




1 引言
目前,利用遥感技术监测湖泊主要集中在湖泊的面积[3-4]、水位[5-6]、水量[7]、水质[8]等方面。常见的水体提取方法有单波段阈值法[9]、谱间关系法[10]、水体指数法[11],还有对水体的光谱、形态、水文学及空间分布等多种特征进行综合分析的决策树法[12]和基于决策树的面向对象的分析方法[13]等。其中,水体指数法是一种快速、简便、高效的水体识别方法。1996年,Mcfeeters[11]提出了归一化差异水体指数(Normalized Difference Water Index,NDWI),利用近红外和绿光波段增强了影像中的水体特征,同时消除了土壤和陆地植被特征,可用于水体的快速提取;随后,在NDWI的基础上,徐涵秋[14]提出了改进的归一化差异水体指数(Modified Normalized Difference Water Index,MNDWI),采用中红外波段代替近红外波段,取得了比NDWI更好的提取效果,尤其是在识别混合有建筑物或植被的水体特征时[15]。使用水体指数法时,阈值选取一直是个难题,阈值过小会将非水体区域误识别为水体,阈值过大则会遗漏部分水体。骆剑承等[16]提出了利用NDWI的“全局—局部”转换的迭代信息提取方法,实现了局部范围最佳阈值的确定。李均力等[17]在此方法的基础上,引入数字高程模型生成坡度信息,降低了山体阴影的干扰,建立了适合于高山地区冰川湖泊的提取算法。
在利用光学遥感影像监测湖泊面积时,往往由于云及云阴影等的遮挡,无法提取得到完整的湖泊边界。尤其是在青藏高原,常常分布有大量的云,以2018年为例,全年覆盖青藏高原地区的Landsat-8地表反射率Tier1数据共有3 165景,其中云量在0~10%的影像共有1 002景,仅占全年总景数的31.7%,即2018年全年中青藏高原地区至少有三分之二的影像云量>10%。通过统计云量<10%的影像数量在各月份中占该月总景数的百分比,发现1~4月、10~12月的影像中约有33%~53%的影像云量<10%,而5~9月的影像中约有9%~21%的影像云量<10%。在提取湖泊时,为了避免冰和雪的影响,常常需要选择融化时期的影像,而青藏高原地区湖泊的融化时期大约在5~10月。因此,在利用湖泊融化时期的影像提取湖泊时,大部分影像都或多或少受云的影响。目前主要有3种常用去云方法:①同态滤波法:该方法可去除部分薄云[22],然而对于较厚的云层几乎无效;②多源数据融合法:使用不同时相或不同传感器的遥感影像,用无云部分替换另一影像中被云遮挡的部分[23],或利用SAR影像不受云的影响,基于小波变换与光学影像融合[24],得到去云影像。该方法可以去除厚云的影响,但是可能会受限于找不到合适的无云影像或者SAR图像;③时间序列傅立叶分析法[25-26],该方法可以将时间序列遥感数据进行简化和压缩,对时间序列遥感影像中的云及无效信息进行检测、去除和替代处理,但该方法目前主要适用于NDVI的去云处理。
所以为了利用现有的光学遥感影像、克服数据源有限的影响,结合湖泊边界位于同一高度的特点,提出了一种利用已知部分湖泊边界结合DEM数据生成完整湖泊边界的自动算法。
2 研究区及数据源
青藏高原那曲地区湖泊数量多,且分布密集,选择5个相邻的湖泊:达如错、切里错、懂错、江错、蓬错所在的区域作为研究区(如图1所示),用于测试该算法在一定区域内,对多个湖泊的自动化提取效果,并进行精度验证。这些湖泊面积在10~140 km2之间,且研究区内海拔范围为4 520~5 822 m。
图1
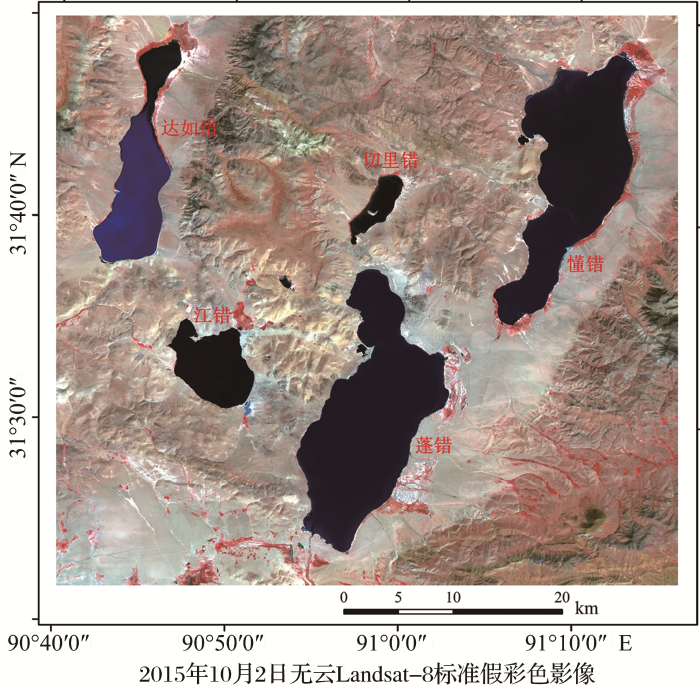
研究区使用的光学遥感数据为来源于美国地质调查局(USGS)的一景无云2015年10月2日的、一景有云2015年9月16日的Landsat-8地表反射率Tier1数据,和一景有云1989年9月24日的、一景无云1989年10月26日的Landsat-5地表反射率Tier1数据,水平分辨率均为30 m。还使用了两景来源于中国资源卫星应用中心的资源三号(ZY-3)2015年9月28日的无云数据,使用多光谱与全色波段的融合影像,其水平分辨率为2.1 m。DEM数据为来源于USGS的SRTM 30 m DEM[27],具体信息见表1。在使用DEM数据之前,需先将其投影转换为对应的Landsat影像所处的投影坐标系。Landsat影像和DEM数据主要用于湖泊边界的提取,ZY-3影像数据用于手工数字化得到精确的湖泊边界,用来检验Canny边缘检测算法的效果,以及检验自动提取的最终完整湖泊边界的精度。
表1 数据源信息
Table1
| 数据种类 | 数据来源 | 空间分辨率 | 时间 | 是否有云 |
|---|---|---|---|---|
| 光学遥感数据 | Landsat-8 | 30 m | 2015年9月16日 | 有云 |
| 2015年10月2日 | 无云 | |||
| ZY-3 | 2.1 m | 2015年9月28日 | 无云 | |
| Landsat-5 | 30 m | 1989年9月24日 | 有云 | |
| 1989年10月26日 | 无云 | |||
| DEM数据 | SRTM 30 m DEM | 30 m | 2000年2月 | 不受云的影响 |
3 湖泊边界自动提取算法
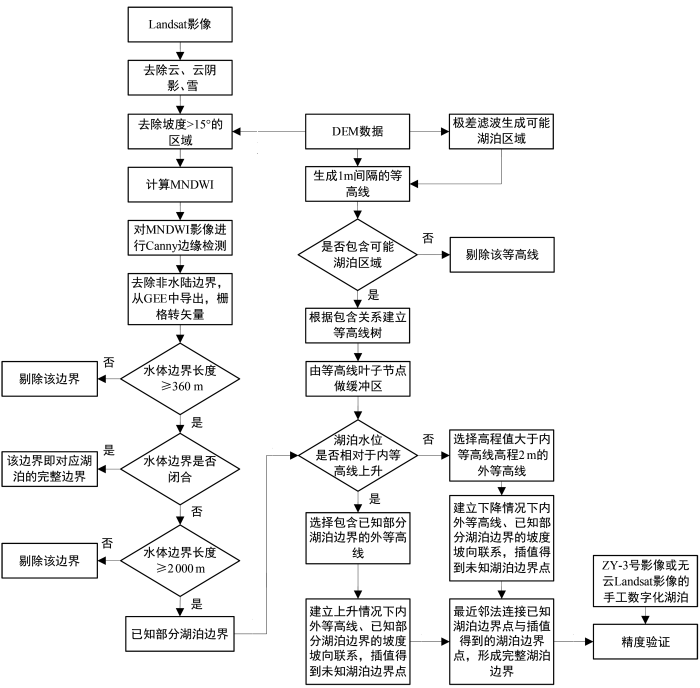
该算法主要包含3个步骤:①无遮蔽地区的湖泊边界提取,记为已知部分湖泊边界L;②可能湖泊区域及其等高线树的确定;③等高线叶子节点联合已知部分湖泊边界L,插值生成完整湖泊边界。总体技术流程图如图2所示。
图2
3.1 无遮蔽地区的湖泊边界提取
3.1.1 去除云、云阴影、雪和山体区域
Landsat-5和Landsat-8地表反射率Tier1影像均包含pixel_qa属性,该属性以位掩码的形式记录了由CFMASK算法[28]生成的像元质量评估情况。其中,pixel_qa属性的第3、4、5位分别代表云阴影、雪、云,值为1时代表存在云阴影、雪或云;第6~7位代表云的置信度,值为0代表置信度为0,值为1代表低置信度,值为2代表中等置信度,值为3代表高置信度,置信度越高说明对云的估计结果越可靠。利用像元位值即可对云、云阴影以及积雪覆盖的区域进行掩膜处理,本研究在建立云掩膜时选择了有云且高置信度的区域。此外,由于一些山体区域可能会被误识别为水体,所以对研究区内的DEM数据进行坡度计算,并认为坡度>15°的区域为山体,予以掩膜去除。
3.1.2 计算改进的归一化差异水体指数
通过计算改进的归一化差异水体指数MNDWI,可增大水体与非水体的区别。其公式为:
其中:Green为绿光波段,对应Landsat-5的波段2和Landsat-8的波段3;MIR为中红外波段,对应Landsat-5的波段5和Landsat 8的波段6。
3.1.3 Canny边缘检测算法
对MNDWI影像进行Canny边缘检测即可得到较为准确的水体边界,其中被掩膜区域的边界也会被识别为水体边界,需要将其去除。接下来,判断水体边界的长度,若<360 m,则删除该边界;若≥360 m,保留其中的闭合边界,意味着保留湖泊面积至少为0.008 1 km2的湖泊边界;对长度≥360 m的不闭合边界,其中可能有部分河流和小水体的边界,以及误识别的湖泊内部水体边界,因其长度普遍较短,所以通过排除长度<2 000 m的不闭合边界,将这些干扰性的水体边界排除掉。本算法后续将使用长度≥2 000 m的不闭合水体边界。
3.1.4 边缘检测效果
图3
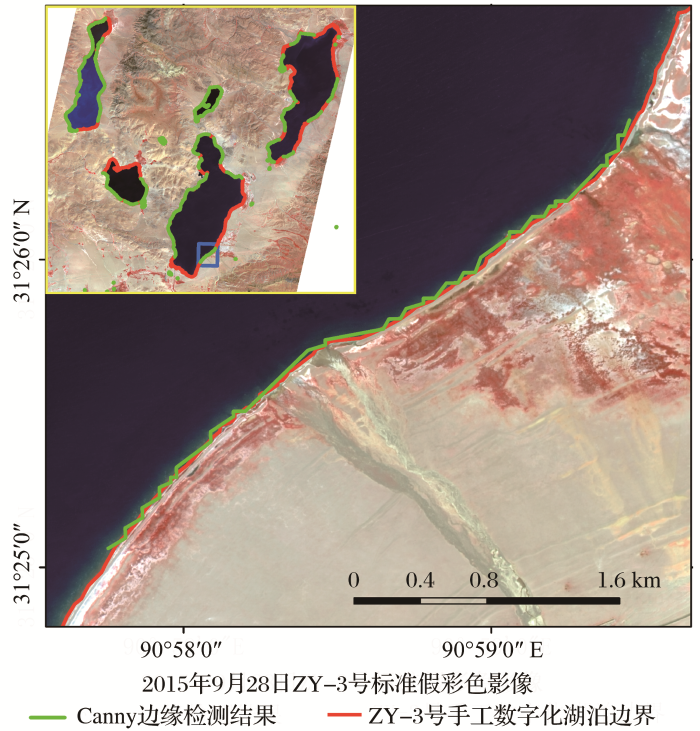
同时发现,即使是晴朗无云的影像,利用Canny算子进行水体边界检测时,由于湖泊边缘存在部分积雪,也导致了部分边界缺失和不连续,仍需要插值生成缺失的部分湖泊边界,并采用一定的连接算法才能获得完整湖泊边界。
3.2 可能湖泊区域及其等高线树的确定
3.2.1 可能湖泊区域的确定
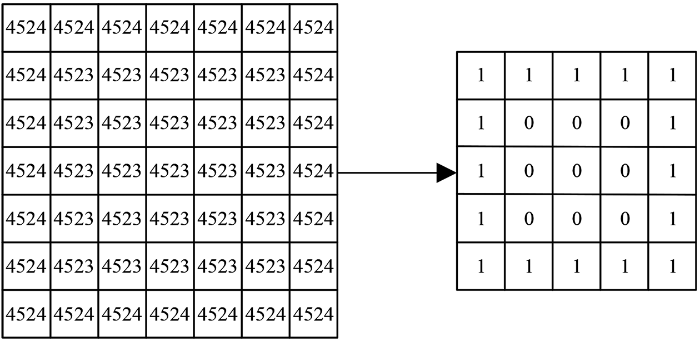
为了得到包围湖泊区域的等高线,用于湖泊边界插值,需要先确定可能的湖泊区域。由于SRTM 30 m DEM数据进行了空值填补处理,湖泊内部高程值一致,因此认为具有一定数目的、相同值的连通像元即为可能湖泊区域。
首先需要对DEM数据进行3×3像元的极差滤波处理,值为0的像元即代表以该像元为中心的3×3个像元值均相同;极差滤波后,选择值为0且连通像元个数≥9的区域,即代表至少有25个DEM连通像元值相同,将这些像元区域转化为矢量文件,获得可能湖泊区域,其相对于实际湖泊区域向内缩小一个像元,可以被周边等高线所包围(图4)。
图4
3.2.2 等高线树的建立
由于湖泊水位多年来变化可能不大,所以为了生成更加精细的等高线,同时避免等高线过于紧凑,首先对DEM数据进行重采样,生成10 m水平间隔的DEM,进而生成1 m等高距的等高线。考虑到湖泊周围都有包围着它的闭合等高线,因此剔除不闭合等高线。然后,判断等高线是否包含可能湖泊区域中的任一面要素,如不包含,则自动剔除。剩余等高线均为包含可能湖泊区域的有效等高线,每一条等高线至少包含一个可能湖泊区域。
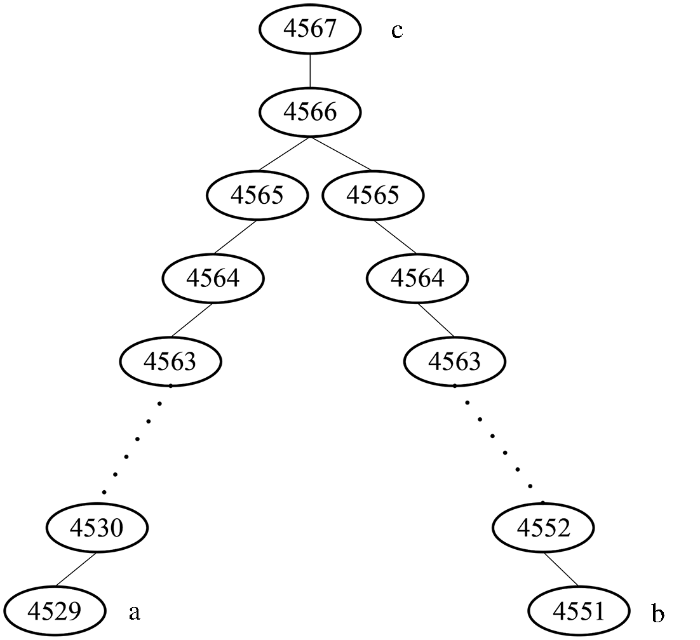
包围同一个湖泊区域的一系列等高线互为包含关系。对于同一个湖泊,最内部等高线代表该等高线内湖泊高程值均相同,等高线越往外其高程值越大,即湖泊处于洼地的状态,也反映了湖泊周围的地势情况,等高线的形状则反映了湖泊扩张或萎缩的大致轮廓。根据包含关系,对有效等高线建立树结构,最内部等高线为叶子节点,记为C1;包含该等高线的最邻近外等高线为该等高线的父节点;以此类推,建立包含该可能湖泊区域的等高线树结构。研究区内有多个可能湖泊区域,树的任一叶子节点即为某个湖泊区域对应的最内部等高线,通过逐层寻找父节点,可找到最顶层的根节点,即包含该湖泊区域的最外部等高线;当多个湖泊区域对应同一根节点时,将建立一个等高线树;当多个湖泊区域对应不同根节点时,将建立多个等高线树。通过建立等高线树,可以方便地找到任一等高线的外等高线,便于后续插值时查找和确定合适的外等高线,记为C2。
图5
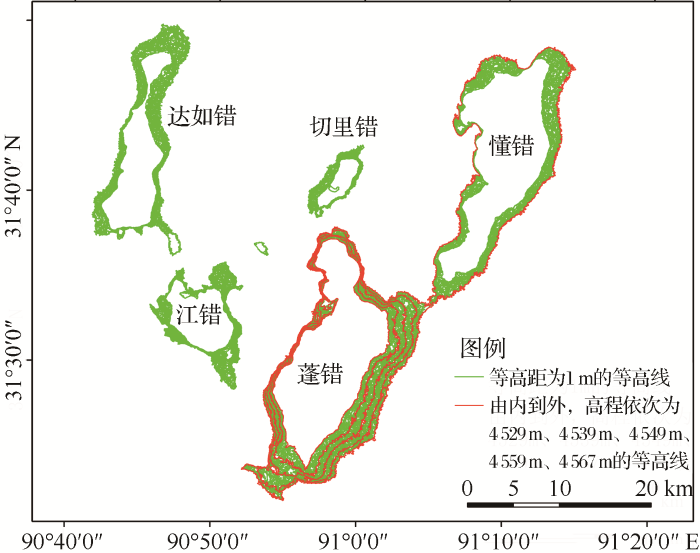
图6
3.3 完整湖泊边界的插值生成
通过无遮蔽地区的湖泊边界提取,可得到若干条长度≥2 000 m的不闭合水体边界;对于一个湖泊而言,其对应的等高线叶子节点C1附近的不闭合水体边界即可认为是该湖泊的已知部分湖泊边界,记为L,同时排除了一些较长的河流边界。
由于Landsat和DEM的获取时间不同,随着湖泊扩张或萎缩,湖泊水位相对于内等高线会上升或下降,即由Landsat提取的已知部分湖泊边界可能在内等高线外部或内部。为了自动判断区分这两种情况,对每个等高线叶子节点C1做缓冲距离为自身周长5%的缓冲区,比较内外缓冲区内包含的湖泊边界线长度,若外缓冲区内的边界长度>内缓冲区内的边界长度,则认为湖泊水位相对于内等高线上升;若外缓冲区内的边界长度≤内缓冲区内的边界长度,则认为湖泊水位相对于内等高线下降。针对两种情况,采用不同方法,从等高线树中选取合适的外等高线C2,建立内外等高线与已知部分湖泊边界之间对应点的坡度坡向关系,通过插值获得未知的湖泊边界点,进而生成完整的湖泊边界。具体方法如下:
3.3.1 湖泊水位相对于内等高线上升
如果湖泊水位相对于内等高线C1上升,已知部分湖泊边界L在C1外部,即可利用DEM计算得到L的平均高程值。首先,选取外缓冲区内的湖泊边界,边界个数≥3时,进行异常边界检测,如果该边界高程平均值超过所有边界高程平均值的±1.5倍标准差范围,予以删除。在等高线树中,选择高程值比湖泊边界平均高程值至少大1 m的父等高线,由下层到上层依次判断,该外等高线是否完全包含L,若完全包含,则将该父等高线作为湖泊插值将使用的外等高线C2;若不完全包含,则继续选取上层父等高线进行判断,直到最上层的父等高线;若仍不完全包含L,则将最上层的父等高线作为湖泊插值将使用的外等高线C2。
图7
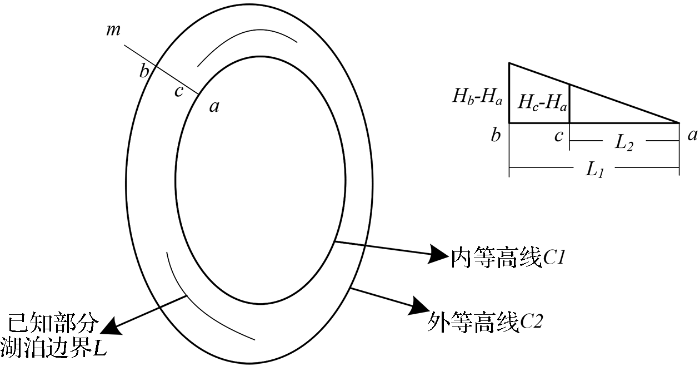
图7
湖泊水位相对于内等高线上升时,未知湖泊边界点的插值示意图
Fig.7
Interpolation of the unknown points in the lake boundary in the case of lake level rising relative to the inner contour
即可计算出线段ab上湖泊边界点c和点a之间的距离L2,从而确定点c的空间位置。
遍历C1上所有点,将得到所有未知湖泊边界点的可能位置,通过最近邻法连接未知湖泊边界点和L上的所有点。选择任一点作为起点开始连接,当剩余点数为总点数的四分之一时,在每次查找最近邻点时,需要比较当前点与下一个最近邻点的距离和当前点与起点的距离,若与起点的距离<当前最近邻距离,则将当前点与起点相连,剩余偏差较大的点将被舍弃;否则将当前点与最近邻点相连,继续进行最近邻连接,最终得到该等高线叶子节点C1对应的完整湖泊边界。
按照上述方法对2015年9月16日的Landsat-8影像进行完整湖泊边界的生成。如图8(a)所示,蓝色线为Canny边缘检测算法提取的长度至少为360 m的闭合水体边界与长度至少为2 000 m的不闭合水体边界,红色线为插值生成的完整湖泊边界。将得到的完整湖泊边界与ZY-3号2015年9月28日影像的手工数字化湖泊边界相叠加,如图8(b)所示,两者结果基本重合,说明本算法提取效果较好。此外,还对5个湖泊的边界长度和面积进行了误差统计,如表2所示。可见5个湖泊的长度差百分比介于-6.21%~8.23%之间,面积差百分比介于-0.06%~2.7%之间。其中达如错、江错和蓬错的长度差较大,与手工数字化结果对比,发现误差主要来源于达如错北部、江错北部、蓬错南部等地势平坦区域(图5)。而面积差除了达如错较大以外,其余湖泊的面积差绝对值都<0.7%,总体而言,该算法在湖泊水位相对于内等高线上升的情况下,对面积的预估较为准确。
图8
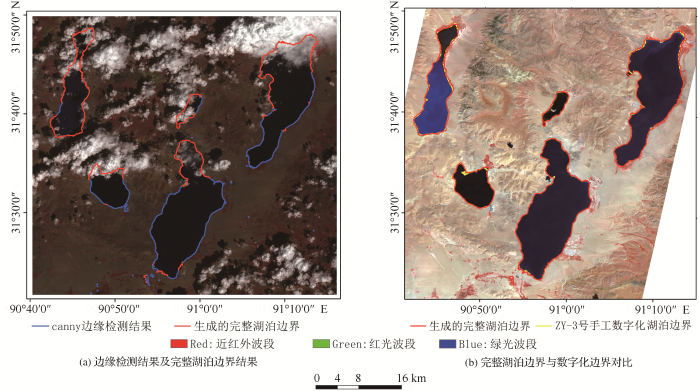
图8
2015年9月16日有云Landsat-8影像提取完整湖泊边界的验证
Fig.8
Validation of complete lake boundaries extracted from a cloudy Landsat-8 image on September 16, 2015
表2 本算法自动提取的2015年湖泊边界与手工数字化边界的长度、面积差异分析
Table 2
| 湖泊名称 | Landsat-8+DEM确定长度/km | ZY-3号影像确定长度/km | 长度差/km | 长度差百分比/% | Landsat-8+DEM确定面积/km2 | ZY-3号影像 确定面积/km2 | 面积差/km2 | 面积差百分比/% |
|---|---|---|---|---|---|---|---|---|
| 达如错 | 59.72 | 55.18 | 4.54 | 8.23 | 71.87 | 69.98 | 1.89 | 2.70 |
| 切里错 | 19.16 | 18.98 | 0.18 | 0.95 | 13.05 | 12.96 | 0.09 | 0.69 |
| 懂错 | 82.46 | 81.45 | 1.01 | 1.24 | 152.06 | 151.11 | 0.95 | 0.63 |
| 江错 | 29.45 | 31.40 | -1.95 | -6.21 | 40.65 | 40.43 | 0.22 | 0.54 |
| 蓬错 | 78.50 | 74.81 | 3.69 | 4.93 | 176.45 | 176.55 | -0.10 | -0.06 |
3.3.2 湖泊水位相对于内等高线下降
如已知部分湖泊边界L在内等高线C1内部,则表明湖泊实际水位相对于C1下降,无法直接根据DEM得到L的高程值。尝试利用C1和大于C1 2 m的外等高线C2估计L的高程,并插值生成未知湖泊边界点。若C1外层只有一条外等高线,则将该外等高线作为湖泊插值将使用的外等高线C2;若C1外层没有等高线则无法进行插值研究,但这种情况极少。
如图9所示,做L上任一点a到C1的最短距离线段,与C1交点为b,线段ab的长度为L2,将线段ab向湖泊外部做延长线m,找到m与C2的交点c,认为线段ac上的坡度不变。根据b、c两点的高程值Hb、Hc及距离L1,可求得线段bc上的坡度,即认为该坡度等于湖泊边界点a到C1上点b的最短距离线段的坡度。根据公式:
图9
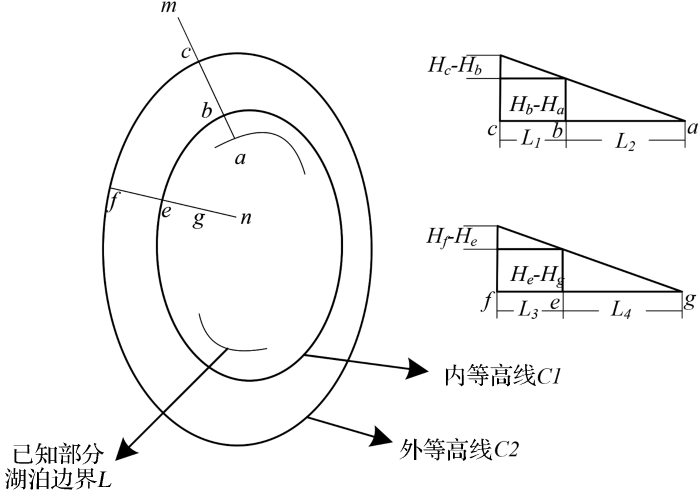
图9
湖泊水面相对于内等高线面下降时,未知湖泊边界点插值示意图
Fig.9
Interpolation of the unknown points in the lake boundary in the case of lake level falling relative to the inner contour
即可计算出湖泊边界点a的高程值Ha。遍历L上每一点,计算出L上所有点的高程值,先将高程值取整,再取众数值作为该湖泊边界的高程值,记为Hg。
将C1使用道格拉斯-普克算法简化后,做C1上任一点e到C2的最短距离线段,如图9所示,线段与C2的交点为f,根据e、f两点的高程值He、Hf及距离L3,即可求得线段fe上的坡度。做线段fe朝湖泊内部方向的一定长度的延长线n,认为延长线n上的坡度与线段fe上的坡度一样,若延长线n与L相交,则不做插值;若延长线n与L不相交,则进行插值,湖泊边界高程Hg与内等高线高程He已知,根据公式:
即可计算出延长线n上未知湖泊边界点g距离内等高线C1上点e的距离L4,从而得到湖泊边界点g的可能位置。遍历C1上每一点,将得到所有未知湖泊边界点的可能位置,通过最近邻法连接未知湖泊边界点和L上的所有点,舍弃部分偏差较大的点,最终得到该等高线叶子节点C1对应的完整湖泊边界。
按照上述方法对1989年9月24日的Landsat-5影像进行完整湖泊边界的生成。如图10(a)所示,蓝色线为Canny边缘检测算法提取的长度至少为360 m的闭合水体边界与长度至少为2 000 m的不闭合水体边界,红色线为插值生成的完整湖泊边界。由于1989年研究区范围内没有更高分辨率的遥感影像,所以将得到的完整湖泊边界与1989年10月26日、无云遮挡的Landsat-5影像的手工数字化湖泊边界相叠加,如图10(b)所示,两者结果基本重合,说明本算法提取效果较好。此外,还对5个湖泊的边界长度和面积进行了误差统计,如表3所示。可见5个湖泊的长度差百分比介于-6.81%~9.4%之间,面积差百分比介于-2.11%~2.5%之间。其中达如错、切里错、江错和蓬错的长度差较大,与手工数字化结果对比,发现误差主要来源于达如错北部、切里错西部、江错北部、蓬错南部等地势较为平缓的区域(图5)。而面积差除了达如错、江错较大以外,其余湖泊的面积差绝对值都<1.9%,总体而言,该算法在湖泊水位相对于内等高线下降的情况下,对面积的预估也较为准确。但是,与湖泊水位相对于内等高线上升的情况相比,该情况下的面积误差可能较大,原因应该是:该情况下无法直接根据DEM获得湖泊边界的高程值,而通过等高线估计得到的高程值可能不准确,导致最终结果误差较大。
图10
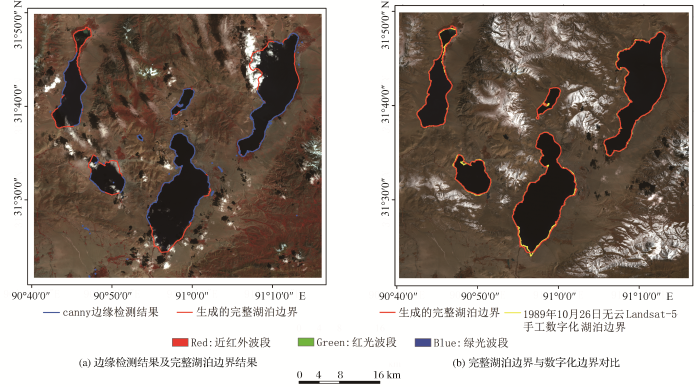
图10
1989年9月24日有云Landsat-5影像提取完整湖泊边界的验证
Fig.10
Validation of complete lake boundaries extracted from a cloudy Landsat-5 image on September 24, 1989
表3 本算法自动提取的1989年湖泊边界与手工数字化边界的长度、面积差异分析
Table3
| 湖泊名称 | Landsat-5+DEM确定长度/km | 无云影像确定长度/km | 长度差/km | 长度差百分比/% | Landsat-5+DEM确定面积/km2 | 无云影像确定 面积/km2 | 面积差/km2 | 面积差百分比/% |
|---|---|---|---|---|---|---|---|---|
| 达如错 | 56.72 | 51.84 | 4.88 | 9.40 | 61.44 | 59.94 | 1.50 | 2.50 |
| 切里错 | 19.48 | 20.55 | -1.07 | -5.21 | 10.66 | 10.86 | -0.20 | -1.84 |
| 懂错 | 72.14 | 71.77 | 0.37 | 0.52 | 131.37 | 133.03 | -1.66 | -1.25 |
| 江错 | 26.68 | 28.63 | -1.95 | -6.81 | 36.17 | 36.95 | -0.78 | -2.11 |
| 蓬错 | 67.43 | 69.10 | -1.67 | -2.42 | 142.31 | 140.76 | 1.55 | 1.10 |
4 结 语
该算法的提出可有效解决遥感影像中湖泊被云部分遮挡时,如何自动提取完整湖泊边界的问题。该算法对Landsat影像去除云、云阴影、雪和山体区域后,对MNDWI计算结果进行Canny边缘检测,得到已知部分湖泊边界;进而,结合DEM数据,利用已知部分湖泊边界和生成的等高线树,根据坡度坡向不变假设,插值生成完整湖泊边界。将提取结果与手工数字化结果对比,基本重合,且精度较高。
该算法使得大量受云等因素影响的遥感影像可以得到充分利用,为研究湖泊长时间序列的年际和季节变化特征,及其对气候变化和冰冻圈变化的响应,提供了高时间分辨率的湖泊数据集;并且该算法自动化程度高,对不同时相、不同区域的影像普适性较高。
该算法的适用条件或不足之处在于:①湖泊必须具有无云遮挡的部分边界;②为了避免部分河流边界、误识别的水体边界(普遍比较短)等的干扰,本算法要求检测出的有效湖泊边界长度至少为2 000 m,才可用于完整湖泊边界的计算生成,因此只适用于面积至少为0.25 km2湖泊;③由于GEE平台上没有高精度等高线的生成算法,所以需要在本地调用arcpy包中的函数。受本地计算量的限制,该算法目前只能应用于约为3 500 km2的区域范围。未来需要在GEE平台实现高精度等高线的生成算法;或通过提前设定湖泊感兴趣区,缩小DEM计算的空间范围等;④对于一些复杂的湖泊情况,该算法目前不一定能实现自动提取,例如湖心岛,需要边缘检测或者人工识别才能将其保留下来,但对于湖泊面积的变化分析影响不大。这些不足之处有待于未来进一步改进。
参考文献
Regional Differences of Lake Evolution Across China during 1960s-2015 and Its Natural and Anthropogenic Causes
[J].
Conceptualizing the Tibetan Plateau: Environmental Constraints on the Peopling of the “Third Pole”
[J].
. China’s Lakes at Present: Number, Area and Spatial Distribution
[J].
中国湖泊的数量, 面积与空间分布
[J].
A Fobust but Variable Lake Expansion on the Tibetan Plateau
[J].
SOLS: A Lake Database to Monitor in the Near Real Time Water Level and Storage Variations from Remote Sensing Data
[J].
Monitoring Lake Level Changes on the Tibetan Plateau Using ICESat Altimetry Data (2003~2009)
[J].
Lake Volume and Groundwater Storage Variations in Tibetan Plateau's Endorheic basin: Water Mass Balance in the TP
[J].
Lake Water Quality Classification with Airborne Hyperspectral Spectrometer and Simulated MERIS Data
[J].
Landsat based interpretation of the Cairns section of the Great Barrier Reef Marine Park
[M].
A Description Model based on Knowledge for Automatically Recognizing Water from NOAA/AVHRR
[J].
基于知识的AVHRR影像的水体自动识别方法与模型研究
[J].
The Use of the Normalized Difference Water Index(NDWI) in the Delineation of Open Water Features
[J].
Study on Water Bodies Extraction and Classification from SPOT Image
[J].
SPOT卫星影像的水体提取方法及分类研究
[J].
A Method for Object-oriented Automatic Extraction of Lakes in the Mountain Area from Remote Sensing Image
[J].
面向对象的山区湖泊信息自动提取方法
[J].
Modification of Normalised Difference Water Index (NDWI) to Enhance Open Water Features in Remotely Sensed Imagery
[J].
Evaluation of NDWI and MNDWI for Assessment of Waterlogging by Integrating Digital Elevation Model and Groundwater Level
[J].
Automatic and High-precise Extraction for Water Information from Multispectral Images with the Step-by-Step Iterative Transformation Mechanism
[J].
分步迭代的多光谱遥感水体信息高精度自动提取
[J].
Automatic Extraction of Himalayan Glacial Lakes with Remote Sensing
[J].
喜马拉雅山地区冰湖信息的遥感自动化提取
[J].
Automated Extraction of Coastline from Satellite Imagery by Integrating Canny Edge Detection and Locally Adaptive Thresholding Mthods
[J].
Lake edge detection using Canny algorithm and Otsu thresholding
[C]∥
Snakes: Active Contour Models
[J].
Irregular Water Boundary Extraction Using GVF Snake
[J].
运用GVF Snake算法提取水域的不规则边界
[J].
An Effective Thin Cloud Removal Procedure for Visible Remote Sensing Images
[J].
The Processing Technology of Removing Clouds Image based on the Multi-resource RS Image
[J].
多源遥感影像的去云层处理
[J].
Removal of Optically Thick Clouds from Multi-spectral Satellite Images Using Multi-frequency SAR Data
[J].
Reconstructing Cloudfree NDVI Composites Using Fourier Analysis of Time Series
[J].
The Application of Time-series Fourier Analysis to Reconstructing Cloud-free NDVI Images
[J].
利用时间序列傅立叶分析重构无云NDVI图像
[J].
The Shuttle Radar Topography Mission
[J].
Cloud Detection Algorithm Comparison and Validation for Operational Landsat Data Products
[J].
A Computation Approach to Edge Detection
[J].
On the Canny Edge Detector
[J].
The Canny Edge Detector Revisited
[J].
Algorithms for the Reduction of the Number of Points Required to Represent a Digitized Line or Its Caricature
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}