输电通道机载激光点云多级配准研究
杜伟 , 1 , 刘洋 2 , 杨国柱 1 , 王和平 1 , 李致东 1 , 李俊磊 1 , 习晓环 , 2
1.国网通用航空有限公司,北京 102209
2.中国科学院空天信息创新研究院 数字地球重点实验室,北京 100094
A Multi-level Registration Method of Transmission Corridor from Airborne LiDAR Point Cloud
Du Wei , 1 , Liu Yang 2 , Yang Guozhu 1 , Wang Heping 1 , Li Zhidong 1 , Li Junlei 1 , Xi Xiaohuan , 2
1.National Grid General Aviation Company Limited,Beijing 102209,China
2.Key Laboratory of Digital Earth,Aerospace Information Research Institute,Chinese Academy of Sciences,Beijing 100094,China
通讯作者: 习晓环(1972-),女,陕西乾县人,副研究员,主要从事激光雷达遥感研究。E⁃mail: xixh@radi.ac.cn
收稿日期: 2020-06-24
修回日期: 2021-09-13
基金资助:
国网通用航空有限公司科技项目 . 2400/2019⁃44003B
Received: 2020-06-24
Revised: 2021-09-13
作者简介 About authors
杜伟(1982-),男,山东临沂人,高级工程师,主要从事输电线路运输、建设技术与管理、航空电力作业技术与管理研究E⁃mail:532779775@qq.com
, E-mail:532779775@qq.com
摘要
机载LiDAR在输电通道变化检测应用中的关键是多时相点云的高效高精度配准,实验将PCA主轴变换与改进ICP算法相结合提出一种多级配准方法。首先基于输电通道杆塔不易形变的特点,采用PCA算法计算对应杆塔点云的3个主轴向量,通过校正主轴方向得到两组杆塔点云的粗略位姿变换关系,然后利用改进搜索和收敛策略的ICP方法实现精配准,最后将变换参数应用于全局完成多期点云的精配准。实验表明,该方法在效率和精度方面都得到较大提升,配准前后的平均点位误差可以减小约94%。
关键词:
机载激光雷达 多级配准 杆塔点云 主轴向量 输电通道
Abstract
Time series point clouds registration of transmission corridor area is an important task and problem in airborne LiDAR inspection application. This paper presents a multi-level registration method combining PCA transformation and improved ICP algorithm according to the key elements of transmission corridor. It is based on the characteristics that the power towers are not easy to deform. Firstly, PCA algorithm is used to calculate the three principle axis vectors of the corresponding power tower point cloud. By correcting the direction of the main axis, the approximate pose transformation of two power towers point clouds can be obtained. After the coarse registration, the ICP method with improved search and convergence strategies is used to achieve fine registration. Finally, the transformation parameters are applied to the total registration to achieve fast and accurate registration of the transmission corridor point cloud. The experiment shows that the processing efficiency is improved and the average point-to-point spacing distance is reduced by more than 94% after registration, which meets the demands of subsequent applications and has practical application significance.
Keywords:
Airborne LiDAR Multi-level registration Power tower point cloud Main axis vector Transmission corridor
本文引用格式
杜伟, 刘洋, 杨国柱, 王和平, 李致东, 李俊磊, 习晓环. 输电通道机载激光点云多级配准研究 . 遥感技术与应用 [J], 2021, 36(6): 1294-1298 doi:10.11873/j.issn.1004-0323.2021.6.1294
Du Wei, Liu Yang, Yang Guozhu, Wang Heping, Li Zhidong, Li Junlei, Xi Xiaohuan. A Multi-level Registration Method of Transmission Corridor from Airborne LiDAR Point Cloud . Remote Sensing Technology and Application
1 引 言
机载激光雷达技术(Light Detection And Ranging, LiDAR)可以直接获取输电通道高密度、高精度的三维空间数据,为输电线路数字化管理和安全巡检新的技术手段[1 -2 ] 。对不同时期获取的海量三维数据进行变化检测可以及时发现线路主要地物的动态变化,为电力巡检和安全预警提供基础数据支持。
遥感变化检测的关键是多期数据的高精度配准,特别是对于输电通道机载LiDAR点云数据,由于线路距离长、跨越的地形复杂,LiDAR系统获取的离散点云往往数以千亿,高效、高精度的数据处理和配准对于线路变化检测尤为重要[3 ] 。目前点云配准方法有基于点的配准和基于特征的配准。前者直接对点云操作,确定点集间的对应关系,可称作无特征的配准算法,常见的如ICP算法精度高,但存在计算效率和鲁棒性方面的问题[4 ] ,为此很多学者提出了改进的ICP算法。Li等[5 ] 基于体素化方法进行三维网格构建,以体素关系替代点对关系,提高了算法的稳健性。基于特征的配准通过选取点集中的关键基元,如几何特征来求解变换参数。根据基元的不同,特征又分为点、线和面特征。基于点特征主要是提取对象的关键点(如角点、拐点等)和特征描述子,通过相似度估计对特征点对进行筛选。借鉴计算机视觉中常用的SIFT描述子,Nakamura和Wakita[6 ] 提出了同余变换不变特征(Congruence transformation Invariant Feature, CIF)的全局匹配算法,Ma和Liu[7 ] 采用快速点特征直方图(Fast Point Feature Histograms, FPFH)方法计算邻域特征实现特征相似度匹配,不足之处在于搜索邻域和提取多维特征计算开销大,处理大数据量时效率低。在结构化场景如有建筑物的情况,线状特征可以大大提高配准效率。Yuan等[8 ] 利用分权最小二乘拟合模糊聚类算法分割点云,然后选择符合线性分布的特征计算旋转参数,继而得到平移参数。王永波等[9 ] 将同名线状特征中的Plücker直线坐标作为约束条件,对目标函数极值化求得配准参数,减少了算法迭代对参数初值的依赖。城市环境中的平面特征或曲面特征较多,据此进行配准并与对应的平面上的特征点建立关系,即可取得较好的匹配效果[10 ] 。
相对来说,输电通道跨度大、地物类型复杂,其机载LiDAR点云配准的难点在于:一次工程获取的点云数据量大,电力线、电塔和线下植被等地物点密度差异大;地物多为茂密植被,具有明显特征的地物相对较少;地物类型复杂,单一配准算法普适性不强。据此本研究顾及通道关键地物要素特点,提出一种结合PCA主轴变换和改进ICP精配准的多级配准方法,并利用实例验证方法的效率和精度。
2 研究方法
2.1 点云配准原理
点云配准即通过一定的匹配方法建立同名点或同名特征间的对应关系和配准模型,将不同时期获取的点集投影到统一的坐标系中。配准模型通常可分为刚体和非刚体模型[11 ] ,实际环境和应用中一般不考虑局部扭曲等形变,认为仅存在平移、旋转和缩放的关系,因此点云配准即构建配准数据集间的刚体变换矩阵。
2.2 多级配准策略
在输电通道环境中,主要地物为植被、电力线、杆塔等,相对来说一定时期内杆塔的变化较小,因此以杆塔点云为出发点,先采用主成分分析方法(Principal Component Analysis, PCA)提取其点集的特征向量主轴,建立3个主轴的一一对应关系完成粗配准;然后将粗配准获取的变换参数作为初值,利用改进的ICP算法进行迭代,求解最优的配准参数;最后将参数代入全局点云数据,实现多时相数据坐标的统一,算法流程如图1 所示。
图1
图1
输电通道机载LiDAR点云多级配准流程
Fig.1
Multi-level registration method of transmission corridor from airborne LiDAR point cloud
2.2.1 基于PCA主轴变换的粗配准
PCA在光学影像处理中应用较多,对三维点云数据进行PCA主轴变化既可以减少数据集的维数、保持数据集对方差贡献最大的特征,其特征矢量具有旋转不变性,而且算法的稳定性好[12 ] 。3个特征向量表示为点云的3个主方向,建立以点云质心为原点、3个主方向为坐标轴的参考坐标系。
矩阵分解方法较多,其中奇异值分解(Singular Value Decomposition, SVD)可得到稳定且唯一的特征,在点云配准、信号处理等方面得到广泛应用[13 ] 。利用点云自身的协方差矩阵X c o v 式(1):
X c o v = P k × 3 - I k × 1 O P T ( P k × 3 - I k × 1 O P ) (1)
其中:P k × 3 I k × 1 O P 式(1)进一步使用SVD算法进行分解可得正交矩阵U V S 式(2)表示为:
X c o v = U S V T (2)
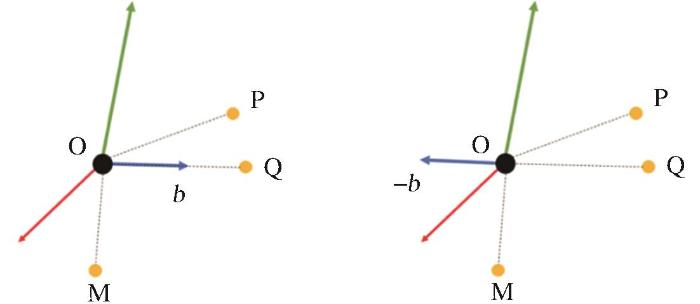
式(2)中U 图2 蓝色箭头为反向)。实际应用中可以通过查找点集中距离质心最远的点和质心的向量、主轴向量的两个方向余弦之积来判断是否存在反向,如果余弦之积小于0,则代表反向(如图中P、Q两点)。
图2
图2
反向示例
Fig.2
Schematic diagram of reverse corresponding principal axis
通过PCA分析处理后,即可获得杆塔在源点云和目标点云的正交方向向量,进而得到初始变换矩阵,即基于SVD法得到旋转矩阵R T
(2) 对H = U S V T R = U V T
(3) 利用R Q P Q 0 P 0 T = P 0 - R * Q 0
(4) 得到初始变换矩阵M 0 = R T 0 1 0
2.2.2 基于改进ICP的精配准
初始配准后两个点集中的杆塔点云大致重叠,但也会存在一定的偏移,本文针对算法收敛较慢或无法收敛、效率较低的问题,从两个方面进行优化:
(1) 误差准则:针对经典ICP算法的欧氏距离度量准则易引起误差累积的问题,提出利用法线估计和点到面的距离的误差准则。
(2) 点对搜索:针对ICP算法点对遍历搜索耗时的问题,采用K-d树快速搜索并利用距离阈值剔除错误点对,提高算法效率和精度。
① 利用PCA主轴变换得初始变换矩阵M 0 M = M 0
② 根据变换矩阵M Q Q ' Q ' P
③ 基于邻域点集构建协方差矩阵并估算法向量,并基于点集质心求点到面的距离d
④ 根据设置的距离阈值d T H Q ' P M
⑤ 重复②~④,直到满足迭代的终止条件,循环结束,得到最终的M
3 实验结果与分析
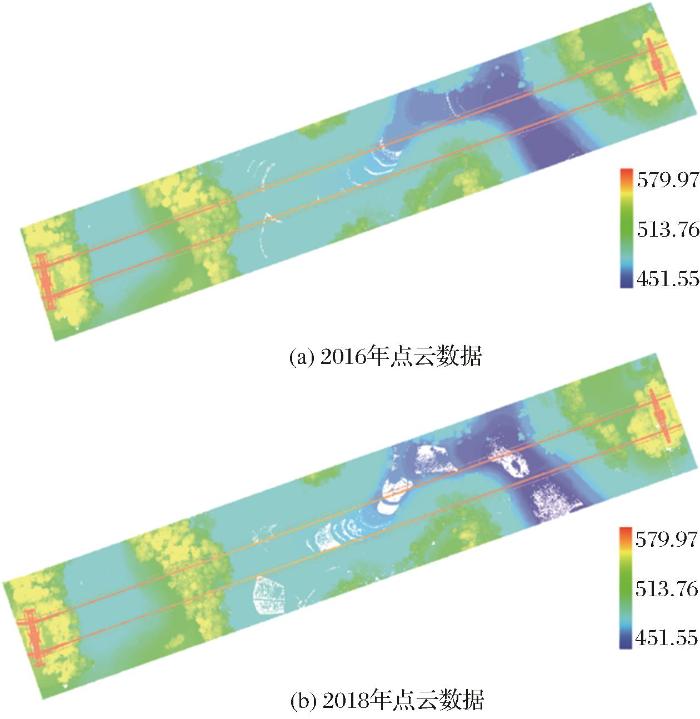
实验数据为复奉线800 kV输电通道机载点云数据,分别于2016年和2018年由无人机搭载Riegl VUX-1LR系统采集。选取其中一档长为500 m的数据,俯视图分别如图3 (a)和图3 (b),以2018年的数据为参考,2016年的作为待配准数据,高程单位为m。
图3
图3
两期实验数据俯视图(按高程显示,单位:m)
Fig.3
Top view of experimental data in two phases
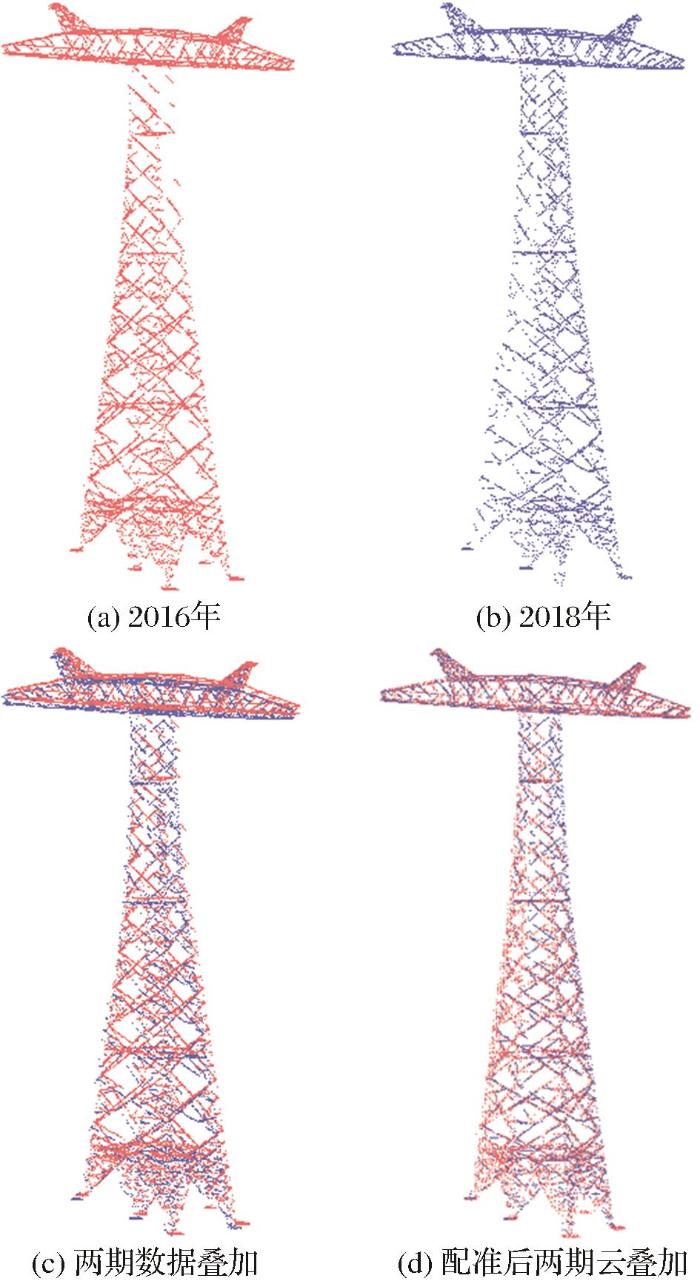
首先对两期数据利用中科院空天信息创新研究院开发的点云魔方(Point Cloud Magic, PCM 2.0)软件进行去噪和滤波,进而从非地面点云中提取精确的杆塔点云,图4 (a)和图4 (b)分别为2016年(红色)和2018年的杆塔点云正视图(蓝色),图4 (c)是两期杆塔点云叠加显示效果图。可以看出,两期杆塔点云并不完全重合,需要进一步的精配准处理。
图4
图4
配准前后正视图
Fig.4
Front view of power tower and registrated points cloud
粗配准阶段PCA算法无需设置参数,依据多次试验ICP精配准的参数可设置为:迭代次数为100,RMS为1.0e-5 m,参与匹配过程的点云数量为17 498,配准算法运行时间约3.0 s,结果如图4 (d)所示。通过匹配后点对的点位精度D来检验精度。配准后,平均点位距约为5 cm,相对于配准前的平均点位距误差0.8 m,误差减少了约94%。
4 结 语
机载LiDAR已经成为当前输电线路数字化管理、业务巡检和安全预警分析的重要支撑,对获取的大量离散点云进行快速变化检测始终是应用的难点。考虑到输电通道杆塔相对形变小的特点提出点云多级配准方法,用实例验证和分析了方法的有效性和精度。
在应用中可根据具体线路特点选择更多的配准基元,如使用更多的输电通道局部不变信息作为模型的输入,提高点云配准算法的自动化和普适性。
参考文献
View Option
[1]
Peng S W Xi X H Wang C et al Systematic comparison of power corridor classification methods from ALS Point Cloud
[J].Remote Sensing ,2019 ,11 :1961 .DOI:10.3390/rs11171961 .
[本文引用: 1]
[2]
Wang Jun Xia Shaobo Wang Heping et al Study on reconstruction of bundled conductors from helicoper-borne LiDAR data
[J]. Remote Sensing and Technology , 2015 , 30 (6 ): 1189 -1194 .
[本文引用: 1]
汪骏 , 夏少波 , 王和平 , 等 基于直升机激光点云的分裂导线重建研究
[J]. 遥感技术与应用 , 2015 , 30 (6 ): 1189 -1194 .
[本文引用: 1]
[3]
Wu Di Shi Wenzhong Gao Lipeng et al An improved method for object extracting based on context information using multi-source data
[J]. Remote Sensing and Technology , 2018 , 33 (1 ):128 -135 .
[本文引用: 1]
吴迪 , 史文中 , 高利鹏 , 等 一种改进的基于上下文信息的多源数据融合目标提取方法
[J]. 遥感技术与应用 , 2018 , 33 (1 ): 128 -135 .
[本文引用: 1]
[4]
Yang R Meng X Yao Y et al An analytical approach for evaluating point cloud registration-error utilizing targets
[J]. ISPRS Journal of Photogrammetry Remote Sensing , 2018 , 143 (5 ): 48 -56 .
[本文引用: 1]
[5]
Li M Li G Wang L et al Planar feature extraction from unorganized point clouds using octree voxel-based region growing
[J].Optics and Precision Engineering ,2018 ,26 (1 ):172 -183 .
[本文引用: 1]
[6]
Nakamura T Wakita S Robust Global scan mmatching method using congruence ttransformation invariant feature descriptors and a geometric constraint between key points
[J]. Transactions of the Society of Instrument & Control Engineers , 2015 , 51 (5 ): 309 -318 .
[本文引用: 1]
[7]
Ma D Liu G Improved method of point cloud registration based on FPFH feature
[J]. Computer and Modernization , 2017 , 11 : 46 -50 .
[本文引用: 1]
[8]
Yuan X Zhao C Tang Z et al Feature-based laser scan matching and its application for indoor mapping
[J]. Sensors , 2016 , 16 (8 ): 1265 -1286 .
[本文引用: 1]
[9]
Wang Yongbo Wang Yunjia She Wenwen et al A linear features-constrained,plücker coordinates-based, closed-form registration approach to terrestrial LiDAR point clouds
[J]. Geomatics and Information Science of Wuhan University , 2018 , 43 (9 ): 1376 -1384 .
[本文引用: 1]
王永波 , 汪云甲 , 佘雯雯 , 等 直线特征约束下利用Plücker坐标描述的LiDAR点云无初值配准方法
[J]. 武汉大学学报(信息科学版) , 2018 , 43 (9 ): 1376 -1384 .
[本文引用: 1]
[10]
Serafin J Olson E Grisetti G Fast and robust 3D feature extraction from sparse point clouds
[C]∥ IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , Daejeon, South Korea , 9 -14 October 2016 : 4105 -4112 .
[本文引用: 1]
[11]
Han J Yin P He Y et al Enhanced ICP for the registration of Large-scale 3D environment models: an experimental study
[J]. Sensors , 2016 ,16 (2 ):228 . DOI:10.3390/s16020228 .
[本文引用: 1]
[12]
Wang Yujian Wu Mingming Gao Qian 3 D Point cloud registration algorithm based on locality preserving PCA
[J]. Optical Technique ,2018,44 (5 ):562 -568 .
[本文引用: 1]
王育坚 ,吴明明 ,高倩 基于保局PCA的三维点云配准算法
[J]. 光学技术 ,2018 ,44 (5 ):562 -568 .
[本文引用: 1]
[13]
Oomori S Nishida T Kurogi S Point cloud matching using singular value decomposition
[J]. Artificial Life and Robotics , 2016 , 21 (2 ): 149 -154 .
[本文引用: 1]
Systematic comparison of power corridor classification methods from ALS Point Cloud
1
2019
... 机载激光雷达技术(Light Detection And Ranging, LiDAR)可以直接获取输电通道高密度、高精度的三维空间数据,为输电线路数字化管理和安全巡检新的技术手段[1 -2 ] .对不同时期获取的海量三维数据进行变化检测可以及时发现线路主要地物的动态变化,为电力巡检和安全预警提供基础数据支持. ...
基于直升机激光点云的分裂导线重建研究
1
2015
... 机载激光雷达技术(Light Detection And Ranging, LiDAR)可以直接获取输电通道高密度、高精度的三维空间数据,为输电线路数字化管理和安全巡检新的技术手段[1 -2 ] .对不同时期获取的海量三维数据进行变化检测可以及时发现线路主要地物的动态变化,为电力巡检和安全预警提供基础数据支持. ...
基于直升机激光点云的分裂导线重建研究
1
2015
... 机载激光雷达技术(Light Detection And Ranging, LiDAR)可以直接获取输电通道高密度、高精度的三维空间数据,为输电线路数字化管理和安全巡检新的技术手段[1 -2 ] .对不同时期获取的海量三维数据进行变化检测可以及时发现线路主要地物的动态变化,为电力巡检和安全预警提供基础数据支持. ...
一种改进的基于上下文信息的多源数据融合目标提取方法
1
2018
... 遥感变化检测的关键是多期数据的高精度配准,特别是对于输电通道机载LiDAR点云数据,由于线路距离长、跨越的地形复杂,LiDAR系统获取的离散点云往往数以千亿,高效、高精度的数据处理和配准对于线路变化检测尤为重要[3 ] .目前点云配准方法有基于点的配准和基于特征的配准.前者直接对点云操作,确定点集间的对应关系,可称作无特征的配准算法,常见的如ICP算法精度高,但存在计算效率和鲁棒性方面的问题[4 ] ,为此很多学者提出了改进的ICP算法.Li等[5 ] 基于体素化方法进行三维网格构建,以体素关系替代点对关系,提高了算法的稳健性.基于特征的配准通过选取点集中的关键基元,如几何特征来求解变换参数.根据基元的不同,特征又分为点、线和面特征.基于点特征主要是提取对象的关键点(如角点、拐点等)和特征描述子,通过相似度估计对特征点对进行筛选.借鉴计算机视觉中常用的SIFT描述子,Nakamura和Wakita[6 ] 提出了同余变换不变特征(Congruence transformation Invariant Feature, CIF)的全局匹配算法,Ma和Liu[7 ] 采用快速点特征直方图(Fast Point Feature Histograms, FPFH)方法计算邻域特征实现特征相似度匹配,不足之处在于搜索邻域和提取多维特征计算开销大,处理大数据量时效率低.在结构化场景如有建筑物的情况,线状特征可以大大提高配准效率.Yuan等[8 ] 利用分权最小二乘拟合模糊聚类算法分割点云,然后选择符合线性分布的特征计算旋转参数,继而得到平移参数.王永波等[9 ] 将同名线状特征中的Plücker直线坐标作为约束条件,对目标函数极值化求得配准参数,减少了算法迭代对参数初值的依赖.城市环境中的平面特征或曲面特征较多,据此进行配准并与对应的平面上的特征点建立关系,即可取得较好的匹配效果[10 ] . ...
一种改进的基于上下文信息的多源数据融合目标提取方法
1
2018
... 遥感变化检测的关键是多期数据的高精度配准,特别是对于输电通道机载LiDAR点云数据,由于线路距离长、跨越的地形复杂,LiDAR系统获取的离散点云往往数以千亿,高效、高精度的数据处理和配准对于线路变化检测尤为重要[3 ] .目前点云配准方法有基于点的配准和基于特征的配准.前者直接对点云操作,确定点集间的对应关系,可称作无特征的配准算法,常见的如ICP算法精度高,但存在计算效率和鲁棒性方面的问题[4 ] ,为此很多学者提出了改进的ICP算法.Li等[5 ] 基于体素化方法进行三维网格构建,以体素关系替代点对关系,提高了算法的稳健性.基于特征的配准通过选取点集中的关键基元,如几何特征来求解变换参数.根据基元的不同,特征又分为点、线和面特征.基于点特征主要是提取对象的关键点(如角点、拐点等)和特征描述子,通过相似度估计对特征点对进行筛选.借鉴计算机视觉中常用的SIFT描述子,Nakamura和Wakita[6 ] 提出了同余变换不变特征(Congruence transformation Invariant Feature, CIF)的全局匹配算法,Ma和Liu[7 ] 采用快速点特征直方图(Fast Point Feature Histograms, FPFH)方法计算邻域特征实现特征相似度匹配,不足之处在于搜索邻域和提取多维特征计算开销大,处理大数据量时效率低.在结构化场景如有建筑物的情况,线状特征可以大大提高配准效率.Yuan等[8 ] 利用分权最小二乘拟合模糊聚类算法分割点云,然后选择符合线性分布的特征计算旋转参数,继而得到平移参数.王永波等[9 ] 将同名线状特征中的Plücker直线坐标作为约束条件,对目标函数极值化求得配准参数,减少了算法迭代对参数初值的依赖.城市环境中的平面特征或曲面特征较多,据此进行配准并与对应的平面上的特征点建立关系,即可取得较好的匹配效果[10 ] . ...
An analytical approach for evaluating point cloud registration-error utilizing targets
1
2018
... 遥感变化检测的关键是多期数据的高精度配准,特别是对于输电通道机载LiDAR点云数据,由于线路距离长、跨越的地形复杂,LiDAR系统获取的离散点云往往数以千亿,高效、高精度的数据处理和配准对于线路变化检测尤为重要[3 ] .目前点云配准方法有基于点的配准和基于特征的配准.前者直接对点云操作,确定点集间的对应关系,可称作无特征的配准算法,常见的如ICP算法精度高,但存在计算效率和鲁棒性方面的问题[4 ] ,为此很多学者提出了改进的ICP算法.Li等[5 ] 基于体素化方法进行三维网格构建,以体素关系替代点对关系,提高了算法的稳健性.基于特征的配准通过选取点集中的关键基元,如几何特征来求解变换参数.根据基元的不同,特征又分为点、线和面特征.基于点特征主要是提取对象的关键点(如角点、拐点等)和特征描述子,通过相似度估计对特征点对进行筛选.借鉴计算机视觉中常用的SIFT描述子,Nakamura和Wakita[6 ] 提出了同余变换不变特征(Congruence transformation Invariant Feature, CIF)的全局匹配算法,Ma和Liu[7 ] 采用快速点特征直方图(Fast Point Feature Histograms, FPFH)方法计算邻域特征实现特征相似度匹配,不足之处在于搜索邻域和提取多维特征计算开销大,处理大数据量时效率低.在结构化场景如有建筑物的情况,线状特征可以大大提高配准效率.Yuan等[8 ] 利用分权最小二乘拟合模糊聚类算法分割点云,然后选择符合线性分布的特征计算旋转参数,继而得到平移参数.王永波等[9 ] 将同名线状特征中的Plücker直线坐标作为约束条件,对目标函数极值化求得配准参数,减少了算法迭代对参数初值的依赖.城市环境中的平面特征或曲面特征较多,据此进行配准并与对应的平面上的特征点建立关系,即可取得较好的匹配效果[10 ] . ...
Planar feature extraction from unorganized point clouds using octree voxel-based region growing
1
2018
... 遥感变化检测的关键是多期数据的高精度配准,特别是对于输电通道机载LiDAR点云数据,由于线路距离长、跨越的地形复杂,LiDAR系统获取的离散点云往往数以千亿,高效、高精度的数据处理和配准对于线路变化检测尤为重要[3 ] .目前点云配准方法有基于点的配准和基于特征的配准.前者直接对点云操作,确定点集间的对应关系,可称作无特征的配准算法,常见的如ICP算法精度高,但存在计算效率和鲁棒性方面的问题[4 ] ,为此很多学者提出了改进的ICP算法.Li等[5 ] 基于体素化方法进行三维网格构建,以体素关系替代点对关系,提高了算法的稳健性.基于特征的配准通过选取点集中的关键基元,如几何特征来求解变换参数.根据基元的不同,特征又分为点、线和面特征.基于点特征主要是提取对象的关键点(如角点、拐点等)和特征描述子,通过相似度估计对特征点对进行筛选.借鉴计算机视觉中常用的SIFT描述子,Nakamura和Wakita[6 ] 提出了同余变换不变特征(Congruence transformation Invariant Feature, CIF)的全局匹配算法,Ma和Liu[7 ] 采用快速点特征直方图(Fast Point Feature Histograms, FPFH)方法计算邻域特征实现特征相似度匹配,不足之处在于搜索邻域和提取多维特征计算开销大,处理大数据量时效率低.在结构化场景如有建筑物的情况,线状特征可以大大提高配准效率.Yuan等[8 ] 利用分权最小二乘拟合模糊聚类算法分割点云,然后选择符合线性分布的特征计算旋转参数,继而得到平移参数.王永波等[9 ] 将同名线状特征中的Plücker直线坐标作为约束条件,对目标函数极值化求得配准参数,减少了算法迭代对参数初值的依赖.城市环境中的平面特征或曲面特征较多,据此进行配准并与对应的平面上的特征点建立关系,即可取得较好的匹配效果[10 ] . ...
Robust Global scan mmatching method using congruence ttransformation invariant feature descriptors and a geometric constraint between key points
1
2015
... 遥感变化检测的关键是多期数据的高精度配准,特别是对于输电通道机载LiDAR点云数据,由于线路距离长、跨越的地形复杂,LiDAR系统获取的离散点云往往数以千亿,高效、高精度的数据处理和配准对于线路变化检测尤为重要[3 ] .目前点云配准方法有基于点的配准和基于特征的配准.前者直接对点云操作,确定点集间的对应关系,可称作无特征的配准算法,常见的如ICP算法精度高,但存在计算效率和鲁棒性方面的问题[4 ] ,为此很多学者提出了改进的ICP算法.Li等[5 ] 基于体素化方法进行三维网格构建,以体素关系替代点对关系,提高了算法的稳健性.基于特征的配准通过选取点集中的关键基元,如几何特征来求解变换参数.根据基元的不同,特征又分为点、线和面特征.基于点特征主要是提取对象的关键点(如角点、拐点等)和特征描述子,通过相似度估计对特征点对进行筛选.借鉴计算机视觉中常用的SIFT描述子,Nakamura和Wakita[6 ] 提出了同余变换不变特征(Congruence transformation Invariant Feature, CIF)的全局匹配算法,Ma和Liu[7 ] 采用快速点特征直方图(Fast Point Feature Histograms, FPFH)方法计算邻域特征实现特征相似度匹配,不足之处在于搜索邻域和提取多维特征计算开销大,处理大数据量时效率低.在结构化场景如有建筑物的情况,线状特征可以大大提高配准效率.Yuan等[8 ] 利用分权最小二乘拟合模糊聚类算法分割点云,然后选择符合线性分布的特征计算旋转参数,继而得到平移参数.王永波等[9 ] 将同名线状特征中的Plücker直线坐标作为约束条件,对目标函数极值化求得配准参数,减少了算法迭代对参数初值的依赖.城市环境中的平面特征或曲面特征较多,据此进行配准并与对应的平面上的特征点建立关系,即可取得较好的匹配效果[10 ] . ...
Improved method of point cloud registration based on FPFH feature
1
2017
... 遥感变化检测的关键是多期数据的高精度配准,特别是对于输电通道机载LiDAR点云数据,由于线路距离长、跨越的地形复杂,LiDAR系统获取的离散点云往往数以千亿,高效、高精度的数据处理和配准对于线路变化检测尤为重要[3 ] .目前点云配准方法有基于点的配准和基于特征的配准.前者直接对点云操作,确定点集间的对应关系,可称作无特征的配准算法,常见的如ICP算法精度高,但存在计算效率和鲁棒性方面的问题[4 ] ,为此很多学者提出了改进的ICP算法.Li等[5 ] 基于体素化方法进行三维网格构建,以体素关系替代点对关系,提高了算法的稳健性.基于特征的配准通过选取点集中的关键基元,如几何特征来求解变换参数.根据基元的不同,特征又分为点、线和面特征.基于点特征主要是提取对象的关键点(如角点、拐点等)和特征描述子,通过相似度估计对特征点对进行筛选.借鉴计算机视觉中常用的SIFT描述子,Nakamura和Wakita[6 ] 提出了同余变换不变特征(Congruence transformation Invariant Feature, CIF)的全局匹配算法,Ma和Liu[7 ] 采用快速点特征直方图(Fast Point Feature Histograms, FPFH)方法计算邻域特征实现特征相似度匹配,不足之处在于搜索邻域和提取多维特征计算开销大,处理大数据量时效率低.在结构化场景如有建筑物的情况,线状特征可以大大提高配准效率.Yuan等[8 ] 利用分权最小二乘拟合模糊聚类算法分割点云,然后选择符合线性分布的特征计算旋转参数,继而得到平移参数.王永波等[9 ] 将同名线状特征中的Plücker直线坐标作为约束条件,对目标函数极值化求得配准参数,减少了算法迭代对参数初值的依赖.城市环境中的平面特征或曲面特征较多,据此进行配准并与对应的平面上的特征点建立关系,即可取得较好的匹配效果[10 ] . ...
Feature-based laser scan matching and its application for indoor mapping
1
2016
... 遥感变化检测的关键是多期数据的高精度配准,特别是对于输电通道机载LiDAR点云数据,由于线路距离长、跨越的地形复杂,LiDAR系统获取的离散点云往往数以千亿,高效、高精度的数据处理和配准对于线路变化检测尤为重要[3 ] .目前点云配准方法有基于点的配准和基于特征的配准.前者直接对点云操作,确定点集间的对应关系,可称作无特征的配准算法,常见的如ICP算法精度高,但存在计算效率和鲁棒性方面的问题[4 ] ,为此很多学者提出了改进的ICP算法.Li等[5 ] 基于体素化方法进行三维网格构建,以体素关系替代点对关系,提高了算法的稳健性.基于特征的配准通过选取点集中的关键基元,如几何特征来求解变换参数.根据基元的不同,特征又分为点、线和面特征.基于点特征主要是提取对象的关键点(如角点、拐点等)和特征描述子,通过相似度估计对特征点对进行筛选.借鉴计算机视觉中常用的SIFT描述子,Nakamura和Wakita[6 ] 提出了同余变换不变特征(Congruence transformation Invariant Feature, CIF)的全局匹配算法,Ma和Liu[7 ] 采用快速点特征直方图(Fast Point Feature Histograms, FPFH)方法计算邻域特征实现特征相似度匹配,不足之处在于搜索邻域和提取多维特征计算开销大,处理大数据量时效率低.在结构化场景如有建筑物的情况,线状特征可以大大提高配准效率.Yuan等[8 ] 利用分权最小二乘拟合模糊聚类算法分割点云,然后选择符合线性分布的特征计算旋转参数,继而得到平移参数.王永波等[9 ] 将同名线状特征中的Plücker直线坐标作为约束条件,对目标函数极值化求得配准参数,减少了算法迭代对参数初值的依赖.城市环境中的平面特征或曲面特征较多,据此进行配准并与对应的平面上的特征点建立关系,即可取得较好的匹配效果[10 ] . ...
直线特征约束下利用Plücker坐标描述的LiDAR点云无初值配准方法
1
2018
... 遥感变化检测的关键是多期数据的高精度配准,特别是对于输电通道机载LiDAR点云数据,由于线路距离长、跨越的地形复杂,LiDAR系统获取的离散点云往往数以千亿,高效、高精度的数据处理和配准对于线路变化检测尤为重要[3 ] .目前点云配准方法有基于点的配准和基于特征的配准.前者直接对点云操作,确定点集间的对应关系,可称作无特征的配准算法,常见的如ICP算法精度高,但存在计算效率和鲁棒性方面的问题[4 ] ,为此很多学者提出了改进的ICP算法.Li等[5 ] 基于体素化方法进行三维网格构建,以体素关系替代点对关系,提高了算法的稳健性.基于特征的配准通过选取点集中的关键基元,如几何特征来求解变换参数.根据基元的不同,特征又分为点、线和面特征.基于点特征主要是提取对象的关键点(如角点、拐点等)和特征描述子,通过相似度估计对特征点对进行筛选.借鉴计算机视觉中常用的SIFT描述子,Nakamura和Wakita[6 ] 提出了同余变换不变特征(Congruence transformation Invariant Feature, CIF)的全局匹配算法,Ma和Liu[7 ] 采用快速点特征直方图(Fast Point Feature Histograms, FPFH)方法计算邻域特征实现特征相似度匹配,不足之处在于搜索邻域和提取多维特征计算开销大,处理大数据量时效率低.在结构化场景如有建筑物的情况,线状特征可以大大提高配准效率.Yuan等[8 ] 利用分权最小二乘拟合模糊聚类算法分割点云,然后选择符合线性分布的特征计算旋转参数,继而得到平移参数.王永波等[9 ] 将同名线状特征中的Plücker直线坐标作为约束条件,对目标函数极值化求得配准参数,减少了算法迭代对参数初值的依赖.城市环境中的平面特征或曲面特征较多,据此进行配准并与对应的平面上的特征点建立关系,即可取得较好的匹配效果[10 ] . ...
直线特征约束下利用Plücker坐标描述的LiDAR点云无初值配准方法
1
2018
... 遥感变化检测的关键是多期数据的高精度配准,特别是对于输电通道机载LiDAR点云数据,由于线路距离长、跨越的地形复杂,LiDAR系统获取的离散点云往往数以千亿,高效、高精度的数据处理和配准对于线路变化检测尤为重要[3 ] .目前点云配准方法有基于点的配准和基于特征的配准.前者直接对点云操作,确定点集间的对应关系,可称作无特征的配准算法,常见的如ICP算法精度高,但存在计算效率和鲁棒性方面的问题[4 ] ,为此很多学者提出了改进的ICP算法.Li等[5 ] 基于体素化方法进行三维网格构建,以体素关系替代点对关系,提高了算法的稳健性.基于特征的配准通过选取点集中的关键基元,如几何特征来求解变换参数.根据基元的不同,特征又分为点、线和面特征.基于点特征主要是提取对象的关键点(如角点、拐点等)和特征描述子,通过相似度估计对特征点对进行筛选.借鉴计算机视觉中常用的SIFT描述子,Nakamura和Wakita[6 ] 提出了同余变换不变特征(Congruence transformation Invariant Feature, CIF)的全局匹配算法,Ma和Liu[7 ] 采用快速点特征直方图(Fast Point Feature Histograms, FPFH)方法计算邻域特征实现特征相似度匹配,不足之处在于搜索邻域和提取多维特征计算开销大,处理大数据量时效率低.在结构化场景如有建筑物的情况,线状特征可以大大提高配准效率.Yuan等[8 ] 利用分权最小二乘拟合模糊聚类算法分割点云,然后选择符合线性分布的特征计算旋转参数,继而得到平移参数.王永波等[9 ] 将同名线状特征中的Plücker直线坐标作为约束条件,对目标函数极值化求得配准参数,减少了算法迭代对参数初值的依赖.城市环境中的平面特征或曲面特征较多,据此进行配准并与对应的平面上的特征点建立关系,即可取得较好的匹配效果[10 ] . ...
Fast and robust 3D feature extraction from sparse point clouds
1
2016
... 遥感变化检测的关键是多期数据的高精度配准,特别是对于输电通道机载LiDAR点云数据,由于线路距离长、跨越的地形复杂,LiDAR系统获取的离散点云往往数以千亿,高效、高精度的数据处理和配准对于线路变化检测尤为重要[3 ] .目前点云配准方法有基于点的配准和基于特征的配准.前者直接对点云操作,确定点集间的对应关系,可称作无特征的配准算法,常见的如ICP算法精度高,但存在计算效率和鲁棒性方面的问题[4 ] ,为此很多学者提出了改进的ICP算法.Li等[5 ] 基于体素化方法进行三维网格构建,以体素关系替代点对关系,提高了算法的稳健性.基于特征的配准通过选取点集中的关键基元,如几何特征来求解变换参数.根据基元的不同,特征又分为点、线和面特征.基于点特征主要是提取对象的关键点(如角点、拐点等)和特征描述子,通过相似度估计对特征点对进行筛选.借鉴计算机视觉中常用的SIFT描述子,Nakamura和Wakita[6 ] 提出了同余变换不变特征(Congruence transformation Invariant Feature, CIF)的全局匹配算法,Ma和Liu[7 ] 采用快速点特征直方图(Fast Point Feature Histograms, FPFH)方法计算邻域特征实现特征相似度匹配,不足之处在于搜索邻域和提取多维特征计算开销大,处理大数据量时效率低.在结构化场景如有建筑物的情况,线状特征可以大大提高配准效率.Yuan等[8 ] 利用分权最小二乘拟合模糊聚类算法分割点云,然后选择符合线性分布的特征计算旋转参数,继而得到平移参数.王永波等[9 ] 将同名线状特征中的Plücker直线坐标作为约束条件,对目标函数极值化求得配准参数,减少了算法迭代对参数初值的依赖.城市环境中的平面特征或曲面特征较多,据此进行配准并与对应的平面上的特征点建立关系,即可取得较好的匹配效果[10 ] . ...
Enhanced ICP for the registration of Large-scale 3D environment models: an experimental study
1
2016
... 点云配准即通过一定的匹配方法建立同名点或同名特征间的对应关系和配准模型,将不同时期获取的点集投影到统一的坐标系中.配准模型通常可分为刚体和非刚体模型[11 ] ,实际环境和应用中一般不考虑局部扭曲等形变,认为仅存在平移、旋转和缩放的关系,因此点云配准即构建配准数据集间的刚体变换矩阵. ...
基于保局PCA的三维点云配准算法
1
2018
... PCA在光学影像处理中应用较多,对三维点云数据进行PCA主轴变化既可以减少数据集的维数、保持数据集对方差贡献最大的特征,其特征矢量具有旋转不变性,而且算法的稳定性好[12 ] .3个特征向量表示为点云的3个主方向,建立以点云质心为原点、3个主方向为坐标轴的参考坐标系. ...
基于保局PCA的三维点云配准算法
1
2018
... PCA在光学影像处理中应用较多,对三维点云数据进行PCA主轴变化既可以减少数据集的维数、保持数据集对方差贡献最大的特征,其特征矢量具有旋转不变性,而且算法的稳定性好[12 ] .3个特征向量表示为点云的3个主方向,建立以点云质心为原点、3个主方向为坐标轴的参考坐标系. ...
Point cloud matching using singular value decomposition
1
2016
... 矩阵分解方法较多,其中奇异值分解(Singular Value Decomposition, SVD)可得到稳定且唯一的特征,在点云配准、信号处理等方面得到广泛应用[13 ] .利用点云自身的协方差矩阵X c o v 式(1) : ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}