To solve the issues of inaccurate bounding box in large-scale remote sensing image object detection, an accurate object detection and localization appoarch of remote sensing image based on Bayesian Optimization is proposed. The method consists of two stages: In the first stage, the EdgeBoxes which is based on edges information is adopted to generate object proposals. The classifier is applied to get initial object detection result. To obtain more accurate bounding box, a bayesian optimization based on gaussian process is applied to fine-tune the bounding box around each object in the second stage. Firstly, a set of boxes that intersect the initial bounding box around each initial box is selected to form a gaussian process. Secondly, a new bounding box is estimated through bayesian optimization and added to the set of boxes. Thirdly, the score of each box is calculated by the classifier, and the box with the highest score is set as the base box in the next iteration. At last, the bayesian optimization process is repeatedand and final bounding boxes is obtained. Experiments demonstrate the EdgeBoxes method can achive a better recall evaluation with less number of propsals. The bayesian optimization based on gaussian process can significantly improve the localization accuracy of the detection bounding box.
Keywords:Remote sensing image
;
Object detection
;
Object accurate locolization
;
Region proposal
;
Gaussian process
;
Bayesian optimization
Chai Dong, Xu Suhui, Luo Chang, Lu Yanchen. Object Accurate Localization of Remote Sensing Image based on Bayesian Optimization. Remote Sensing Technology and Application[J], 2020, 35(6): 1377-1385 doi:10.11873/j.issn.1004-0323.2020.6.1377
1 引 言
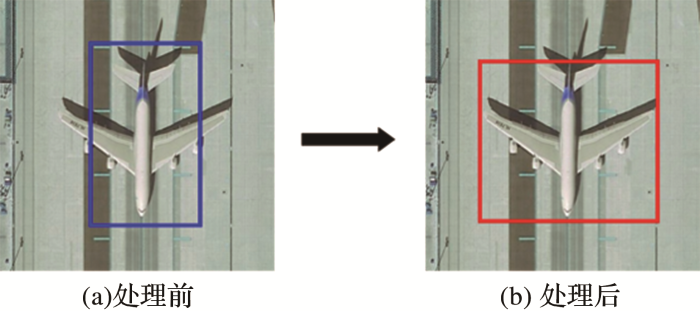
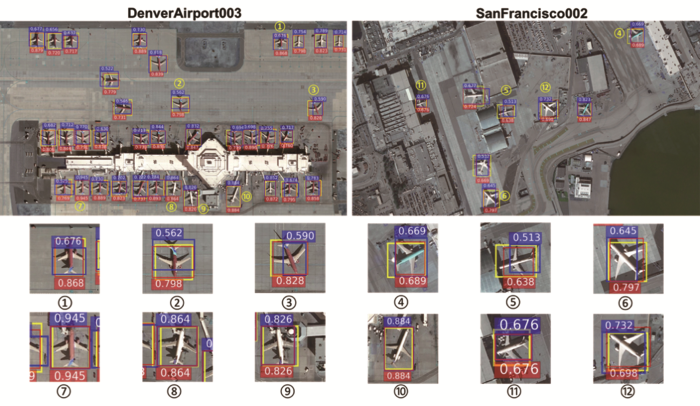
目标检测是遥感影像理解的重要内容[1]。遥感影像目标检测需要完成两个任务:一是判断这幅图像中是否含有目标;二是确定目标在图像中的位置。在目标检测评价体系中,通常使用交叠率(Intersection over Union,IOU)来判定单个目标是否被正确检测,IOU为检测框与真实目标标记窗口的交叠率。当检测框与真实标记窗口的交叠率大于一定值(通常为0.5)时,则判定该检测框检测出了目标。然而当目标检测框与目标真实边框的IOU较小时,检测效果如图1左所示的飞机目标,蓝色边框为检测边框。该边框包括了飞机的主体,但是两边机翼的一部分被排除在外。因此本研究的目标是对初始检测结果进行进一步优化,使检测框更精确包围住整个目标,效果如图1右红色边框所示。
使用深度学习方法对遥感影像特定目标进行检测可以获得图像更好的特征,因此相对于传统特征[3-5],如方向梯度直方图特征(Histogram of Oriented Gradient,HOG)、词袋模型特征(Bag of Words,BoW)及深度学习方法可以取得更高的检测精度,然而其主要瓶颈是对正样本数量要求高。因此主流的方法都沿着两个方向进行:①尽可能地提取出更多的训练样本,如使用弱监督方法[6-7]从含有目标的遥感图像中提取出可靠的图像块进行训练;②使用深度学习方法提取出目标更好的特征。Han等[6]使用BoW特征与玻尔兹曼机学习目标影像块的深度特征。Long等[8]选择了深度卷积神经网络来提取遥感影像特征。Tang等[9]则使用了自动编码器(Autoencoder)对图像进行了特征学习。Yang等[10]使用全卷积网络实现了飞机目标的检测。以上方法使用了复杂的深度学习方法,提高了检测精度,然而目标检测框并不精确,很少有文献关注如何对检测框进行后续处理。
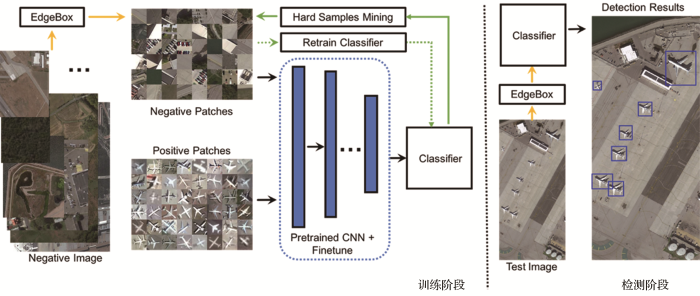
本研究侧重于目标检测边框的优化,因此并没有选择相对复杂的深度学习框架,而是选择了经典的目标检测框架:基于HOG和支持向量机(Support Vector Machine,SVM)的目标检测框架[11]。该框架分为两个阶段:训练阶段,构造正样本集和负样本集,提取所有样本的HOG特征,并将正负样本标记为1和0,将正负样本的特征和标签都输入到SVM中进行训练;测试阶段,在测试图像上使用不同大小的滑动窗口来提取大量候选框,对候选框进行HOG特征提取,使用之前训练好的SVM模型进行预测。预测标签为1的候选框再进行非极大值抑制(Non Maximum Suppression,NMS),形成最终的检测结果。遥感影像尺寸往往较大,例如本文使用的测试图像,尺寸为4 800×2 589,即使使用较大的步长如5,尺寸为100×100滑动窗口产生候选框,则候选框数目将大于4×106。若使用更小的滑动窗口或者更小的步长,候选框数目则会更多,将导致检测效率十分低下[12]。
... 目标检测是遥感影像理解的重要内容[1].遥感影像目标检测需要完成两个任务:一是判断这幅图像中是否含有目标;二是确定目标在图像中的位置.在目标检测评价体系中,通常使用交叠率(Intersection over Union,IOU)来判定单个目标是否被正确检测,IOU为检测框与真实目标标记窗口的交叠率.当检测框与真实标记窗口的交叠率大于一定值(通常为0.5)时,则判定该检测框检测出了目标.然而当目标检测框与目标真实边框的IOU较小时,检测效果如图1左所示的飞机目标,蓝色边框为检测边框.该边框包括了飞机的主体,但是两边机翼的一部分被排除在外.因此本研究的目标是对初始检测结果进行进一步优化,使检测框更精确包围住整个目标,效果如图1右红色边框所示. ...
基于深度卷积神经网络的油罐目标检测研究
1
2019
... 目标检测是遥感影像理解的重要内容[1].遥感影像目标检测需要完成两个任务:一是判断这幅图像中是否含有目标;二是确定目标在图像中的位置.在目标检测评价体系中,通常使用交叠率(Intersection over Union,IOU)来判定单个目标是否被正确检测,IOU为检测框与真实目标标记窗口的交叠率.当检测框与真实标记窗口的交叠率大于一定值(通常为0.5)时,则判定该检测框检测出了目标.然而当目标检测框与目标真实边框的IOU较小时,检测效果如图1左所示的飞机目标,蓝色边框为检测边框.该边框包括了飞机的主体,但是两边机翼的一部分被排除在外.因此本研究的目标是对初始检测结果进行进一步优化,使检测框更精确包围住整个目标,效果如图1右红色边框所示. ...
A Survey on Object Detection in Optical Remote Sensing Images
... 使用深度学习方法对遥感影像特定目标进行检测可以获得图像更好的特征,因此相对于传统特征[3-5],如方向梯度直方图特征(Histogram of Oriented Gradient,HOG)、词袋模型特征(Bag of Words,BoW)及深度学习方法可以取得更高的检测精度,然而其主要瓶颈是对正样本数量要求高.因此主流的方法都沿着两个方向进行:①尽可能地提取出更多的训练样本,如使用弱监督方法[6-7]从含有目标的遥感图像中提取出可靠的图像块进行训练;②使用深度学习方法提取出目标更好的特征.Han等[6]使用BoW特征与玻尔兹曼机学习目标影像块的深度特征.Long等[8]选择了深度卷积神经网络来提取遥感影像特征.Tang等[9]则使用了自动编码器(Autoencoder)对图像进行了特征学习.Yang等[10]使用全卷积网络实现了飞机目标的检测.以上方法使用了复杂的深度学习方法,提高了检测精度,然而目标检测框并不精确,很少有文献关注如何对检测框进行后续处理. ...
车载探地雷达地下目标实时探测法
1
2020
... 使用深度学习方法对遥感影像特定目标进行检测可以获得图像更好的特征,因此相对于传统特征[3-5],如方向梯度直方图特征(Histogram of Oriented Gradient,HOG)、词袋模型特征(Bag of Words,BoW)及深度学习方法可以取得更高的检测精度,然而其主要瓶颈是对正样本数量要求高.因此主流的方法都沿着两个方向进行:①尽可能地提取出更多的训练样本,如使用弱监督方法[6-7]从含有目标的遥感图像中提取出可靠的图像块进行训练;②使用深度学习方法提取出目标更好的特征.Han等[6]使用BoW特征与玻尔兹曼机学习目标影像块的深度特征.Long等[8]选择了深度卷积神经网络来提取遥感影像特征.Tang等[9]则使用了自动编码器(Autoencoder)对图像进行了特征学习.Yang等[10]使用全卷积网络实现了飞机目标的检测.以上方法使用了复杂的深度学习方法,提高了检测精度,然而目标检测框并不精确,很少有文献关注如何对检测框进行后续处理. ...
深度学习U-Net方法及其在高分辨卫星影像分类中的应用. 遥感技术与应用
0
2020
深度学习U-Net方法及其在高分辨卫星影像分类中的应用. 遥感技术与应用
0
2020
可变形网络与迁移学习相结合的电力塔遥感影像目标检测法
1
2020
... 使用深度学习方法对遥感影像特定目标进行检测可以获得图像更好的特征,因此相对于传统特征[3-5],如方向梯度直方图特征(Histogram of Oriented Gradient,HOG)、词袋模型特征(Bag of Words,BoW)及深度学习方法可以取得更高的检测精度,然而其主要瓶颈是对正样本数量要求高.因此主流的方法都沿着两个方向进行:①尽可能地提取出更多的训练样本,如使用弱监督方法[6-7]从含有目标的遥感图像中提取出可靠的图像块进行训练;②使用深度学习方法提取出目标更好的特征.Han等[6]使用BoW特征与玻尔兹曼机学习目标影像块的深度特征.Long等[8]选择了深度卷积神经网络来提取遥感影像特征.Tang等[9]则使用了自动编码器(Autoencoder)对图像进行了特征学习.Yang等[10]使用全卷积网络实现了飞机目标的检测.以上方法使用了复杂的深度学习方法,提高了检测精度,然而目标检测框并不精确,很少有文献关注如何对检测框进行后续处理. ...
可变形网络与迁移学习相结合的电力塔遥感影像目标检测法
1
2020
... 使用深度学习方法对遥感影像特定目标进行检测可以获得图像更好的特征,因此相对于传统特征[3-5],如方向梯度直方图特征(Histogram of Oriented Gradient,HOG)、词袋模型特征(Bag of Words,BoW)及深度学习方法可以取得更高的检测精度,然而其主要瓶颈是对正样本数量要求高.因此主流的方法都沿着两个方向进行:①尽可能地提取出更多的训练样本,如使用弱监督方法[6-7]从含有目标的遥感图像中提取出可靠的图像块进行训练;②使用深度学习方法提取出目标更好的特征.Han等[6]使用BoW特征与玻尔兹曼机学习目标影像块的深度特征.Long等[8]选择了深度卷积神经网络来提取遥感影像特征.Tang等[9]则使用了自动编码器(Autoencoder)对图像进行了特征学习.Yang等[10]使用全卷积网络实现了飞机目标的检测.以上方法使用了复杂的深度学习方法,提高了检测精度,然而目标检测框并不精确,很少有文献关注如何对检测框进行后续处理. ...
Object Detection in Optical Remote Sensing Images based on Weakly Supervised Learning and High-level Feature Learning
2
2015
... 使用深度学习方法对遥感影像特定目标进行检测可以获得图像更好的特征,因此相对于传统特征[3-5],如方向梯度直方图特征(Histogram of Oriented Gradient,HOG)、词袋模型特征(Bag of Words,BoW)及深度学习方法可以取得更高的检测精度,然而其主要瓶颈是对正样本数量要求高.因此主流的方法都沿着两个方向进行:①尽可能地提取出更多的训练样本,如使用弱监督方法[6-7]从含有目标的遥感图像中提取出可靠的图像块进行训练;②使用深度学习方法提取出目标更好的特征.Han等[6]使用BoW特征与玻尔兹曼机学习目标影像块的深度特征.Long等[8]选择了深度卷积神经网络来提取遥感影像特征.Tang等[9]则使用了自动编码器(Autoencoder)对图像进行了特征学习.Yang等[10]使用全卷积网络实现了飞机目标的检测.以上方法使用了复杂的深度学习方法,提高了检测精度,然而目标检测框并不精确,很少有文献关注如何对检测框进行后续处理. ...
Weakly Supervised Learning based on Coupled Convolutional Neural Networks for Aircraft Detection
1
2016
... 使用深度学习方法对遥感影像特定目标进行检测可以获得图像更好的特征,因此相对于传统特征[3-5],如方向梯度直方图特征(Histogram of Oriented Gradient,HOG)、词袋模型特征(Bag of Words,BoW)及深度学习方法可以取得更高的检测精度,然而其主要瓶颈是对正样本数量要求高.因此主流的方法都沿着两个方向进行:①尽可能地提取出更多的训练样本,如使用弱监督方法[6-7]从含有目标的遥感图像中提取出可靠的图像块进行训练;②使用深度学习方法提取出目标更好的特征.Han等[6]使用BoW特征与玻尔兹曼机学习目标影像块的深度特征.Long等[8]选择了深度卷积神经网络来提取遥感影像特征.Tang等[9]则使用了自动编码器(Autoencoder)对图像进行了特征学习.Yang等[10]使用全卷积网络实现了飞机目标的检测.以上方法使用了复杂的深度学习方法,提高了检测精度,然而目标检测框并不精确,很少有文献关注如何对检测框进行后续处理. ...
Accurate Object Localization in Remote Sensing Images based on Convolutional Neural Networks
2
2017
... 使用深度学习方法对遥感影像特定目标进行检测可以获得图像更好的特征,因此相对于传统特征[3-5],如方向梯度直方图特征(Histogram of Oriented Gradient,HOG)、词袋模型特征(Bag of Words,BoW)及深度学习方法可以取得更高的检测精度,然而其主要瓶颈是对正样本数量要求高.因此主流的方法都沿着两个方向进行:①尽可能地提取出更多的训练样本,如使用弱监督方法[6-7]从含有目标的遥感图像中提取出可靠的图像块进行训练;②使用深度学习方法提取出目标更好的特征.Han等[6]使用BoW特征与玻尔兹曼机学习目标影像块的深度特征.Long等[8]选择了深度卷积神经网络来提取遥感影像特征.Tang等[9]则使用了自动编码器(Autoencoder)对图像进行了特征学习.Yang等[10]使用全卷积网络实现了飞机目标的检测.以上方法使用了复杂的深度学习方法,提高了检测精度,然而目标检测框并不精确,很少有文献关注如何对检测框进行后续处理. ...
Compressed-Domain Ship Detection on Spaceborne Optical Image Using Deep Neural Network and Extreme Learning Machine
1
2014
... 使用深度学习方法对遥感影像特定目标进行检测可以获得图像更好的特征,因此相对于传统特征[3-5],如方向梯度直方图特征(Histogram of Oriented Gradient,HOG)、词袋模型特征(Bag of Words,BoW)及深度学习方法可以取得更高的检测精度,然而其主要瓶颈是对正样本数量要求高.因此主流的方法都沿着两个方向进行:①尽可能地提取出更多的训练样本,如使用弱监督方法[6-7]从含有目标的遥感图像中提取出可靠的图像块进行训练;②使用深度学习方法提取出目标更好的特征.Han等[6]使用BoW特征与玻尔兹曼机学习目标影像块的深度特征.Long等[8]选择了深度卷积神经网络来提取遥感影像特征.Tang等[9]则使用了自动编码器(Autoencoder)对图像进行了特征学习.Yang等[10]使用全卷积网络实现了飞机目标的检测.以上方法使用了复杂的深度学习方法,提高了检测精度,然而目标检测框并不精确,很少有文献关注如何对检测框进行后续处理. ...
... 使用深度学习方法对遥感影像特定目标进行检测可以获得图像更好的特征,因此相对于传统特征[3-5],如方向梯度直方图特征(Histogram of Oriented Gradient,HOG)、词袋模型特征(Bag of Words,BoW)及深度学习方法可以取得更高的检测精度,然而其主要瓶颈是对正样本数量要求高.因此主流的方法都沿着两个方向进行:①尽可能地提取出更多的训练样本,如使用弱监督方法[6-7]从含有目标的遥感图像中提取出可靠的图像块进行训练;②使用深度学习方法提取出目标更好的特征.Han等[6]使用BoW特征与玻尔兹曼机学习目标影像块的深度特征.Long等[8]选择了深度卷积神经网络来提取遥感影像特征.Tang等[9]则使用了自动编码器(Autoencoder)对图像进行了特征学习.Yang等[10]使用全卷积网络实现了飞机目标的检测.以上方法使用了复杂的深度学习方法,提高了检测精度,然而目标检测框并不精确,很少有文献关注如何对检测框进行后续处理. ...
IEEE Computer Society Conference on
1
2005
... 本研究侧重于目标检测边框的优化,因此并没有选择相对复杂的深度学习框架,而是选择了经典的目标检测框架:基于HOG和支持向量机(Support Vector Machine,SVM)的目标检测框架[11].该框架分为两个阶段:训练阶段,构造正样本集和负样本集,提取所有样本的HOG特征,并将正负样本标记为1和0,将正负样本的特征和标签都输入到SVM中进行训练;测试阶段,在测试图像上使用不同大小的滑动窗口来提取大量候选框,对候选框进行HOG特征提取,使用之前训练好的SVM模型进行预测.预测标签为1的候选框再进行非极大值抑制(Non Maximum Suppression,NMS),形成最终的检测结果.遥感影像尺寸往往较大,例如本文使用的测试图像,尺寸为4 800×2 589,即使使用较大的步长如5,尺寸为100×100滑动窗口产生候选框,则候选框数目将大于4×106.若使用更小的滑动窗口或者更小的步长,候选框数目则会更多,将导致检测效率十分低下[12]. ...
IEEE Computer Society Conference on
1
2005
... 本研究侧重于目标检测边框的优化,因此并没有选择相对复杂的深度学习框架,而是选择了经典的目标检测框架:基于HOG和支持向量机(Support Vector Machine,SVM)的目标检测框架[11].该框架分为两个阶段:训练阶段,构造正样本集和负样本集,提取所有样本的HOG特征,并将正负样本标记为1和0,将正负样本的特征和标签都输入到SVM中进行训练;测试阶段,在测试图像上使用不同大小的滑动窗口来提取大量候选框,对候选框进行HOG特征提取,使用之前训练好的SVM模型进行预测.预测标签为1的候选框再进行非极大值抑制(Non Maximum Suppression,NMS),形成最终的检测结果.遥感影像尺寸往往较大,例如本文使用的测试图像,尺寸为4 800×2 589,即使使用较大的步长如5,尺寸为100×100滑动窗口产生候选框,则候选框数目将大于4×106.若使用更小的滑动窗口或者更小的步长,候选框数目则会更多,将导致检测效率十分低下[12]. ...
What Makes for Effective Detection Proposals?
1
2016
... 本研究侧重于目标检测边框的优化,因此并没有选择相对复杂的深度学习框架,而是选择了经典的目标检测框架:基于HOG和支持向量机(Support Vector Machine,SVM)的目标检测框架[11].该框架分为两个阶段:训练阶段,构造正样本集和负样本集,提取所有样本的HOG特征,并将正负样本标记为1和0,将正负样本的特征和标签都输入到SVM中进行训练;测试阶段,在测试图像上使用不同大小的滑动窗口来提取大量候选框,对候选框进行HOG特征提取,使用之前训练好的SVM模型进行预测.预测标签为1的候选框再进行非极大值抑制(Non Maximum Suppression,NMS),形成最终的检测结果.遥感影像尺寸往往较大,例如本文使用的测试图像,尺寸为4 800×2 589,即使使用较大的步长如5,尺寸为100×100滑动窗口产生候选框,则候选框数目将大于4×106.若使用更小的滑动窗口或者更小的步长,候选框数目则会更多,将导致检测效率十分低下[12]. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}