensing images
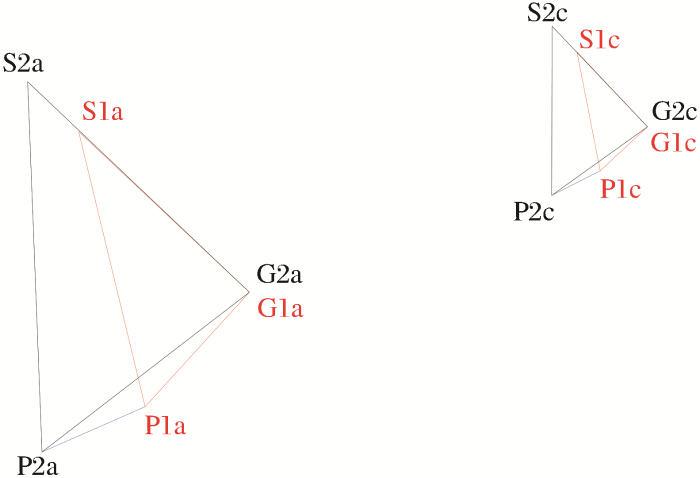
值得一提的是,在某些特殊情况下,几何特征三角形将退化为一条直线段或者一个点。按照文献[22]提出的定义,几何特征三角形的形状受到以下3个方向的影响:传感器拍摄方向、阳光入射方向、地面垂直方向。当这3个方向中,任意两个方向平行时,几何特征三角形将退化为一条直线段;当3个方向均平行时,几何特征三角形则退化为一个点。以 图1中几何特征三角形P 1aG 1aS 1a为例予以说明。传感器拍摄方向为垂直于影像平面的方向,阳光入射方向为图中P 1aS 1a方向,地面垂直方向即P 1aG 1a方向。当传感器拍摄方向与地面垂直方向平行时,点P 1a与G 1a重合,影像上只剩下阴影边界直线G 1aS 1a;当传感器拍摄方向与阳光入射方向平行时,点P 1a与S 1a重合,阴影被建筑物自身完全遮挡,影像上只剩下建筑物侧边线P 1aG 1a;当阳光入射方向与地面垂直方向平行时,点S 1a与G 1a重合,影像上无阴影,只能看见建筑物侧面边线P 1aG 1a;当3个方向都平行时,点P 1a、G 1a与S 1a 3点重合,此时影像上阴影、建筑物侧面都不出现。
2.3 结合视差的建筑物变化检测方法
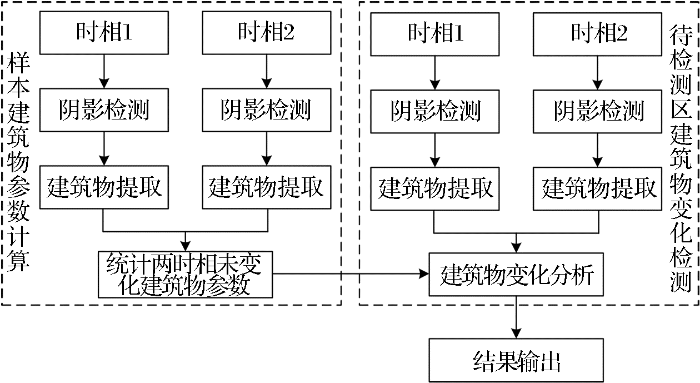
视差引起的误检测利用基于像元的检测方法较难解决,常规方法采用基于分割后分类的面向对象的分析方法。但是由于视差的存在,分类好的建筑物在位置上有较大差异时,面向对象的分析方法仍有诸多困难。利用建筑物几何特征三角形相关特性,可以估计建筑物的大概位置,也可以估算每个建筑物对应的视差值。由未变化样本建筑物事先估算这些参数,就能由时相1中建筑物估计时相2中对应建筑物可能的位置,再对时相2提取的建筑物进行变化分析,能够较好地解决上述问题。基本思路如 图2所示。
图2
2.3.1 建筑阴影检测
直接提取到的阴影会包含大量噪声阴影,包括汽车阴影、树木阴影、路灯电杆等独立地物的阴影,以及部分亮度较低的地物。这些噪声阴影会对后续建筑物提取造成干扰,可以通过形态学滤波,设置一定尺寸的形状因子将其过滤掉。
2.3.2 建筑物位置估计
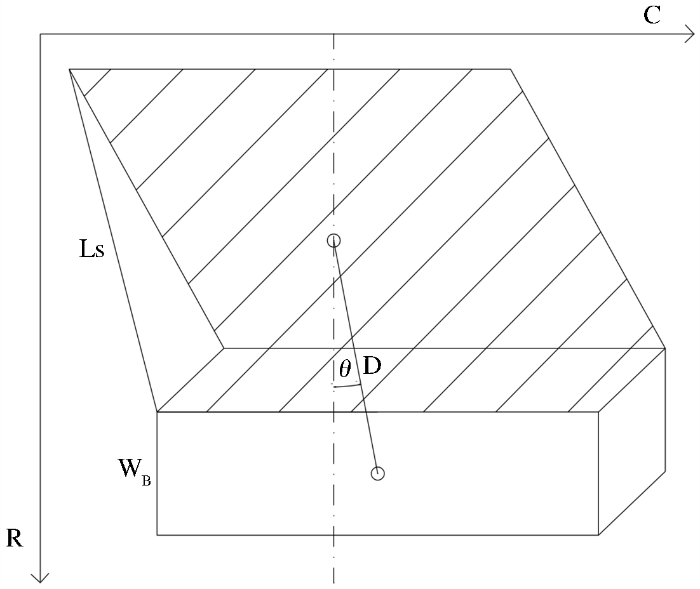
利用阴影与建筑物的空间相邻关系,确定建筑物的大概位置。其基本思路如下:遥感影像中建筑物阴影及其屋顶都能被检测到的情况下,阳光的入射方向可以近似认为是影像上建筑物屋顶中心指向阴影区中心方向,如 图3所示。那么,反过来如果知道了阳光入射方向、阴影中心位置以及阴影长度,也可以估算出建筑物屋顶中心所在的大概位置。其估算公式如下:
其中: R B和 C B分别为屋顶中心位置在影像中的行号和列号, R S和 C S分别为阴影中心位置的行号和列号, θ为阳光入射角, D为阴影中心至屋顶中心的图面距离。其中,阳光入射角 θ可按公式(2)计算获得,距离 D可由公式(3)计算获得近似值。
其中: R b和 C b分别为屋顶中心位置在影像中的行号和列号, R s和 C s分别为阴影中心位置的行号和列号。需要说明的是, R b、 C b、 R s、 C s均为样本地物的相关数据。一般认为,同一幅影像中阳光入射角相同。所以,只需要选取一定数量的样本建筑及其阴影,便可计算得到阳光入射角。
其中: L S为阴影的长度, W B为建筑物的宽度。阴影长度可利用提取到的阴影区域计算获得。而待确定建筑物的宽度事先并不知道,这里采用的是1个经验值,绝大多数多层建筑物的宽度为10 m左右,高层建筑更宽一些。为了避免建筑物宽度取得过宽导致估计的屋顶中心落到实际屋顶以外,本研究采用宽度较小的多层建筑宽度值10 m作为计算数据。这样即使估算的位置没有准确的落在实际中心位置,也是在中心位置附近的屋顶上。此外,计算中还需要将建筑宽度按照影像分辨率换算成以像元数表示的宽度。
图3
2.3.3 建筑物提取
在估计的建筑物屋顶中心附近,取8邻域或24邻域的区域,作为建筑物自动提取的种子区域。屋顶的提取过程采用区域生长法进行提取,以样本区域的光谱均值、纹理特征为参考,并以边缘信息以及距离建筑中心一定距离作为约束条件,完成建筑物屋顶的提取。因这部分工作非本文重点,不再展开论述。
2.3.4 两时相未变化建筑物参数计算
按照上述方法分别对前后两时相影像进行建筑屋顶提取。再对提取到的两时相屋顶进行变化比较时,由于视差的原因,未变化屋顶的位置或多或少都会存在一定偏差。针对此问题,选取一定数量的代表性未变化建筑物屋顶作为样本。统计对应建筑物屋顶中心之间的距离及中心连线的方位角,以此作为判断变化建筑物的依据。这里两时相中同一建筑物屋顶中心的图面距离即为该建筑物的视差值。视差方向与坐标北方向的夹角定义为视差方位角。
将 图1(a)中△P 1aG 1aS 1a平移到 图1(b)中,令G 1a与G 2a重合。由于视差及太阳入射角的差异,此时P 1aG 1a与P 2aG 1a不重合,G 1aS 1a与G 1aS 2a也不重合。 图1中其他几何特征三角形也做类似处理,为了方便讨论仅保留建筑物a和建筑物c的几何特征三角形,并删去遥感影像底图,如 图4所示。由几何特征三角形特性可推导出△P 1aP 2aG 1a~△P 1cP 2cG 1c。 图4中P 1aP 2a为建筑物a在两期影像中的视差。我们知道,在同一幅遥感影像中建筑物阴影长度与建筑物高度成正比,而在两期影像中建筑物视差的大小也与建筑物高度成正比。由此可以在已知建筑物的视差大小及阴影长度时,推求待检测建筑物可能的视差值及方位角,其计算公式如下:
图4
其中: P i和 L si分别为待检测建筑物的视差值和该建筑物在时相1中的阴影长度, P j和 L sj分别为样本建筑物的视差值和该建筑物在时相1中的阴影长度。 α为视差的方位角, C 1a和 R 1a分别为建筑物 a的屋顶中心在时相1中的列号和行号, C 2a和 R 2a分别为建筑物 a的屋顶中心在时相2中的列号和行号。
需要说明的是,在双时相影像中所有建筑物的视差方位角相同。而视差的大小却是与建筑物高低成正比变化。因此,视差方位角只需计算一次,视差却需要根据不同建筑物的阴影长度情况分别计算。视差值可由公式(4)计算获得。
2.3.5 建筑物变化分析
由前文方法对前后两时相影像提取建筑物屋顶,进行变化分析,其基本思路为:逐一比较前后两时相建筑物屋顶的位置关系及面积,判断其具体变化情况。大致分为4种情况:
(1)当影像上某一位置,在两时相中都检测到了建筑物,且屋顶中心距离、方位角及屋顶面积差满足公式(6),则判定该建筑物未发生变化。
其中: C 1i和 R 1i分别为建筑物 i的屋顶中心在时相1中的列号和行号, C 2i和 R 2i分别为建筑物 i的屋顶中心在时相2中的列号和行号, P i是由公式(4)推算得到的建筑物 i在两时相影像中的视差值; S 1i和 S 2i为建筑物 i在两时相影像中的屋顶面积; α是由公式(5)计算得到的视差方位角; δ P、 δ α、 δ S为阈值,其取值大小受影像配准精度及阴影、建筑物提取精度影响。影像配准精度及阴影、建筑物提取精度越高,阈值取值越小。
(2)当时相1影像中某一位置检测到了建筑物,在时相2中按视差值 P i及方向角 α推测的可能位置并未检测到建筑物,则时相1中建筑物判定为建筑物消失。
(3)相反,当时相2影像中某一位置检测到了建筑物,在时相1中未找到与之面积相近且位置重叠的建筑物,则时相2中建筑物判定为新增建筑物。
(4)当影像上某一位置,在两时相中都检测到了建筑物,但屋顶中心距离远大于阈值 δ P,且面积差异也远大于阈值 δ S,则时相2中建筑物判定为改建建筑物。
3 实验结果及分析
3.1 实验数据
选取甘肃省兰州市城区某地作为实验区如 图5所示。所选的遥感影像为WorldView-2高分辨率遥感影像,分别拍摄于2015年7月和2016年6月。前后两时相影像均为影像融合后的RGB三波段影像,空间分辨率为0.5 m。拍摄时间都是夏季,时相基本一致,且实验区无云覆盖,成像清晰,可满足建筑物变化检测实验的要求。经过精密的地面点位影像配准后,配准误差控制在2个像元以内。 图5中红色框标注的A1(A2)、B1(B2)区为从两时相影像中选取的建筑物样本区,其中B1、B2为多层建筑,6层居民楼;A1、A2为高层建筑,15层居民楼。C1(C2)区为明显建筑变化区,既有多层建筑也有高层建筑,具有一定的代表性。
图5

图5
实验区1高分辨率遥感影像
Fig.5
High resolution remote sensing images of experimental area 1
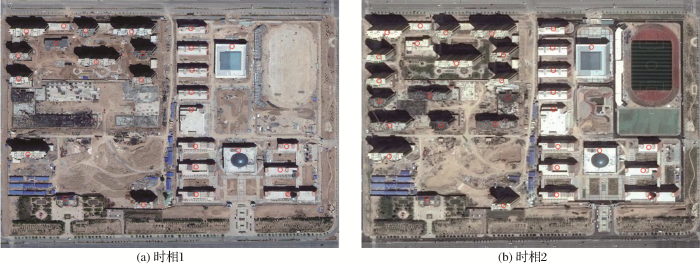
图6
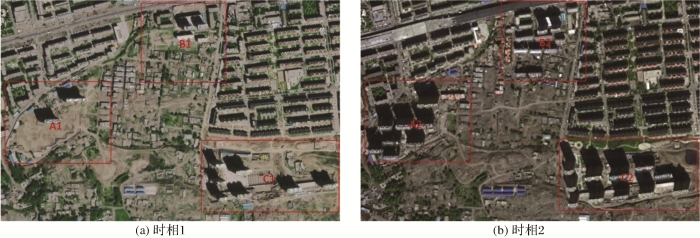
图6
实验区2高分辨率遥感影像
Fig.6
High resolution remote sensing images of experimental area 2
3.2 参数计算
利用建筑物样本可以求得各时相影像的阳光入射角 θ、视差方位角 α、以及某一高度建筑物在两时相影像中的视差值 P。这里,视差值P不是一个固定值,会随着建筑物的高度不同而变化。实验区1时相1中阴影长度为21.87的建筑物对应的视差值P为7.8。
表1 样本建筑物各项参数
Table 1
| 时相1 θ1(°) | 时相2 θ2(°) | α(°) | P(像元) | δ P(像元) | δ α(°) | δ S(像元) |
|---|---|---|---|---|---|---|
| 15.3 | 3.8 | -61.05 | 7.8 | 3.3 | 5.1 | 55.87 |
3.3 建筑物中心选取结果
图7
从 图7中可以看到,所有估计的建筑屋顶中心都落在了实际屋顶上。由于建筑物宽度的变化以及阴影提取误差,部分估计位置并不是屋顶的中心位置,而是屋顶靠近阴影的边界附近。再利用估计的屋顶中心位置,取8邻域或24邻域作为屋顶种子区域,仍然是在屋顶范围内。因此,这种位置估计偏差并不影响屋顶种子区域的自动选取。本文实验取屋顶中心24邻域范围作为屋顶提取的种子区。
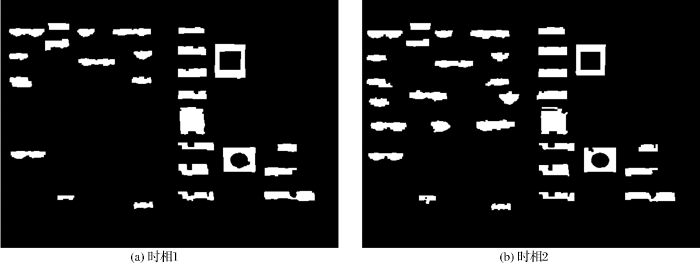
3.4 建筑屋顶提取结果及变化检测
利用自动选取的屋顶种子区域结合区域生长法进行建筑物屋顶提取,结果如 图8所示。
图8
为了便于分析,将两时相影像进行叠加后,仅保留了所提取建筑物屋顶轮廓线,如 图9所示。图中红色轮廓线为时相1提取的建筑屋顶,蓝色轮廓为时相2提取的建筑屋顶。右侧屋顶为多层建筑,两时相屋顶几乎吻合;而左侧为高层建筑区,视差影响明显,屋顶套合出现了一定程度的偏差。
图9
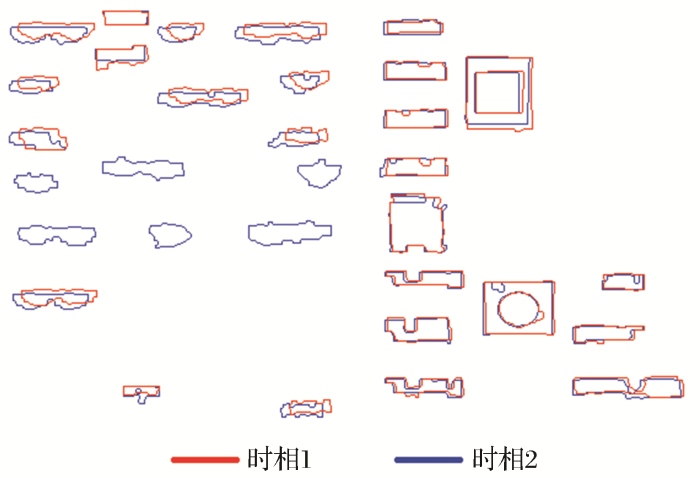
图10
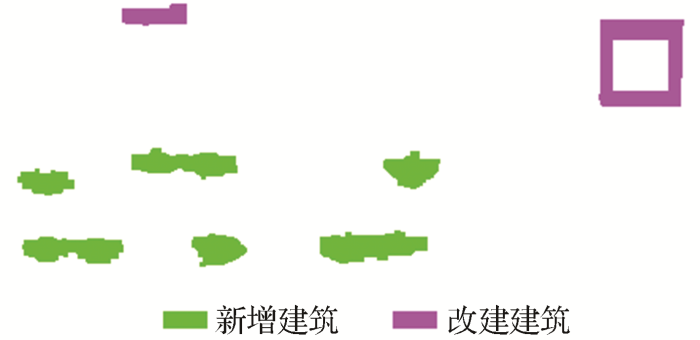
3.5 精度评价
将实验区1和实验区2的变化检测结果统一采用文献[ 25]提出的变化检测评价方法进行评价。具体计算方法如下:
其中: P td表示变化检测正确率, P fd表示虚检率, P od表示漏检率; C t为研究区域中真实变化建筑物总数, C d为实验检测出的变化建筑物总数, C td为检测出的真实变化建筑物总数, C fd为实际没有发生变化却被检测为变化的虚检建筑物数量, C od为漏检的真实变化建筑物。
表2 精度评价数值表
Table 2
| P td/% | P fd/% | P od/% | |
|---|---|---|---|
| 实验区1 | 100 | 25 | 0 |
| 实验区2 | 87 | 13 | 13 |
| 总体 | 89.6 | 16.1 | 10.3 |
从 表2及检测结果来看,大多数发生变化的建筑物都被检测出来,这与本文方法充分利用阴影与建筑物的相邻关系有很大的关系。高分影像中阴影能够很容被检测出来,而高层建筑又都有明显的阴影伴随。因此,实验中所有高层建筑物都被准确地检测出来。也正是因为该方法对阴影的依赖性,在实验2中部分低矮建筑没有阴影,而被漏检,直接影响了检测正确率和漏检率。此外,由于部分建筑屋顶与周边地面光谱接近,或有些建筑被更高的建筑遮挡了部分屋顶等一些特殊情况的存在,导致提取的屋顶边界与真实情况有较大差异,这是引起实验中虚检率较高的主要原因。
4 结 语
本文以几何特征三角形特性为基础,针对城区高分辨率遥感影像建筑物变化检测的难点问题,从建筑阴影入手,分析了阴影与建筑位置关系、阴影与视差关系,提出了一种顾及视差的建筑物变化检测方法。
实验结果表明:相对于多数已有建筑物变化检测方法,本文方法简单有效、计算复杂度低且相关参数易获得,能够有效解决建筑屋顶种子区域自动选取及高层建筑视差引起误检测等难点问题。在兰州市WorldView-2遥感影像和乌鲁木齐市WorldView-2及IKONOS遥感影像上实验,建筑物变化检测平均正确率达89.6%。
但在建筑屋顶光谱不均匀或建筑周边地面光谱与屋顶光谱非常接近时,仍然较难准确地提取建筑屋顶,这也是造成后续变化分析误判的重要原因之一。针对这一问题目前还未有较好的解决办法,这也将是下一步研究的重要内容。此外,本文方法并不适合建筑密集区,阴影被建筑物自身遮挡或阴影落在其他建筑物上的情况,对低矮建筑阴影不明显的情况也不适用。
参考文献
Extraction of Earthquake Damage Buildings from Multi-source Remote Sensing Data based on Corralation Change Detection and Boject-oriented Classfication Techniques
[J].
基于相关变化检测与面向对象分类技术的多源遥感图像震害信息提取
[J],
Change Detection Using High Spatial Resolution Remote Sensing Images for Illegal Land Use Extraction
[J],
高空间分辨率遥感影像下的违法用地变化检测
[J].
Graph Cut Energy Driven Earthquake-damaged Building Detection from High-resolution Remote Sensing Images
[J].
图割能量驱动的高分辨率遥感影像震害损毁建筑物检测
[J].
Forest Change Detection Using Remote Sensing Image based on Object-oriented Change Vector Analysis
[J].
基于面向对象变化向量分析法的遥感影像森林变化检测
[J].
. Detection of Changes in Semi-natural Grasslands by Cross Correlation Analysis with WorldView-2 Images and New Landsat 8 Data
[J].
Building Change Detection From Multitemporal High-resolution Remotely Sensed Images based on a Morphological Building Index
[J].
Combining the Pixel-based and Object-based Methods for Building Chang Detection Using High-resolution Remote Sensing Image
[J].
A Change Detection Method for Buildings based on Structural Similarity and Line Extraction
[J].
徐安建, 罗军凯, 张凯
基于结构相似性与直线提取的建筑物变化检测方法
[J].
, Building Change Detection with RGB-D Map Generated from UAV Images
[J].
A Recognition and Change Detection Method for Buildings in Remote Sensing Images
[J].
遥感图像建筑物识别及变化检测方法
[J].
Building Change Detection Based on Satellite Stereo Imagery and Digital Surface Models
[J].
Building Extraction and Change Detection in Multitemporal Remotely Sensed Images with Multiple Birth and Death Dynamics
[C]∥Snowbird
A Method for Shadow Detection and Change Detection of Man-made Objects
[J].
一种基于阴影检测的建筑物变化检测方法
[J].
Change Detection of Residential Area by Remote Sensing Image based on LBP/C Texture
[J].
张剑清, 佘琼, 潘励
基于LBP/C纹理的遥感影像居民地变化检测
[J].
Object-oriented Method of Hierarchical Urban Building Extract ion from High-resolution Remote-Sensing Imagery
[J].
面向对象的高分辨率遥感影像城区建筑物分级提取方法
[J].
Building Boundary Extraction Using Very High Resolut ion Images and LiDAR
[J].
LiDAR辅助下利用超高分辨率影像提取建筑物轮廓方法
[J].
Building Change Detection in Multitemporal Very High Resolution SAR Images
[J].
Fusion of Multispectral Imagery and DSMs for Building Change Detection Using Belief Functions and Reliabilities
[J].
A Building Change Detection Method Considering Projection Influence based on Spectral Feature and Texture Feature
[J].
一种运用纹理和光谱特征消除投影差影响的建筑物变化检测方法
[J].
Fault-tolerant Building Change Detection from Urban High-resolution Remote Sensing Imagery
[J].
Patch Matching and Dense CRF-based Co-Refinement for Building Change Detection from Bi-Temporal Aerial Images
[J].
Urban Change Detection under Large View and Illumination Variations
[J].
李炜明, 吴毅红, 胡占义
视角和光照显著变化时的变化检测方法研究
[J].
Shadow Analysis in High-resolution Satellite Imagery of Urban Areas
[J].
An Automatic Shadow Detection Method for Remote Sensing Images based on Gray Histogram
[J].
于东方, 殷建平, 张国敏
一种基于灰度直方图的遥感影像阴影自动检测方法
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}