




1 引 言
土壤水分是影响降水形成、径流渗流分配、蒸发蒸腾消耗等水分与能量过程的关键变量[1-7]。准确的土壤水分信息是支撑气象、气候、水文、环境、生态和灾害等众多领域研究与应用的必要基础,也是遥感传感器技术发展与定量研究方法长期以来的追求目标。2009年ESA发射被动微波土壤水分(与海洋盐度)专题卫星SMOS(Soil Moisture and Ocean Salinity),通过对反演算法的集成推动了多级、多尺度全球土壤水分数据产品的业务化生产[8-9]。2015年NASA发射主被动微波土壤水分专题卫星SMAP(Soil Moisture Active Passive),进一步增强了卫星遥感土壤水分的能力[10-11]。
在SMOS和SMAP的带动下,围绕星载微波土壤水分数据可靠性的验证研究在全球各地相继展开,大致经历了3个发展阶段。首先是2012—2013年间对SMOS Level 2(L2)级土壤水分数据的验证研究,集中在丹麦、德国、澳大利亚、加拿大、美国、荷兰和我国青藏高原地区,其主要特点是将基于点源的地面实测土壤水分数据与之比较[10-11]。随后是2014—2015年间分散在北非、印度、西班牙、阿根廷、葡萄牙、波兰、德国、美国和我国西南等多个国家和地区的对SMOS L2级土壤水分数据的验证研究,该时期的特点是除地面实测土壤水分数据外,还将少量其他卫星土壤水分数据或模型模拟数据与之比较[12-21]。近期是2016—2020年间在全球范围内对SMOS和SMAP的多级、新型土壤水分数据的验证研究,主要特点是二者之间及与其他多种卫星土壤水分数据和模型数据的综合比较[22-29]。
以机载方式进行亮温的观测和验证在国内外也多有开展,较有代表性的有澳大利亚Murrumbidgee河流域的AACES、SMAPEx-4/5机载实验、法国西南部的GAROLS机载实验、丹麦西部Skjern河流域的HOBE机载实验、德国多瑙河流域上游地区的机载实验、加拿大Saskatchewan省农林地区的CanEx-SM10机载实验、我国黑河流域的HiWATER综合试验、德国Rur流域的Tereno 2013机载实验和美国的SMAPVEX12、SMAPVEX16综合试验。它们就是将微波辐射计加载于航空平台上,通过星、机同步飞行的方式对SMOS和SMAP Level 1C(L1C)级观测亮温数据进行验证[33-43]。其必要性和意义在于机载试验能够获取远小于卫星空间分辨率的地表微波辐射亮温,与卫星观测亮温的相互对比能够有效揭示异质性地表的微波辐射构成,为辐射传输建模、土壤水分反演、尺度差异分析及转换等后续研究提供关键基础。
我国也在积极推进自主产权的微波卫星计划。为测试星上载荷性能、验证相关算法,2018年7月—9月,遥感科学国家重点实验室牵头与国内外多家单位发起、开展“碳、水循环和能量平衡遥感综合试验”(以下简称“综合试验”),针对水循环卫星、水资源卫星、辐射平衡卫星、碳卫星等卫星载荷进行性能验证,面向不同典型地表类型开展全波段主被动协同观测,研究异质地表和山地条件下像元尺度遥感关键参量的观测方案,旨在推动新型载荷与遥感技术的试验验证,促进空间地球科学的发展[44]。
图1
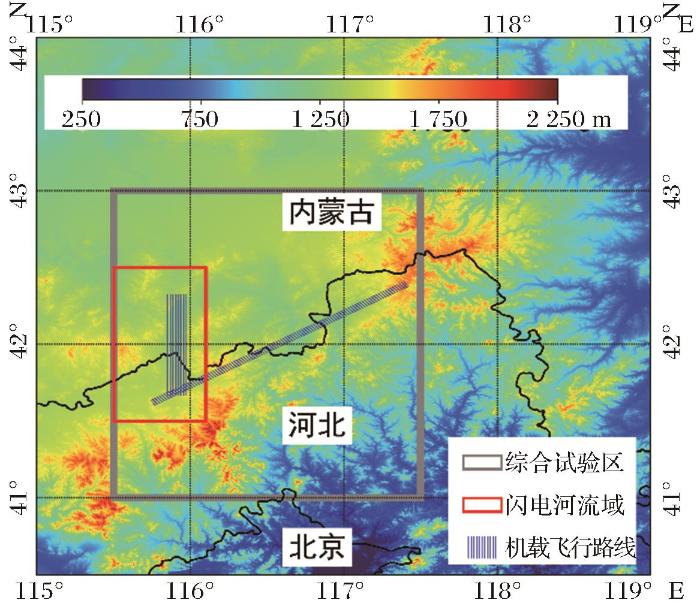
图1
试验区DEM(STRM30)与机载飞行路线(规划)
Fig.1
DEM (STRM30) of the study area and flight routes (planned)
2 数 据
2.1 L波段机载亮温数据
表1 SMOS与SMAP格点中心的距离
Table 1
| SMAP ID | SMOS ID | 距离 /km | SMAP ID | SMOS ID | 距离 /km |
|---|---|---|---|---|---|
| 3168-271 | 4069236 | 9.04 | 3168-264 | 4069753 | 5.64 |
| 3169-271 | 2.04 | 3168-265 | 5.18 | ||
| 3170-271 | 6.87 | 3170-268 | 4070263 | 8.08 | |
| 3168-270 | 4069237 | 4.74 | 3171-268 | 1.47 | |
| 3169-270 | 4.74 | 3170-266 | 4070264 | 5.49 | |
| 3168-268 | 4069238 | 3.27 | 3170-267 | 6.71 | |
| 3168-269 | 7.46 | 3171-266 | 6.52 | ||
| 3168-267 | 4069239 | 6.20 | 3171-267 | 7.57 | |
| 3170-270 | 4069749 | 4.02 | 3169-265 | 4070265 | 5.72 |
| 3171-270 | 5.24 | 3170-265 | 1.99 | ||
| 3171-271 | 9.20 | 3171-264 | 14.46 | ||
| 3169-269 | 4069750 | 6.22 | 3171-265 | 9.68 | |
| 3170-269 | 2.88 | 3168-263 | 4070266 | 10.40 | |
| 3171-269 | 9.89 | 3169-263 | 6.12 | ||
| 3169-267 | 4069751 | 4.16 | 3169-264 | 4.57 | |
| 3169-268 | 6.53 | 3170-263 | 9.20 | ||
| 3168-266 | 4069752 | 3.83 | 3170-264 | 8.25 | |
| 3169-266 | 3.99 | 3171-263 | 15.80 |
表2 机载观测时间与卫星过境时间及数据选用情况
Table 2
机载飞行 次数 | 日期 2018年9月 | 机载时间 (LST) | 卫星 | 升降轨 A/D | 卫星时间 (UTC) | 卫星时间 (LST) | 机-星时差 /min | 是否选用 是/否 |
|---|---|---|---|---|---|---|---|---|
| 1 | 17日 | 12:53—16:33 | SMOS | A | 16日 21:00:23—36 | 17日 05:00:23—36 | 473 | 是 |
| D | 17日 11:11:06—19 | 17日 19:11:06—19 | - | 否 | ||||
| SMAP | A | 17日 10:08:20—33 | 17日 18:08:20—33 | - | 否 | |||
| D | 16日 22:05:04—17 | 17日 07:05:04—17 | 348 | 是 | ||||
| 2 | 19日 | 9:03—11:20 | SMOS | A | 18日 21:22:34—47 | 19日 05:22:34—47 | 221 | 是 |
| - | - | - | - | - | ||||
| SMAP | A | 19日 09:44:00—13 | 19日 17:44:00—13 | - | 否 | |||
| D | 18日 22:40:47—59 | 19日 06:40:47—59 | 143 | 是 | ||||
| 3 | 24日 | 10:14—14:09 | SMOS | A | 23日 21:27:55—28:08 | 24日 05:27:55—28:08 | 287 | 是 |
| - | - | - | - | - | ||||
| SMAP | A | 24日 09:31:53—32:07 | 24日 17:31:53—32:07 | - | 否 | |||
| D | 23日 22:52:55—53:08 | 24日 06:52:55—53:08 | 202 | 是 | ||||
| 4 | 26日 | 10:51—14:17 | SMOS | A | 25日 21:50:04—17 | 26日 05:50:04—17 | 301 | 否 |
| D | 26日 10:20:43—52 | 26日 18:20:43—52 | - | 否 | ||||
| SMAP | - | - | - | - | - | |||
| - | - | - | - | - |
观测亮温被制作成EASE-Grid 2.0(Equal-Area Scalable Earth)格网系统下的1 km分辨率数据集,包含22.5°、25°、27.5°、30°和32.5°这5个角度下的水平(H)和垂直(V)极化亮温。本研究使用的L波段微波辐射计机载观测亮温数据是通过遥感科学国家重点实验室共享获得。
2.2 L波段卫星亮温数据
本研究使用的L波段卫星亮温数据分别为SMOS L1C亮温数据(SM_OPER_MIR_SCLF1C_*,V620)和SMAP L1C增强型亮温数据(SMAP_L1C_TB_E_*,V002),均由其官网免费下载。
2.3 地表温度数据
由于机载和卫星观测的时间无法严格同步(表2),相应的环境条件很可能存在差异,给二者亮温比较带来了不确定性。因此,本研究还使用了地表温度实测数据,以其反映机载和卫星各自观测时段内的地表温度条件,为解释亮温对比差异提供一定的辅助支持。
图2
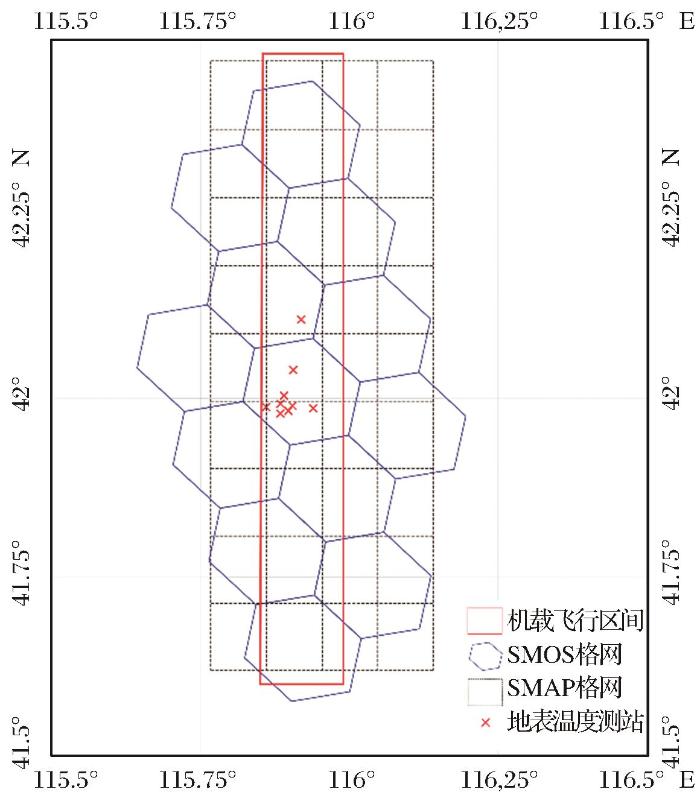
图2
机载飞行区间、SMOS和SMAP格点、地表温度测站的空间分布
Fig.2
Spatial distribution of the flight area, SMOS and SMAP grids and temperature sites
3 机载与卫星数据的时空匹配方法
受硬件设计和实际运行条件的影响,机载与卫星观测的极化方式、观测角度、时间和空间尺度等都存在一定差异,为实现二者亮温的有效比对,首先需要在这些方面进行匹配和统一。
3.1 空间匹配
如前文所述,机载、SMOS和SMAP的亮温数据分别按照EASE-Grid 2.0_1 km、ISEA 4H9_15 km、EASE-Grid 2.0_9 km 3种格网体系进行空间组织。在研究区内机载的飞行区间、两颗卫星的格点分布情况以及地表温度实测站点的位置如图2所示。其中,机载格点较小在此未做展示;SMOS格点和SMAP格点分别呈六边形和矩形,参照机载飞行区间,本研究最终选定了13个SMOS格点和36个SMAP格点与其进行匹配。以SMAP格点为参照查看其与周围邻近的SMOS格点的位置关系,如表1所示,经统计两颗卫星格点中心之间的最小、平均和最大距离分别为1.47、6.48和15.80 km。为实现机载和卫星亮温的有效对比和可靠验证,本研究设计了3种空间匹配方案:
(1)卫星大面元匹配机载小面元—未做平均:以卫星格点为参照,将落入格点内的所有机载亮温分别与其进行对比,即“一对多”的匹配方式;
(2)卫星大面元匹配机载小面元—数值平均:以卫星格点为参照,将落入其中的所有机载亮温的数值平均与其进行对比,即“一对一”的匹配方式;
(3)卫星大面元匹配机载小面元—最邻近:以卫星格点为参照,将与其格点中心最邻近的机载亮温与其进行对比,也是“一对一”的匹配方式。
3.2 时间匹配
需要说明的是,表2中的“机载时间(LST)”和“卫星时间(UTC)”是查看研究区内的机载格点、13个SMOS格点和36个SMAP格点的时间戳,将其中的最早和最晚时刻分别设置为各自观测的起始和结束时刻。机载飞行的时间较长,持续了一定的时段;而卫星过境的时间较短,在本研究中将其视为某一时刻。“是否选用”是指参考机载飞行时段对卫星数据的最终选定结果,研究中统一选用当地上午时间过境的卫星数据(Yes),但由于26日没有SMAP数据,故当天的SMOS数据也未能入选。由选用的卫星数据来看,卫星的过境时间总是早于机载飞行时间,因此,本研究将“机—星时差”定义为卫星观测的结束时刻与机载观测的起始时刻的时间差,按分钟计。
3.3 观测角度与极化方式
机载观测数据存储的是22.5°、25°、27.5°、30°和32.5°这5个角度下的水平(H)和垂直(V)极化亮温,需要选用与其观测角度和极化方式相匹配的SMOS和SMAP亮温数据。
SMOS采用的是0—60°多角度、全极化观测方式。对其亮温数据的选用和处理方式为:首先挑选出H和V极化亮温,进而分别以22.5°、25°、27.5°、30°和32.5°为中心,按照±0.5°的范围将其间多个(数量不定)亮温的数值平均作为该角度下的亮温值,从而获得与机载亮温相匹配的5个角度下的H、V极化亮温。
表3 机载和卫星亮温的总体数值分布
Table 3
| 亮温H/V(K) | 日期 | 最小值 | 平均值 | 中值 | 最大值 |
|---|---|---|---|---|---|
机载 (五角度) | 17 | 155.4—173.9/164.1—166.7 | 217.0—230.2/233.7—247.1 | 218.5—231.0/234.2—247.8 | 245.1—261.0/266.7—283.0 |
| 19 | 184.4—205.7/203.7—217.1 | 230.8—245.5/252.5—256.6 | 231.8—245.7/252.9—256.7 | 259.3—291.8/277.5—289.1 | |
| 24 | 155.2—205.2/163.0—206.6 | 241.6—250.6/255.4—264.9 | 243.0—251.1/255.7—264.9 | 263.4—270.9/282.4—297.8 | |
| SMOS | 17(32.5°) | 221.0 /242.2 | 239.6 /261.4 | 243.0 /260.7 | 256.1 /284.6 |
| 19(五角度) | 220.7—227.5/245.2—263.7 | 237.6—274.5/284.4—292.7 | 227.4—244.4/277.1—287.1 | 259.7—375.9/315.0—360.4 | |
| 24(五角度) | 219.7—240.5/158.8—244.5 | 242.2—252.6/246.3—266.6 | 238.5—254.5/249.3—264.5 | 261.7—283.1/276.5—291.0 | |
SMAP (40°) | 17 | 219.0 /247.1 | 229.3 /255.8 | 227.1 /255.6 | 245.1 /266.8 |
| 19 | 227.3 /253.0 | 237.0 /261.0 | 231.6 /258.1 | 253.0 /272.5 | |
| 24 | 230.9 /254.4 | 239.9 /262.2 | 239.3 /261.9 | 249.1 /270.5 |
图3
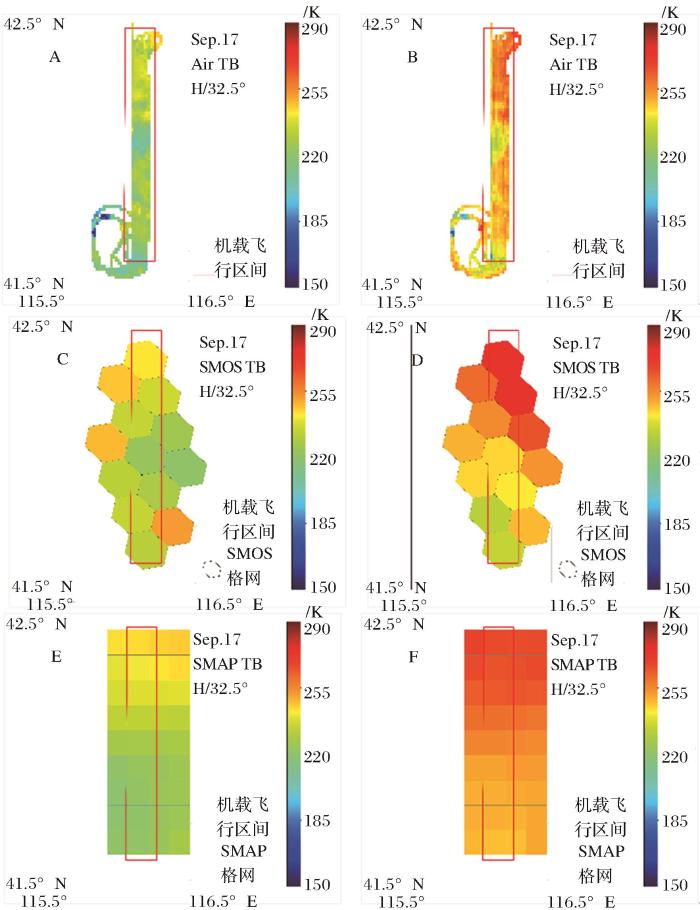
图3
2018年9月17日、32.5°机载和卫星亮温
Fig.3
Airborne and satellite brightness temperature in 32.5°, Sep.17, 2018
4 结 果
以亮温的数值差(卫星—机载)、相关系数(R)、无偏均方根误差(ubRMSE)作为量化指标,对机载和卫星亮温进行对比分析,主要发现如下。
4.1 机—星亮温的数值差异
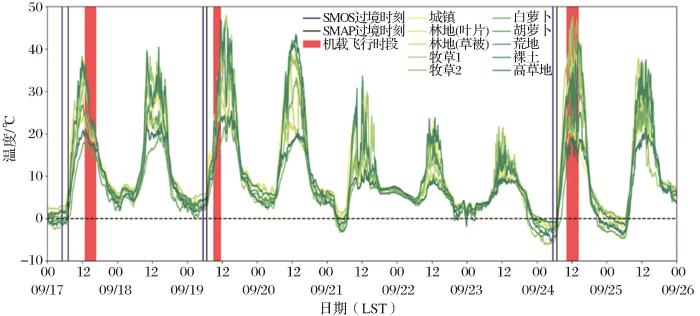
按照最小、平均、中值和最大值这4项指标,对机载和卫星亮温数值的总体统计如表3所示。初步来看,机载亮温的最小、平均和中值整体上低于卫星亮温,最大值与卫星亮温相当或略高。但由于在17日仅在32.5° 下匹配了SMOS亮温(表4),且其在19日出现了300 K以上的高值(最大值),因此,主要查看24日3种亮温的数值情况:与SMOS亮温相比,机载亮温的最小值较低,平均值与SMOS相当,中值和最大值稍有优势,二者总体上的差异不大;而与SMAP亮温相比,最小值的差异增大,平均和中值保持相当,但最大值差异明显。通过查看10站点地表温度实测数据,由图4中可见,机载飞行时段和卫星过境时刻的地表温差较大,这或可为解释二者亮温差异提供一定的辅助支持。
表4 卫星数据与机载数据的角度和极化方式的匹配
Table 4
| 卫星 | 日期/升降轨 | 角度/极化方式 | ||||
|---|---|---|---|---|---|---|
| 22.5° | 25° | 27.5° | 30° | 32.5° | ||
| SMOS | 17/A | - | - | - | - | HV |
| 19/A | HV | HV | HV | HV | HV | |
| 24/A | HV | HV | HV | HV | HV | |
| SMAP | 17/D | 40°HV | ||||
| 19/D | ||||||
| 24/D | ||||||
图4
仅针对19日和24日、在3种空间匹配方式、5种角度、H和V极化方式下进一步分析机、星亮温差异(剔除>300 K的样本)。按卫星减去机载的方式、以实际数值差为指标,分正、负分别统计二者的平均差值,结果列于表5,分4个组逐一讨论:
表5 卫星—机载之间的亮温差异
Table 5
| 亮温差/K | SMOS | SMAP | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 9月19日 | 9月24日 | 9月19日 | 9月24日 | ||||||||||||||
| H | V | H | V | H | V | H | V | ||||||||||
| 匹配方式 | 角度 | + | - | + | - | + | - | + | - | + | - | + | - | + | - | + | - |
| 面面未平均 | 22.5° | 59.18 | -12.91 | 38.06 | -3.20 | 15.34 | -9.38 | 12.06 | -25.95 | 8.43 | -12.40 | 9.83 | -3.47 | 5.71 | -12.35 | 7.16 | -2.80 |
| 25° | 21.93 | -10.35 | 33.88 | -11.50 | 8.54 | -5.37 | 12.54 | -14.23 | 9.16 | -11.32 | 10.04 | -4.14 | 5.47 | -11.95 | 6.99 | -3.25 | |
| 27.5° | 13.59 | -6.31 | 40.11 | -4.59 | 10.08 | -6.63 | 15.19 | -5.32 | 10.80 | -9.98 | 10.69 | -2.87 | 6.48 | -12.26 | 8.38 | -3.32 | |
| 30° | 14.53 | -10.15 | 41.16 | -0.97 | 12.07 | -6.89 | 10.17 | -6.83 | 10.82 | -7.36 | 11.13 | -4.70 | 7.07 | -8.48 | 5.64 | -4.91 | |
| 32.5° | 18.00 | -4.36 | 42.45 | -3.61 | 9.76 | -7.32 | 9.58 | -6.65 | 12.03 | -4.19 | 11.17 | -6.20 | 8.21 | -6.70 | 5.81 | -6.31 | |
| 总和 | 113.64 | -44.08 | 195.66 | -23.87 | 55.79 | -35.59 | 59.54 | -58.98 | 51.24 | -45.25 | 52.86 | -21.38 | 32.94 | -51.74 | 33.98 | -20.59 | |
| 面面平均 | 22.5° | 55.84 | -10.77 | 38.94 | -5.95 | 13.06 | -10.22 | 8.69 | -43.50 | 6.79 | -9.52 | 6.06 | -1.77 | - | -12.29 | 6.95 | -2.88 |
| 25° | 19.69 | -9.57 | 36.16 | -2.11 | 9.55 | -1.35 | 10.71 | -18.15 | 9.41 | -7.31 | 5.77 | -2.27 | 0.49 | -9.39 | 6.04 | -1.57 | |
| 27.5° | 13.88 | -5.44 | 41.52 | -0.76 | 9.80 | -8.88 | 13.79 | -8.29 | 4.37 | -6.15 | 7.37 | -0.20 | 7.14 | -9.48 | 7.55 | -1.25 | |
| 30° | 15.09 | -6.80 | 43.57 | - | 11.27 | -7.92 | 9.29 | -10.97 | 6.02 | -4.40 | 6.94 | -2.09 | 4.32 | -6.16 | 2.94 | -4.28 | |
| 32.5° | 20.72 | -0.74 | 46.04 | -3.26 | 9.95 | -7.22 | 10.28 | -7.15 | 8.05 | -1.73 | 7.14 | -1.79 | 7.72 | -4.02 | 8.21 | -4.35 | |
| 总和 | 125.22 | -33.32 | 206.23 | -12.08 | 53.63 | -35.59 | 52.76 | -88.06 | 34.64 | -29.11 | 33.28 | -8.12 | 19.67 | -41.34 | 31.69 | -14.33 | |
| 面面最邻近 | 22.5° | 64.92 | -11.73 | 40.66 | -4.71 | 13.96 | -11.07 | 12.15 | -41.55 | 9.91 | -10.83 | 12.83 | -2.41 | 0.98 | -14.39 | 7.14 | -0.64 |
| 25° | 21.12 | -14.47 | 33.23 | -2.69 | 10.80 | -3.37 | 11.28 | -15.47 | 7.62 | -9.89 | 15.47 | -2.50 | 1.12 | -11.44 | 6.29 | -1.63 | |
| 27.5° | 13.74 | -6.20 | 39.62 | -2.02 | 11.20 | -8.10 | 14.07 | -9.46 | 8.23 | -9.26 | 6.81 | -4.09 | 6.47 | -11.78 | 7.83 | - | |
| 30° | 13.55 | -11.35 | 41.41 | - | 13.10 | -8.58 | 10.31 | -9.62 | 13.46 | -7.73 | 5.68 | -6.20 | 8.11 | -6.74 | 4.50 | -5.30 | |
| 32.5° | 22.98 | -1.49 | 42.31 | -6.86 | 11.65 | -6.04 | 13.09 | -8.70 | 7.77 | -4.07 | 6.45 | -6.70 | 7.86 | -6.07 | 4.53 | -6.68 | |
| 总和 | 136.31 | -45.24 | 197.23 | -16.28 | 60.71 | -37.16 | 60.9 | -84.8 | 46.99 | -41.78 | 47.24 | -21.9 | 24.54 | -50.42 | 30.29 | -14.25 | |
(1)19日、SMOS-机载:5个角度下,H极化正差呈现为“先减-后增”的分布规律(除22.5°外),谷值位于27.5°,数值差约为14—23 K;H极化负差呈现为“先减—后增—再减”的总体下降型分布特征,两谷值分别位于27.5°和32.5°,数值差约为-14— -1 K;V极化正、负差的分布规律大致都为“先减—后增”,但谷值分别位于25°和30°,数值差分别约为33—46 K和-12—-1 K。
表4中19日SMOS亮温普遍高于机载亮温的状况在此得到了进一步的印证,H极化卫星亮温与机载亮温在22.5°下的悬殊差异值得关注。尽管V极化正差大致表现出对角度不敏感的特征,但由于数值普遍偏高,当日SMOS亮温观测“非正常”的嫌疑较大,故无法为证实机载亮温的可靠性提供支持。
(2)19日、SMAP-机载:在3种空间匹配方式下H极化正差的分布模式各有不同,数值差约为4—13 K;H极化负差则统一表现为“随角度增加而减小”的分布模式,数值差约为-12—-2 K;V极化正、负差未见明显规律,数值差分别约为6—15 K和-7—0 K。当日SMAP亮温较机载亮温总体高约10 K。值得注意的是H极化负差,由于SMAP是40°单角度观测,因此,这种“亮温差随角度递减”的模式与理论上亮温与角度的分布关系十分相符。
(3)24日、SMOS-机载:在3种空间匹配方式下H极化正差都展现出“先减—后增—再减”的总体下降型分布特征(同19日H-),数值差约为9—15 K,两谷值分别位于25°和32.5°;H极化负差约为-11—-3 K,尽管规律性不明显,但除22.5°和25°外,其他角度下的亮温差均较为接近;V极化正、负差值总体上分别为9—15 K和-44—-5 K,尽管也未展现出明显的规律性,但除22.5°和25°的V极化负差外,其他条件下的亮温差大致相当、随角度变化的幅度不大。由于SMOS亮温与机载亮温在角度上是相匹配的,二者各自应持有H、V极化亮温差异随角度增加而增大的特征,也就是说,机载和SMOS亮温差对角度不敏感是符合理论上亮温与角度分布关系的,能够在一定程度上可证实机载亮温可靠。
(4)24日、SMAP-机载:H极化正差没有明显的规律性,数值约为1—8 K;H极化负差数值约为 -14—-4 K,同样表现出“随角度增加而减小”的分布模式,再次印证了理论上亮温与角度的分布关系、符合预期;同时,机载亮温首次展现出高于卫星亮温的特征;V极化正、负差随角度增加而减小的分布规律不明朗,总体数值差分别约为3—8 K和-7— -1 K,卫星亮温仍略高于机载亮温。
尽管由图4可见机载飞行时段地表温度显著高于卫星过境时刻,但其亮温却未能显示出这一优势。导致这一状况的原因可能在于二者在时空尺度上的差别。首先,机、星平台高度差异巨大,卫星观测或受到更多的路程辐射影响,传感器入瞳处的亮温构成更复杂;其次,空间尺度上的差别也较大,机载观测单元在地表上的投影往往是卫星观测单元的很小一部分,再加之地表异质性的影响,在理论计算上的高值优势很可能在实际观测中被大大削弱;再者,机、星观测时间无法严格同步,综合试验过程中卫星的过境时间多为地表温湿状态较稳定的晨昏,而机载飞行多为日照条件较好的近中午,在地表异质性的基础上可能会叠加研究区内全域或局部的地-气环境差别,给亮温观测带来了不确定性。
4.2 尺度差异的量化影响
在对比亮温总体分布特征的基础上,仅针对24日,以相关系数(R)、无偏均方根误差(ubRMSE)为指标,分析不同空间匹配方式及各角度下机载与卫星亮温的差异,结果如图5—图7,可以发现:在3种空间匹配方式下,H和V极化亮温在数值空间的分异均随角度的增加趋于显著,与理论上极化亮温差异随角度增加而增大的分布特征相符;同时,机载和卫星亮温点对随角度增加逐渐靠近1∶1线、R逐渐增大、ubRMSE逐渐减小,特别是与SMAP相比,两个指标和点对分布趋势较为理想;在各组图-A中因SMOS亮温低值而导致的R和ubRMSE指标异常并未在与SMAP的对比中出现,在一定程度上表明了二者亮温的相似性以及机载亮温的可靠性。
图5
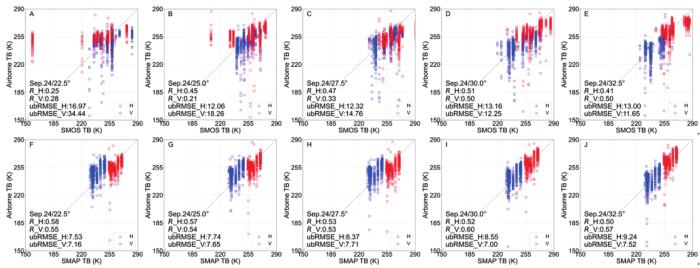
图5
SMOS、SMAP卫星大面元与机载小面元-未平均方式下的亮温比较
Fig.5
Satellite and Airborne brightness temperature comparison in pixel-pixel-multi
图6
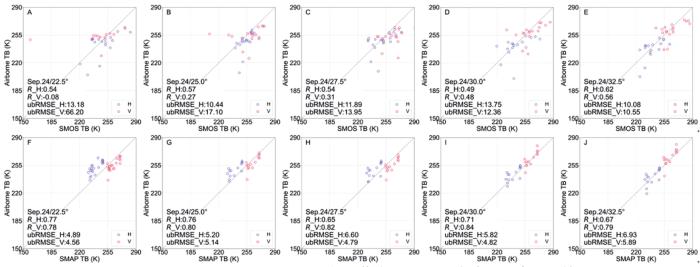
图6
SMOS、SMAP卫星大面元与机载小面元—平均方式下的亮温比较
Fig.6
Satellite and Airborne brightness temperature comparison in pixel-pixel-averaged
图7
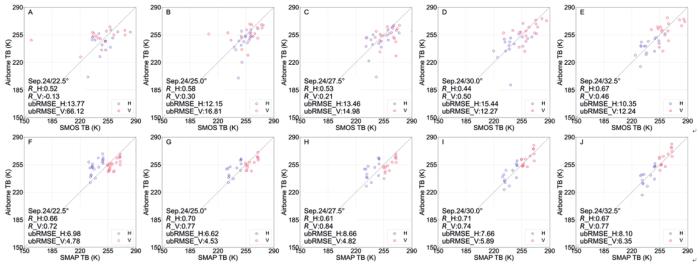
图7
SMOS、SMAP卫星大面元与机载小面元—最邻近方式下的亮温比较
Fig.7
Satellite and Airborne brightness temperature comparison in pixel-pixel-nearest
结合表5中的统计结果,可见机载亮温与SMOS和SMAP亮温在面面平均方式下的差值小于其他两种方式,因空间匹配方式所导致的累积差值见表5中的“总和”一栏,其量化影响可见一斑。实际上,这3种方式各有一定道理:卫星数据以格点中心亮温指代格点区域内总体亮温,将机载亮温匹配最邻近卫星亮温符合以机载为参照的观测对象一致性原则,但二者格点中心往往存在距离差异,加之面面最近邻匹配方式下的亮温差异是一种绝对差异,数值必然较大。而根据卫星格点范围圈定区域内所有机载格点,将未平均的多个机载小面元匹配单个卫星大面元使得机、星观测对象趋于一致,减弱了亮温的绝对差异,但由于以卫星为参照的观测范围较大,在面面未平均方式下地表异质性的影响开始显现。将卫星格点内多个机载亮温做平均处理在形式上可降低这种影响、进一步弱化亮温差异。但研究所采用的面面平均匹配方式与传统上“以少量点式采样表征区域总体”的方案有所不同,在于机载亮温被处理为空间连续的栅格数据,尽管其与卫星格点大小不同,但二者在空间上的重叠度较高,以平均代整体的方式也有一定的合理性,若能够进一步理解多成分地表亮温的构成机制,面面平均方式还可获得更多理论支持从而实现其计算方案的优化。
仅就面面平均方式下机载和卫星亮温的对比结果来看(图6),其与SMAP亮温的相关系数最高分别为0.77(R_H,22.5°)和0.84(R_V,30°),与SMOS亮温最高分别为0.62(R_H,32.5°)和0.56(R_V,32.5°);由此可见,机载亮温与卫星亮温的整体相似性较高,同时与SMAP的相似性好于与SMOS。其原因可能在于,首先,机载与SMAP都采用的是传统的单角度真实孔径探测方式,而SMOS则采用的是多角度综合孔径干涉探测方式,传感器硬件设计与实现不同;其次,机载亮温的空间离散方式与SMAP是相同格网体系,二者格点差异小于与SMOS之差;再者,机载飞行时段与SMAP的时间差小于与SMOS,相应的地表温度差也有减小(图4),进而缩小了亮温差。
本研究以SMOS和SMAP观测亮温为参照,在不同的空间匹配方式下研究了多观测角度下机载与卫星亮温的差异,初步分析了机载亮温的数值分布特征,为证实其可靠性提供了一定的理论依据。但由于机载与卫星传感器在硬件设计、观测实施条件、数据处理方法等诸多方面的不同,如何从微波辐射机理的角度进一步量化阐释二者亮温差异还需要持续、深入的研究。
5 结 论
以遥感的方式方法进行地球系统科学研究在一定程度上是按照模拟、观测、验证、校正这4个方面紧扣形成的闭环过程螺旋式推进的。开展机载观测与卫星观测的多方面比较是互印二者可靠性、实践后续卫星计划的必要基础,也是连通验证至校正的正向过程、推进校正至模拟和观测的反向过程的重要手段。
针对“碳循环、水循环和能量平衡遥感综合试验”中闪电河流域的L波段微波辐射计机载飞行试验,本研究展开了机载观测亮温与SMOS、SMAP卫星观测亮温的对比研究,根据观测时间、角度和极化方式制定机、星数据的选用与处理方法,进而针对二者空间尺度差异设计了3种匹配方案。以直接数值差异(卫星—机载)、相关系数(R)和无偏均方根误差(ubRMSE)作为评定亮温差异的量化指标,研究发现:
(1)机载亮温与SMOS亮温差随角度增加而变化的幅度不大、与SMAP亮温差随角度增加而减小,H、V极化亮温差异随角度增加而增大,总体上符合亮温与角度的理论分布关系,机载亮温的可靠性得到了初步印证。
(2)面面平均匹配方式下机、星总平均亮温差小于面面未平均和面面最邻近方式,空间匹配方式对多源、多尺度数据验证研究的量化影响得以证实。
(3)机载亮温与SMAP亮温的总体相关性高于与SMOS,其原因很可能在于二者的硬件探测方式和数据的空间组织方法有相似之处。
本研究对机载和卫星亮温数值差异的分析结果可为证实综合试验L波段微波辐射计的可靠性提供关键支持,空间匹配方式的设计和对比结果可为多源、多尺度数据的验证研究提供实践参考。但受数据条件的限制,研究中还存在一定的不足,主要表现为:机载飞行区域不大、次数不多,与卫星数据匹配的总样本量较小,机、星观测对比的可靠性有待判定;机载与卫星亮温的数值差异仍是形式化的,没能进行有关L波段微波辐射机理的研究,应借助本次试验的地面实测数据开展亮温模拟、土壤水分反演等定量研究;机载与卫星观测时间有一定差异,期间的日照、土壤水分、温度等环境要素可能有着较大变化,实现机、星的有效对比应设法消除这种时间差异影响;为保证机、星样本数量按照±0.5°区间选用SMOS多角度数据和不考虑角度直接选用SMAP数据,可能会给机、星对比带来一定的不确定性;机载和卫星观测的空间覆盖区域不一致,在本研究设计的3种空间匹配方式下二者的对比结果有着较大的差异,在尺度不同或空间套叠不完全的情况下如何实现机载与卫星的空间匹配,或是否需要统一进行尺度的划归,既是机、星微波遥感研究的核心问题也是难题,仍有待深入探索。
参考文献
Investigating soil moisture-climate interactions in a changing climate: A review
[J].
Response of soil moisture on climate characteristics based on SPI and SPEI in Loess region of Northern Shaanxi
[J].
Contributions of climate change and groundwater extraction to soil moisture trends
[J].
Predicting impacts of climate change on evapotranspiration and soil moisture for a site with sub-humid climate
[J].
Evolution of the ESA CCI soil moisture climate data records and their underlying merging methodology
[J].
A description and evaluation of US climate reference network standardized soil moisture dataset
[J].
Sensitivity of soil evapotranspiration to climate change in the permafrost area
[J].
多年冻土区土壤蒸散发对气候变化的敏感性分析
[J].
Overview of SMOS performance in terms of global soil moisture monitoring after six years in operation
[J].
ESA’s soil moisture and ocean salinity mission: from science to operational applications
[J].
Validation of SMAP surface soil moisture products with core validation sites
[J].
Assessment of the SMAP passive soil moisture product
[J].
Global-scale comparison of passive (SMOS) and active (ASCAT) satellite based microwave soil moisture retrievals with soil moisture simulations (MERRA-Land)
[J].
Comparison between SMOS, VUA, ASCAT, and ECMWF soil moisture products over four watersheds in U.S
.[J].
Comparison of surface soil moisture from SMOS satellite and ground measurements
[J].
SMOS soil moisture data validation in the Aurajoki watershed, Finland
[J].
Long-term SMOS soil moisture products: a comprehensive evaluation across scales and methods in the Duero Basin (Spain)
[J].
A regional scale performance evaluation of SMOS and ESA-CCI soil moisture products over India with simulated soil moisture from MERRA-Land
[J].
Validation study on SMOS L2 soil moisture product in agricultural area of China
[J].
SMOS L2土壤水分数据产品在我国农区的验证
[J].
Evaluation of satellite and reanalysis soil moisture products over Southwest China using ground-based measurements
[J].
Analysis of ASCAT, SMOS, in-situ and land model soil moisture as a regionalized variable over Europe and North Africa
[J].
SMOS soil moisture product evaluation over West-Africa from local to regional scale
[J].
Comparative study of soil moisture estimations from SMOS satellite mission, GLDAS database, and cosmic-ray neutrons measurements at COSMOS station in Eastern Poland
[J].
The global SMOS Level 3 daily soil moisture and brightness temperature maps
[J].
Validation of SMOS soil moisture products on different vegetation types in Qilian Mountain
[J].
祁连山区不同植被类型上的SMOS遥感土壤水分产品质量评估
[J].
SMOS near-real-time soil moisture product: processor overview and first validation results
[J].
Global-scale evaluation of SMAP, SMOS and ASCAT soil moisture products using triple collocation
[J].
Evaluation of the SMOS and SMAP soil moisture products under different vegetation types against two sparse in situ networks over arid mountainous watersheds, Northwest China
[J].
Satellite surface soil moisture from SMAP, SMOS, AMSR2 and ESA CCI: a comprehensive assessment using global ground-based observations
[J].
Assessment and inter-comparison of recently developed/reprocessed microwave satellite soil moisture products using ISMN ground-based measurements
[J].
The SMOS soil moisture retrieval algorithm
[J].
Modelling the passive microwave signature from land surfaces: A review of recent results and application to the L-band SMOS & SMAP soil moisture retrieval algorithms
[J].
Recent advances of L-band application in the passive microwave remote sensing of soil moisture and its prospects
[J].
被动微波反演土壤水分的L波段新发展及未来展望
[J].
On the airborne spatial coverage requirement for microwave satellite validation
[J].
Evaluation of SMAP downscaled brightness temperature using SMAPEx-4/5 airborne observations
[J].
A first assessment of the SMOS data in Southwestern France using in situ and airborne soil moisture estimates: The CAROLS airborne campaign
[J].
Validation of SMOS brightness temperatures during the HOBE airborne campaign, Western Denmark
[J].
Uncertainty assessment of the SMOS validation in the upper danube catchment
[J].
Canadian experiment for soil moisture in 2010 (CanEx-SM10): Overview and preliminary results
[J].
China
[J]. Advances in Earth Science,
联合机载PLMR微波辐射计和MODIS产品反演黑河中游张掖绿洲土壤水分研究
[J].
Tests of the SMAP combined radar and radiometer algorithm using airborne field campaign observations and simulated cata
[J].
Investigation of SMAP fusion algorithms with airborne active and passive L-band microwave remote sensing
[J].
Comparison of airborne Passive and Active L-band System (PALS) brightness temperature measurements to SMOS observations during the SMAP validation experiment 2012 (SMAPVEX12)
[J].
Comparison of high-re-solution airborne soil moisture retrievals to SMAP soil moisture during the SMAP validation experiment 2016 (SMAPVEX16)
[J].
Soil moisture experiment in the Luan River supporting new satellite mission opportunities
[J].
SMOS: The payload
[J].
The SMOS mission: New tool for monitoring key elements of the global water cycle
[J].
Refinement of SMOS multiangular brightness temperature toward soil moisture retrieval and its analysis over reference targets
[J].
The soil moisture Active/Passive Mission (SMAP)
[J].
SMAP L-band microwave radiometer: RFI mitigation prelaunch analysis and first year on-orbit observations
[J].
Soil moisture retrievals using L-band radiometry from variable angular ground-based and airborne observations
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}