Soil moisture experiment in the Luan river supporting new satellite mission opportunities
1
2020
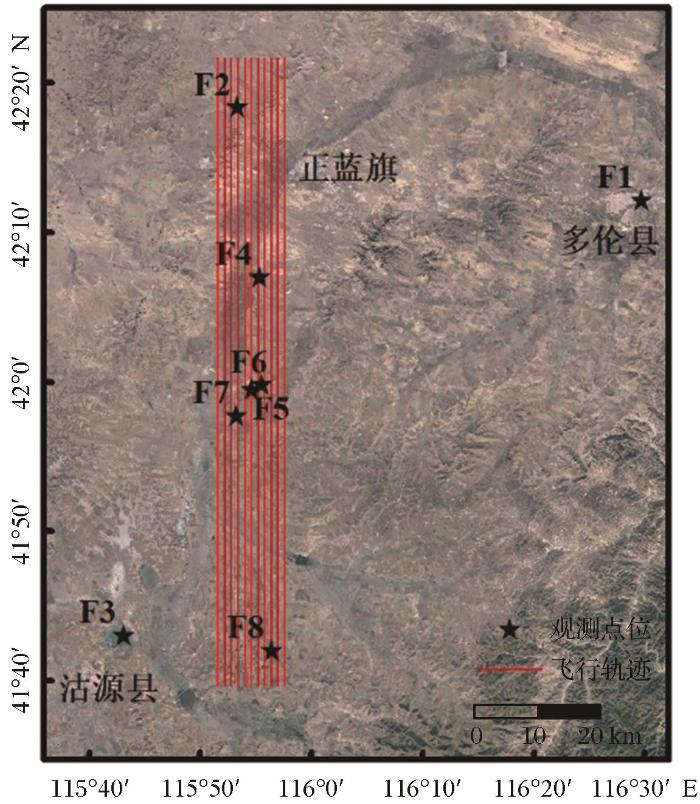
... 空间遥感通过卫星平台的在轨运动,实现高重复率观测,为大尺度的地表参数反演提供了有效的信息获取手段.为研究全球水循环、能量循环机理与过程,我国计划近几年内发射搭载L波段微波辐射计的遥感卫星,为此,2018年9月在华北地区的闪电河流域进行了航空遥感综合试验[1],旨在验证已有仪器性能及算法的可靠性,并在地面进行同步测量试验,用以对比验证航空测量数据.期间,中国科学院东北地理与农业生态研究所开展了地基L波段微波辐射计移动测量试验,检测试验区的射频干扰环境. ...
[中华人民共和国无线电频率划分规定
1
2014
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
340 of Radio Regulations of International Telecommunications Union – Radiocommunications sector
1
5
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
被动微波反演土壤水分的L波段新发展及未来展望
2
2018
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
... [4,7,14-15]. ...
被动微波反演土壤水分的L波段新发展及未来展望
2
2018
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
... [4,7,14-15]. ...
L-band RFI detected by SMOS and Aquarius
2
2017
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
... Soldo也强调,射频干扰的检测细节与微波辐射计的体制有关[5],文献[16]~[19]所述方法都是基于全数字微波辐射计开发的,而我国目前大多数微波辐射计接收机由于含有检波器和积分电路,射频干扰在时域和频域内的细节已经无法完全体现,且微波辐射计的输出在统计域内已经不再满足高斯分布,所以以上射频干扰检测算法无法直接应用.笔者利用自主研制的数字增益自动补偿型L波段微波辐射计,应用在此基础上提出的中值比较算法以及改进的时域脉冲检测算法,在闪电河流域进行射频干扰检测与抑制研究并对试验区的电磁环境进行了评述. ...
SMOS payload status after six years in orbit operational and thermal performance, calibration strategy & RFI management
0
2016
SMAP L-band microwave radiometer: RFI mitigation prelaunch analysis and first year on-orbit observations
2
2016
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
... 射频干扰使得微波辐射计的输出结果在时域、频域及统计域内出现异常现象,Niamsuwan等[16]提出了一种时域脉冲检测算法,在时域范围内检测微波辐射计的异常值,并通过模拟数据对该算法的性能及参数选取进行了分析,表明该算法很适合消除幅值较大、宽度窄的脉冲干扰信号;Guner等[17-18]将测量数据进行傅立叶变换,对频域内的奇异值进行检测并滤除,研究表明该方法对占空比较大或连续的正弦干扰具有一定的可行性.Ruf等[19]研制了一种敏捷式的数字辐射计接收机,能够将24 MHz的中频带宽划分为16个1.5 MHz的子带,并分别计算各个子带的峰度,依此判断接收信号是否满足高斯分布,进而进行射频干扰检测.除了以上的理论研究与模拟数据验证,各种算法还在空基实验中得到了实际的应用[20],2005~2008年欧空局在欧洲和澳大利亚组织了多次航空遥感实验,Skou等[21]应用峰度检测与极化检测法对多次实验结果进行分析,得出了不同地区的射频干扰特性;NASA也在北美进行了多次航空遥感飞行实验,Aksoy等[22]在对SMAPVEX12航空实验数据进行分析时指出:该地区(加拿大温尼伯市)的射频干扰以窄频带脉冲型为主,多种类型并存,干扰幅度并无明显特征,并探讨了不同算法对各种类型干扰的适用性.SMAP卫星采用真实孔径观测方案,在研发阶段充分考虑了射频干扰的检测与抑制,将以上算法相融合,RFI的检测与抑制效果较好[7];SMOS卫星搭载的综合孔径微波辐射计(MIRAS)包含72个微波辐射接收单元,地面某一像元的微波亮温由来自这些接收单元的信号两两相关后经过量化得到,但亮温的时间分辨率已经为1.2 s[23],信号的时域与频域特性已经丢失,统计特征也发生了变化,前面所述方法均不能直接应用,地面所进行射频干扰检测方法只能采用有限的阈值法、空域法、极化法等,效果有限. ...
基于SMOS卫星数据的中国地区L波段射频干扰研究
1
2016
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
基于SMOS卫星数据的中国地区L波段射频干扰研究
1
2016
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
Refinement of SMOS multiangular brightness temperature toward soil moisture retrieval and its analysis over reference targets
1
2015
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
基于多频被动微波遥感的土壤水分反演—以黑河上游为例
1
2020
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
基于多频被动微波遥感的土壤水分反演—以黑河上游为例
1
2020
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
1
National Aeronautics and Space Administration, 2014
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
SMOS: the mission and the system
1
2008
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
The Soil Moisture Active Passive (SMAP) mission
1
2010
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
Detection and mitigation of radiometers radio-frequency interference by using the local outlier factor
1
2017
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
SMOS radio frequency interference scenario: status and actions taken to improve the RFI environment in the 1 400~1 427 MHz passive band
1
2012
... 根据国际电信联盟频率划分规定与《中华人民共和国无线电频率划分规定》,L波段(1~2 GHz)被广泛用于无线电导航、无线电定位以及移动电话等业务,被动微波测量被限制在1 400~1 427 MHz之间[2-3],主要用于土壤湿度和海水盐度探测,但这27 MHz的频带也时常会被一些主动设备所侵扰,包括非法侵占以及谐波的影响都会产生射频干扰,对微波辐射计的观测造成了严重的影响[4].国际上已经发射了3颗土壤湿度和海水盐度空间探测计划:SMOS(Soil Moisture and Ocean Salinity),Aquarius和SMAP(Soil Moisture Active and Passive),其L波段微波辐射计都受到了不同程度的射频干扰影响[5-8],导致数据不可用或地表参数反演精度下降[9-10].根据被动微波土壤水分反演模型,在某些特定条件下,1 K量级的干扰可能会引起约1 cm3/cm3的反演误差[11].虽然SMOS与SMAP的仪器测量不确定度要求分别为3.5 K和1.3 K,但对土壤水分反演精度要求都为4 cm3/cm3[12-13]; Aquarius的科学目标为测量海水盐度以支持环境和气候变化研究,在开阔海域要求0.2实际盐度标度(Practical Salinity Scale, PSU)的精度,为此接收机的探测灵敏度要达到0.06 K(5.76秒积分时间).由于射频干扰的原因,以上设计指标在很多地区都无法实现,必须进行射频干扰的检测与抑制工作[4,7,14-15]. ...
Examination of a simple pulse blanking technique for RFI mitigation
3
2005
... 射频干扰使得微波辐射计的输出结果在时域、频域及统计域内出现异常现象,Niamsuwan等[16]提出了一种时域脉冲检测算法,在时域范围内检测微波辐射计的异常值,并通过模拟数据对该算法的性能及参数选取进行了分析,表明该算法很适合消除幅值较大、宽度窄的脉冲干扰信号;Guner等[17-18]将测量数据进行傅立叶变换,对频域内的奇异值进行检测并滤除,研究表明该方法对占空比较大或连续的正弦干扰具有一定的可行性.Ruf等[19]研制了一种敏捷式的数字辐射计接收机,能够将24 MHz的中频带宽划分为16个1.5 MHz的子带,并分别计算各个子带的峰度,依此判断接收信号是否满足高斯分布,进而进行射频干扰检测.除了以上的理论研究与模拟数据验证,各种算法还在空基实验中得到了实际的应用[20],2005~2008年欧空局在欧洲和澳大利亚组织了多次航空遥感实验,Skou等[21]应用峰度检测与极化检测法对多次实验结果进行分析,得出了不同地区的射频干扰特性;NASA也在北美进行了多次航空遥感飞行实验,Aksoy等[22]在对SMAPVEX12航空实验数据进行分析时指出:该地区(加拿大温尼伯市)的射频干扰以窄频带脉冲型为主,多种类型并存,干扰幅度并无明显特征,并探讨了不同算法对各种类型干扰的适用性.SMAP卫星采用真实孔径观测方案,在研发阶段充分考虑了射频干扰的检测与抑制,将以上算法相融合,RFI的检测与抑制效果较好[7];SMOS卫星搭载的综合孔径微波辐射计(MIRAS)包含72个微波辐射接收单元,地面某一像元的微波亮温由来自这些接收单元的信号两两相关后经过量化得到,但亮温的时间分辨率已经为1.2 s[23],信号的时域与频域特性已经丢失,统计特征也发生了变化,前面所述方法均不能直接应用,地面所进行射频干扰检测方法只能采用有限的阈值法、空域法、极化法等,效果有限. ...
... Soldo也强调,射频干扰的检测细节与微波辐射计的体制有关[5],文献[16]~[19]所述方法都是基于全数字微波辐射计开发的,而我国目前大多数微波辐射计接收机由于含有检波器和积分电路,射频干扰在时域和频域内的细节已经无法完全体现,且微波辐射计的输出在统计域内已经不再满足高斯分布,所以以上射频干扰检测算法无法直接应用.笔者利用自主研制的数字增益自动补偿型L波段微波辐射计,应用在此基础上提出的中值比较算法以及改进的时域脉冲检测算法,在闪电河流域进行射频干扰检测与抑制研究并对试验区的电磁环境进行了评述. ...
... 对应的σ和m分别是测量亮温的标准差和均值,β参数决定着算法的灵敏度.Niamsuwan对算法中的各参数给出了详细的说明及计算方法[16].由于辐射计接收机中存在硬件积分电路,所以文献[31]对该算法进行了一些改进,主要体现在以下方面. ...
Performance study of a cross-frequency detection algorithm for pulsed sinusoidal RFI in microwave radiometry
1
2010
... 射频干扰使得微波辐射计的输出结果在时域、频域及统计域内出现异常现象,Niamsuwan等[16]提出了一种时域脉冲检测算法,在时域范围内检测微波辐射计的异常值,并通过模拟数据对该算法的性能及参数选取进行了分析,表明该算法很适合消除幅值较大、宽度窄的脉冲干扰信号;Guner等[17-18]将测量数据进行傅立叶变换,对频域内的奇异值进行检测并滤除,研究表明该方法对占空比较大或连续的正弦干扰具有一定的可行性.Ruf等[19]研制了一种敏捷式的数字辐射计接收机,能够将24 MHz的中频带宽划分为16个1.5 MHz的子带,并分别计算各个子带的峰度,依此判断接收信号是否满足高斯分布,进而进行射频干扰检测.除了以上的理论研究与模拟数据验证,各种算法还在空基实验中得到了实际的应用[20],2005~2008年欧空局在欧洲和澳大利亚组织了多次航空遥感实验,Skou等[21]应用峰度检测与极化检测法对多次实验结果进行分析,得出了不同地区的射频干扰特性;NASA也在北美进行了多次航空遥感飞行实验,Aksoy等[22]在对SMAPVEX12航空实验数据进行分析时指出:该地区(加拿大温尼伯市)的射频干扰以窄频带脉冲型为主,多种类型并存,干扰幅度并无明显特征,并探讨了不同算法对各种类型干扰的适用性.SMAP卫星采用真实孔径观测方案,在研发阶段充分考虑了射频干扰的检测与抑制,将以上算法相融合,RFI的检测与抑制效果较好[7];SMOS卫星搭载的综合孔径微波辐射计(MIRAS)包含72个微波辐射接收单元,地面某一像元的微波亮温由来自这些接收单元的信号两两相关后经过量化得到,但亮温的时间分辨率已经为1.2 s[23],信号的时域与频域特性已经丢失,统计特征也发生了变化,前面所述方法均不能直接应用,地面所进行射频干扰检测方法只能采用有限的阈值法、空域法、极化法等,效果有限. ...
Time and frequency blanking for radio-frequency interference mitigation in microwave radiometry
1
2007
... 射频干扰使得微波辐射计的输出结果在时域、频域及统计域内出现异常现象,Niamsuwan等[16]提出了一种时域脉冲检测算法,在时域范围内检测微波辐射计的异常值,并通过模拟数据对该算法的性能及参数选取进行了分析,表明该算法很适合消除幅值较大、宽度窄的脉冲干扰信号;Guner等[17-18]将测量数据进行傅立叶变换,对频域内的奇异值进行检测并滤除,研究表明该方法对占空比较大或连续的正弦干扰具有一定的可行性.Ruf等[19]研制了一种敏捷式的数字辐射计接收机,能够将24 MHz的中频带宽划分为16个1.5 MHz的子带,并分别计算各个子带的峰度,依此判断接收信号是否满足高斯分布,进而进行射频干扰检测.除了以上的理论研究与模拟数据验证,各种算法还在空基实验中得到了实际的应用[20],2005~2008年欧空局在欧洲和澳大利亚组织了多次航空遥感实验,Skou等[21]应用峰度检测与极化检测法对多次实验结果进行分析,得出了不同地区的射频干扰特性;NASA也在北美进行了多次航空遥感飞行实验,Aksoy等[22]在对SMAPVEX12航空实验数据进行分析时指出:该地区(加拿大温尼伯市)的射频干扰以窄频带脉冲型为主,多种类型并存,干扰幅度并无明显特征,并探讨了不同算法对各种类型干扰的适用性.SMAP卫星采用真实孔径观测方案,在研发阶段充分考虑了射频干扰的检测与抑制,将以上算法相融合,RFI的检测与抑制效果较好[7];SMOS卫星搭载的综合孔径微波辐射计(MIRAS)包含72个微波辐射接收单元,地面某一像元的微波亮温由来自这些接收单元的信号两两相关后经过量化得到,但亮温的时间分辨率已经为1.2 s[23],信号的时域与频域特性已经丢失,统计特征也发生了变化,前面所述方法均不能直接应用,地面所进行射频干扰检测方法只能采用有限的阈值法、空域法、极化法等,效果有限. ...
RFI detection and mitigation for microwave radiometry with an agile digital detector
1
2006
... 射频干扰使得微波辐射计的输出结果在时域、频域及统计域内出现异常现象,Niamsuwan等[16]提出了一种时域脉冲检测算法,在时域范围内检测微波辐射计的异常值,并通过模拟数据对该算法的性能及参数选取进行了分析,表明该算法很适合消除幅值较大、宽度窄的脉冲干扰信号;Guner等[17-18]将测量数据进行傅立叶变换,对频域内的奇异值进行检测并滤除,研究表明该方法对占空比较大或连续的正弦干扰具有一定的可行性.Ruf等[19]研制了一种敏捷式的数字辐射计接收机,能够将24 MHz的中频带宽划分为16个1.5 MHz的子带,并分别计算各个子带的峰度,依此判断接收信号是否满足高斯分布,进而进行射频干扰检测.除了以上的理论研究与模拟数据验证,各种算法还在空基实验中得到了实际的应用[20],2005~2008年欧空局在欧洲和澳大利亚组织了多次航空遥感实验,Skou等[21]应用峰度检测与极化检测法对多次实验结果进行分析,得出了不同地区的射频干扰特性;NASA也在北美进行了多次航空遥感飞行实验,Aksoy等[22]在对SMAPVEX12航空实验数据进行分析时指出:该地区(加拿大温尼伯市)的射频干扰以窄频带脉冲型为主,多种类型并存,干扰幅度并无明显特征,并探讨了不同算法对各种类型干扰的适用性.SMAP卫星采用真实孔径观测方案,在研发阶段充分考虑了射频干扰的检测与抑制,将以上算法相融合,RFI的检测与抑制效果较好[7];SMOS卫星搭载的综合孔径微波辐射计(MIRAS)包含72个微波辐射接收单元,地面某一像元的微波亮温由来自这些接收单元的信号两两相关后经过量化得到,但亮温的时间分辨率已经为1.2 s[23],信号的时域与频域特性已经丢失,统计特征也发生了变化,前面所述方法均不能直接应用,地面所进行射频干扰检测方法只能采用有限的阈值法、空域法、极化法等,效果有限. ...
Analysis of RFI identifi-cation and mitigation in CAROLS radiometer data using a hardware spectrum analyser
1
2011
... 射频干扰使得微波辐射计的输出结果在时域、频域及统计域内出现异常现象,Niamsuwan等[16]提出了一种时域脉冲检测算法,在时域范围内检测微波辐射计的异常值,并通过模拟数据对该算法的性能及参数选取进行了分析,表明该算法很适合消除幅值较大、宽度窄的脉冲干扰信号;Guner等[17-18]将测量数据进行傅立叶变换,对频域内的奇异值进行检测并滤除,研究表明该方法对占空比较大或连续的正弦干扰具有一定的可行性.Ruf等[19]研制了一种敏捷式的数字辐射计接收机,能够将24 MHz的中频带宽划分为16个1.5 MHz的子带,并分别计算各个子带的峰度,依此判断接收信号是否满足高斯分布,进而进行射频干扰检测.除了以上的理论研究与模拟数据验证,各种算法还在空基实验中得到了实际的应用[20],2005~2008年欧空局在欧洲和澳大利亚组织了多次航空遥感实验,Skou等[21]应用峰度检测与极化检测法对多次实验结果进行分析,得出了不同地区的射频干扰特性;NASA也在北美进行了多次航空遥感飞行实验,Aksoy等[22]在对SMAPVEX12航空实验数据进行分析时指出:该地区(加拿大温尼伯市)的射频干扰以窄频带脉冲型为主,多种类型并存,干扰幅度并无明显特征,并探讨了不同算法对各种类型干扰的适用性.SMAP卫星采用真实孔径观测方案,在研发阶段充分考虑了射频干扰的检测与抑制,将以上算法相融合,RFI的检测与抑制效果较好[7];SMOS卫星搭载的综合孔径微波辐射计(MIRAS)包含72个微波辐射接收单元,地面某一像元的微波亮温由来自这些接收单元的信号两两相关后经过量化得到,但亮温的时间分辨率已经为1.2 s[23],信号的时域与频域特性已经丢失,统计特征也发生了变化,前面所述方法均不能直接应用,地面所进行射频干扰检测方法只能采用有限的阈值法、空域法、极化法等,效果有限. ...
L-band RFI as experienced during airborne campaigns in preparation for SMOS
1
2010
... 射频干扰使得微波辐射计的输出结果在时域、频域及统计域内出现异常现象,Niamsuwan等[16]提出了一种时域脉冲检测算法,在时域范围内检测微波辐射计的异常值,并通过模拟数据对该算法的性能及参数选取进行了分析,表明该算法很适合消除幅值较大、宽度窄的脉冲干扰信号;Guner等[17-18]将测量数据进行傅立叶变换,对频域内的奇异值进行检测并滤除,研究表明该方法对占空比较大或连续的正弦干扰具有一定的可行性.Ruf等[19]研制了一种敏捷式的数字辐射计接收机,能够将24 MHz的中频带宽划分为16个1.5 MHz的子带,并分别计算各个子带的峰度,依此判断接收信号是否满足高斯分布,进而进行射频干扰检测.除了以上的理论研究与模拟数据验证,各种算法还在空基实验中得到了实际的应用[20],2005~2008年欧空局在欧洲和澳大利亚组织了多次航空遥感实验,Skou等[21]应用峰度检测与极化检测法对多次实验结果进行分析,得出了不同地区的射频干扰特性;NASA也在北美进行了多次航空遥感飞行实验,Aksoy等[22]在对SMAPVEX12航空实验数据进行分析时指出:该地区(加拿大温尼伯市)的射频干扰以窄频带脉冲型为主,多种类型并存,干扰幅度并无明显特征,并探讨了不同算法对各种类型干扰的适用性.SMAP卫星采用真实孔径观测方案,在研发阶段充分考虑了射频干扰的检测与抑制,将以上算法相融合,RFI的检测与抑制效果较好[7];SMOS卫星搭载的综合孔径微波辐射计(MIRAS)包含72个微波辐射接收单元,地面某一像元的微波亮温由来自这些接收单元的信号两两相关后经过量化得到,但亮温的时间分辨率已经为1.2 s[23],信号的时域与频域特性已经丢失,统计特征也发生了变化,前面所述方法均不能直接应用,地面所进行射频干扰检测方法只能采用有限的阈值法、空域法、极化法等,效果有限. ...
L-band radio-frequency interference observations during the SMAP validation experiment 2012
1
2016
... 射频干扰使得微波辐射计的输出结果在时域、频域及统计域内出现异常现象,Niamsuwan等[16]提出了一种时域脉冲检测算法,在时域范围内检测微波辐射计的异常值,并通过模拟数据对该算法的性能及参数选取进行了分析,表明该算法很适合消除幅值较大、宽度窄的脉冲干扰信号;Guner等[17-18]将测量数据进行傅立叶变换,对频域内的奇异值进行检测并滤除,研究表明该方法对占空比较大或连续的正弦干扰具有一定的可行性.Ruf等[19]研制了一种敏捷式的数字辐射计接收机,能够将24 MHz的中频带宽划分为16个1.5 MHz的子带,并分别计算各个子带的峰度,依此判断接收信号是否满足高斯分布,进而进行射频干扰检测.除了以上的理论研究与模拟数据验证,各种算法还在空基实验中得到了实际的应用[20],2005~2008年欧空局在欧洲和澳大利亚组织了多次航空遥感实验,Skou等[21]应用峰度检测与极化检测法对多次实验结果进行分析,得出了不同地区的射频干扰特性;NASA也在北美进行了多次航空遥感飞行实验,Aksoy等[22]在对SMAPVEX12航空实验数据进行分析时指出:该地区(加拿大温尼伯市)的射频干扰以窄频带脉冲型为主,多种类型并存,干扰幅度并无明显特征,并探讨了不同算法对各种类型干扰的适用性.SMAP卫星采用真实孔径观测方案,在研发阶段充分考虑了射频干扰的检测与抑制,将以上算法相融合,RFI的检测与抑制效果较好[7];SMOS卫星搭载的综合孔径微波辐射计(MIRAS)包含72个微波辐射接收单元,地面某一像元的微波亮温由来自这些接收单元的信号两两相关后经过量化得到,但亮温的时间分辨率已经为1.2 s[23],信号的时域与频域特性已经丢失,统计特征也发生了变化,前面所述方法均不能直接应用,地面所进行射频干扰检测方法只能采用有限的阈值法、空域法、极化法等,效果有限. ...
SMOS: The payload
1
2008
... 射频干扰使得微波辐射计的输出结果在时域、频域及统计域内出现异常现象,Niamsuwan等[16]提出了一种时域脉冲检测算法,在时域范围内检测微波辐射计的异常值,并通过模拟数据对该算法的性能及参数选取进行了分析,表明该算法很适合消除幅值较大、宽度窄的脉冲干扰信号;Guner等[17-18]将测量数据进行傅立叶变换,对频域内的奇异值进行检测并滤除,研究表明该方法对占空比较大或连续的正弦干扰具有一定的可行性.Ruf等[19]研制了一种敏捷式的数字辐射计接收机,能够将24 MHz的中频带宽划分为16个1.5 MHz的子带,并分别计算各个子带的峰度,依此判断接收信号是否满足高斯分布,进而进行射频干扰检测.除了以上的理论研究与模拟数据验证,各种算法还在空基实验中得到了实际的应用[20],2005~2008年欧空局在欧洲和澳大利亚组织了多次航空遥感实验,Skou等[21]应用峰度检测与极化检测法对多次实验结果进行分析,得出了不同地区的射频干扰特性;NASA也在北美进行了多次航空遥感飞行实验,Aksoy等[22]在对SMAPVEX12航空实验数据进行分析时指出:该地区(加拿大温尼伯市)的射频干扰以窄频带脉冲型为主,多种类型并存,干扰幅度并无明显特征,并探讨了不同算法对各种类型干扰的适用性.SMAP卫星采用真实孔径观测方案,在研发阶段充分考虑了射频干扰的检测与抑制,将以上算法相融合,RFI的检测与抑制效果较好[7];SMOS卫星搭载的综合孔径微波辐射计(MIRAS)包含72个微波辐射接收单元,地面某一像元的微波亮温由来自这些接收单元的信号两两相关后经过量化得到,但亮温的时间分辨率已经为1.2 s[23],信号的时域与频域特性已经丢失,统计特征也发生了变化,前面所述方法均不能直接应用,地面所进行射频干扰检测方法只能采用有限的阈值法、空域法、极化法等,效果有限. ...
Aquarius active/passive RFI environment at L-band
1
2014
... 在电磁环境方面,Le Vine[24]首先给出了Aquarius主被动微波遥感的全球RFI情况,Soldo等[25]通过定义RFI指数,量化了SMOS数据在全球的污染程度,并且Soldo等[26]还应用SMAP数据在全球范围开展了干扰源定位研究.以上研究均表明我国为射频干扰比较严重的地区之一. ...
An RFI index to quantify the contamination of SMOS data by radio-frequency interfence
1
2016
... 在电磁环境方面,Le Vine[24]首先给出了Aquarius主被动微波遥感的全球RFI情况,Soldo等[25]通过定义RFI指数,量化了SMOS数据在全球的污染程度,并且Soldo等[26]还应用SMAP数据在全球范围开展了干扰源定位研究.以上研究均表明我国为射频干扰比较严重的地区之一. ...
Location of radio-frequency interference sources using the SMAP L-band radiometer
1
2018
... 在电磁环境方面,Le Vine[24]首先给出了Aquarius主被动微波遥感的全球RFI情况,Soldo等[25]通过定义RFI指数,量化了SMOS数据在全球的污染程度,并且Soldo等[26]还应用SMAP数据在全球范围开展了干扰源定位研究.以上研究均表明我国为射频干扰比较严重的地区之一. ...
(Microwave remote sensing fundamentals and radiometry)
2
1988
... 被动微波遥感所测量的信号源于目标的热辐射噪声,其本质是物质内部微观粒子的无规律运动[27],该噪声所产生的功率极低,根据理想黑体辐射公式: ...
... 微波辐射计测量的是目标物体的热辐射,其信号表现为具有高斯分布特性的随机噪声.在经过微波辐射计系统后其输出电压的标准差(σV)与均值(mV)之比与微波辐射计的中频带宽(B)与硬件积分时间(τ)有关[27],如式(9): ...
(Microwave remote sensing fundamentals and radiometry)
2
1988
... 被动微波遥感所测量的信号源于目标的热辐射噪声,其本质是物质内部微观粒子的无规律运动[27],该噪声所产生的功率极低,根据理想黑体辐射公式: ...
... 微波辐射计测量的是目标物体的热辐射,其信号表现为具有高斯分布特性的随机噪声.在经过微波辐射计系统后其输出电压的标准差(σV)与均值(mV)之比与微波辐射计的中频带宽(B)与硬件积分时间(τ)有关[27],如式(9): ...
机载噪声耦合式增益自动补偿微波辐射计
1
2007
... 闪电河流域水循环与能量平衡遥感综合试验中的地基L波段微波辐射计由中国科学院东北地理与农业生态研究所自主研制,采用数字增益自动补偿技术消除接收机增益波动引起的测量误差[28-29].该辐射计带宽(B)60 MHz,为配合射频干扰检测,将硬件积分时间(τ)缩小至1 ms,采样频率5 Ksps,前端开关切换周期为0.2 s,分别测量参考源与天线(各0.1 s)[30],仪器探测灵敏度优于2 K.该辐射计在脉冲辐射干扰模拟实验中已经被证明具有一定的射频干扰检测能力[31]. ...
机载噪声耦合式增益自动补偿微波辐射计
1
2007
... 闪电河流域水循环与能量平衡遥感综合试验中的地基L波段微波辐射计由中国科学院东北地理与农业生态研究所自主研制,采用数字增益自动补偿技术消除接收机增益波动引起的测量误差[28-29].该辐射计带宽(B)60 MHz,为配合射频干扰检测,将硬件积分时间(τ)缩小至1 ms,采样频率5 Ksps,前端开关切换周期为0.2 s,分别测量参考源与天线(各0.1 s)[30],仪器探测灵敏度优于2 K.该辐射计在脉冲辐射干扰模拟实验中已经被证明具有一定的射频干扰检测能力[31]. ...
高灵敏度机载L波段微波辐射计探测海表盐度
1
2008
... 闪电河流域水循环与能量平衡遥感综合试验中的地基L波段微波辐射计由中国科学院东北地理与农业生态研究所自主研制,采用数字增益自动补偿技术消除接收机增益波动引起的测量误差[28-29].该辐射计带宽(B)60 MHz,为配合射频干扰检测,将硬件积分时间(τ)缩小至1 ms,采样频率5 Ksps,前端开关切换周期为0.2 s,分别测量参考源与天线(各0.1 s)[30],仪器探测灵敏度优于2 K.该辐射计在脉冲辐射干扰模拟实验中已经被证明具有一定的射频干扰检测能力[31]. ...
高灵敏度机载L波段微波辐射计探测海表盐度
1
2008
... 闪电河流域水循环与能量平衡遥感综合试验中的地基L波段微波辐射计由中国科学院东北地理与农业生态研究所自主研制,采用数字增益自动补偿技术消除接收机增益波动引起的测量误差[28-29].该辐射计带宽(B)60 MHz,为配合射频干扰检测,将硬件积分时间(τ)缩小至1 ms,采样频率5 Ksps,前端开关切换周期为0.2 s,分别测量参考源与天线(各0.1 s)[30],仪器探测灵敏度优于2 K.该辐射计在脉冲辐射干扰模拟实验中已经被证明具有一定的射频干扰检测能力[31]. ...
基于数字增益自动补偿型L波段微波辐射计电磁干扰抑制方法研究
3
2019
... 闪电河流域水循环与能量平衡遥感综合试验中的地基L波段微波辐射计由中国科学院东北地理与农业生态研究所自主研制,采用数字增益自动补偿技术消除接收机增益波动引起的测量误差[28-29].该辐射计带宽(B)60 MHz,为配合射频干扰检测,将硬件积分时间(τ)缩小至1 ms,采样频率5 Ksps,前端开关切换周期为0.2 s,分别测量参考源与天线(各0.1 s)[30],仪器探测灵敏度优于2 K.该辐射计在脉冲辐射干扰模拟实验中已经被证明具有一定的射频干扰检测能力[31]. ...
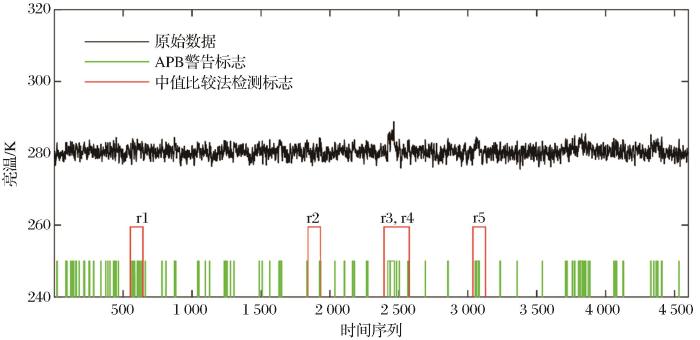
... 实验中用标识kc来表示这个比值的1 000倍,则本实验所用辐射计的kc值应为4.082 5,但实际测量时该值受硬件电路的影响会有所偏离,而且测量目标不同也会引起该值的变化.在地基微波辐射计观测实验中,kc一般分布在2~9之间.文献[30]提出了一种基于变异系数CV中值的滤波方法—中值比较法.实验采用该方法进行射频干扰检测,帧容量设置为92,分别计算各帧的电压平均值、标准差以及变异系数,组容量设置为25,统计出一组内变异系数的最小值Mi和中值Me,检测阈值定义为δm=2*Me-Mi,对变异系数超过δm的数据帧标记为射频干扰. ...
... 为了能够有效检测小量级干扰,APB算法的检测阈值与检测均值相差不会太大,一般为2~3 K左右[30],这会在一定程度上造成误检,即APB算法可能会将测量目标短时间内的正常波动检测为射频干扰,并有可能使得警告率高于中值比较算法的检测率,因为中值比较算法对这种波动具有较强的容许性.图11为F4点裸土观测V极化40 K测量数据,在该角度的检测中,中值比较算法的检测率为5%,而APB算法的检测率为6.87%(警告率为12%),图中可见,APB算法存在一定的误检现象,当然该算法对检测到干扰的相邻数据直接标记也是警告率偏高的一个原因. ...
基于数字增益自动补偿型L波段微波辐射计电磁干扰抑制方法研究
3
2019
... 闪电河流域水循环与能量平衡遥感综合试验中的地基L波段微波辐射计由中国科学院东北地理与农业生态研究所自主研制,采用数字增益自动补偿技术消除接收机增益波动引起的测量误差[28-29].该辐射计带宽(B)60 MHz,为配合射频干扰检测,将硬件积分时间(τ)缩小至1 ms,采样频率5 Ksps,前端开关切换周期为0.2 s,分别测量参考源与天线(各0.1 s)[30],仪器探测灵敏度优于2 K.该辐射计在脉冲辐射干扰模拟实验中已经被证明具有一定的射频干扰检测能力[31]. ...
... 实验中用标识kc来表示这个比值的1 000倍,则本实验所用辐射计的kc值应为4.082 5,但实际测量时该值受硬件电路的影响会有所偏离,而且测量目标不同也会引起该值的变化.在地基微波辐射计观测实验中,kc一般分布在2~9之间.文献[30]提出了一种基于变异系数CV中值的滤波方法—中值比较法.实验采用该方法进行射频干扰检测,帧容量设置为92,分别计算各帧的电压平均值、标准差以及变异系数,组容量设置为25,统计出一组内变异系数的最小值Mi和中值Me,检测阈值定义为δm=2*Me-Mi,对变异系数超过δm的数据帧标记为射频干扰. ...
... 为了能够有效检测小量级干扰,APB算法的检测阈值与检测均值相差不会太大,一般为2~3 K左右[30],这会在一定程度上造成误检,即APB算法可能会将测量目标短时间内的正常波动检测为射频干扰,并有可能使得警告率高于中值比较算法的检测率,因为中值比较算法对这种波动具有较强的容许性.图11为F4点裸土观测V极化40 K测量数据,在该角度的检测中,中值比较算法的检测率为5%,而APB算法的检测率为6.87%(警告率为12%),图中可见,APB算法存在一定的误检现象,当然该算法对检测到干扰的相邻数据直接标记也是警告率偏高的一个原因. ...
L波段微波辐射计周期脉冲式干扰时域检测方法研究
2
2018
... 闪电河流域水循环与能量平衡遥感综合试验中的地基L波段微波辐射计由中国科学院东北地理与农业生态研究所自主研制,采用数字增益自动补偿技术消除接收机增益波动引起的测量误差[28-29].该辐射计带宽(B)60 MHz,为配合射频干扰检测,将硬件积分时间(τ)缩小至1 ms,采样频率5 Ksps,前端开关切换周期为0.2 s,分别测量参考源与天线(各0.1 s)[30],仪器探测灵敏度优于2 K.该辐射计在脉冲辐射干扰模拟实验中已经被证明具有一定的射频干扰检测能力[31]. ...
... 对应的σ和m分别是测量亮温的标准差和均值,β参数决定着算法的灵敏度.Niamsuwan对算法中的各参数给出了详细的说明及计算方法[16].由于辐射计接收机中存在硬件积分电路,所以文献[31]对该算法进行了一些改进,主要体现在以下方面. ...
L波段微波辐射计周期脉冲式干扰时域检测方法研究
2
2018
... 闪电河流域水循环与能量平衡遥感综合试验中的地基L波段微波辐射计由中国科学院东北地理与农业生态研究所自主研制,采用数字增益自动补偿技术消除接收机增益波动引起的测量误差[28-29].该辐射计带宽(B)60 MHz,为配合射频干扰检测,将硬件积分时间(τ)缩小至1 ms,采样频率5 Ksps,前端开关切换周期为0.2 s,分别测量参考源与天线(各0.1 s)[30],仪器探测灵敏度优于2 K.该辐射计在脉冲辐射干扰模拟实验中已经被证明具有一定的射频干扰检测能力[31]. ...
... 对应的σ和m分别是测量亮温的标准差和均值,β参数决定着算法的灵敏度.Niamsuwan对算法中的各参数给出了详细的说明及计算方法[16].由于辐射计接收机中存在硬件积分电路,所以文献[31]对该算法进行了一些改进,主要体现在以下方面. ...
Mitigation of terrestrial radar interference in L-band spaceborne microwave radiometers
1
2006
... 在理论上,射频干扰对微波辐射计的探测影响可以应用Friis传输方程来描述[32]: ...









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}