1 引 言
土壤水分在全球水循环和地—气能量交互过程中发挥着关键作用,准确的土壤水分信息是支持气候演变、天气预报、灾害监测以及农业生产等研究与应用的重要基础[1 ,2 ,3 ,4 ,5 ,6 ,7 ] 。2009年11月ESA(European Space Agency)发射了土壤水分(和海洋盐度)专题卫星SMOS(Soil Moisture and Ocean Salinity),它采用L波段被动微波、多角度、全极化观测方式,通过对算法的集成实现了土壤水分数据产品的业务化生产,开辟了快速获取全球土壤水分信息的新途径[8 ] 。
针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究。Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究。这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分。针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究。Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究。
SMOS土壤水分反演算法主要由亮度温度(亮温)正向模拟和土壤水分反向求解两部分组成。亮温正向模拟主要描述地面端微波辐射经过植被和大气衰减到达辐射计天线端的整个辐射传输过程。土壤水分反向求解是将模拟亮温与传感器所获取的观测亮温构建代价函数并通过一定的计算方法使其收敛从而求解土壤水分的过程。
SMOS对土壤水分的求解方法为,将土壤水分作为待求量,并给出某一初始值,对代价函数进行矩阵运算快速获得关于土壤水分的调整值、即步长,从而相继调整亮温模拟、代价函数,直至满足预设的收敛条件或迭代次数,停止计算、输出土壤水分反演结果。本文就是针对以上过程,从代价函数、矩阵运算和迭代求解3个方面调整反演策略,研究其对土壤水分反演的量化影响。
2 土壤水分反演方法
2.1 亮温模拟
SMOS对亮温模拟主要基于L-MEB模型[22 ] (L-band Microwave Emission of the Biosphere),如式(1),将一般性辐射传输方程表达为大气辐射、宇宙背景辐射和地表微波辐射3部分构成:
T B p = T B a t u + T B s p e x p ( - τ a t u ) + [ T B a t d + T B s k e x p ( - τ a t d ) ] *
r s p e x p ( - τ a t u ) (1)
其中:下标p T B a t u T B a t d τ a t u τ a t d T B s k T B s p e s p e s p = 1 - r s p T s r s p θ
T B s p = e s p T s (2)
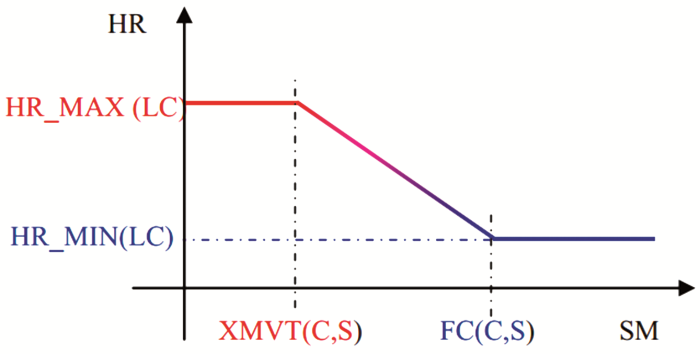
r s p ( θ ) = ( ( 1 - Q R ) r b p + Q R * r b q ) e x p ( - H R ( S M ) c o s N p ( θ ) ) (3)
其中:Q R H R ( S M ) S M N p r b p r b q ε H R 图1 [23 ] ,F C ( C , S ) X M V T ( C , S )
r b H ( θ ) = c o s ( θ ) - ε - s i n 2 ( θ ) c o s ( θ ) + ε - s i n 2 ( θ ) 2 r b V ( θ ) = ε c o s ( θ ) - ε - s i n 2 ( θ ) ε c o s ( θ ) + ε - s i n 2 ( θ ) 2 (4)
图1
图1
土壤水分和地表粗糙度函数关系[23 ]
Fig.1
Function of soil moisture and surface roughness[23 ]
F C ( C , S ) = 0.3 - 0.0023 ⋅ S + 0.005 ⋅ C (5)
X M V T ( C , S ) = C X M V T 1 ⋅ W P ( C , S ) + C X M V T 2 (6)
W P ( C , S ) = C W P 1 + C W P 2 ⋅ S + C W P 3 ⋅ C (7)
由于SMOS所采用的L波段为低频率微波频段,受大气影响较小,在实际应用中可认为大气上、下行辐射近似相等;同时,针对覆有植被的一般性地表,需考虑植被的微波辐射贡献,则辐射传输方程可更精细地表达为:
B p = T B a t u + e x p ( - τ a t u ) ( T B a t u + T B s k e x p ( - τ a t u ) ) r s p ⋅ e x p ( - 2 τ a t u ) + e x p ( - τ a t u ) [ e s p T g e x p ( - τ c ) + T c ( 1 - ω ) ⋅ ( 1 - e x p ( - τ c ) ) ( 1 + r s p e x p ( - τ c ) ) ] (8)
其中:T g T c ω τ c T g T s o i l _ s u r f T s o i l _ d e p t h [24 ] ;对于植被温度,根据SMOS过境时刻(早、晚6:00)近地面温度、土壤温度、植被温度三者近似相等这一假设,可通过气温来进行简单估算[23 ] ;植被光学厚度τ c τ s p τ l τ i p 3 部分光学厚度,如式(11),对于SMOS所称的低矮植被(Low Vegetation),其光学厚度τ s p L A I [25 ] ,如式(12),其中b ' s b ' ' s τ s _ n a d τ l τ i p [26 ,27 ,28 ,29 ] ,在此不做详述。针对以上参数,由于无法获得具体设置的数值,本文在模拟亮温时直接采用SMOS给出的建议值[30 ] ,如表1 所示。
T g = T s o i l _ d e p t h + C t ⋅ ( T s o i l _ s u r f - T s o i l _ d e p t h ) (9)
C t = m i n { ( S M / w 0 ) b w 0 , 1 } (10)
τ c = τ s p + τ l + τ i p (11)
τ s h ( θ = 0 ) = t s v ( θ = 0 ) = τ s _ n a d = b ' s ⋅ L A I + b ' ' s (12)
2.2 土壤水分反演
SMOS采用Levenberg–Marquardt(L-M)迭代算法[31 ] 来求解土壤水分。首先,构建观测亮温T B i m e a s T B i s i m
χ 2 = ∑ i = 0 N - 1 ( T B i m e a s - T B i s i m ) 2 σ T B i 2 + ∑ j = 0 M - 1 ( P j - P j 0 ) 2 σ P j 2 (13)
其中:σ T B i 2 N P j P j 0 σ P j 2 M
代价函数构建以后,将通过Jacobian矩阵(式(14))、Gradient矩阵(式(15))和Hessian矩阵(式(16))进行计算,求取待反演参数的调整值、即步长∆
J a c o b i a n = ∂ ( T B i m e a s - T B i s i m ) ∂ P j i = 0 ⋯ N - 1 j = 0 ⋯ M - 1 (14)
G r a d i e n t = J a c o b i a n [ C O V Z ] - 1 Δ T B T Δ T B = T B 0 m e a s - T B 0 s i m T B 1 m e a s - T B 1 s i m ⋮ T B N - 1 m e a s - T B N - 1 s i m C O V Z = C O V T 0 0 C O V P (15)
H e s s i a n = J a c o b i a n [ C O V Z ] - 1 J a c o b i a n T (16)
Δ = ( 1 + μ ) H e s s i a n - 1 G r a d i e n t (17)
2.3 土壤水分反演策略调整
SMOS决定反演是否完成的设置条件为步长小于0.005 m³/m³或迭代次数达到10次[30 ] 。以上复杂的矩阵运算就在于获取不定步长使得代价函数快速收敛,而从迭代次数来看,对待求参数数值的调整主要是围绕先验值的少量局部搜索。
本文只对土壤水分进行反演,采用单角度观测亮温(SMOS L1C,42.5°),可将代价函数做以简化(式(18))。为避免复杂的矩阵运算,以0.001 m³/m³的固定步长来代替不定步长;同时,为了避免过于依赖先验值,将搜索扩展至0~0.05 m³/m³的土壤水分全区间。
χ 2 = ( T B i m e a s - T B i s i m ) 2 σ T B i 2 (18)
针对亮温模拟,由于无法获得SMOS关于土壤质地(AUX_DFFSOI)和地表覆被类型(AUX_LANDCL)的辅助数据,本文使用ISRIC(International Soil Reference Information Center)土壤信息和FROM-GLC(Finer Resolution Observation And Monitoring Global Land Cover)地表分类数据来进行替代。为了准确判定反演策略调整的有效性、剥离因参数替换对土壤水分反演所造成的影响,设计两种土壤水分反演方案:①参数替换的亮温模拟和未调整的土壤水分反演;②参数替换的亮温模拟和调整的土壤水分反演。
3 数据及处理
本研究需使用的数据主要有:USCRN(U.S.Climate Reference Network)土壤水分和降水实测数据、SMOS L1C亮温数据(SM_OPER_MIR_ SCLF1C_*)、L2土壤水分数据(SM_REPR_ MIR_SMUDP2_*)、L2辅助数据(SM_OPER_ AUX_ECMWF_*)、ISRIC土壤信息和FROM-GLC地表分类数据,这些数据均可免费下载。
3.1 USCRN地面实测数据
美国气象参考网USCRN(http:∥www.ncdc.noaa. gov/crn)长期监测美国地区(包括阿拉斯加和夏威夷)的气温、降水、土壤水分和太阳辐射等气象参数,数据分月级(Monthly)、日级(Daily)、小时级(Hourly)以及亚小时级(5 min,Sub-hourly)。本文使用小时级数据,该数据所含的具体参数如表2 所示。
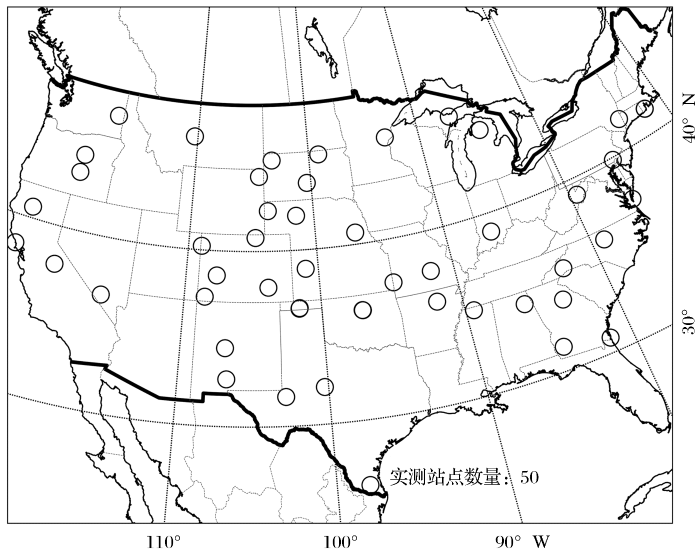
为保证数据质量,需要对实测站点进行完整性和有效性筛选。完整性筛选在于,按照每小时一条观测记录,全年总记录数应为8 760(平年,365×24)或8 784(闰年,366×24),满足此条件的站点予以保留。有效性筛选是指,在4~9月这一时段(全部参数)有效记录(非-99.000或-9 999.0)数量超过总记录数一半(183×24×50%)的站点予以保留。各年份站点总数和通过质量控制的站点数量的分布情况如表3 ,为了保证充足的数据量,参考2012~2018年这一时段,本文选用分布于美国大陆地区的50个长期、稳定的观测站点(图2 ),需使用的参数有5 cm土壤水分(SOIL_MOISTURE_5)、降水量(P_CALC)。其中土壤水分被作为参考值,与SMOS和本文反演土壤水分结果进行比较,降水量被作为环境条件展示,未参与任何计算。在此需说明的是,由于后期还将与卫星和其他来源的数据进行时空匹配,最终满足条件的站点数量为44个。
图2
图2
站点空间分布
Fig.2
Spatial distribution of the sites used in the study
3.2 SMOS卫星数据
(1) L1C亮温数据:SMOS主要以Level 1C(L1C)级数据的形式存储多角度(约0~60°)、全极化亮温,按照ISEA 4H9(Icosahedral Snyder Equal Area projection with aperture 4 resolution 9)网格系统对数据进行空间组织。本文所需的L1C数据内容有亮温(BT,42.5°)、法拉第旋转角(Faraday rotation angle)、几何旋转角(Geometric rotation angle),其中亮温用于构建代价函数,角度信息用于进行亮温极化方式转换计算。
(2) L2土壤水分数据:SMOS以Level 2(L2)级数据的形式存储土壤水分(及其他)反演结果。由于以L1C亮温数据为输入,L2数据的时间和空间组织方式与L1C亮温数据一致。本文所需的L2数据内容主要是土壤水分(Soil Moisture),用于与地面实测和本文反演土壤水分的对比分析。
(3) L2辅助数据:本文使用的L2辅助数据是指ECMWF (European Centre for Medium-range Weather Forecasting)为其定制的气象辅助数据,它的时间和空间组织方式与L1C亮温数据和L2土壤水分数据一致。本文所需的内容有表面温度(Skin_Temperature)、土壤温度(Soil_Temperature_L1,1~7 cm、L3,28~100 cm)和土壤水分(Scaled_Volumetric_Soil_Water_L1),这些辅助数据主要用于为亮温模拟和土壤水分反演提供初始值。
3.3 其他辅助数据
土壤质地数据来自于联合国粮农组织(Food and Agriculture Organization of the United Nations)土壤参考信息中心ISRIC(International Soil Reference Information Center)的土壤格网数据SoilGrids(https://www.isric.org/ )。SoilGrids是一个利用全球土壤剖面信息和环境变量数据来模拟全球土壤属性空间分布的数字制图系统。本文使用250 m分辨率、5 cm深度的砂土、粘土含量数据,用于参与亮温模拟。
地表类型数据来自于FROM-GLC(Finer Resolution Observation and Monitoring Global Land Cover)地表分类数据(http://data.ess.tsinghua.edu.cn ),它是基于Landsat卫星数据制作而成,分辨率为10 m,共分10个类型(表4 )。本文将其中的农田、草地、灌木合并为低矮植被类型,只针对裸地、低矮植被和森林这3种类型的地表进行土壤水分反演。
需要说明的是,本文所使用的数据各自具有不同的时间和空间组织方式,为了实现统一,以USCRN实测数据为参照,按照时间上与其日期相同、整点时刻最接近、空间上与其距离最邻近(站点对格点中心,根据Haversine公式)的原则,选用SMOS卫星数据和其他数据,其中,实测站点与其最邻近的SMOS格点中心的最小、平均和最大距离分别为0.69、5.07、9.67 km。由于SMOS L1C数据文件较大、下载时间较长,为尽快证实反演策略调整的可行性和有效性,本文仅针对2018年4~9月这一时段进行土壤水分反演实验分析。
4 结果与分析
以平均绝对偏差(Mean Absolute Deviation,MAD)、均方根误差(Root Mean Squared Error,RMSE)、无偏均方根误差(Unbiased Root Mean Square Error,ubRMSE)和决定系数R 2 作为评定反演结果的指标。
为判定调整方法的有效性,本文设计了两种土壤水分反演方案,分别为参数替换的亮温模拟与未调整的土壤水分反演(方案一)、参数替换的亮温模拟与调整的土壤水分反演(方案二)。将USCRN土壤水分实测值作为参照,两种方案对土壤水分的反演结果与SMOS官方反演结果相比,总体表现如表5 。针对MAD、RMSE、ubRMSE3项指标设置以下比较方案:
负值表示提升、正值表示降低。可见,方案一较SMOS仅在ubRMSE指标上略有改进(3.44%),方案二较SMOS和方案一在3项指标上均有明显改进(10.71%/13.04%、13.53%/12.88%、22.99%/20.24%)。其中R 2 偏低的原因可能在于研究时段较短(2018年4~9月),同时多源数据对各站点的时间和空间匹配情况不同,样本数量不足且不等(38~229),导致R 2 计算总体偏低。初步来看,土壤质地和地表覆被类型这两项参数替换对土壤水分反演精度的提升效果有限,对反演策略调整的可行性和有效性得到了证实。
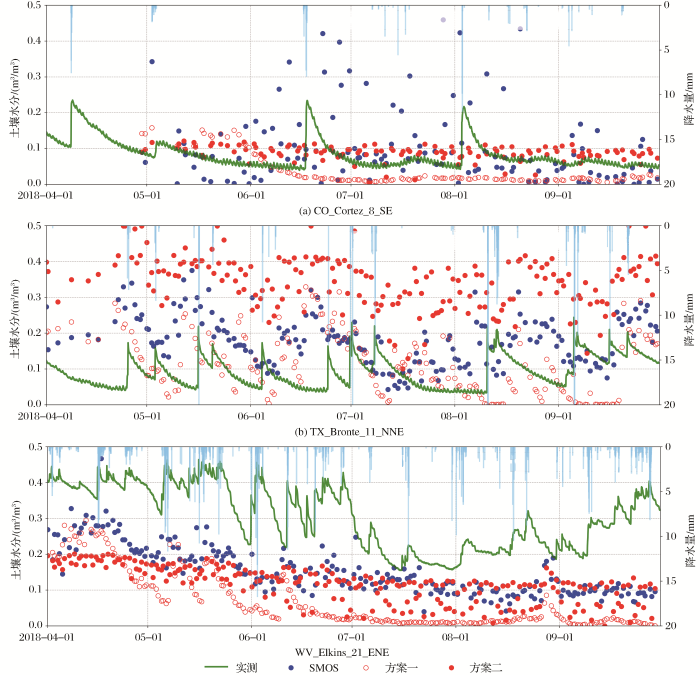
对方案二在各站点的反演结果进行总体排序,在此给出MAD、RMSE、ubRMSE 3项最好(CO_Cortez_8_SE)、MAD、RMSE 2项最差(TX_Bronte_11_NNE)和2项次差(WV_Elkins_21_ENE)的3个代表性站点,土壤水分的数值分布如图3 、各指标数值情况如表6 。
图3
图3
3个站点的土壤水分反演结果
Fig.3
Soil moisture inversion results at three sites
从表现最好的站点来看(CO_Cortez_8_SE),该地地表覆被类型为低矮植被,土壤水分总体上小于0.1 m³/m³、降水频次和单次降水量均不高。SMOS在此地的反演结果表现出“对低值的估计过低、对高值的估计过高”两种极端特征。通过方案一对该地土壤质地和地表分类信息更新后,在5、6月降水较少的这一时段,低估情况稍有改善,但随着7~9月降水密集分布,低估更为严重。由此可初步推断,改换土壤质地和地表分类这种相对“静态”的辅助信息对土壤水分反演精度的提升效果不明显。而通过方案二对代价函数、迭代步长、搜索区间等关键反演计算过程进行调整后结果明显得到改善,一定程度上反映出SMOS对土壤水分的反演计算受控于先验土壤水分、降水等气象类“动态”辅助信息,对此环节的改进确有必要。
从表现最差的站点来看(TX_Bronte_11_NNE),该地地表覆被类型为森林,土壤水分总体上亦小于0.1 m³/m³,但降水具有明显的长期分散、短期集中、单次强度大的特点,因此,从实测数据来看,土壤水分受降水影响表现出非常典型的急速升高和缓慢回落的变化趋势。SMOS对该地土壤水分的反演结果也反映出这种对降水的响应,但与CO_Cortez_8_SE站点相似的,对此类土壤水分本就偏低的地区,其高估情况仍较为突出。方案一对土壤水分的反演高估情况做出了一定的抑制但低估情况重现。方案二对土壤水分的反演结果远高于实测值,对降水影响的反应不明显,总体表现较差。其原因可能在于为减弱对先验土壤水分的依赖性,将搜索区间扩展至0~0.05 m³/m³的宽域或使得代价函数的收敛条件提前满足,导致反演不准确。
从表现次差的站点来看(WV_Elkins_21_ENE),该地地表覆被类型也为森林,但土壤水分总体上处于0.2~0.4 m³/m³的较高水平,降水频率高、强度大。SMOS对该地土壤水分的反演偏低,能捕捉到少量的降水过程。方案一对降水的反应较SMOS稍强,但偏低情况更为严重。至此可初步推断,SMOS对土壤质地和地表覆被类型这类“静态”辅助信息的设置不可靠,改换这些参数只能以线性方式“拉回”土壤水分反演值,在土壤水分低于0.1 m³/m³或高于0.2 m³/m³这种偏低、偏高情况下,都不能获得理想的反演结果。方案二在该地的反演结果好于方案一、接近SMOS,在一定程度上也表明,针对森林类地表、降水丰富的地区,调整反演策略对土壤水分反演精度的提升效果相对有限,侧面上反映出,反演误差的来源可能在于观测亮温、模拟亮温、参数建模以及辅助信息等一系列上游环节,还需要进一步深入的研究。
5 结 语
准确的土壤水分信息是支撑地球系统科学研究的关键基础,以SMOS为代表的星载微波遥感开辟了快速获取大范围土壤水分信息的途径,为了优化其算法体系、提升反演精度,本文针对SMOS土壤水分反向求解过程,从代价函数构建、步长计算、迭代搜索这3个方面进行了策略调整,初步证实了该方法的可行性和有效性,研究的主要发现有:
(1)SMOS对森林类地区的参数设置不可靠,替换土壤质地和地表覆被类型这类“静态”辅助信息能够改善土壤水分反演精度,但程度有限。
(2)通过在迭代求解环节对代价函数、计算步长、搜索区间的简化,能够有效地改善土壤水分反演精度,对这一环节的改进可行且确有必要。
(3)简化方法对土壤水分反演精度的提升还不具有空间普适性,在某些地区表现不尽理想,亮温正向模拟环节或是导致土壤水分反演精度不高的主要原因。
本文尝试在土壤水分反向求解环节进行改进,证实调整反演策略的可行性和有效性,为被动微波土壤水分反演不确定性研究提供了实践支持。研究中的不足之处主要在于,在亮温正向模拟环节部分关键参数采用的是SMOS提供的参考值,在辅助信息上没能完全与其一致,有关于SMOS算法可靠性的推断还需要更多的实验分析支持;研究时段较短,对降水影响的分析以定性为主,在调整反演策略后,反演结果对降水的响应出现未知原因的明显降低,对此还需补充更多的量化研究;着重分析迭代求解的结果,缺乏对计算稳定性、速度等多项指标的跟踪和分析,应在后续研究中予以完善。
参考文献
View Option
[1]
Lin Libin , Bao Yansong , Zuo Quan ,et al .Soil Moisture Retrieval over Vegetated Areas based on Sentinel-1 and FY-3C Data
[J].Remote Sensing Technology and Application ,2018 ,33 (4 ):750 -758 .林利斌,鲍艳松 ,左泉 , 等 .基于Sentinel-1与FY-3C数据反演植被覆盖地表土壤水分
[J].遥感技术与应用 ,2018 ,33 (4 ):750 -758 .
[本文引用: 1]
[2]
Brocca L , Ponziani F , Moramarco T ,et al .Improving Landslide Forecasting Using ASCAT-derived Soil Moisture Data: A Case Study of the Torgiovannetto Landslide in Central Italy
[J].Remote Sensing ,2012 ,4 (5 ):1232 -1244 .
[本文引用: 1]
[3]
Brocca L , Melone F , Moramarco T ,et al .Improving Runoff Prediction Through the Assimilation of the ASCAT Soil Moisture Product
[J].Hydrology and Earth System Sciences ,2010 ,14 (10 ):1881 -1893 .
[本文引用: 1]
[4]
Rahmani A , Golian S , Brocca L .Multiyear Monitoring of Soil Moisture over Iran Through Satellite and Reanalysis Soil Moisture Products
[J].International Journal of Applied Earth Observation and Geoinformation ,2016 ,48 :85 -95 .
[本文引用: 1]
[5]
Entekhabi D , Rodriguez-Iturbe I , Castelli F .Mutual Interaction of Soil Moisture State and Atmospheric Processes
[J].Journal of Hydrology ,1996 ,184 (1-2 ):3 -17 .
[本文引用: 1]
[6]
Korres W , Reichenau T G , Schneider K .Patterns and Scaling Properties of Surface Soil Moisture in an Agricultural Landscape: An Ecohydrological Modeling Study
[J].Journal of Hydrology ,2013 ,498 :89 -102 .
[本文引用: 1]
[7]
Conil S , Douville H , Tyteca S .The Relative Influence of Soil Moisture and SST in Climate Predictability Explored within Ensembles of AMIP Type Experiments
[J].Climate Dynamics ,2006 ,28 (2-3 ):125 -145 .
[本文引用: 1]
[8]
Zhao Tianjie .New Development and Prospect of L-band for Soil Moisture Retrieval from Passive Microwave
[J].Advances in Geographical Sciences ,2018 ,37 (2 ):198 -213 .赵天杰
.被动微波反演土壤水分的L波段新发展及未来展望
[J].地理科学进展 ,2018 ,37 (2 ):198 -213 .
[本文引用: 1]
[9]
Jackson T J , Bindlish R , Cosh M H ,et al .Validation of Soil Moisture and Ocean Salinity (SMOS) Soil Moisture Over Watershed Networks in the U.S
[J].IEEE Transactions on Geoscience and Remote Sensing ,2012 ,50 (5 ):1530 -1543 .
[本文引用: 1]
[10]
Bitar A A , Leroux D , Kerr Y H .Evaluation of SMOS Soil Moisture Products Over Continental U.S. Using the SCAN/SNOTEL Network
[J].IEEE Transactions on Geoscience and Remote Sensing ,2012 ,50 (5 ):1572 -1586 .
[本文引用: 1]
[11]
Gherboudj I , Magagi R , Goita K ,et al .Validation of SMOS Data over Agricultural and Boreal Forest Areas in Canada
[J].IEEE Transactions on Geoscience and Remote Sensing ,2012 ,50 (5 ):1623 -1635 .
[本文引用: 1]
[12]
Dente L , Su Z , Wen J .Validation of SMOS Soil Moisture Products over the Maqu and Twente Regions
[J].Sensors ,2012 ,12 (8 ):9965 -9986 .
[本文引用: 1]
[13]
Zeng J Y , Li Z , Chen Q ,et al .Evaluation of Remotely Sensed and Reanalysis Soil Moisture Products over the Tibetan Plateau Using In-situ Observations
[J].Remote Sensing of Environment ,2015 ,163 :91 -110 .
[本文引用: 1]
[14]
Peng Jian , Niesel J , Loew A ,et al .Evaluation of Satellite and Reanalysis Soil Moisture Products over Southwest China Using Ground-based Measurements
[J].Remote Sensing ,2015 ,7 (11 ):15729 -15747 .
[本文引用: 1]
[15]
Niclos R , Rivas R , Garcia-Santos V ,et al .SMOS Level-2 Soil Moisture Product Evaluation in Rain-fed Croplands of the Pampean Region of Argentina
[J].IEEE Transactions on Geoscience and Remote Sensing ,2016 ,54 (1 ):499 -512 .
[本文引用: 1]
[16]
Xiang Yiheng , Zhang Mingmin , Zhang Lanhui ,et al .Quality Evaluation of SMOS Remote Sensing Soil Moisture Products on Different Vegetation Types in Qilian Mountains
[J].Remote Sensing Technology and Application ,2017 ,32 (5 ):835 -843 .向怡衡,张明敏 ,张兰慧 , 等 .祁连山区不同植被类型上的SMOS遥感土壤水分产品质量评估
[J].遥感技术与应用 ,2017 ,32 (5 ):835 -843 .
[本文引用: 1]
[17]
Wigneron J , Chanzy A , Kerr Y H ,et al .Evaluating An Improved Parameterization of the Soil Emission in L-MEB
[J].IEEE Transactions on Geoscience and Remote Sensing ,2011 ,49 (4 ):1177 -1189 .
[本文引用: 1]
[18]
Peng B , Zhao T J , Shi J C ,et al .Reappraisal of the Roughness Effect Parameterization Schemes for L-band Radiometry over Bare Soil
[J].Remote Sensing of Environment ,2017 ,199 :63 -77 .
[本文引用: 1]
[19]
Jiang T , Zhao K , Zheng X M ,et al .Dynamic bp in the L Band and Its Role in Improving the Accuracy of Soil Moisture Retrieval
[J].Chinese Geographical Science ,2019 ,29 (2 ):283 -292 .
[本文引用: 1]
[20]
Ebrahimi M , Alavipanah S K , Hamzeh S ,et al .Exploiting the Synergy between SMAP and SMOS to Improve Brightness Temperature Simulations and Soil Moisture Retrievals in Arid Regions
[J].Journal of Hydrology ,2018 ,557 :740 -752 .
[本文引用: 1]
[21]
Kerr Y H , Al-Yaarib A , Rodriguez-fernandeza N ,et al .Overview of SMOS Performance Intermsof Global Soil Moisture Monitoring Aftersix Years in Operation
[J].Remote Sensing of Environment ,2016 ,180 :40 -63 .
[本文引用: 1]
[22]
Wigneron J , Calvet J , de Rosnay P ,et al .L-MEB: A Simple Model at L-band for the Continental Areas-application to the Simulation of A Half-degree Resolution and Global Scale Data Set
[C]∥IEE Electromagnetic Waves Series ,2006 .
[本文引用: 1]
[23]
Kerr Y H , Waldteufel P , Richaume P ,et al .The SMOS Soil Moisture Retrieval Algorithm
[J].IEEE Transactions on Geoscience and Remote Sensing ,2012 ,50 (5 ):1384 -1403 .
[本文引用: 4]
[24]
Mo T , Choudhury B J , Schmugge T J ,et al .A Model for Microwave Emission from Vegetation‐covered Fields
[J].Journal of Geophysical Research: Oceans ,1982 ,87 (C13 ):11229 11237 .
[本文引用: 1]
[25]
de Rosnay P , Calvet J , Kerr Y ,et al .SMOSREX: A Long Term Field Campaign Experiment for Soil Moisture and Land Surface Processes Remote Sensing
[J].Remote Sensing of Environment ,2006 ,102 (3-4 ):377 -389 .
[本文引用: 1]
[26]
Grant J P , Saleh-Contell K , Wigneron J P ,et al .Calibration of the L-MEB Model over A Coniferous and a Deciduous Forest
[J].IEEE Transactions on Geoscience and Remote Sensing ,2008 ,46 (3 ):808 -818 .
[本文引用: 1]
[27]
Saleh K , Wigneron J P , Waldteufel P ,et al .Estimates of Surface Soil Moisture Under Grass Covers Using L-band Radiometry
[J].Remote Sensing of Environment ,2007 ,109 (1 ):42 -53 .
[本文引用: 1]
[28]
Putuhena W M , Cordery I .Estimation of Interception Capacity of the Forest Floor
[J].Journal of Hydrology ,1996 ,180 (1 ):283 -299 .
[本文引用: 1]
[29]
Saleh K , Wigneron J , de Rosnay P ,et al .Impact of Rain Interception by Vegetation and Mulch on the L-band Emission of Natural Grass
[J].Remote Sensing of Environment ,2006 ,101 (1 ):127 -139 .
[本文引用: 1]
[30]
Kerr Y H , Waldteufel P , Richaume P ,et al .SMOS Level 2 Processor Soil Moisture Algorithm Theoretical basis Document (ATBD)
[C]∥SM-ESL (CBSA) ,2017 .
[本文引用: 2]
[31]
Marquardt D W .An Algorithm for Least-squares Estimation of Non Linear Parameters
[J].Journal of the Society for Industrial and Applied Mathematics ,1963 ,11 :431 -441 .
[本文引用: 1]
基于Sentinel-1与FY-3C数据反演植被覆盖地表土壤水分
1
2018
... 土壤水分在全球水循环和地—气能量交互过程中发挥着关键作用,准确的土壤水分信息是支持气候演变、天气预报、灾害监测以及农业生产等研究与应用的重要基础[1 ,2 ,3 ,4 ,5 ,6 ,7 ] .2009年11月ESA(European Space Agency)发射了土壤水分(和海洋盐度)专题卫星SMOS(Soil Moisture and Ocean Salinity),它采用L波段被动微波、多角度、全极化观测方式,通过对算法的集成实现了土壤水分数据产品的业务化生产,开辟了快速获取全球土壤水分信息的新途径[8 ] . ...
Improving Landslide Forecasting Using ASCAT-derived Soil Moisture Data: A Case Study of the Torgiovannetto Landslide in Central Italy
1
2012
... 土壤水分在全球水循环和地—气能量交互过程中发挥着关键作用,准确的土壤水分信息是支持气候演变、天气预报、灾害监测以及农业生产等研究与应用的重要基础[1 ,2 ,3 ,4 ,5 ,6 ,7 ] .2009年11月ESA(European Space Agency)发射了土壤水分(和海洋盐度)专题卫星SMOS(Soil Moisture and Ocean Salinity),它采用L波段被动微波、多角度、全极化观测方式,通过对算法的集成实现了土壤水分数据产品的业务化生产,开辟了快速获取全球土壤水分信息的新途径[8 ] . ...
Improving Runoff Prediction Through the Assimilation of the ASCAT Soil Moisture Product
1
2010
... 土壤水分在全球水循环和地—气能量交互过程中发挥着关键作用,准确的土壤水分信息是支持气候演变、天气预报、灾害监测以及农业生产等研究与应用的重要基础[1 ,2 ,3 ,4 ,5 ,6 ,7 ] .2009年11月ESA(European Space Agency)发射了土壤水分(和海洋盐度)专题卫星SMOS(Soil Moisture and Ocean Salinity),它采用L波段被动微波、多角度、全极化观测方式,通过对算法的集成实现了土壤水分数据产品的业务化生产,开辟了快速获取全球土壤水分信息的新途径[8 ] . ...
Multiyear Monitoring of Soil Moisture over Iran Through Satellite and Reanalysis Soil Moisture Products
1
2016
... 土壤水分在全球水循环和地—气能量交互过程中发挥着关键作用,准确的土壤水分信息是支持气候演变、天气预报、灾害监测以及农业生产等研究与应用的重要基础[1 ,2 ,3 ,4 ,5 ,6 ,7 ] .2009年11月ESA(European Space Agency)发射了土壤水分(和海洋盐度)专题卫星SMOS(Soil Moisture and Ocean Salinity),它采用L波段被动微波、多角度、全极化观测方式,通过对算法的集成实现了土壤水分数据产品的业务化生产,开辟了快速获取全球土壤水分信息的新途径[8 ] . ...
Mutual Interaction of Soil Moisture State and Atmospheric Processes
1
1996
... 土壤水分在全球水循环和地—气能量交互过程中发挥着关键作用,准确的土壤水分信息是支持气候演变、天气预报、灾害监测以及农业生产等研究与应用的重要基础[1 ,2 ,3 ,4 ,5 ,6 ,7 ] .2009年11月ESA(European Space Agency)发射了土壤水分(和海洋盐度)专题卫星SMOS(Soil Moisture and Ocean Salinity),它采用L波段被动微波、多角度、全极化观测方式,通过对算法的集成实现了土壤水分数据产品的业务化生产,开辟了快速获取全球土壤水分信息的新途径[8 ] . ...
Patterns and Scaling Properties of Surface Soil Moisture in an Agricultural Landscape: An Ecohydrological Modeling Study
1
2013
... 土壤水分在全球水循环和地—气能量交互过程中发挥着关键作用,准确的土壤水分信息是支持气候演变、天气预报、灾害监测以及农业生产等研究与应用的重要基础[1 ,2 ,3 ,4 ,5 ,6 ,7 ] .2009年11月ESA(European Space Agency)发射了土壤水分(和海洋盐度)专题卫星SMOS(Soil Moisture and Ocean Salinity),它采用L波段被动微波、多角度、全极化观测方式,通过对算法的集成实现了土壤水分数据产品的业务化生产,开辟了快速获取全球土壤水分信息的新途径[8 ] . ...
The Relative Influence of Soil Moisture and SST in Climate Predictability Explored within Ensembles of AMIP Type Experiments
1
2006
... 土壤水分在全球水循环和地—气能量交互过程中发挥着关键作用,准确的土壤水分信息是支持气候演变、天气预报、灾害监测以及农业生产等研究与应用的重要基础[1 ,2 ,3 ,4 ,5 ,6 ,7 ] .2009年11月ESA(European Space Agency)发射了土壤水分(和海洋盐度)专题卫星SMOS(Soil Moisture and Ocean Salinity),它采用L波段被动微波、多角度、全极化观测方式,通过对算法的集成实现了土壤水分数据产品的业务化生产,开辟了快速获取全球土壤水分信息的新途径[8 ] . ...
被动微波反演土壤水分的L波段新发展及未来展望
1
2018
... 土壤水分在全球水循环和地—气能量交互过程中发挥着关键作用,准确的土壤水分信息是支持气候演变、天气预报、灾害监测以及农业生产等研究与应用的重要基础[1 ,2 ,3 ,4 ,5 ,6 ,7 ] .2009年11月ESA(European Space Agency)发射了土壤水分(和海洋盐度)专题卫星SMOS(Soil Moisture and Ocean Salinity),它采用L波段被动微波、多角度、全极化观测方式,通过对算法的集成实现了土壤水分数据产品的业务化生产,开辟了快速获取全球土壤水分信息的新途径[8 ] . ...
Validation of Soil Moisture and Ocean Salinity (SMOS) Soil Moisture Over Watershed Networks in the U.S
1
2012
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
Evaluation of SMOS Soil Moisture Products Over Continental U.S. Using the SCAN/SNOTEL Network
1
2012
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
Validation of SMOS Data over Agricultural and Boreal Forest Areas in Canada
1
2012
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
Validation of SMOS Soil Moisture Products over the Maqu and Twente Regions
1
2012
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
Evaluation of Remotely Sensed and Reanalysis Soil Moisture Products over the Tibetan Plateau Using In-situ Observations
1
2015
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
Evaluation of Satellite and Reanalysis Soil Moisture Products over Southwest China Using Ground-based Measurements
1
2015
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
SMOS Level-2 Soil Moisture Product Evaluation in Rain-fed Croplands of the Pampean Region of Argentina
1
2016
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
祁连山区不同植被类型上的SMOS遥感土壤水分产品质量评估
1
2017
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
Evaluating An Improved Parameterization of the Soil Emission in L-MEB
1
2011
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
Reappraisal of the Roughness Effect Parameterization Schemes for L-band Radiometry over Bare Soil
1
2017
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
Dynamic bp in the L Band and Its Role in Improving the Accuracy of Soil Moisture Retrieval
1
2019
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
Exploiting the Synergy between SMAP and SMOS to Improve Brightness Temperature Simulations and Soil Moisture Retrievals in Arid Regions
1
2018
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
Overview of SMOS Performance Intermsof Global Soil Moisture Monitoring Aftersix Years in Operation
1
2016
... 针对SMOS土壤水分数据(Level 2级,L2),国内外学者展开了广泛的验证研究.Jackson等[9 ,10 ,11 ,12 ,13 ,14 ,15 ,16 ] 先后在美国、加拿大、荷兰、阿根廷、我国青藏高原和西南地区,针对农田、草地和森林等不同地表覆被类型的地区,利用地面实测数据对SMOS土壤水分数据进行了验证研究.这些研究发现,SMOS对土壤水分的求算在部分地区基本达到其设定的精度目标(0.04 m3 /m3 ),但总体上低于实测土壤水分.针对地表微波辐射建模和土壤水分反演,Wigneron等[17 ,18 ,19 ,20 ] 分别对土壤粗糙度、植被含水量和植被光学厚度等参数进行了研究.Kerr等[21 ] 评述了SMOS的运行情况和数据及算法的更新、演变,指出最新版的数据(V620)较之前(V551)有较大改进,SMOS对土壤水分的反演达到其预设目标并在全球表现出一致性,但也表明,辅助信息特别是地表分类数据对局部地区的表征不准确或是影响土壤水分反演精度的主要原因之一,需要持续跟进相关算法研究. ...
L-MEB: A Simple Model at L-band for the Continental Areas-application to the Simulation of A Half-degree Resolution and Global Scale Data Set
1
2006
... SMOS对亮温模拟主要基于L-MEB模型[22 ] (L-band Microwave Emission of the Biosphere),如式(1),将一般性辐射传输方程表达为大气辐射、宇宙背景辐射和地表微波辐射3部分构成: ...
The SMOS Soil Moisture Retrieval Algorithm
4
2012
... 其中:Q R H R ( S M ) S M N p r b p r b q ε H R 图1 [23 ] ,F C ( C , S ) X M V T ( C , S )
... [
23 ]
Function of soil moisture and surface roughness<sup>[<xref ref-type="bibr" rid="R23">23</xref>]</sup> Fig.1 ![]()
F C ( C , S ) = 0.3 - 0.0023 ⋅ S + 0.005 ⋅ C (5) X M V T ( C , S ) = C X M V T 1 ⋅ W P ( C , S ) + C X M V T 2 (6) W P ( C , S ) = C W P 1 + C W P 2 ⋅ S + C W P 3 ⋅ C (7) 由于SMOS所采用的L波段为低频率微波频段,受大气影响较小,在实际应用中可认为大气上、下行辐射近似相等;同时,针对覆有植被的一般性地表,需考虑植被的微波辐射贡献,则辐射传输方程可更精细地表达为: ...
... [
23 ]
Fig.1 ![]()
F C ( C , S ) = 0.3 - 0.0023 ⋅ S + 0.005 ⋅ C (5) X M V T ( C , S ) = C X M V T 1 ⋅ W P ( C , S ) + C X M V T 2 (6) W P ( C , S ) = C W P 1 + C W P 2 ⋅ S + C W P 3 ⋅ C (7) 由于SMOS所采用的L波段为低频率微波频段,受大气影响较小,在实际应用中可认为大气上、下行辐射近似相等;同时,针对覆有植被的一般性地表,需考虑植被的微波辐射贡献,则辐射传输方程可更精细地表达为: ...
... 其中:T g T c ω τ c T g T s o i l _ s u r f T s o i l _ d e p t h [24 ] ;对于植被温度,根据SMOS过境时刻(早、晚6:00)近地面温度、土壤温度、植被温度三者近似相等这一假设,可通过气温来进行简单估算[23 ] ;植被光学厚度τ c τ s p τ l τ i p 3 部分光学厚度,如式(11),对于SMOS所称的低矮植被(Low Vegetation),其光学厚度τ s p L A I [25 ] ,如式(12),其中b ' s b ' ' s τ s _ n a d τ l τ i p [26 ,27 ,28 ,29 ] ,在此不做详述.针对以上参数,由于无法获得具体设置的数值,本文在模拟亮温时直接采用SMOS给出的建议值[30 ] ,如表1 所示. ...
A Model for Microwave Emission from Vegetation‐covered Fields
1
1982
... 其中:T g T c ω τ c T g T s o i l _ s u r f T s o i l _ d e p t h [24 ] ;对于植被温度,根据SMOS过境时刻(早、晚6:00)近地面温度、土壤温度、植被温度三者近似相等这一假设,可通过气温来进行简单估算[23 ] ;植被光学厚度τ c τ s p τ l τ i p 3 部分光学厚度,如式(11),对于SMOS所称的低矮植被(Low Vegetation),其光学厚度τ s p L A I [25 ] ,如式(12),其中b ' s b ' ' s τ s _ n a d τ l τ i p [26 ,27 ,28 ,29 ] ,在此不做详述.针对以上参数,由于无法获得具体设置的数值,本文在模拟亮温时直接采用SMOS给出的建议值[30 ] ,如表1 所示. ...
SMOSREX: A Long Term Field Campaign Experiment for Soil Moisture and Land Surface Processes Remote Sensing
1
2006
... 其中:T g T c ω τ c T g T s o i l _ s u r f T s o i l _ d e p t h [24 ] ;对于植被温度,根据SMOS过境时刻(早、晚6:00)近地面温度、土壤温度、植被温度三者近似相等这一假设,可通过气温来进行简单估算[23 ] ;植被光学厚度τ c τ s p τ l τ i p 3 部分光学厚度,如式(11),对于SMOS所称的低矮植被(Low Vegetation),其光学厚度τ s p L A I [25 ] ,如式(12),其中b ' s b ' ' s τ s _ n a d τ l τ i p [26 ,27 ,28 ,29 ] ,在此不做详述.针对以上参数,由于无法获得具体设置的数值,本文在模拟亮温时直接采用SMOS给出的建议值[30 ] ,如表1 所示. ...
Calibration of the L-MEB Model over A Coniferous and a Deciduous Forest
1
2008
... 其中:T g T c ω τ c T g T s o i l _ s u r f T s o i l _ d e p t h [24 ] ;对于植被温度,根据SMOS过境时刻(早、晚6:00)近地面温度、土壤温度、植被温度三者近似相等这一假设,可通过气温来进行简单估算[23 ] ;植被光学厚度τ c τ s p τ l τ i p 3 部分光学厚度,如式(11),对于SMOS所称的低矮植被(Low Vegetation),其光学厚度τ s p L A I [25 ] ,如式(12),其中b ' s b ' ' s τ s _ n a d τ l τ i p [26 ,27 ,28 ,29 ] ,在此不做详述.针对以上参数,由于无法获得具体设置的数值,本文在模拟亮温时直接采用SMOS给出的建议值[30 ] ,如表1 所示. ...
Estimates of Surface Soil Moisture Under Grass Covers Using L-band Radiometry
1
2007
... 其中:T g T c ω τ c T g T s o i l _ s u r f T s o i l _ d e p t h [24 ] ;对于植被温度,根据SMOS过境时刻(早、晚6:00)近地面温度、土壤温度、植被温度三者近似相等这一假设,可通过气温来进行简单估算[23 ] ;植被光学厚度τ c τ s p τ l τ i p 3 部分光学厚度,如式(11),对于SMOS所称的低矮植被(Low Vegetation),其光学厚度τ s p L A I [25 ] ,如式(12),其中b ' s b ' ' s τ s _ n a d τ l τ i p [26 ,27 ,28 ,29 ] ,在此不做详述.针对以上参数,由于无法获得具体设置的数值,本文在模拟亮温时直接采用SMOS给出的建议值[30 ] ,如表1 所示. ...
Estimation of Interception Capacity of the Forest Floor
1
1996
... 其中:T g T c ω τ c T g T s o i l _ s u r f T s o i l _ d e p t h [24 ] ;对于植被温度,根据SMOS过境时刻(早、晚6:00)近地面温度、土壤温度、植被温度三者近似相等这一假设,可通过气温来进行简单估算[23 ] ;植被光学厚度τ c τ s p τ l τ i p 3 部分光学厚度,如式(11),对于SMOS所称的低矮植被(Low Vegetation),其光学厚度τ s p L A I [25 ] ,如式(12),其中b ' s b ' ' s τ s _ n a d τ l τ i p [26 ,27 ,28 ,29 ] ,在此不做详述.针对以上参数,由于无法获得具体设置的数值,本文在模拟亮温时直接采用SMOS给出的建议值[30 ] ,如表1 所示. ...
Impact of Rain Interception by Vegetation and Mulch on the L-band Emission of Natural Grass
1
2006
... 其中:T g T c ω τ c T g T s o i l _ s u r f T s o i l _ d e p t h [24 ] ;对于植被温度,根据SMOS过境时刻(早、晚6:00)近地面温度、土壤温度、植被温度三者近似相等这一假设,可通过气温来进行简单估算[23 ] ;植被光学厚度τ c τ s p τ l τ i p 3 部分光学厚度,如式(11),对于SMOS所称的低矮植被(Low Vegetation),其光学厚度τ s p L A I [25 ] ,如式(12),其中b ' s b ' ' s τ s _ n a d τ l τ i p [26 ,27 ,28 ,29 ] ,在此不做详述.针对以上参数,由于无法获得具体设置的数值,本文在模拟亮温时直接采用SMOS给出的建议值[30 ] ,如表1 所示. ...
SMOS Level 2 Processor Soil Moisture Algorithm Theoretical basis Document (ATBD)
2
2017
... 其中:T g T c ω τ c T g T s o i l _ s u r f T s o i l _ d e p t h [24 ] ;对于植被温度,根据SMOS过境时刻(早、晚6:00)近地面温度、土壤温度、植被温度三者近似相等这一假设,可通过气温来进行简单估算[23 ] ;植被光学厚度τ c τ s p τ l τ i p 3 部分光学厚度,如式(11),对于SMOS所称的低矮植被(Low Vegetation),其光学厚度τ s p L A I [25 ] ,如式(12),其中b ' s b ' ' s τ s _ n a d τ l τ i p [26 ,27 ,28 ,29 ] ,在此不做详述.针对以上参数,由于无法获得具体设置的数值,本文在模拟亮温时直接采用SMOS给出的建议值[30 ] ,如表1 所示. ...
... SMOS决定反演是否完成的设置条件为步长小于0.005 m³/m³或迭代次数达到10次[30 ] .以上复杂的矩阵运算就在于获取不定步长使得代价函数快速收敛,而从迭代次数来看,对待求参数数值的调整主要是围绕先验值的少量局部搜索. ...
An Algorithm for Least-squares Estimation of Non Linear Parameters
1
1963
... SMOS采用Levenberg–Marquardt(L-M)迭代算法[31 ] 来求解土壤水分.首先,构建观测亮温T B i m e a s T B i s i m






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}