Global sustainable development report 2019: the future is now-science for achieving sustainable development
1
2019
... 城市居住着55%的世界人口,承载了80%的全球经济产出,同时城市产生了66%的能源消耗以及75%的全球碳排放[1].按照目前的人口增长速度,到2030年,世界上60%的人口将生活在城市中,到2050年,这一比例将达到68%[2].在全球城镇化背景下,快速且无计划的城市化对人们的生活、健康以及地方、区域和全球范围的环境可持续产生了深远的影响[3-4].因此,更好地管理城市扩张和人口增长将是保障城市可持续的关键. ...
World Urbanization Prospects: The 2018 Revision
1
2019
... 城市居住着55%的世界人口,承载了80%的全球经济产出,同时城市产生了66%的能源消耗以及75%的全球碳排放[1].按照目前的人口增长速度,到2030年,世界上60%的人口将生活在城市中,到2050年,这一比例将达到68%[2].在全球城镇化背景下,快速且无计划的城市化对人们的生活、健康以及地方、区域和全球范围的环境可持续产生了深远的影响[3-4].因此,更好地管理城市扩张和人口增长将是保障城市可持续的关键. ...
近70 a天津主城区城市土地利用/覆盖变化遥感监测与时空分析
1
2020
... 城市居住着55%的世界人口,承载了80%的全球经济产出,同时城市产生了66%的能源消耗以及75%的全球碳排放[1].按照目前的人口增长速度,到2030年,世界上60%的人口将生活在城市中,到2050年,这一比例将达到68%[2].在全球城镇化背景下,快速且无计划的城市化对人们的生活、健康以及地方、区域和全球范围的环境可持续产生了深远的影响[3-4].因此,更好地管理城市扩张和人口增长将是保障城市可持续的关键. ...
近70 a天津主城区城市土地利用/覆盖变化遥感监测与时空分析
1
2020
... 城市居住着55%的世界人口,承载了80%的全球经济产出,同时城市产生了66%的能源消耗以及75%的全球碳排放[1].按照目前的人口增长速度,到2030年,世界上60%的人口将生活在城市中,到2050年,这一比例将达到68%[2].在全球城镇化背景下,快速且无计划的城市化对人们的生活、健康以及地方、区域和全球范围的环境可持续产生了深远的影响[3-4].因此,更好地管理城市扩张和人口增长将是保障城市可持续的关键. ...
近30 a来蒙古国乌兰巴托市城镇扩张及其驱动力分析
1
2019
... 城市居住着55%的世界人口,承载了80%的全球经济产出,同时城市产生了66%的能源消耗以及75%的全球碳排放[1].按照目前的人口增长速度,到2030年,世界上60%的人口将生活在城市中,到2050年,这一比例将达到68%[2].在全球城镇化背景下,快速且无计划的城市化对人们的生活、健康以及地方、区域和全球范围的环境可持续产生了深远的影响[3-4].因此,更好地管理城市扩张和人口增长将是保障城市可持续的关键. ...
近30 a来蒙古国乌兰巴托市城镇扩张及其驱动力分析
1
2019
... 城市居住着55%的世界人口,承载了80%的全球经济产出,同时城市产生了66%的能源消耗以及75%的全球碳排放[1].按照目前的人口增长速度,到2030年,世界上60%的人口将生活在城市中,到2050年,这一比例将达到68%[2].在全球城镇化背景下,快速且无计划的城市化对人们的生活、健康以及地方、区域和全球范围的环境可持续产生了深远的影响[3-4].因此,更好地管理城市扩张和人口增长将是保障城市可持续的关键. ...
Transforming Our World: The 2030 Agenda for Sustainable Development
1
2015
... 为了监测和评估城市可持续发展,2015年联合国提出的17项可持续发展目标(Sustainable Development Goals,SDGs)中,SDG11即“建设包容、安全、有抵御灾害能力和可持续的城市和人类住区”是重要的SDGs目标之一[5].其中,SDG11.3.1指标—土地使用率与人口增长率之比(the Ratio of Land Consumption Rate to Population Growth Rate,LCRPGR)可用来量化城市用地扩张和人口增长的协调关系.但是,该指标属于二级分类,即有明确的评价方法但无数据.因此,急需获取大尺度高精度城市空间分布信息. ...
A Modified Normalized Difference Impervious Surface Index (MNDISI) for automatic urban mapping from landsat imagery
2
2017
... 在城市扩展研究中,科学家们发现从遥感影像中提取的城市不透水面能够非常准确地反映城市地表信息以及城市土地利用强度[6-7].不透水面是水不能通过它下渗到土壤中的人工地表面,包括城市中的公路、车道、人行道、停车场、建筑屋顶等[8].实时、准确地提供不透水面信息,对于了解城市化进程、城市空间分布信息变化至关重要[9-10]. ...
... 城镇化最显著的特征包括城市空间扩张和人口增长,即土地城镇化和人口城镇化.实验采用SDG11.3.1指标评价印度城镇化进程.依照SDG11.3.1指标的评价方法,该指标以建成区面积增长率作为城市土地使用率[41],但建成区很难自动提取.不透水面同样可表征土地利用效率和强度,且在遥感语义上可自动快速提取[6-7].为快速表征土地城镇化与人口城镇化关系,本研究以不透水面替代建成区计算城市土地使用率与人口增长率之间的比值: ...
基于云平台的中哈干旱区典型城市地表覆盖变化遥感监测与比较
2
2020
... 在城市扩展研究中,科学家们发现从遥感影像中提取的城市不透水面能够非常准确地反映城市地表信息以及城市土地利用强度[6-7].不透水面是水不能通过它下渗到土壤中的人工地表面,包括城市中的公路、车道、人行道、停车场、建筑屋顶等[8].实时、准确地提供不透水面信息,对于了解城市化进程、城市空间分布信息变化至关重要[9-10]. ...
... 城镇化最显著的特征包括城市空间扩张和人口增长,即土地城镇化和人口城镇化.实验采用SDG11.3.1指标评价印度城镇化进程.依照SDG11.3.1指标的评价方法,该指标以建成区面积增长率作为城市土地使用率[41],但建成区很难自动提取.不透水面同样可表征土地利用效率和强度,且在遥感语义上可自动快速提取[6-7].为快速表征土地城镇化与人口城镇化关系,本研究以不透水面替代建成区计算城市土地使用率与人口增长率之间的比值: ...
基于云平台的中哈干旱区典型城市地表覆盖变化遥感监测与比较
2
2020
... 在城市扩展研究中,科学家们发现从遥感影像中提取的城市不透水面能够非常准确地反映城市地表信息以及城市土地利用强度[6-7].不透水面是水不能通过它下渗到土壤中的人工地表面,包括城市中的公路、车道、人行道、停车场、建筑屋顶等[8].实时、准确地提供不透水面信息,对于了解城市化进程、城市空间分布信息变化至关重要[9-10]. ...
... 城镇化最显著的特征包括城市空间扩张和人口增长,即土地城镇化和人口城镇化.实验采用SDG11.3.1指标评价印度城镇化进程.依照SDG11.3.1指标的评价方法,该指标以建成区面积增长率作为城市土地使用率[41],但建成区很难自动提取.不透水面同样可表征土地利用效率和强度,且在遥感语义上可自动快速提取[6-7].为快速表征土地城镇化与人口城镇化关系,本研究以不透水面替代建成区计算城市土地使用率与人口增长率之间的比值: ...
Impervious surface coverage: the emergence of a key environmental indicator
1
1996
... 在城市扩展研究中,科学家们发现从遥感影像中提取的城市不透水面能够非常准确地反映城市地表信息以及城市土地利用强度[6-7].不透水面是水不能通过它下渗到土壤中的人工地表面,包括城市中的公路、车道、人行道、停车场、建筑屋顶等[8].实时、准确地提供不透水面信息,对于了解城市化进程、城市空间分布信息变化至关重要[9-10]. ...
A Hierarchical multiscale super-pixel-based classification method for extracting urban impervious surface using deep residual network from worldvew-2 and LiDAR data
2
2019
... 在城市扩展研究中,科学家们发现从遥感影像中提取的城市不透水面能够非常准确地反映城市地表信息以及城市土地利用强度[6-7].不透水面是水不能通过它下渗到土壤中的人工地表面,包括城市中的公路、车道、人行道、停车场、建筑屋顶等[8].实时、准确地提供不透水面信息,对于了解城市化进程、城市空间分布信息变化至关重要[9-10]. ...
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
Annual maps of Global Artificial Impervious Area (GAIA) between 1985 and 2018
4
2020
... 在城市扩展研究中,科学家们发现从遥感影像中提取的城市不透水面能够非常准确地反映城市地表信息以及城市土地利用强度[6-7].不透水面是水不能通过它下渗到土壤中的人工地表面,包括城市中的公路、车道、人行道、停车场、建筑屋顶等[8].实时、准确地提供不透水面信息,对于了解城市化进程、城市空间分布信息变化至关重要[9-10]. ...
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
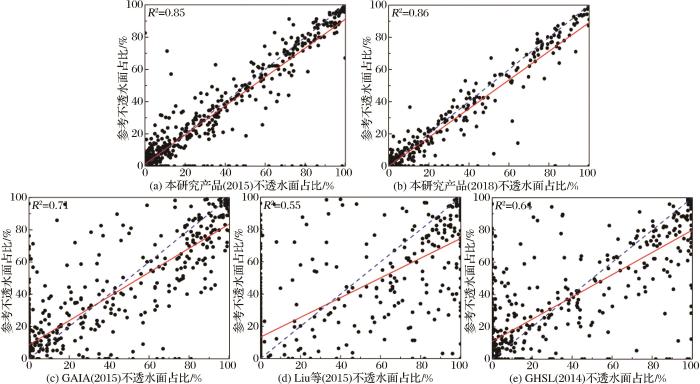
... 第二种验证方式采用不透水面百分比验证,在2015年和2018年两期提取结果中分别选择600和300个300 m×300 m验证区域(如图1所示),计算该区域内的不透水面百分比,与真实值进行回归验证,并且与GAIA[10]的2015年产品、Liu等[16]的2015年产品和GHSL[14]的2014年产品进行对比验证,如图4所示.其中本研究2015年和2018年提取结果的拟合值R2分别为0.85和0.86,其他产品R2值基本在0.8以下.对比显示本研究提取结果与参考数据呈现出更好地线性相关,较其他产品精度有明显提高. ...
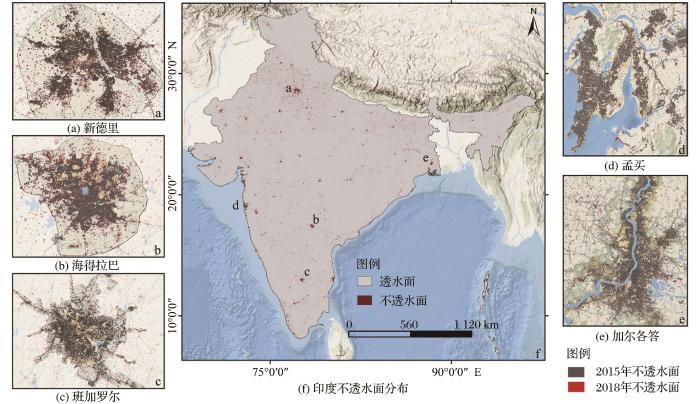
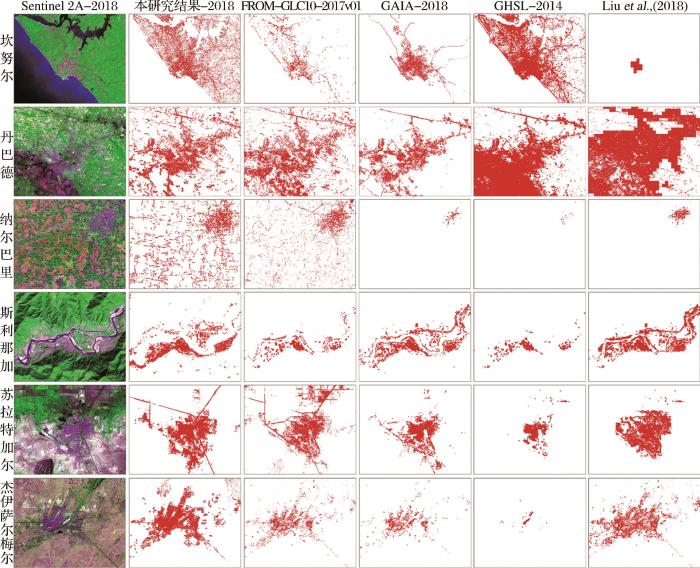
... 为进一步验证本研究不透水面分布数据的精度,将本研究2018年的提取结果与FROM-GLC 2017v01[17]、GAIA(2015)[10]、GHSL(2014)[14]以及Liu等(2018)[16]的结果进行对比.印度地理环境复杂,图5中比较了6个具有不同自然背景的代表型城市.包括居住区离散且被植被遮挡的城市坎努尔和纳尔巴里、矿产资源型城市丹巴德、地形起伏较大的山谷城市斯利那加、半干旱和干旱为主的城市苏拉特加尔和杰伊萨尔梅尔.图中第1列为2018年Sentinel 2A的假彩色合成影像;第2~5列依次为本研究的提取结果以及其它城市产品,其中白色代表透水面,红色代表不透水面. ...
基于Google Earth Engine的中国植被覆盖度时空变化特征分析
1
2020
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
基于Google Earth Engine的中国植被覆盖度时空变化特征分析
1
2020
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
基于GEE平台的海岛地表覆盖提取及变化监测—以苏拉威西岛为例
1
2021
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
基于GEE平台的海岛地表覆盖提取及变化监测—以苏拉威西岛为例
1
2021
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
Updating the 2001 national land cover database impervious surface products to 2006 using Landsat imagery change detection methods
1
2010
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
2014)
2
1990
... 第二种验证方式采用不透水面百分比验证,在2015年和2018年两期提取结果中分别选择600和300个300 m×300 m验证区域(如图1所示),计算该区域内的不透水面百分比,与真实值进行回归验证,并且与GAIA[10]的2015年产品、Liu等[16]的2015年产品和GHSL[14]的2014年产品进行对比验证,如图4所示.其中本研究2015年和2018年提取结果的拟合值R2分别为0.85和0.86,其他产品R2值基本在0.8以下.对比显示本研究提取结果与参考数据呈现出更好地线性相关,较其他产品精度有明显提高. ...
... 为进一步验证本研究不透水面分布数据的精度,将本研究2018年的提取结果与FROM-GLC 2017v01[17]、GAIA(2015)[10]、GHSL(2014)[14]以及Liu等(2018)[16]的结果进行对比.印度地理环境复杂,图5中比较了6个具有不同自然背景的代表型城市.包括居住区离散且被植被遮挡的城市坎努尔和纳尔巴里、矿产资源型城市丹巴德、地形起伏较大的山谷城市斯利那加、半干旱和干旱为主的城市苏拉特加尔和杰伊萨尔梅尔.图中第1列为2018年Sentinel 2A的假彩色合成影像;第2~5列依次为本研究的提取结果以及其它城市产品,其中白色代表透水面,红色代表不透水面. ...
Urban footprint processor-fully automated processing Chain generating settlement masks from global data of the TanDEM-X mission
0
2013
High-resolution multi-temporal mapping of global urban land using landsat images based on the Google Earth Engine Platform
3
2018
... 第二种验证方式采用不透水面百分比验证,在2015年和2018年两期提取结果中分别选择600和300个300 m×300 m验证区域(如图1所示),计算该区域内的不透水面百分比,与真实值进行回归验证,并且与GAIA[10]的2015年产品、Liu等[16]的2015年产品和GHSL[14]的2014年产品进行对比验证,如图4所示.其中本研究2015年和2018年提取结果的拟合值R2分别为0.85和0.86,其他产品R2值基本在0.8以下.对比显示本研究提取结果与参考数据呈现出更好地线性相关,较其他产品精度有明显提高. ...
... 为进一步验证本研究不透水面分布数据的精度,将本研究2018年的提取结果与FROM-GLC 2017v01[17]、GAIA(2015)[10]、GHSL(2014)[14]以及Liu等(2018)[16]的结果进行对比.印度地理环境复杂,图5中比较了6个具有不同自然背景的代表型城市.包括居住区离散且被植被遮挡的城市坎努尔和纳尔巴里、矿产资源型城市丹巴德、地形起伏较大的山谷城市斯利那加、半干旱和干旱为主的城市苏拉特加尔和杰伊萨尔梅尔.图中第1列为2018年Sentinel 2A的假彩色合成影像;第2~5列依次为本研究的提取结果以及其它城市产品,其中白色代表透水面,红色代表不透水面. ...
... [16]的结果进行对比.印度地理环境复杂,图5中比较了6个具有不同自然背景的代表型城市.包括居住区离散且被植被遮挡的城市坎努尔和纳尔巴里、矿产资源型城市丹巴德、地形起伏较大的山谷城市斯利那加、半干旱和干旱为主的城市苏拉特加尔和杰伊萨尔梅尔.图中第1列为2018年Sentinel 2A的假彩色合成影像;第2~5列依次为本研究的提取结果以及其它城市产品,其中白色代表透水面,红色代表不透水面. ...
Stable classification with limited sample: transferring a 30 m resolution sample set collected in 2015 to mapping 10 m resolution Global Land Cover in 2017
3
2019
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
... 为进一步验证本研究不透水面分布数据的精度,将本研究2018年的提取结果与FROM-GLC 2017v01[17]、GAIA(2015)[10]、GHSL(2014)[14]以及Liu等(2018)[16]的结果进行对比.印度地理环境复杂,图5中比较了6个具有不同自然背景的代表型城市.包括居住区离散且被植被遮挡的城市坎努尔和纳尔巴里、矿产资源型城市丹巴德、地形起伏较大的山谷城市斯利那加、半干旱和干旱为主的城市苏拉特加尔和杰伊萨尔梅尔.图中第1列为2018年Sentinel 2A的假彩色合成影像;第2~5列依次为本研究的提取结果以及其它城市产品,其中白色代表透水面,红色代表不透水面. ...
... 通过对比证明了实验提取结果具有很高的精度,以及本研究提出的SAR和光学影像融合提取大尺度不透水面方法的有效性.特别地,相较其他产品,实验提出的方法对于识别低纬度地区(印度北部和西南部——如坎努尔和纳尔巴里)的居民点以及树木、篱笆等混合型人类住区有更好的语义细节.同时,在干旱半干旱地区,实验提取结果和10 m分辨率FROM-GLC产品[17]相较于其他30 m分辨率产品,对城市边界的刻画以及内部细节更具完整性,保证了该类型地区提取结果的准确性. ...
基于面向对象的东营市城乡建设用地信息提取
1
2017
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
基于面向对象的东营市城乡建设用地信息提取
1
2017
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
时序数据集构建质量对土地覆盖分类精度的影响研究
1
2020
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
时序数据集构建质量对土地覆盖分类精度的影响研究
1
2020
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
基于GF-1和Sentinel-1A的漓江流域典型地物信息提取
1
2020
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
基于GF-1和Sentinel-1A的漓江流域典型地物信息提取
1
2020
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
基于Google Earth Engine的南方滨海盐沼植被时空演变特征分析
0
2021
基于Google Earth Engine的南方滨海盐沼植被时空演变特征分析
0
2021
基于改进NSST-PCNN的光学与SAR图像融合去云方法
0
2021
基于改进NSST-PCNN的光学与SAR图像融合去云方法
0
2021
Assessing 40 years of spatial dynamics and patterns in megacities along the belt and road region using satellite imagery
1
2020
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
High-spatiotemporal-resolution mapping of global urban change from 1985 to 2015
1
2020
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
Principles and applications of the global human settlement layer as baseline for the land use efficiency indicator-SDG 11.3.1
2
2019
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
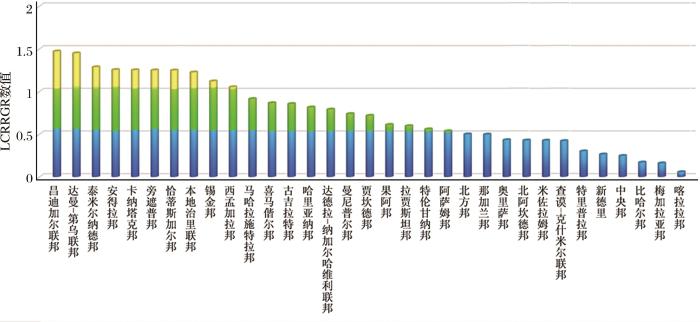
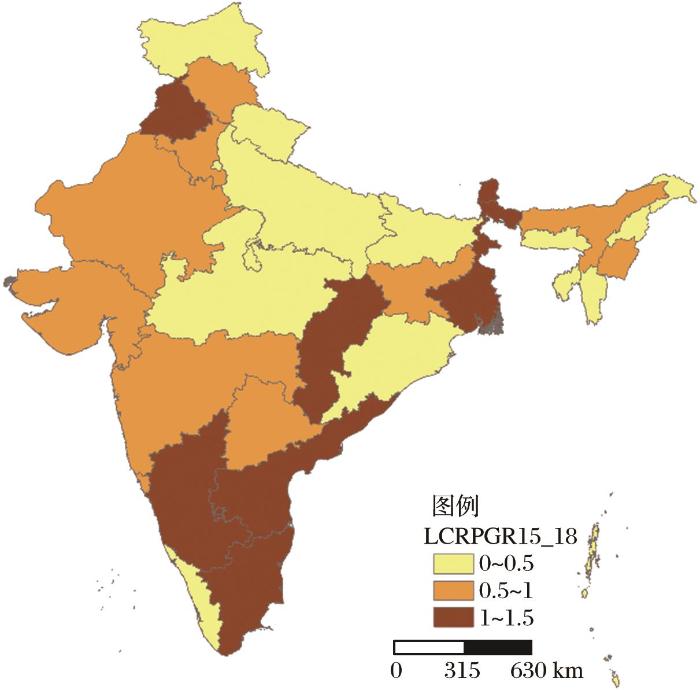
... 根据LCRPGR的数值分布可将其划分为5个等级(默认LCR>0):①LCRPGR<-1,人口衰退速率大于城市扩张速率;②-1<LCRPGR<0,人口衰退速率小于城市扩张速率;③0<LCRPGR<1,人口增长速率大于城市扩张速率;④1<LCRPGR<2,城市扩张速率是人口增长速率的1~2倍;⑤LCRPGR>2,城市扩张速率超过人口增长速率2倍以上[25]. ...
Multi-scale estimation of land use efficiency (SDG 11.3.1) across 25 years using global open and free data
1
2019
... 随着高分辨率卫星遥感影像和新兴的大数据云计算平台(例如Google Earth Engine,GEE)问世[11-12],许多基于遥感影像的区域和全球尺度城市制图产品已经发布[10,13-17].目前,开展大区域乃至全球尺度的不透水面遥感制图大多基于中低分辨率光学影像.但由于城市地物的多样性以及城市不透水面材质的复杂性[9],中低分辨率光学影像应用于城市信息提取中存在分辨率较低、混合像元、异物同谱、同物异谱等问题[18-19];受云雾天气的影响,尤其在低纬度地区很难获取质量较好的光学影像,这为城市动态遥感监测带来很大困难[20-23].另外,Liu 等[24]按照城市生态分区对比分析了不同的全球尺度城市产品,发现产品之间存在很大的差异,这些产品在非洲、干旱半干旱的中亚等区域精度较差.目前对于SDG11.3.1指标监测与评估的研究结果相对较少[25-26],尤其在印度、非洲、中西亚等欠发达国家和地区,基本没有相应的研究结果,主要由于数据的缺失及现有的产品精度和分辨率较低.因此,开展高分辨率高精度全球城市不透水面制图在为联合国SDG城市可持续发展提供空间数据与决策支持方面具有重要意义. ...
World development indicators
1
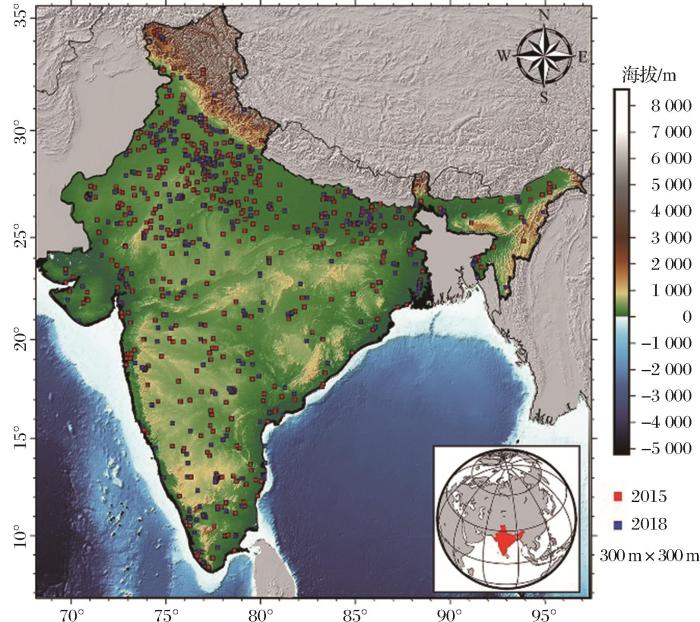
... 印度位于亚洲南部,是世界上人口第二、面积第七的国家,地理位置如图1所示.它由28个邦、6个联邦及1个国家首都组成,约13.53亿人口[27] . ...
India’s ascent: five opportunities for growth and transformation
1
... 印度是人口仅次于我国的发展中国家,在“一带一路”倡议中国家战略地理位置非常重要.与我国一样,印度正处于城市快速发展阶段,城镇化趋势持续升高,2018年印度城镇人口占比34.03%,预计到2025年,印度城镇人口将新增2.15亿,占总人口的38%[28].分析印度城市土地扩张与人口增长的协调关系,不仅可以了解其城镇化可持续发展状况,而且对我国新型城镇化建设以及城市可持续发展也有一定的参考意义,同时为我国推动“一带一路”倡议的实施有着重要的战略意义. ...
High-resolution urban land mapping in China from sentinel 1A/2 imagery based on Google Earth Engine
1
2019
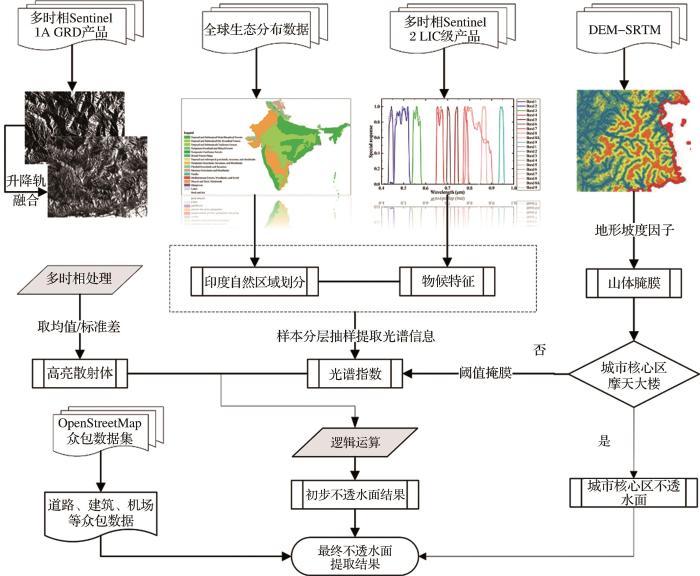
... 预处理包括Sentinel 2A光学影像预处理和Sentinel 1A雷达影像预处理两部分.首先对光学影像进行预处理,鉴于实验时间尺度为2015年和2018年,数据源中只有Level 1C级星上反射率(Top of Atmosphere,TOA)影像覆盖此时段,且印度位于赤道附近,大部分影像都有云层覆盖,因此须对其进行去云处理.TOA影像中含有云掩膜(QA60)波段,包括云掩膜和卷云掩膜两部分,同时该影像含有1个衡量云量得分的波段,数值越高表征该像元是云的可能性越高,对云掩膜函数和云量得分大于20的像元进行掩膜处理,然后逐像元求取每年内所有影像的中值,以达到去云目的.其次是对SAR影像进行预处理,GEE平台上已对其进行了地形纠正、噪声削弱和对数缩放处理,但同时损失了一部分原始影像的信息,因此实验对其进行乘方逆运算[29],将dB值转为散射系数(σ°),便于散射特征的阈值选取. ...
Monitoring vegetation systems in the great plains with ERTS
1
1973
... 首先利用SAR及光学光谱指数(归一化差异植被指数(Normalized Difference Vegetation Index,NDVI)[30]、修正的归一化差异水体指数(Modified Normalized Difference Water Index,MNDWI)[31]、自动水体提取指数(Automate Water Extraction Index,AWEI)[32]以及城市阴影指数(Urban Shadow Index,USI)[33])进行城市不透水面的提取,初步确定城市不透水面. ...
A study on information extraction of water body with the Modified Normalized Difference Water Index (MNDWI)
1
2005
... 首先利用SAR及光学光谱指数(归一化差异植被指数(Normalized Difference Vegetation Index,NDVI)[30]、修正的归一化差异水体指数(Modified Normalized Difference Water Index,MNDWI)[31]、自动水体提取指数(Automate Water Extraction Index,AWEI)[32]以及城市阴影指数(Urban Shadow Index,USI)[33])进行城市不透水面的提取,初步确定城市不透水面. ...
Automated water extraction index: a new technique for surface water mapping using Landsat imagery
1
2014
... 首先利用SAR及光学光谱指数(归一化差异植被指数(Normalized Difference Vegetation Index,NDVI)[30]、修正的归一化差异水体指数(Modified Normalized Difference Water Index,MNDWI)[31]、自动水体提取指数(Automate Water Extraction Index,AWEI)[32]以及城市阴影指数(Urban Shadow Index,USI)[33])进行城市不透水面的提取,初步确定城市不透水面. ...
Two-Step Urban Water Index(TSUWI): A new technique for high-resolution mapping of urban surface water
1
2018
... 首先利用SAR及光学光谱指数(归一化差异植被指数(Normalized Difference Vegetation Index,NDVI)[30]、修正的归一化差异水体指数(Modified Normalized Difference Water Index,MNDWI)[31]、自动水体提取指数(Automate Water Extraction Index,AWEI)[32]以及城市阴影指数(Urban Shadow Index,USI)[33])进行城市不透水面的提取,初步确定城市不透水面. ...
Terrestrial ecoregions of the world: a new map of life on earth: a new global map of terrestrial ecoregions provides an innovative tool for conserving biodiversity
1
2001
... (1)先通过生态功能分布数据[34]将研究区土地类型划分为干旱、半干旱以及非干旱地区3种处理单元,不同的处理单元采用不同的输入特征(SAR散射系数以及多种光谱指数),以此来提取潜在的不透水面信息.其次在地形起伏较大的地区,依据地形坡度因子(slope)进行阈值分割以剔除山体,通过自适应迭代法[35-36]求取阈值,值大于10表征山体.最后剔除一些在光谱特征上容易与不透水面混分的土地类型,主要包括城市建筑物阴影、水体、自然硬质化地表面和粗糙裸土等,这里引入AWEI指数结合城市阴影指数USI,其计算公式如下: ...
湖泊水体遥感提取方法比较研究
1
2015
... (1)先通过生态功能分布数据[34]将研究区土地类型划分为干旱、半干旱以及非干旱地区3种处理单元,不同的处理单元采用不同的输入特征(SAR散射系数以及多种光谱指数),以此来提取潜在的不透水面信息.其次在地形起伏较大的地区,依据地形坡度因子(slope)进行阈值分割以剔除山体,通过自适应迭代法[35-36]求取阈值,值大于10表征山体.最后剔除一些在光谱特征上容易与不透水面混分的土地类型,主要包括城市建筑物阴影、水体、自然硬质化地表面和粗糙裸土等,这里引入AWEI指数结合城市阴影指数USI,其计算公式如下: ...
湖泊水体遥感提取方法比较研究
1
2015
... (1)先通过生态功能分布数据[34]将研究区土地类型划分为干旱、半干旱以及非干旱地区3种处理单元,不同的处理单元采用不同的输入特征(SAR散射系数以及多种光谱指数),以此来提取潜在的不透水面信息.其次在地形起伏较大的地区,依据地形坡度因子(slope)进行阈值分割以剔除山体,通过自适应迭代法[35-36]求取阈值,值大于10表征山体.最后剔除一些在光谱特征上容易与不透水面混分的土地类型,主要包括城市建筑物阴影、水体、自然硬质化地表面和粗糙裸土等,这里引入AWEI指数结合城市阴影指数USI,其计算公式如下: ...
基于GEE平台的广州市主城区不透水面时间序列提取
1
2020
... (1)先通过生态功能分布数据[34]将研究区土地类型划分为干旱、半干旱以及非干旱地区3种处理单元,不同的处理单元采用不同的输入特征(SAR散射系数以及多种光谱指数),以此来提取潜在的不透水面信息.其次在地形起伏较大的地区,依据地形坡度因子(slope)进行阈值分割以剔除山体,通过自适应迭代法[35-36]求取阈值,值大于10表征山体.最后剔除一些在光谱特征上容易与不透水面混分的土地类型,主要包括城市建筑物阴影、水体、自然硬质化地表面和粗糙裸土等,这里引入AWEI指数结合城市阴影指数USI,其计算公式如下: ...
基于GEE平台的广州市主城区不透水面时间序列提取
1
2020
... (1)先通过生态功能分布数据[34]将研究区土地类型划分为干旱、半干旱以及非干旱地区3种处理单元,不同的处理单元采用不同的输入特征(SAR散射系数以及多种光谱指数),以此来提取潜在的不透水面信息.其次在地形起伏较大的地区,依据地形坡度因子(slope)进行阈值分割以剔除山体,通过自适应迭代法[35-36]求取阈值,值大于10表征山体.最后剔除一些在光谱特征上容易与不透水面混分的土地类型,主要包括城市建筑物阴影、水体、自然硬质化地表面和粗糙裸土等,这里引入AWEI指数结合城市阴影指数USI,其计算公式如下: ...
A new method for gray-level picture thresholding using the entropy of the histogram
1
1985
... 其次确立SAR散射系数、NDVI以及MNDWI指数阈值的选取原则,实验收集印度城市生态功能分布数据,以经纬度5°×5°的格网作为印度不透水面提取单位,每单位按生态分布随机选取一定数量的样本,将其进行像元统计,根据“双峰法”确定特定生态类型的参考区块阈值区间.实际上,许多灰度图像的像素值并不总是具有双峰分布[37],无法使用此方法进行分割.在这种情况下,实验采用了基于强明暗对比分析的阈值分割.为了获得阈值,实验选择了高亮度城市区域和暗水体区域.这种景观模式在SAR数据中可以产生双峰分布,有利于“双峰法”的应用.综合考量优选出对应生态区内的阈值,逐单位按阈值选取原则提取各生态层不透水面并输出结果.最后,由于SAR对沥青混凝土等材料显示出低散射特征,为了更精细地提取城市不透水面信息,沥青和机场等地物引入开放街道图(Open Street Map,OSM)数据或单独通过光学物候特征提取来进行补充. ...
The size, scale, and shape of cities
1
2008
... 依据SDG11.3.1指标内容,需将城市范围与城市人口建立耦合关系,但城乡边界在全球范围内定义是不同的,城市范围往往随着时间变化也存在变动,一些学者引入城市标度率(Scaling Law)来刻画城市的大小和形状[38-39],但因数据网格尺度不同而存在偏差和不确定性.欧美依据完备的调查统计结果和清晰的界定概念,对城市范围和城市人口耦合做了大量研究[40],实验基于上述的欧美研究体系,根据Worldpop 100 m×100 m人口格网数据以及印度对应城市行政范围,识别出城市范围.首先,选择每平方公里人口大于1 500的地区定义为城市高密度集群单元.其次,将相邻的高密度集群单元分组.最后通过多次迭代众数滤波来填补空白和平滑边界.即如果某个高密度集群单元周围有5个或5个以上的单元属于同一高密度集群,则它将被添加到此高密度集群中,重复此操作,直到不再添加单元为止[40].印度的城市结构比较复杂,在实际操作中上述人口阈值(每平方公里人口数1 500)往往需要根据印度各邦域城市行政范围进行适当调整,实验依据城市位置坐标均匀布设参考样本,获取对应城市的经验阈值,与实际城市范围进行比对,最终确定每平方公里人口数700~1 500的阈值区间为城乡分割的判断依据,同时对照不透水面的空间分布做聚类分析,确定合理的城市范围. ...
城市范围界定与标度律
1
2017
... 依据SDG11.3.1指标内容,需将城市范围与城市人口建立耦合关系,但城乡边界在全球范围内定义是不同的,城市范围往往随着时间变化也存在变动,一些学者引入城市标度率(Scaling Law)来刻画城市的大小和形状[38-39],但因数据网格尺度不同而存在偏差和不确定性.欧美依据完备的调查统计结果和清晰的界定概念,对城市范围和城市人口耦合做了大量研究[40],实验基于上述的欧美研究体系,根据Worldpop 100 m×100 m人口格网数据以及印度对应城市行政范围,识别出城市范围.首先,选择每平方公里人口大于1 500的地区定义为城市高密度集群单元.其次,将相邻的高密度集群单元分组.最后通过多次迭代众数滤波来填补空白和平滑边界.即如果某个高密度集群单元周围有5个或5个以上的单元属于同一高密度集群,则它将被添加到此高密度集群中,重复此操作,直到不再添加单元为止[40].印度的城市结构比较复杂,在实际操作中上述人口阈值(每平方公里人口数1 500)往往需要根据印度各邦域城市行政范围进行适当调整,实验依据城市位置坐标均匀布设参考样本,获取对应城市的经验阈值,与实际城市范围进行比对,最终确定每平方公里人口数700~1 500的阈值区间为城乡分割的判断依据,同时对照不透水面的空间分布做聚类分析,确定合理的城市范围. ...
城市范围界定与标度律
1
2017
... 依据SDG11.3.1指标内容,需将城市范围与城市人口建立耦合关系,但城乡边界在全球范围内定义是不同的,城市范围往往随着时间变化也存在变动,一些学者引入城市标度率(Scaling Law)来刻画城市的大小和形状[38-39],但因数据网格尺度不同而存在偏差和不确定性.欧美依据完备的调查统计结果和清晰的界定概念,对城市范围和城市人口耦合做了大量研究[40],实验基于上述的欧美研究体系,根据Worldpop 100 m×100 m人口格网数据以及印度对应城市行政范围,识别出城市范围.首先,选择每平方公里人口大于1 500的地区定义为城市高密度集群单元.其次,将相邻的高密度集群单元分组.最后通过多次迭代众数滤波来填补空白和平滑边界.即如果某个高密度集群单元周围有5个或5个以上的单元属于同一高密度集群,则它将被添加到此高密度集群中,重复此操作,直到不再添加单元为止[40].印度的城市结构比较复杂,在实际操作中上述人口阈值(每平方公里人口数1 500)往往需要根据印度各邦域城市行政范围进行适当调整,实验依据城市位置坐标均匀布设参考样本,获取对应城市的经验阈值,与实际城市范围进行比对,最终确定每平方公里人口数700~1 500的阈值区间为城乡分割的判断依据,同时对照不透水面的空间分布做聚类分析,确定合理的城市范围. ...
A harmonised definition of cities and rural areas: the new degree of urbanization
2
2014
... 依据SDG11.3.1指标内容,需将城市范围与城市人口建立耦合关系,但城乡边界在全球范围内定义是不同的,城市范围往往随着时间变化也存在变动,一些学者引入城市标度率(Scaling Law)来刻画城市的大小和形状[38-39],但因数据网格尺度不同而存在偏差和不确定性.欧美依据完备的调查统计结果和清晰的界定概念,对城市范围和城市人口耦合做了大量研究[40],实验基于上述的欧美研究体系,根据Worldpop 100 m×100 m人口格网数据以及印度对应城市行政范围,识别出城市范围.首先,选择每平方公里人口大于1 500的地区定义为城市高密度集群单元.其次,将相邻的高密度集群单元分组.最后通过多次迭代众数滤波来填补空白和平滑边界.即如果某个高密度集群单元周围有5个或5个以上的单元属于同一高密度集群,则它将被添加到此高密度集群中,重复此操作,直到不再添加单元为止[40].印度的城市结构比较复杂,在实际操作中上述人口阈值(每平方公里人口数1 500)往往需要根据印度各邦域城市行政范围进行适当调整,实验依据城市位置坐标均匀布设参考样本,获取对应城市的经验阈值,与实际城市范围进行比对,最终确定每平方公里人口数700~1 500的阈值区间为城乡分割的判断依据,同时对照不透水面的空间分布做聚类分析,确定合理的城市范围. ...
... [40].印度的城市结构比较复杂,在实际操作中上述人口阈值(每平方公里人口数1 500)往往需要根据印度各邦域城市行政范围进行适当调整,实验依据城市位置坐标均匀布设参考样本,获取对应城市的经验阈值,与实际城市范围进行比对,最终确定每平方公里人口数700~1 500的阈值区间为城乡分割的判断依据,同时对照不透水面的空间分布做聚类分析,确定合理的城市范围. ...
Module 3: Land Consumption Rate
1
2018
... 城镇化最显著的特征包括城市空间扩张和人口增长,即土地城镇化和人口城镇化.实验采用SDG11.3.1指标评价印度城镇化进程.依照SDG11.3.1指标的评价方法,该指标以建成区面积增长率作为城市土地使用率[41],但建成区很难自动提取.不透水面同样可表征土地利用效率和强度,且在遥感语义上可自动快速提取[6-7].为快速表征土地城镇化与人口城镇化关系,本研究以不透水面替代建成区计算城市土地使用率与人口增长率之间的比值: ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}