




1 引 言
人类活动极大地改变了地球系统结构,研究人类活动对于生态环境可持续发展具有重要意义[1]。目前人类活动变化监测方法主要有地面调查、统计方法以及遥感技术等[2-4]。随着新技术发展,如Google Earth Engine地理云计算、深度学习等使得人类活动信息提取朝着集成化、智能化方向发展。居民地、道路和工矿用地等信息提取是研究人类活动变化的基础。其中,居民地信息提取是遥感专题信息提取的难点之一。快速准确地识别居民地对于实现数字城市、城市规划管理、地震应急救援、灾害损失评估以及推进国家战略决策等领域具有重要现实意义。高分辨率遥感影像由于几何、形状、纹理等特征信息丰富[5-6],成为精细获取居民地信息的重要手段。但是与自然地物相比,居民地区域几何形状规整,城镇居民地内部包括建筑物、绿化和阴影等,地物间光谱差异大,而农村居民地面积小、分布零散,特征变异性增强,加大了自动提取方法的技术难度[7]。较之传统的基于像元分析方法,面向对象的分析方法已成为高分辨率遥感影像信息提取的重要方式之一[8-10],其处理单元是包含多种语义信息的对象,大大提高了影像信息的挖掘能力。
面向对象的分析方法关键在于影像分割尺度的确定和信息提取算法的选择。确定分割尺度的目的在于使得分割后对象的轮廓贴近地物的真实形态,最大程度的减弱过分割和欠分割现象。对于地物分布零散和复杂的影像,分割尺度成为一个难点。目前,很多学者对多尺度分割等算法进行了大量的研究[11-13],并提出了很多新的改进方法。Dragut等[14-15]开发了ESP(Estimation of Scale Parameter)、ESP2(Estimation of Scale Parameter 2)、OSPS(Optimum Scale parameter Selector)等方法用于确定最佳分割尺度。其中,ESP利用局部方差在影像中寻找多个尺度,但局限在于只考虑单个波段且没有考虑空间自相关[16];ESP2将影像分割成3个层次,且能找到3个最佳尺度,但是对高分辨率遥感影像中形态较小的地物很难进行分割[17]。OSPS根据层内方差和层间空间自相关确定影像的多个最优分割尺度,但存在过分割现象。针对上述问题,GuiGues等[18]提出的尺度集理论能够储存不同尺度的区域以及它们的分层关系,并对区域形成尺度索引,通过构建的尺度层次结构很好地解决了多尺度分割的需求。
信息提取的核心在于对目标对象的准确分类,提取算法决定着分类总体精度。针对不同数据源,很多学者开展了不同算法的对比研究。例如以多时相SAR数据[19]、高分辨率影像以及LiDAR数据等[20]为数据源, 支持向量机在提取建筑物信息时结果较好。以SPOT为数据源,贝叶斯分类器[21]和决策树[22]在不同研究区均取得较好结果。以Landsat 8为数据源进行的土地分类结果表明,支持向量机精度优于神经网络[23],而以SPOT6为数据源提取的建筑物结果认为神经网络精度优于支持向量机和最邻近方法[24]。每种算法对某一期特定数据源提取精度较高,但是算法普适性较差,当影像数据源、成像时间、训练样本、选取区域及属性特征存在差异时,不同方法提取精度也存在很大差异。因此,系统、科学地集成多种分类器形成算法集,通过对样本进行训练,从中选取最优算法,对于影像信息提取具有重要参考和实用意义。
本文以多源高分辨率遥感影像为数据源,开展了面向对象的青海湖环湖区居民地信息自动提取算法研究。首先,将整景影像分块,对各分块分别利用尺度集建立层次结构,通过检索拼接各分块建立整景影像多尺度层次构架,并自动选取最优分割尺度。然后,基于构建好的算法集对样本的自定义特征、光谱特征、几何特征和纹理特征进行训练,结合精度评定来选取最优算法。最后,利用最优算法提取城镇居民地和农村居民地信息。
2 研究区概况
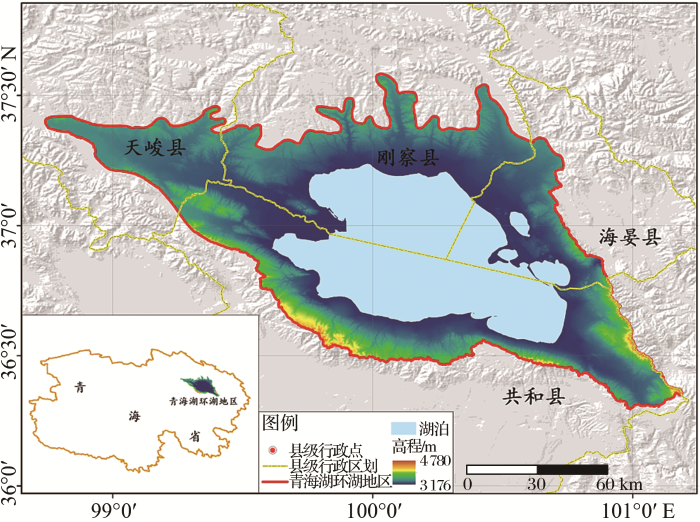
青海湖环湖区地处青海省东北部,地理坐标位于98.73°~101.21°E、36.28°~37.60°N,海拔3 176~4 780 m(图1),是西部柴达木盆地、东部湟水谷地、南部江河源头与北部祁连山地的枢纽地带。由于其独特的地理位置和环境特征,是我国典型的生态系统脆弱区,其生态环境质量很大程度上反映着青藏高原整体生态变化趋势。
图1
3 数据与方法
3.1 研究数据
数据源选取2017年5月到11月的高分1号、高分2号和资源3号卫星多光谱和全色影像数据,整个环湖区所用影像共21景,影像数据见表1,通过几何校正、正射校正、图像融合和图像增强等预处理,获取高分1号(空间分辨率为2 m)、高分2号(空间分辨率为1 m)和资源3号(空间分辨率为2.1 m)的融合影像,有蓝、绿、红和近红外4个波段。
表1 高分辨率遥感影像数据列表
Table 1
| 影像名称 | 成像时间 | 行列号 | 云量 |
|---|---|---|---|
| GF1_PMS1_E99.1_N37.2_20170813_L1A0002539236.tif | 20170813 | 93/29 | 4% |
| GF1_PMS1_E101.2_N36.4_20171005_L1A0002653985.tif | 20171005 | 95/25 | 4% |
| GF1_PMS2_E100.3_N37.7_20170527_L1A0002384098.tif | 20170527 | 92/27 | 11% |
| GF2_PMS1_E100.5_N37.2_20171013_L1A0002678101.tif | 20171013 | 146/42 | 5% |
| GF2_PMS1_E100.5_N37.4_20171013_L1A0002678097.tif | 20171013 | 145/42 | 1% |
| GF2_PMS1_E100.6_N37.6_20171013_L1A0002678096.tif | 20171013 | 145/42 | 3% |
| GF2_PMS2_E100.3_N37.4_20170810_L1A0002534662.tif | 20170810 | 145/43 | 4% |
| GF2_PMS2_E100.5_N36.7_20170805_L1A0002526723.tif | 20170805 | 147/42 | 9% |
| GF2_PMS2_E100.7_N37.2_20171013_L1A0002672923.tif | 20171013 | 146/41 | 7% |
| GF2_PMS2_E100.7_N37.4_20171013_L1A0002672921.tif | 20171013 | 145/41 | 12% |
| ZY3_TLC_E99.8_N36.6_20171011_L1A0003817439.tif | 20171011 | 133/41 | 0% |
| ZY3_TLC_E99.9_N37.0_20171011_L1A0003817438.tif | 20171011 | 132/41 | 0% |
| ZY3_TLC_E100.0_N37.4_20171011_L1A0003817437.tif | 20171011 | 131/41 | 0% |
| ZY3_TLC_E100.1_N36.6_20170625_L1A0003746917.tif | 20170625 | 133/40 | 18% |
| ZY3_TLC_E100.8_N36.6_20170710_L1A0003748580.tif | 20170710 | 133/38 | 1% |
| ZY3_TLC_E100.9_N37.0_20170710_L1A0003748579.tif | 20170710 | 132/38 | 3% |
| ZY302_PMS_E98.8_N37.4_20170707_L1A0000156704.tif | 20170707 | 131/44 | 7% |
| ZY302_PMS_E100.4_N37.0_20171127_L1A0000217243.tif | 20171127 | 132/39 | 0% |
| ZY302_TMS_E99.5_N37.0_20170717_L1A0000160059.tif | 20170717 | 132/41 | 0% |
| ZY302_TMS_E100.3_N36.6_20171127_L1A0000217279.tif | 20171127 | 133/39 | 0% |
| ZY302_TMS_E100.4_N37.0_20170529_L1A0000139947.tif | 20170529 | 132/39 | 8% |
3.2 研究方法
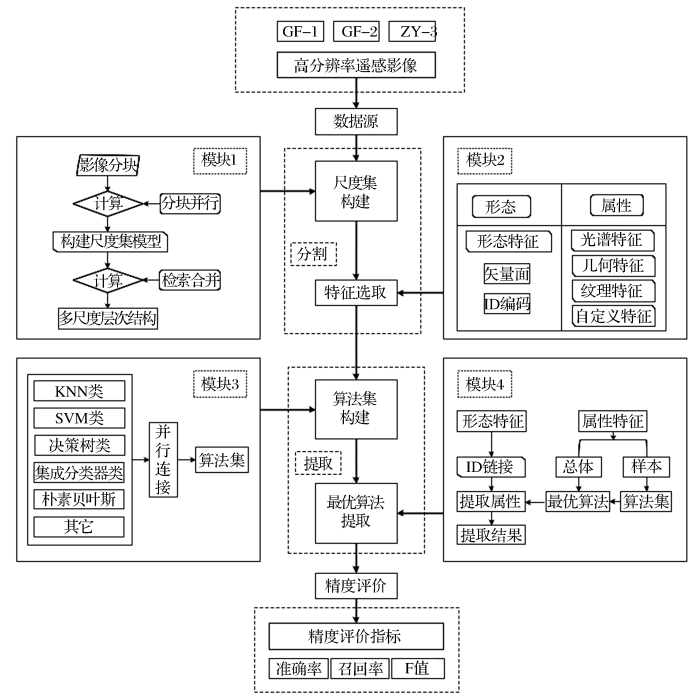
利用尺度集理论对遥感影像进行多尺度分割,获取分割对象的形态和属性特征,通过建立的机器学习算法集对样本的自定义特征、光谱特征、几何特征和纹理特征进行训练,通过综合精度评定选取最优算法,最后利用最优算法提取居民地信息。技术流程见图2。
图2
3.2.1 构建尺度集理论
采用层次区域合并方法构建尺度集理论,即通过尺度索引形成二叉树。多层次多尺度构架完整描述了区域层次关系及分割过程,尺度集理论描述如下。
假定
3.2.2 特征选取
对每个分割对象计算其特征值,作为信息提取的输入参数(表2)。其中光谱特征包括:波段均值、标准差、最大差异和亮度等;几何特征包括:面积、长度、密度、形状指数、长宽比、紧致度、主要方向、椭圆拟合和矩形拟合等;纹理特征主要计算灰度共生矩阵(Gray-level co-occurrence matrix,GLCM),和灰度级差矢量(Gray level difference vector, GLDV),其中,GLCM主要包括同质性、反差、差异性、熵和相关性等,GLDV主要包括熵值、均值和反差等;自定义特征包括:归一化植被指数、土壤调节植被指数、归一化水体指数和植被覆盖度等。
表2 输出特征
Table 2
| 一级特征 | 二级特征 |
|---|---|
| 光谱特征 | 亮度、均值(1,2,3,4)、最大差异、标准差(1,2,3,4) |
| 几何特征 | 面积、长度、长宽比、非对称性、 紧致性、密度、椭圆拟合、主要方向、 形状指数、矩形拟合 |
| 纹理特征 | GLCM 同质性、GLCM 反差、GLCM 差异性、GLCM熵、 GLCM 均值、GLCM 相关性、GLDV 熵、 GLDV均值、 DLDV 反差、GLDV 相关性、GLDV 同质性、 GLDV 差异性 |
| 自定义特征 | 归一化植被指数、归一化水体指数、 土壤调节植被指数、植被覆盖度 |
3.2.3 机器学习分类算法
(1) 支持向量机(SVM)
其中:
(2) K邻近算法(KNN)
K邻近算法(K-nearest neighbor, KNN)是非参数分类方法,输入参数为特征空间的训练样本,输出参数为类别关系,常用的KNN有1NN、余弦最邻近、三次最邻近和加权最邻近等。其中,加权最邻近KNN,假设对于样本
其中:
最后判断
(3) 集成分类器
分类回归树(Classification And Regression Tree, CART)是基于基尼系数的决策树[31],通过度量给定数据的不纯度构建二叉树,计算每个属性的基尼系数,将基尼系数最低的作为分裂属性。基尼系数计算公式为:
其中:
集成分类器是将几个单独的分类器加权,组合形式优于单个分类器分类结果,有装袋算法、提升树算法和子空间判别集等。
装袋算法(Bagging)是结合引导和聚合的方法,如果参数引导估计比原参数更准确,就可以实现更好的分类。训练集
其中:
提升树算法(Boosting Tree)是通过权重
来变换权重,最终输出分类器,其表达式为:
其中:
3.2.4 最优算法选取
最优算法选取是将构建的算法集通过样本属性的光谱、几何、纹理以及自定义特征进行训练学习,然后进行综合精度评定,自动选取最优算法,具体过程如下:
(1)将KNN类、SVM类、决策树类、集成分类器、朴素贝叶斯等23种算法以并行运算的方式形成算法集
(2)将样本特征
(3)K-1份子样本开始训练算法集,用独立的一份样本对算法集中每种算法进行综合精度评价。自动选取最佳算法
其中:
4 结果和分析
4.1 建立多层次多尺度构架
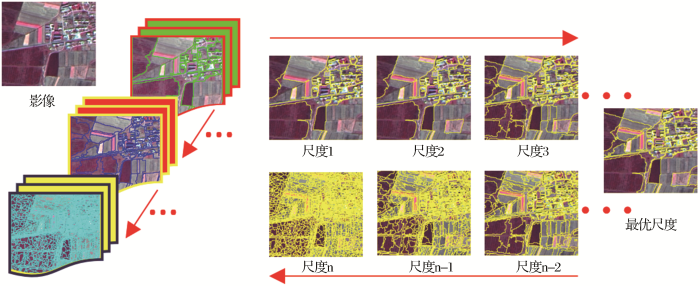
通过对影像进行分块,各分块分别建立多尺度层次结构。初始层次是粗尺度分割的对象,然后在初始分割对象的基础上进行较细尺度的分割,得到第二层次的分割对象,依次类推,下一层次是在上一层次分割对象的基础上进行的更精细尺度的分割,直到最细尺度分割完成,同时计算并记录每个层次节点的尺度参数作为演化过程的索引,最终建立尺度集。以GF-1影像为例(图3),可以看到在尺度1情景下,图像右上角居民地分割较粗,在尺度3情景下分割相对精细,依次分割,在尺度n情景下分割成为更精细的若干对象,即建立起了每个区域的层次关系和尺度索引,形成若干个从粗到细的尺度构架,最后从若干尺度中选取最优分割尺度结果,使得分割后对象的轮廓贴近地物的真实形态,很大程度上减弱了大地物小尺度的过分割和小地物大尺度的欠分割现象。
图3
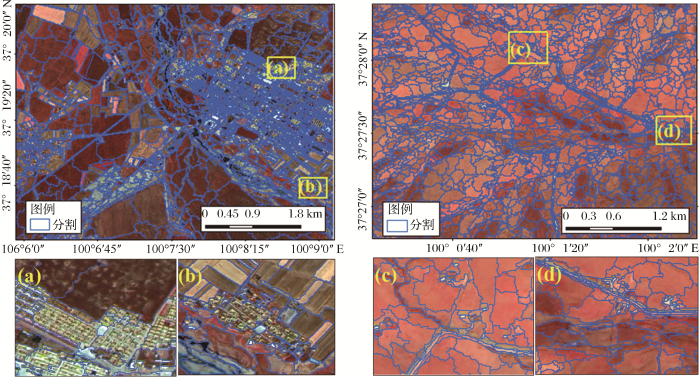
以GF-2影像为例,图4(a)是基于ESP选取的最佳分割结果,该方法考虑了局部方差,能勾勒居民地轮廓信息,但是为了表达小面积居民地信息,需要选取的最佳尺度参数较小,导致其他地物分割太破碎,增大了分割后对象的数量。图4(b)是基于ESP2选取的第三层次的分割结果。第一层是对较大目标地物进行分割,以此类推,第三层次在前面较大目标地物的基础上形成小目标地物。可以看到,相比于图4(a)、4(b)最后分割结果并不会太破碎,同时能将部分小面积居民地轮廓勾勒出来,但是4(b)红色标注处居民地信息并没有很好地表达出来。也就是说,该方法能建立3个层次,并形成多尺度分割,但是在表达小地物时存在局限。图4(c)是从尺度集多层次多尺度构架中选取的最优尺度,可以看到小面积居民地分割效果较好。
图4

图4
分割结果对比分析(GF-2影像)
(a)多尺度分割(ESP) (b)多层次多尺度分割(ESP2) (c)尺度集最优尺度
Fig.4
Comparative analysis of segmentation results
4.2 基于尺度集理论的居民地多尺度分割
首先对整景影像进行分块,基于并行计算建立各分块尺度层次结构,并通过检索拼接形成整景影像多尺度多层次分割并自动获取最优分割尺度。参数设置为:K=5(控制区域大小),Smin =10(后处理参数,用于消除小区域),wcolor=0.3(颜色权重),wcompact =0.6(紧致度权重)。为了清晰地显示最优尺度分割结果,城镇居民地和农村居民地分别选择4 317像素×3 235像素的ZY-3遥感影像、2 313像素×1 771像素的GF-2遥感影像进行说明(图5)。多尺度多层次构架中城镇、农村居民地最佳尺度分别为83.70、86.47,对局部分割尺度进行放大分别如图5(a)~图5(d)。通过分割结果可以看到城镇居民地轮廓逼近较好,精度较高;图5(a)对于片状的城镇居民地表示较好,能很好地区分居民地和非居民地信息,图5(b)居民地没有图5(a)规整,但是能从背景信息中很好地区分出居民地轮廓,分割形态完整。青海湖环湖地区大部分农村居民地占地面积小且分布零散,可以看到分割结果能很好地将农村居民地轮廓勾勒出来(图5(c)和5(d)),同时其他非居民地信息不会被分割过细,也就是说具有很好的小地物对象构建能力。总之,利用尺度集理论构建的多层次多尺度构架能够精细表达地物轮廓,根据地物形态特征形成最佳的分割尺度,大目标地物对应大分割尺度,小目标地物对应小分割尺度,地物分割结果较为完整,形态接近地物真实轮廓。
图5
4.3 青海湖环湖区居民地信息提取及精度评价
4.3.1 城镇、农村居民地信息提取
选取影像1(ZY-3影像)、影像2(ZY-3影像)和影像3(GF-2影像)分别代表集中分布的城镇居民地、片状分布的乡镇居民地和零散分布的农村居民地。利用最优尺度分割对象的自定义特征、光谱特征、几何特征和纹理特征对机器学习算法集进行训练,将样本平均分成k份,随机选取k-1份进行训练,独立的一份进行验证。影像1、影像2和影像3训练最优算法依次为三次SVM、子空间判别集和二次SVM,训练精度依次为98.2%、98.9%和97.5%。然后利用各自选取的最优算法提取居民地信息。本文将最优算法提取结果和多尺度分割结合决策树分类结果以及人工目视解译结果进行对比分析(图6)。通过对比分析得出:集中分布的城镇居民地中,多尺度分割结合决策树方法将大量非居民地信息提取到居民地中,区分效果不是很好,本文方法自动提取轮廓和人工解译结果吻合较好,但是由于道路和城镇居民地纹理等特征相似,导致部分道路错分为居民地。片状分布的乡镇居民地中多尺度分割结合决策树方法容易将河边滩地提取到居民地中,且提取的乡镇居民地轮廓偏大,本文自动提取总体轮廓与人工解译结果高度吻合,能将道路信息从中区分出来。零散分布的农村居民地中,多尺度分割结合决策树方法漏提较多,同时,将少量道路和裸地也提取到居民地中,而本文方法提取效果较好,漏提较少,但是也存在少量误提现象,因为小面积居民地和其他纹理相似的地物容易混淆。同时周边部分地物信息容易分割到小面积居民地中,原因在于很多蒙古包占地面积太小,结果略微夸大。通过不同算法交叉对比,本文方法在提取城镇居民地和农村居民地时能很好地反映边缘轮廓,自动提取精度较高。
图6
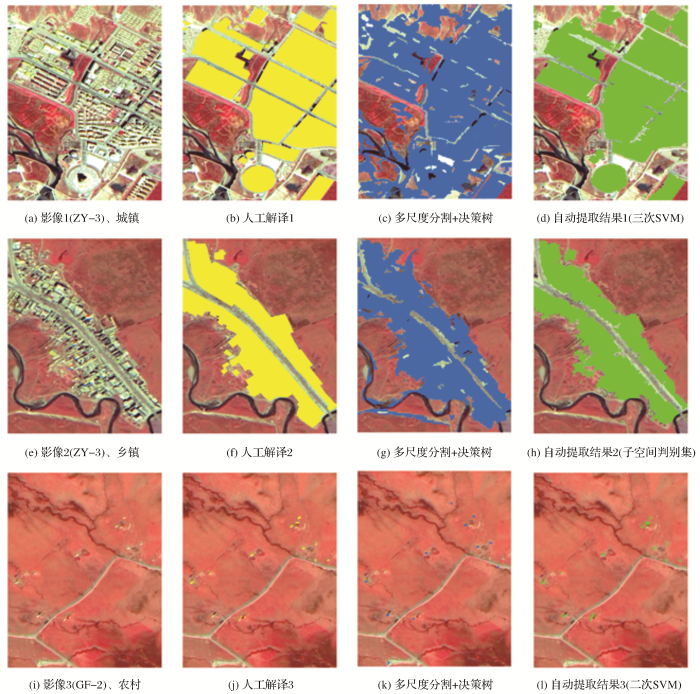
图6
人工解译及提取结果细部
Fig. 6
Local results of manually interpretation and extracting by algorithms
4.3.2 精度评价
采用召回率、准确率以及F值作为精度评价指标,评价青海湖环湖区居民地信息提取精度[35]。指标计算如下:
其中:R为召回率,P为准确率,F为F值,TP为正确划分为居民地的像元数,FP为错误判断为居民地的像元数,FN为错误判为非居民地的像元数。
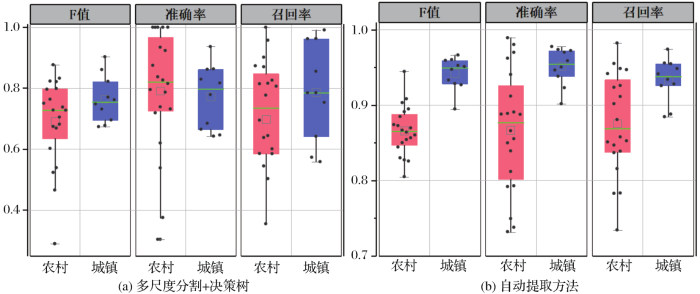
选取了10处城镇居民地和20处农村居民地,分别计算了多尺度结合决策树和本文自动提取方法的召回率、准确率以及F值(图7)。对比各精度评价指标可以看到,本文方法明显优于多尺度结合决策树方法。多尺度结合决策树方法城镇居民地平均召回率、平均准确率和平均F值分别为78.66%、77.23%和76.43%。农村居民地平均召回率、平均准确率和平均F值分别为69.78%、79.08%和68.99%。方法城镇居民地平均召回率、平均准确率和平均F值分别为93.36%、95.14%和94.22%。最大和最小召回率为97.43%和88.44%,最大和最小准确率为97.79%和90.17%,最大和最小F值为96.66%和89.48%。农村居民地平均召回率、平均准确率和平均F值分别为87.58%、86.66%和86.62%。最大和最小召回率为98.26%和73.38%,最大和最小准确率为98.95%和73.14%,最大和最小F值为94.46%和80.47%。通过召回率、准确率和F值3个评价指标总体精度来看,该方法在城镇居民地和农村居民地自动化提取精度较高。
图7
4.4 环湖区居民地提取结果
通过上述分析可以看到本文方法相比于多尺度结合决策树方法精度较高,且和人工目视解译结果吻合较好。因此,基于自动提取方法提取了整个环湖区居民地信息。通过对青海湖环湖区城镇和农村居民地提取结果进行统计分析得出,青海湖北部居民地分布多且较为分散,东部及金沙滩乡和三角城镇居民地相对少于其他地区。其中,城镇居民地主要集中分布在刚察县和天峻县县城,面积为7.34 km2;农村居民地主要集中分布在青海湖北部及南部道路两侧,面积为24.86 km2(图8(a))。
图8
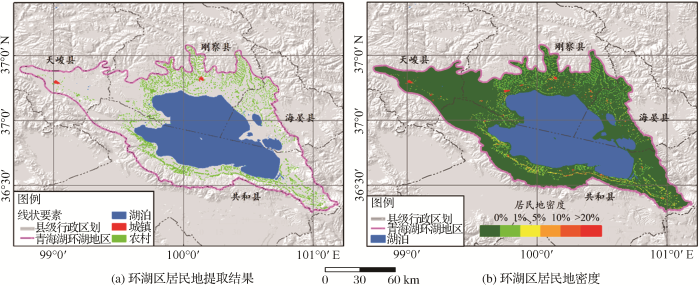
图8
环湖区居民地提取结果
Fig. 8
The extraction results of the residential areas around the lake
为了进一步说明环湖区居民地空间分布特征,通过建立青海湖环湖区300 m×300 m的方格网,计算居民地在方格网所占比例,然后划分为0~1%、1%~5%、5%~10%、10%~20%、>20%5个等级,形成居民地密度分布图,如图8(b)所示,可以看到大于20%的区域主要是刚察县、天峻县县城、倒淌河镇和黑马河镇等各乡镇。环湖区南部沿道路居民地密度在1%~10%之间,明显高于环湖区北部。综上,环湖区南部人类活动强度高于北部,沿道路两侧人类活动强度高于山区地方,县城、乡镇人类活动强度高于其他地区。
5 结 语
基于多源高分辨率卫星遥感影像数据,本文提出了面向对象的青海湖环湖区居民地信息自动化提取方法,提取了环湖区居民地空间分布信息,主要结论如下:
(1)本文建立的尺度集理论可以获取影像不同尺度下的分割结果,选取的最优分割尺度能很好地逼近居民地边缘轮廓。
(2)构建的算法集针对不同影像,能选取最优算法提取城镇和农村居民地。运用大量的纹理等特征,以分割对象为基本单元,充分考虑纹理多尺度和多方向性,其自动化提取结果与人工解译结果高度吻合。
(3)通过平均召回率、平均准确率和平均F值指标对自动提取结果进行评价,城镇居民地均在93%以上,农村居民地均在86%以上,表明该方法能很好地提取居民地信息,城镇居民地提取精度高于农村居民地。但是,对于植被稀疏地区以及纹理等特征相似的小面积居民地区域存在误提现象,下一步工作将对目标比较小的居民地提取算法进行优化,融合多源信息来提高小面积居民地自动化提取精度。
参考文献
The Ecosystem Services Agenda: Bridging the Worlds of Natural Science and Economics, Conservation and Development, and Public and Private Policy
[J].
Investigation on Human Activities Condition in Wetlands of the Zhang Jiang River Estuary, Fujian Province
[J].
福建漳江口湿地人类活动状况调查
[J].
Analysis of Roles of Human Activities in Land Desertification in Arid Area of Northwest China
[J].
西北干旱区土地荒漠化中人类活动作用及其指标选择
[J].
Detection of Olive Oil Mill Waste (OOMW) Disposal Areas Using High Resolution GeoEye's OrbView-3 and Google Earth Images
[J].
An Application of Tree Species Classification Using High-resolution Remote Sensing Image based on the Rough Set Theory
[J].
Remote Sensing Image Classification based on Log-Gabor Wavelet and Krawtchouk Moments
[J].
基于Log-Gabor小波和Krawtchouk矩的遥感图像分类
[J].
Supervised Dense Rural Residential Extraction from High-resolution Remote Sensing Images based on Automatically Augmentation of Training Samples
[J].
基于样本自动扩充的街区式农村居民地遥感提取方法
[J].
Comparing Machine Learning Classifiers for Object-based Land Cover Classification Using Very High Resolution Imagery
[J].
A Segmentation and Classification Approach of IKONOS-2 Imagery for Land Cover Mapping to Assist Flood Risk and Flood Damage Assessment
[J].
Object based Image Analysis for Remote Sensing
[J].
A Multi-Scale Segmentation/Object Relationship Modelling Methodology for Landscape Analysis
[J].
The Potentials of Sentinel-2 and LandSat-8 Data in Green Infrastructure Extraction, Using Object based Image Analysis (OBIA) Method
[J].
An Unsupervised Multi-Scale Segmentation Method based on Automated Parameterization
[J].
ESP: A Tool to Estimate Scale Parameter for Multiresolution Image Segmentation of Remotely Sensed Data
[J].
Automated Parameterisation for Multi-scale Image Segmentation on Multiple Layers
[J].
Semiautomatic Object Oriented Landslide Recognition Scheme from Multisensor Optical Imagery and DEM
[J].
A Tool Assessing Optimal Multi-Scale Image Segmentation
[J].
Scale-Sets Image Analysis
[J].
Multi-temporal Radarsat-2 Polarimetric SAR Data for Urban Land-cover Classification Using an Object-based Support Vector Machine and a Rule-based Approach
[J].
Automatic Building Extraction from very High-resolution Image and LiDAR Data with SVM Algorithm
[J].
Residential Areas Detection on Panchromatic Remote Sensing Images based on Naive Bayesian Networks
[J].
遥感影像居民地目标Bayesian网络识别方法研究
[J].
The Decision Tree Algorithm of Automatically Extracting Residential Information from SPOT Images
[J].
SPOT卫星影像居民地信息自动提取的决策树方法研究
[J].
Land Cover Classification Analysis of Volcanic Island in Aleutian Arc Using An Artificial Neural Network (ANN) and A Support Vector Machine (SVM) from Landsat Imagery
[J].
Research on Building Extraction Rules based on SPOT6 Data
[J].
基于SPOT6数据的建筑物提取规则研究
[J].
A Region-growing Segmentation Algorithm for GPUs
[J].
Speed Up Improvement of Parallel Image Layers Generation Constructed by Edge Detection Using Message Passing Interface
[J].
A Bilevel Scale-sets Model for Hierarchical Representation of Large Remote Sensing Images
[J].
Toward an Optimal SVM Classification System for Hyperspectral Remote Sensing Images
[J].
Remote Sensing Image Classification based on the Optimal Support Vector Machine and Modified Binary Coded Ant Colony Optimization Algorithm
[J].
Hyperspectral Image Classification via a Joint Weighted K-Nearest Neighbour Approach
[C]∥ Asian Conference on Computer Vision,Cham.
Cart-based Land Use/Cover Classification of Remote Sensing Images
[J].
基于分类回归树分析的遥感影像土地利用/覆被分类研究
[J].
Adabag: An R Package for Classification with Boosting and Bagging
[J].
Ensemble based Systems in Decision Making
[J].
An Edge-suppressed Points Voting Method for Extracting Rural Residential Areas from High Spatial Resolution Images
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}