1 引 言
树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] 。目前,单木树高测量主要有传统地面测量调查和遥感估测两类。传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差。目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展。近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用。
目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] 。基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高。树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] 。刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高。白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分。汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测。王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中。综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性。
采用大疆“御”Mavic专业版小型消费级无人机,以高校校区为研究区,通过倾斜测量技术获取多角度影像,提取测区冠层高度模型(CHM),分别采用GIS矩形邻域分析、GIS圆形邻域分析和局部最大值算法提取树顶点,获取树高,探讨不同窗口大小和不同林分郁闭度对树顶点提取精度的影响,并与实测结果进行精度验证,验证基于无人机影像提取树高的可行性,为不同郁闭度阔叶林单木树高估算提供方法借鉴。
2 研究区与数据预处理
2.1 研究区概况
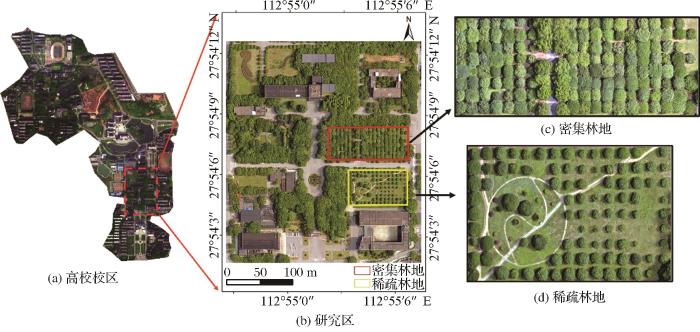
研究区位于湖南科技大学南校区,地理范围112°54′57″~112°55′6″ E,27°54′3″~27°54′12″ N,测区地势较为平坦,建筑物较多,植被种类丰富,林层结构复杂,为了有效验证树顶点的提取精度,本文根据郁闭度差异选取了2块阔叶林样地,主要树种为桂树,其中密集林地分布紧簇,树冠间有遮挡,见图1 (c);稀疏林地分布规则,树冠间不相连,视线通透,见图1 (d)。
图1
图1
研究区分布图
Fig.1
Distribution of study area
2.2 数据采集
测区倾斜摄影数据获取时间为2021年6月,采用大疆“御”Mavic专业版无人机,该无人机体积小,重量轻,最大续航里程为18 km。无人机搭载哈苏L1D-20C相机,有效像素2 000万,最大相片尺寸为5 472×3 648,等效焦距28 mm。采集影像选择在天气晴朗,无风的情况,在航摄前首先进行航线规划,根据精度要求确定地面分辨率优于2.5 cm,利用飞行航高与分辨率之间的关系,由公式H =f× GSD/a (H 为相对航高,f 为焦距,a 为像元尺寸,GSD为地面分辨率)可以计算相对航高。设置航向重叠度、旁向重叠度均高于80%。然后布设像控点,利用RTK技术测量控制点坐标,误差控制在2 cm以内。本次飞行分为2次,分别获取正射影像206张,75°影像999张。此外,实验采集了研究区野外样地数据,包括树木位置、树高及冠径。树木位置使用RTK测量获取。以无人机正射影像(空间分辨率为2.461 cm)为参考底图,野外实测树木分布点位如图2 所示,图3 为样地树木位置和树高采集。
图2
图2
野外实测树木分布图
Fig.2
Distribution field measured tree
图3
图3
野外样地数据采集
Fig.3
Field site data acquisition
2.3 无人机影像预处理
实验采用Contenxt Capture Center软件处理影像数据,这款软件自动化程度高,具有较好的相机自检校功能,兼容多种数据源,支持输出多种数据格式。软件处理步骤主要包括:①数据预处理,对影像数据手工整理,删除曝光严重、色彩不均等有问题的照片。②空三处理,恢复相机姿态,通过影像特征匹配算法匹配同名点,导入控制点坐标并至少在两张以上的照片上刺点,然后进行光束法区域网平差。③重建产品,软件基于图形运算单元,采用多视角影像匹配技术[23 ]. 提取更多特征点。在这一步操作中,可以根据自己的要求输出不同类型和格式的数据。
3 研究方法
3.1 技术路线
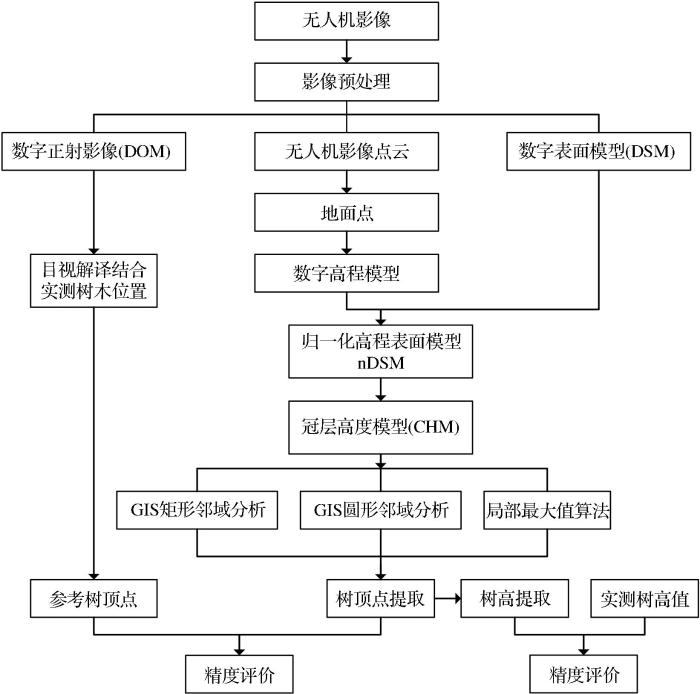
利用无人机获取测区可见光影像,采用Contenxt Capture Center进行影像预处理,分别利用GIS矩形邻域分析、GIS圆形邻域分析、固定窗口局部最大值法提取树顶点,探讨不同窗口大小和林分郁闭度对树顶点提取精度的影响。最后基于树顶点对应的树高提取结果,采用树高实测值对比分析树高提取精度,其技术路线如图4 所示。
图4
图4
技术路线
Fig.4
Technical route
3.2 冠层高度模型获取
3.2.1 点云过滤
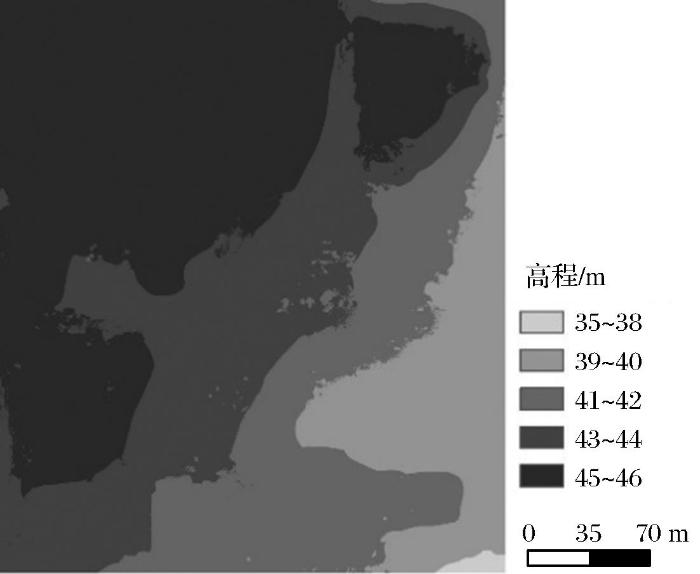
无人机影像经过空三测量和密集匹配后可以输出具有三维坐标、颜色信息的三维点云。不仅包括了地面点,还有测区建筑物、植被等非地面点。点云过滤是为了剔除非地面点,得到测区数字高程模型(DEM)。当前主流的点云过滤算法主要包括坡度法[24 ] 、数学形态法[25 ] 、渐进加密三角网滤波算法[26 ] 等。这些算法参数设置较多,需要根据经验判断设置阈值,而且针对不同地形会有不同过滤效果。Zhang[27 ] 等提出的布料模拟过滤算法将点云翻转,定义一种布料覆盖其上,通过分析布料节点与点云的相互作用,使用高程阈值分离地面点和非地面点。该算法不需要过多的参数设置,而且针对小范围、地形较平坦的区域过滤效果较好[28 ] 。因此本研究选择该算法用于无人机影像点云过滤,对滤波后的地面点采用自然邻域法插值生成DEM(分辨率为2.4 cm),如图5 所示。
图5
图5
数字高程模型
Fig.5
Digital elevation model
3.2.2 归一化表面模型
由数字表面模型(DSM)和数字高程模型(DEM)做差值得到归一化数字表面模型(nDSM)。其目的是为了消除地形影响,得到测区地物高度信息。利用ArcGIS栅格计算器获取nDSM,采用重分类和掩模分析剔除低于1.5 m的地物。
考虑测区建筑物较多,需要消除建筑物干扰,本文利用汪小钦等[29 ] 提出的基于可见光波段差异植被指数(VDVI)区分植被和非植被。公式如下:
V D V I = 2 * ρ g r e e n - ρ r e d - ρ b l u e 2 * ρ g r e e n + ρ r e d + ρ b l u e (1)
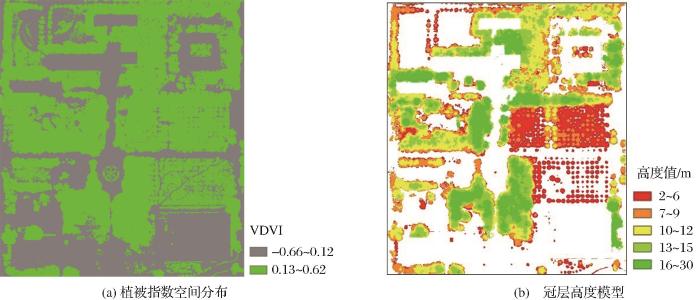
其中:ρgreen 为绿光波段;ρred 为红光波段;ρblue 为蓝光波段,VDVI数值范围为[-0.6,0.6]。实验利用双峰直方图阈值确定法,选择两个波峰间明显的峰谷为阈值,VDVI大于0.12的设定为植被,小于0.12的为非植被。得到测区植被指数空间分布,结果如图6 (a)所示。根据VDVI重分类结果,使用掩模提取测区冠层高度模型(CHM),结果如图6 (b)所示。
图6
图6
冠层高度模型获取
Fig.6
Canopy height model acquisition
3.3 树顶点提取
3.3.1 GIS邻域分析
通过对冠层高度模型进行GIS邻域分析得到。利用空间分析中邻域分析的功能,在重叠邻域类型的运算中,对栅格影像中的每个像元进行遍历,统计指定邻域中的最大值,即统计生成的值会赋予指定邻域轮廓中待处理的所有像元。统计影像输出前后差值为0的像元,将影像重分类、栅格转点,转换成矢量数据。为了分析不同邻域类型对树顶点提取的影响,本文分别选用了矩形、圆形(如图7 )这两种邻域统计像元及指定邻域窗口中所有像元的值。(图7 中矩形邻域、圆形邻域为5×5的窗口。)
图7
图7
GIS邻域分析
Fig.7
GIS neighborhood analysis
3.3.2 局部最大值法
局部最大值算法主要有两种,固定窗口的局部最大值[30 -31 ] 、动态窗口的局部最大值[32 -33 ] 。动态窗口的局部最大值需要分析树高和冠幅的关系,适合树高和冠幅相关系较好的林木,且需要的样本数量多,不同树种需构建不同的方程,目前主要应用在针叶林单木参数提取研究中[34 -35 ] 。所以实验采用固定窗口局部最大值法,该算法为:①利用Geotiffread函数读取冠层高度模型栅格影像信息;②使用Circshift函数进行循环移位,调节影像灰度值附近指定窗口大小;③比较固定窗口大小内的所有值,记录局部最大值,输出为1;④利用find函数记录值为1的行列号,并转变成地理坐标,则为提取的树顶点坐标。
3.4 精度评价
3.4.1 树顶点提取精度评价
本文评价树顶点提取精度主要从单木尺度进行分析。单木尺度评价是基于正射影像图,建立以实测树点位为圆心,半径1m的圆形缓冲区,在其缓冲区内有且只有一个树顶点,则为正确提取;如果不存在,则为漏提;若存在两个或两个以上的顶点,则判断最近的那个为正确,其余为错误;本文使用统计学中的召回率、准确率和F 测度对树顶点提取结果进行单木尺度的评价,计算公式如下:
R = T P / T P + F N * 100 % P = T P / T P + F P * 100 % F = 2 R P / R + P * 100 % (2)
其中:TP为正确提取树顶点个数;FP为错误提取树顶点个数;FN为遗漏树顶点个数。R 为召回率,表示正确提取树顶点占实地调查树顶点个数的比例;P 为准确率,表示正确提取树顶点占的比例。F 测度是对召回率与准确率的综合评价,召回率与准确率越高,F 测度越高,代表结果越好。
3.4.2 树高提取精度评价
为验证本文方法提取树高的可行性,使用均方根误差(RMSE)和相对均方根误差(rRMSE)评价树高提取精度,计算公式如式(3),值越小表示提取树高越接近真实值。实验数据处理流程如图7 所示。
R M S E = ∑ 1 n h i - H i 2 n 2 r R M S E = 100 * R M S E H ¯ (3)
式中:hi 表示提取树高值,Hi 表示实测树高值,H ¯ n 表示测区树木个数。
4 结果与分析
4.1 数字高程模型精度分析
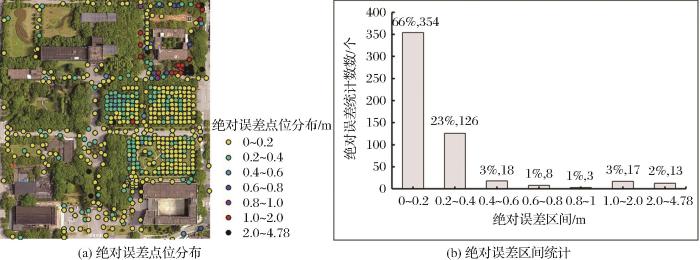
数字高程模型是影响树高提取精度的要素之一,因此有必要分析布料模拟过滤算法结合自然邻域法插值生成数字高程模型的精度。实验利用实测地面点高程,采用平均误差(ME)、均方根误差(RMSE)、预测吻合度(R 2 )来评价DEM精度[36 ]. 公式如(4)所示,绝对误差点位分布如8(a),绝对误差区间分布如图8 (b)所示。
图8
图8
数字高程模型误差分布
Fig.8
Error distribution of digital elevation model
M E = 1 n ∑ i = 1 n Z i - z i R M S E = 1 n ∑ i = 1 n Z i - z i 2 2 R 2 = 1 - ∑ i = 1 n Z i - z i 2 ∑ i = 1 n Z i - z ¯ i 2 (4)
其中:Z i z i n 为实测地面点个数;z ¯ i 图8 可以看出绝对误差在60 cm以下的地面点占到92%,且密集林地和稀疏林地这两块区域的地面点绝对误差绝大多数都在20 cm以内。利用公式(4)计算可得出ME为0.28 m,RMSE为0.58 m,R 2 为0.87,且测区密集林地和稀疏林地地面点平均误差分别为0.19 m和0.15 m。
4.2 单木尺度树顶点提取精度分析
根据公式(2)计算了3种树顶点提取方法在不同窗口大小、林分郁闭度统计下的R (召回率),P (正确率),F 测度。GIS矩形邻域分析、GIS圆形邻域分析、固定窗口局部最大值法提取树顶点的召回率均随着窗口大小的增加呈下降趋势,正确率呈上升趋势。考虑召回率、正确率主要是衡量提取的正确树顶点分别占参考树顶点和提取树顶点的比例,而F测度则综合考虑了两者的关系,更能体现树顶点提取精度。
图9 为密集林地、稀疏林地的F 测度统计图,结果表明:①GIS矩形邻域分析、局部最大值算法、GIS圆形邻域分析在密集林地统计的F测度范围分别为29.67%~78.13%、29.7%~77.78%、21.48%~76.78%;在稀疏林地中为41.70%~96.94%、40.66%~96.00%、25.36%~96.94%。②通过计算不同窗口大小下,密集林地和稀疏林地3种树顶点提取方法F测度值的方差,其GIS矩形邻域分析为0.03、0.03,局部最大值法为0.03、0.03,GIS圆形邻域分析为0.04、0.05可知,在不同林分郁闭度、窗口大小下,GIS矩形邻域分析法和局部最大值算法得到的F测度值较GIS圆形邻域分析波动较小,表明GIS圆形邻域分析提取树顶点的精度不稳定。③从密集林地的F 测度分布可以看出,3种树顶点提取方法随着窗口大小的增加,F 测度服从先增后减的趋势,且GIS矩形邻域分析的F 测度最高,其值为78.13%,即树顶点提取精度最高;而在稀疏林地,由于其树木间隔大,窗口大小的增加虽提高了树顶点提取的正确率,但对召回率影响较小,导致F测度值变化趋势规律较密集林地不太明显,且GIS矩形邻域的F测度值最高,其值为96.94%。
图9
图9
F测度统计图
Fig.9
F statistical figure
表1 为基于GIS矩形邻域分析、GIS圆形邻域分析、局部最大值算法在密集林地采用13×13窗口和在稀疏林地采用17×17窗口大小下树顶点提取统计结果。图10 为单木尺度树顶点提取精度评价最高(即F 测度值最大),GIS矩形邻域分析在密集林地采用13×13窗口提取到的树顶点,在稀疏林地采用17×17窗口提取到的树顶点,其中密集林地提取树顶点166个,正确提取125个,错误41个,遗漏29个;稀疏林地提取树顶点98个,正确95个,错误3个,遗漏3个。
图10
图10
GIS矩形邻域分析树顶点提取结果
Fig.10
GIS rectangular neighborhood analysis tree vertex extraction results
4.3 树高精度分析
基于CHM对应提取树高,由于树顶点提取存在错提、漏提的情况,因此本文采用单木尺度精度评价中F 测度最高的GIS矩形邻域分析法,即在密集林地采用13×13窗口提取的125个正确树顶点,在稀疏林地采用17×17窗口提取的95个正确树顶点,与实测树高值做树高精度分析。
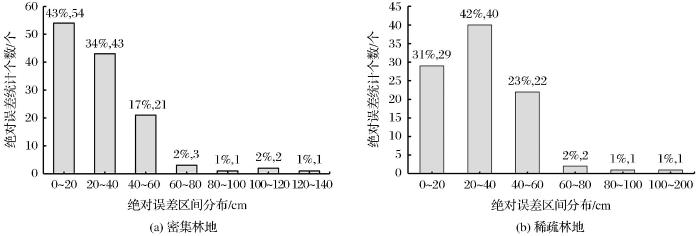
由表2 可知,密集林地树高最大误差为1.35 m,最小误差为-0.56 m;稀疏林地树高的最大误差为1.89 m,最小误差为-0.58 m。图11 为密集林地和稀疏林地提取树高与实测值的绝对误差统计,其密集林地提取树高与实测值的绝对误差在60 cm以下的占到94%,稀疏林地绝对误差在60 cm以下的占到90%。
图11
图11
树高实测值与提取值的绝对误差统计
Fig.11
Absolute error statistics of measured and extracted tree height values
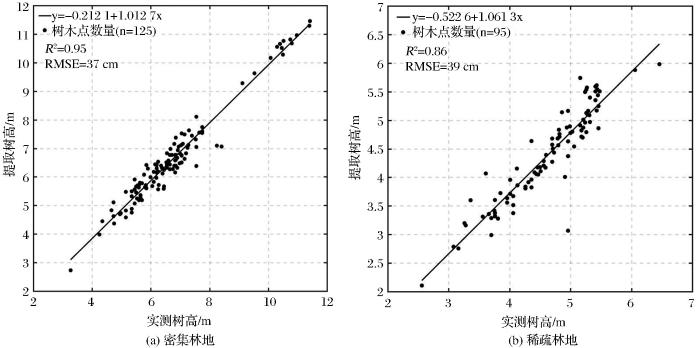
图12 为以树高实测值为自变量,提取值为因变量建立的回归关系,可以看出实测树高与提取树高有着较好的线性关系,其密集林地线性回归方程y=-0.212 1+1.012 7x,决定系数R 2 =0.954 4;稀疏林地线性回归方程y=-0.522 6+1.061 3x,决定系数R 2 =0.856 4,由公式(3)计算可得,密集林地、稀疏林地的RMSE分别为37 cm、39 cm,rRMSE分别为4.88%、8.52%。结果表明,基于CHM结合GIS矩形邻域分析提取树高可以获得相关性较好、精度较高的单木树高。
图12
图12
实测树高与提取树高回归关系
Fig.12
Regression relationship between measured tree height and extracted tree height
5 结论与讨论
5.1 结论
本文以高校校区人工林为研究对象,基于布料模拟过滤算法和可见光植被指数获取CHM,对采用GIS矩形邻域分析、GIS圆形邻域分析和局部最大值算法提取树顶点和树高的方法进行了研究,结果表明:
(1)无人机影像点云获取会受到树冠遮挡的影响,导致地面点损失,降低树高提取精度。目前已有的研究中对于DEM的生成并没有过多论述,因此有必要分析DEM的生产精度。利用地面实测高程,比较分析了采用布料模拟过滤算法结合自然邻域插值法得到的数字高程模型(DEM)精度,计算出ME为28 cm,RMSE为58 cm,R 2 为0.87,且密集林地和稀疏林地的地面平均高程误差分别为19 cm和15 cm,验证了无人机影像点云获取数字高程模型是可行的。
(2)在不同林分郁闭度、窗口大小下,GIS矩形邻域分析和局部最大值算法提取树顶点较GIS圆形邻域分析要更稳定,F测度值的方差更低;林分郁闭度、窗口大小是影响树顶点提取的重要因素,且GIS矩形邻域分析、局部最大值算法和GIS圆形邻域分析在密集林地的F测度范围分别为29.67%~78.13%、29.7%~77.78%、21.48%~76.78%。稀疏林地的F测度分别为41.70%~96.94%、40.66%~96.00%、25.36%~96.94%。随着窗口大小的增加,这3种方法在密集林地的F测度值呈现为先增后减的趋势。且GIS矩形邻域分析法树顶提取精度最高,其在密集林地、稀疏林地的F测度值分别为78.13%、96.94%。
(3)基于树顶点在CHM上对应的提取树高,通过与实测树高值对比发现,稀疏林地的决定系数R 2 为0.856 4,均方根误差为39 cm,相对均方根误差8.52%,提取的平均树高为4.38 m,野外实测平均树高为4.62 m,树高提取精度为94.8%;密集林地的决定系数R 2 为0.954 4,均方根误差为37 cm,相对均方根误差4.88%,提取的平均树高为7.36 m,野外实测平均树高为7.50 m,树高提取精度为98%。
5.2 讨论
目前基于无人机遥感技术估测树高也有学者做了相关研究,陈周娟等[37 ] 采用无人机倾斜测量技术提取阔叶林树高RMSE为1.91 m,R 2 达到了0.99。杜意鸿等[38 ] 利用倾斜测量技术提取油松树高,研究表明局部最大值算法结合分水岭算法、均值漂移算法基于0.5 m相片分辨率得到的单木树高平均误差最小,分别为42 cm和66 cm。高飞等[39 ] 采用无人机高分影像提取的陕北人工林树高与实测值之间有明显的线性关系,R 2 为0.80。刘浩然等[40 ] 基于无人机激光雷达技术对哈尔滨城市林业示范基地提取水曲柳树高的R 2 为0.86,RMSE为49 cm;樟子松树高的R 2 为0.84,RMSE为40 cm。赵晨阳等[41 ] 以长春净月谭为实验区,采用机载LiDAR数据估测落叶松树高,其相关系数R 2 为0.892 4,平均相对误差为-2.54%。实验采用了两块阔叶林样地,且研究区存在部分空地,提供了一定的地面条件,生成的DEM精度较高,有利于提高树高估测精度,将本文树高提取结果与上述研究结果进行比较,证明了基于小型无人机可见光遥感提取不同郁闭度阔叶林树高是可行的。
小型消费级无人机提取树高既具有工作效率、采集周期、成本上的优势,与实测数据相比,又达到了预期的精度,试验结果证明了小型无人机提取树高的可行性,为无人机倾斜摄影测量技术在林业资源调查中的推广以及基于倾斜影像提取较高郁闭度阔叶林分单木参数提供方法支撑。但研究也存在不足,需要进一步改善:
(1)研究区地形较平坦,测区存在部分空地,提供了一定的地面条件,DEM精度较高,有利于树高提取,而相对于地形起伏较大、高郁闭度的林分,无人机影像点云无法提供较为准确的林下地形信息,且不同点云过滤算法针对不同地形会有不同表现,因此需要探索点云过滤算法的适用性,并采用无人机激光雷达和摄影测量结合的方式,弥补单一测量方式的不足,以获取更高的地面精度。
(2)测区树种单一,树木分布较规整,固定窗口大小的矩形窗口单木识别结果较高,但需要确定最优窗口,自适应动态窗口虽在一定程度上提高了单木识别准确率,但并不适用于所有林分,故单木识别算法需要不断改进,把关注焦点由较规则阔叶林转移到较复杂的阔叶林甚至针阔混交林,进一步研究复杂林分下单木参数提取的方法与精度,以适应未来更高效、精确的林业资源调查需求。
参考文献
View Option
[1]
WANG Juan CHEN Yongfu CHEN Qiao et al Research on forest parameter information extraction progress driven by UAV remote sensing technology
[J]. Forest Resource Mangement ,2020 (5 ):144 -151 .
[本文引用: 1]
王娟 , 陈永富 , 陈巧 , 等 基于无人机遥感的森林参数信息提取研究进展
[J].林业资源管理 ,2020 (5 ):144 -151 .
[本文引用: 1]
[2]
HOU Hongya WANG Lihai XU Huadong et al Error analysis of tree height estimation based on eye measurement
[J]. Forest Engineering ,2012 ,28 (2 ):6 -8 .
[本文引用: 1]
侯红亚 , 王立海 , 徐华东 , 等 目测法估测树高的误差分析
[J].森林工程 ,2012 ,28 (2 ):6 -8 .
[本文引用: 1]
[3]
FENG Zhongke SUI Hongda DENG Xiangrui et al Survey and precision analysis of tree height by trigonometric leveling
[J]. Journal of Beijing Forestry University ,2007 ,29 (S2 ):31 -35 .
[本文引用: 1]
冯仲科 ,隋宏大 ,邓向瑞 ,等 三角高程法树高测量与精度分析
[J].北京林业大学学报 ,2007 ,29 ():31 -35 .
[本文引用: 1]
[4]
LUO Yubo HUANG Hongyu TANG Liyu et al Tree height and diameter extraction with 3D reconstruction in a forest based on TLS
[J]. Remote Sensing Technology and Application ,2019 ,34 (2 ):243 -252 .
[本文引用: 1]
骆钰波 , 黄洪宇 , 唐丽玉 , 等 基于地面激光雷达点云数据的森林树高、胸径自动提取与三维重建
[J].遥感技术与应用 ,2019 ,34 (2 ):243 -252 .
[本文引用: 1]
[5]
WU Bin YU Bailang YUE Wenhui et al Method for identifying individual street trees from the cloud data of the vehicle-borne laser scanning points
[J]. Journal of East China Normal University(Natural Science) ,2013 (2 ):38 -49 .
[本文引用: 1]
吴宾 , 余柏蒗 , 岳文辉 , 等 一种基于车载激光扫描点云数据的单株行道树信息提取方法
[J].华东师范大学学报(自然科学版) ,2013 (2 ):38 -49 .
[本文引用: 1]
[6]
BIAN Rui NIAN Yanyun GOU Xiaohua Analysis of forest canopy height based on UAV LiDAR: A case study of picea crassifolia in the east and central of the Qilian mountains
[J]. Remote Sensing Technology and Application ,2021 ,36 (3 ):511 -520 .
[本文引用: 1]
边瑞 , 年雁云 , 勾晓华 , 等 基于无人机激光雷达的森林冠层高度分析——以祁连山东、中部青海云杉为例
[J].遥感技术与应用 ,2021 ,36 (3 ):511 -520 .
[本文引用: 1]
[7]
HU Tianqin WANG Zhenxi HAO Kangdi et al Extraction of individual tree height using WorldView-3 remote sensing images and airborne LiDAR
[J]. Journal of Arid Land Resources and Environment ,2022 ,36 (10 ):166 -175 .
[本文引用: 1]
胡天祺 , 王振锡 , 郝康迪 , 等 基于WorldView-3遥感影像与机载LiDAR的单木树高提取
[J].干旱区资源与环境 ,2022 ,36 (10 ):166 -175 .
[本文引用: 1]
[8]
ZHOU Ye LIU Yunbo ZHENG Libo et al Precision analysis of single tree parameter extraction for multi-platform point cloud data
[J]. Bulletin of Surveying and Mapping ,2022 (7 ):168 -172 .
[本文引用: 1]
周烨 , 刘云波 , 郑丽波 , 等 多平台点云数据的单木参数提取精度分析
[J].测绘通报 ,2022 (7 ):168 -172 .
[本文引用: 1]
[9]
HAO Zhengbang LIN Lili YU Kunyong et al Remote sensing estimation of stand parameters in a new chinese fir plantation from UAV three-dimensional information
[J]. Journal of Southwest Forestry University(Natural Science) ,2023 ,43 (1 ):108 -116 .
[本文引用: 1]
郝振帮 , 林丽丽 ,余坤勇 , 等 基于无人机三维信息的杉木新造林林分参数遥感估测研究
[J].西南林业大学学报(自然科学版) ,2023 ,43 (1 ):108 -116 .
[本文引用: 1]
[10]
LIU He GU Lingjia REN Duanzhi Research progress of forest parameter acquisition based on UAV remote sensing technology
[J]. Remote Sensing Technology and Application ,2021 ,36 (3 ):489 -501 .
[本文引用: 1]
刘鹤 , 顾玲嘉 , 任瑞治 基于无人机遥感技术的森林参数获取研究进展
[J].遥感技术与应用 ,2021 ,36 (3 ):489 -501 .
[本文引用: 1]
[11]
YANG Kun ZHAO Yanling ZHANG Jianyong et al Tree height extraction using high-resolution imagery acquired from an from an Unmanned Aerial Vehicle (UAV)
[J]. Journal of Beijing Forestry University ,2017 ,39 (8 ):17 -23 .
[本文引用: 1]
杨坤 , 赵艳玲 , 张建勇 , 等 利用无人机高分辨率影像进行树木高度提取
[J].北京林业大学学报 ,2017 ,39 (8 ):17 -23 .
[本文引用: 1]
[12]
Jincheng LÜ WANG Zhenxi YANG Yongqiang et al Height extraction and growing stock inversion of picea schrenkianavar.tianshanica in Tianshan mountain based on UAV image
[J]. Xinjiang Agricultural Sciences ,2021 ,58 (10 ):1838 -1845 .
[本文引用: 1]
吕金城 , 王振锡 , 杨勇强 , 等 基于无人机影像的天山云杉林树高提取及蓄积量的反演
[J].新疆农业科学 ,2021 ,58 (10 ):1838 -1845 .
[本文引用: 1]
[13]
ZHAO Yizhan ZHOU Lü PAN Yuanjin et al Accuracy verification of danger tree monitoring for general consumer UAV
[J]. Bulletin of Surveying and Mapping ,2021 (S1 ):159 -164 .
[本文引用: 1]
赵一展 , 周吕 , 潘元进 , 等 一般消费级无人机的树障监测精度验证
[J].测绘通报 ,2021 ():159 -164 .
[本文引用: 1]
[14]
XIE Qiaoya YU Kunyong DENG Yangbo et al Height measurement of cunninghamia lanceolata plantations based on UAV remote sensing
[J]. Journal of Zhejiang A & F University ,2019 ,36 (2 ):335 -342 .
[本文引用: 1]
谢巧雅 , 余坤勇 , 邓洋波 , 等 杉木人工林冠层高度无人机遥感估测
[J].浙江农林大学学报 ,2019 ,36 (2 ):335 -342 .
[本文引用: 1]
[15]
ZHANG Haiqing LI Xiangxin WANG Cheng et al Individual tree height extraction from airborne LiDAR data by combining individual tree height with DSM
[J]. Journal of Geo-Information Science ,2021 ,23 (10 ):1873 -1881 .
[本文引用: 1]
张海清 , 李向新 , 王成 , 等 结合DSM的机载LiDAR单木树高提取研究
[J].地球信息科学学报 ,2021 ,23 (10 ):1873 -1881 .
[本文引用: 1]
[16]
ZHOU Xiaocheng LIAO Hongyan CUI Yajun et al UAV remote sensing estimation of three-dimensional green volume inlandscaping:A case study in the Qishang campus of Fuzhou university
[J]. Journal of Fuzhou University(Natural Science Edition) ,2020 ,48 (6 ):699 -705 .
周小成 , 廖鸿燕 , 崔雅君 , 等 无人机遥感估算绿化园林三维绿量——以福州大学旗山校区为例
[J].福州大学学报(自然科学版) ,2020 ,48 (6 ):699 -705 .
[17]
GUO Yangguang XIA Kai YANG Yinhui et al Research on single tree detection and crown diameter and tree height extraction of pecan forest based on UAV images
[J]. Journal of Forestry Engineering ,2023 ,8 (4 ):159 -166 .
郭阳光 , 夏凯 , 杨垠辉 , 等 基于无人机影像的山核桃单木检测及冠幅与树高的提取
[J].林业工程学报 ,2023 ,8 (4 ):159 -166 .
[18]
ZHANG Xiang LIU Yang YU Shan et al Research on extraction method of forest tree height based on Unmanned Aerial Vehicle LiDAR and multispectral data
[J]. Forest Engineering ,2023 ,39 (1 ):29 -36 .
[本文引用: 1]
张翔 , 刘洋 , 玉山 , 等 基于无人机激光雷达和多光谱数据的森林树高提取方法研究
[J].森林工程 ,2023 ,39 (1 ):29 -36 .
[本文引用: 1]
[19]
LIU Jiangjun GAO Haili FANG Luming et al Tree ertex and height extraction based on UAV imagery and analysis on its influencing factors
[J]. Forest Resource Mangement ,2019 (4 ):107 -116 .
[本文引用: 1]
刘江俊 , 高海力 , 方陆明 , 等 基于无人机影像的树顶点和树高提取及其影响因素分析
[J].林业资源管理 ,2019 (4 ):107 -116 .
[本文引用: 1]
[20]
BAI Mingxiong ZHANG Chao CHEN Qi et al Study on the extraction of individual tree height based on UAV visual spectrum remote sensing
[J]. Forest Resource Mangement ,2021 (1 ):164 -172 .
[本文引用: 1]
白明雄 , 张超 , 陈棋 , 等 基于无人机可见光遥感的单木树高提取方法研究
[J].林业资源管理 ,2021 (1 ):164 -172 .
[本文引用: 1]
[21]
WANG Lin LI Mingyang FANG Zihan et al Plantation forest parameter estimation based on UAV data
[J]. Forest Resource Mangement ,2019 (5 ):61 -67 .
[本文引用: 1]
汪霖 , 李明阳 , 方子涵 , 等 基于无人机数据的人工林森林参数估测
[J].林业资源管理 ,2019 (5 ):61 -67 .
[本文引用: 1]
[22]
WANG Bin SUN Hu XU Qian et al Height measurement of a Cedar( Cedrus deodara) community based on Unmanned Aerial Vehicles(UAV) 3D photogrammetry technology
[J]. Acta Ecologica Sinica ,2018 ,38 (10 ):3524 -3533 .
[本文引用: 1]
王彬 , 孙虎 , 徐倩 , 等 基于无人3D摄影技术的雪松(Cedrus deodara)群落高度测定
[J].生态学报 ,2018 ,38 (10 ):3524 -3533 .
[本文引用: 1]
[23]
ZHAO Wenjun DING Zhiqi WANG Hongsen A new real estate measurement method based on fusion of obliquephotogrammetric real scene model data and LiDAR point cloud data
[J]. Bulletin of Surveying and Mapping ,2021 (2 ):87 -92 .
[本文引用: 1]
赵文军 , 丁智奇 , 王泓森 倾斜实景模型和LiDAR点云数据相融合的不动产测量新方法
[J].测绘通报 ,2021 (2 ):87 -92 .
[本文引用: 1]
[24]
DING Shaopeng LIU Rufei CAI Yongning et al A point cloud adaptive slope filtering method considering terrain
[J]. Remote Sensing Information ,2019 ,34 (4 ):108 -113 .
[本文引用: 1]
丁少鹏 , 刘如飞 , 蔡永宁 , 等 一种顾及地形的点云自适应坡度滤波方法
[J].遥感信息 ,2019 ,34 (4 ):108 -113 .
[本文引用: 1]
[25]
ZHANG Gang LIU Wenbin ZHANG Nan Progressive morphological filtering method of dense matching point cloud based on region feature segmentation
[J]. Journal of Geo-Information Science ,2019 ,21 (4 ):615 -622 .
[本文引用: 1]
张刚 , 刘文彬 , 张男 基于区域特征分割的密集匹配点云渐进形态学滤波
[J].地球信息科学学报 ,2019 ,21 (4 ):615 -622 .
[本文引用: 1]
[26]
ZHOU Liang WAN Yunxin SUN Chang An adaptive filtering algorithm of DSM based on smart terrain identification
[J]. Geomatics & Spatial Information Technology ,2016 ,39 (7 ):18 -20 .
[本文引用: 1]
周亮 , 万昀昕 , 孙畅 基于地形智能识别的自适应DSM滤波方法研究
[J].测绘与空间地理信息 ,2016 ,9 (7 ):18 -20 .
[本文引用: 1]
[27]
ZHANG W QI J WAN P et al An easy-to-use airborne LiDAR data filtering method based on cloth simulation
[J]. Remote Sensing . 2016 , 8 (6 ):501 . DOI:10.3390/rs8060501
[本文引用: 1]
[28]
WANG Kai Research on point cloud filtering algorithm and feature extraction of airborne lidar
[D]. Nanchang : East China University of Technology ,2021 .
[本文引用: 1]
王凯 机载激光雷达点云滤波算法及地面特征提取研究
[D].南昌 :东华理工大学 ,2021 .
[本文引用: 1]
[29]
WANG Xiaoqin WANG Miaomiao WANG Shaoqiang et al Extraction of vegetation information from visible unmanned aerial vehicle images
[J]. Transactions of the Chinese Society of Agricultural Engineering ,2015 ,31 (5 ):152 -159 .
[本文引用: 1]
汪小钦 , 王苗苗 , 王绍强 , 等 基于可见光波段无人机遥感的植被信息提取
[J].农业工程学报 ,2015 ,31 (5 ):152 -159 .
[本文引用: 1]
[30]
DRALLE K RUDEMO M Automatic estimation of individual tree positions from aerial photos
[J]. Canadian Journal of Forest Research ,2008 , 27 (11 ):1728 -1736 . DOI:10.1139/cjfr-27-11-1728
[本文引用: 1]
[31]
POULIOT D A KING D J BELL F W et al Automated tree crown detection and delineation in high-resolution digital camera imagery of coniferous forest regeneration
[J]. Remote Sensing of Environment , 2002 , 82 (2-3 ):322 -334 . DOI:10.1016/S0034-4257(02)00050-0
[本文引用: 1]
[32]
WULDER M NIEMANN K O GOODENOUGH D G Local maximum filtering for the extraction of tree locations and basal area from high spatial resolution imagery
[J]. Remote Sensing of Environment , 2000 , 73 (1 ):103 -114 . DOI:10.1016/S0034-4257(00)00101-2
[本文引用: 1]
[33]
CULVENOR D S TIDA: an algorithm for the delineation of tree crowns in high spatial resolution remotely sensed imagery
[J]. Computers & Geosciences , 2002 , 28 (1 ):33 -44 . DOI:10.1016/S0098-3004(00)00110-2
[本文引用: 1]
[34]
LI Xiang ZHEN Zhen ZHAO Yinhui Suitable model of detecting the position of individual treetop based on local maximum method
[J]. Journal of Beijing Forestry University ,2015 ,37 (3 ):27 -33 .
[本文引用: 1]
李响 , 甄贞 , 赵颖慧 基于局域最大值法单木位置探测的适宜模型研究
[J].北京林业大学学报 ,2015 ,37 (3 ):27 -33 .
[本文引用: 1]
[35]
LIU Qingwang LI Zengyuan CHEN Erxue et al Extracting height and crown of individual tree using airborne LiDAR data
[J].Journal of Beijing Forestry University ,2008 ,30 (6 ):83 -89 .
[本文引用: 1]
刘清旺 , 李增元 , 陈尔学 , 等 利用机载激光雷达数据提取单株木树高和树冠
[J].北京林业大学学报 ,2008 ,30 (6 ):83 -89 .
[本文引用: 1]
[36]
YANG Qiuli WEI Jianxin ZHENG Jianghua et al Comparison of interpolation methods of digital elevation model using discrete point cloud data
[J]. Science of Surveying and Mapping ,2019 ,44 (7 ):16 -23 .
[本文引用: 1]
杨秋丽 , 魏建新 , 郑江华 , 等 离散点云构建数字高程模型的插值方法研究
[J].测绘科学 ,2019 ,44 (7 ):16 -23 .
[本文引用: 1]
[37]
CHEN Zhoujuan CHENG Guang BU Yuankun et al Single tree parameters extraction of broad-leaved forest based on UAV tilting photography
[J]. Forest Resource Mangement ,2022 (1 ):132 -141 .
[本文引用: 1]
陈周娟 , 程光 , 卜元坤 , 等 基于无人机倾斜影像的阔叶林单木参数提取
[J].林业资源管理 ,2022 (1 ):132 -141 .
[本文引用: 1]
[38]
DU Yihong YIN Tian ZHOU Xuemei et al Extraction of individual tree parameters of chinese pine by oblique photogrammetry
[J]. Journal of Beijing Forestry University ,2021 ,43 (4 ):77 -86 .
[本文引用: 1]
杜意鸿 ,尹田 ,周雪梅 ,等 倾斜摄影测量技术提取油松单木信息
[J].北京林业大学学报 ,2021 ,43 (4 ):77 -86 .
[本文引用: 1]
[39]
GAO Fei SHI Haijing SHUI Junfeng et al Structural parameter extraction of artificial forest in northern Shaanxi based on UAV high-resolution image
[J]. Science of Soil and Water Conservation ,2021 ,19 (4 ):1 -12 .
[本文引用: 1]
高飞 , 史海静 , 税军峰 , 等 基于UAV高分影像的陕北人工林结构参数提取
[J].中国水土保持科学 ,2021 ,19 (4 ):1 -12 .
[本文引用: 1]
[40]
LIU Haoran FAN Weiwei XU Yongsheng et al Single tree biomass estimation based on UAV LiDAR point cloud
[J]. Journal of Central South University of Forestry & Technology ,2021 ,41 (8 ):92 -99 .
[本文引用: 1]
刘浩然 , 范伟伟 , 徐永胜 , 等 基于无人机激光雷达点云的单木生物量估测
[J].中南林业科技大学学报 ,2021 ,41 (8 ):92 -99 .
[本文引用: 1]
[41]
ZHAO Chenyang XING Yanqiu HUO Da et al Key technologies of three-dimensional geometric reconstruction of larch crown shape based on LiDAR data
[J]. Journal of Northwest Forestry University ,2015 ,30 (2 ):186 -190 .
[本文引用: 1]
赵晨阳 ,邢艳秋 , 霍达 ,等 基于机载LiDAR落叶松树冠几何形状三维重建关键技术研究
[J].西北林学院学报 ,2015 ,30 (2 ):186 -190 .
[本文引用: 1]
基于无人机遥感的森林参数信息提取研究进展
1
2020
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
基于无人机遥感的森林参数信息提取研究进展
1
2020
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
目测法估测树高的误差分析
1
2012
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
目测法估测树高的误差分析
1
2012
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
三角高程法树高测量与精度分析
1
2007
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
三角高程法树高测量与精度分析
1
2007
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
基于地面激光雷达点云数据的森林树高、胸径自动提取与三维重建
1
2019
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
基于地面激光雷达点云数据的森林树高、胸径自动提取与三维重建
1
2019
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
一种基于车载激光扫描点云数据的单株行道树信息提取方法
1
2013
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
一种基于车载激光扫描点云数据的单株行道树信息提取方法
1
2013
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
基于无人机激光雷达的森林冠层高度分析——以祁连山东、中部青海云杉为例
1
2021
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
基于无人机激光雷达的森林冠层高度分析——以祁连山东、中部青海云杉为例
1
2021
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
基于WorldView-3遥感影像与机载LiDAR的单木树高提取
1
2022
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
基于WorldView-3遥感影像与机载LiDAR的单木树高提取
1
2022
... 树高作为森林资源调查的一项重要指标,能够反映森林树木的生长情况,对于估测森林绿量、蓄积量、碳储量等具有重要意义[1 ] .目前,单木树高测量主要有传统地面测量调查和遥感估测两类.传统地面树高测量有人工目测[2 ] 、测高仪、全站仪[3 ] 等,不仅耗时耗力、工作效率低,而且容易受到人为因素、仪器质量等影响,导致树高测量精度存在一定误差.目前,随着激光雷达技术的发展,根据遥感平台的不同,地面激光雷达技术[4 ] 、车载激光雷达技术[5 ] 、机载激光雷达技术[6 -7 ] 已经被广泛应用于森林参数结构的获取,但由于其设备昂贵、数据处理复杂、技术难度高等缺点,限制了在林业领域的发展.近年来无人机遥感技术凭借其低成本、高分辨率、采集周期短等特点,在地形测绘、森林遥感估测等领域已有广泛应用. ...
多平台点云数据的单木参数提取精度分析
1
2022
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
多平台点云数据的单木参数提取精度分析
1
2022
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机三维信息的杉木新造林林分参数遥感估测研究
1
2023
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机三维信息的杉木新造林林分参数遥感估测研究
1
2023
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机遥感技术的森林参数获取研究进展
1
2021
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机遥感技术的森林参数获取研究进展
1
2021
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
利用无人机高分辨率影像进行树木高度提取
1
2017
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
利用无人机高分辨率影像进行树木高度提取
1
2017
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机影像的天山云杉林树高提取及蓄积量的反演
1
2021
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机影像的天山云杉林树高提取及蓄积量的反演
1
2021
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
一般消费级无人机的树障监测精度验证
1
2021
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
一般消费级无人机的树障监测精度验证
1
2021
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
杉木人工林冠层高度无人机遥感估测
1
2019
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
杉木人工林冠层高度无人机遥感估测
1
2019
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
结合DSM的机载LiDAR单木树高提取研究
1
2021
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
结合DSM的机载LiDAR单木树高提取研究
1
2021
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
无人机遥感估算绿化园林三维绿量——以福州大学旗山校区为例
0
2020
无人机遥感估算绿化园林三维绿量——以福州大学旗山校区为例
0
2020
基于无人机影像的山核桃单木检测及冠幅与树高的提取
0
2023
基于无人机影像的山核桃单木检测及冠幅与树高的提取
0
2023
基于无人机激光雷达和多光谱数据的森林树高提取方法研究
1
2023
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机激光雷达和多光谱数据的森林树高提取方法研究
1
2023
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机影像的树顶点和树高提取及其影响因素分析
1
2019
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机影像的树顶点和树高提取及其影响因素分析
1
2019
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机可见光遥感的单木树高提取方法研究
1
2021
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机可见光遥感的单木树高提取方法研究
1
2021
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机数据的人工林森林参数估测
1
2019
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人机数据的人工林森林参数估测
1
2019
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人3D摄影技术的雪松(Cedrus deodara)群落高度测定
1
2018
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
基于无人3D摄影技术的雪松(Cedrus deodara)群落高度测定
1
2018
... 目前利用无人机技术提取树高主要是基于冠层高度模型(CHM)[8 -9 ] 和点云[10 -11 ] .基于CHM提取树高的关键是获取树顶点,通过对树顶点二维坐标赋值,其对应的栅格值即为树高.树顶点提取方法主要包括GIS邻域分析焦点统计[12 -13 ] 、块统计[14 ] 、局部最大值法[15 -18 ] .刘江俊等[19 ] 研究了不同分辨率的CHM和不同窗口大小对提取树高的影响,证明了基于无人机可见光遥感技术采用局部最大值法可以较好地提取密集针阔混交林树顶点和树高.白明雄等[20 ] 研究发现基于CHM提取天然云南松纯林树高与林分郁闭度有关,低郁闭度林分树高估测精度明显高于高郁闭度林分.汪霖等[21 ] 以校园东方杉人工实验林为样地,运用局部最大值以及种子点分割提取了样地株数、树高、冠幅等森林参数,结果表明该方法可以在很大程度上代替人工实测.王彬等[22 ] 选取校区内人工种植雪松为研究对象,研究表明基于无人机影像提取树高受外界影响因素小且成本低廉,可广泛运用于植物群落的调查研究中.综上所述,当前基于无人机倾斜测量技术提取树高主要面向的是针叶林,它们大多树冠形状呈中间高四周低的锥形,分布也较为规则,而阔叶林树冠更为复杂,单个树冠内存在多个局部峰值,且在较高郁闭度的阔叶林,无人机点云获取林下地面信息困难,因此有必要探究在不同林分郁闭度下基于无人机可见光遥感技术估算阔叶林树高的可行性. ...
倾斜实景模型和LiDAR点云数据相融合的不动产测量新方法
1
2021
... 实验采用Contenxt Capture Center软件处理影像数据,这款软件自动化程度高,具有较好的相机自检校功能,兼容多种数据源,支持输出多种数据格式.软件处理步骤主要包括:①数据预处理,对影像数据手工整理,删除曝光严重、色彩不均等有问题的照片.②空三处理,恢复相机姿态,通过影像特征匹配算法匹配同名点,导入控制点坐标并至少在两张以上的照片上刺点,然后进行光束法区域网平差.③重建产品,软件基于图形运算单元,采用多视角影像匹配技术[23 ]. 提取更多特征点.在这一步操作中,可以根据自己的要求输出不同类型和格式的数据. ...
倾斜实景模型和LiDAR点云数据相融合的不动产测量新方法
1
2021
... 实验采用Contenxt Capture Center软件处理影像数据,这款软件自动化程度高,具有较好的相机自检校功能,兼容多种数据源,支持输出多种数据格式.软件处理步骤主要包括:①数据预处理,对影像数据手工整理,删除曝光严重、色彩不均等有问题的照片.②空三处理,恢复相机姿态,通过影像特征匹配算法匹配同名点,导入控制点坐标并至少在两张以上的照片上刺点,然后进行光束法区域网平差.③重建产品,软件基于图形运算单元,采用多视角影像匹配技术[23 ]. 提取更多特征点.在这一步操作中,可以根据自己的要求输出不同类型和格式的数据. ...
一种顾及地形的点云自适应坡度滤波方法
1
2019
... 无人机影像经过空三测量和密集匹配后可以输出具有三维坐标、颜色信息的三维点云.不仅包括了地面点,还有测区建筑物、植被等非地面点.点云过滤是为了剔除非地面点,得到测区数字高程模型(DEM).当前主流的点云过滤算法主要包括坡度法[24 ] 、数学形态法[25 ] 、渐进加密三角网滤波算法[26 ] 等.这些算法参数设置较多,需要根据经验判断设置阈值,而且针对不同地形会有不同过滤效果.Zhang[27 ] 等提出的布料模拟过滤算法将点云翻转,定义一种布料覆盖其上,通过分析布料节点与点云的相互作用,使用高程阈值分离地面点和非地面点.该算法不需要过多的参数设置,而且针对小范围、地形较平坦的区域过滤效果较好[28 ] .因此本研究选择该算法用于无人机影像点云过滤,对滤波后的地面点采用自然邻域法插值生成DEM(分辨率为2.4 cm),如图5 所示. ...
一种顾及地形的点云自适应坡度滤波方法
1
2019
... 无人机影像经过空三测量和密集匹配后可以输出具有三维坐标、颜色信息的三维点云.不仅包括了地面点,还有测区建筑物、植被等非地面点.点云过滤是为了剔除非地面点,得到测区数字高程模型(DEM).当前主流的点云过滤算法主要包括坡度法[24 ] 、数学形态法[25 ] 、渐进加密三角网滤波算法[26 ] 等.这些算法参数设置较多,需要根据经验判断设置阈值,而且针对不同地形会有不同过滤效果.Zhang[27 ] 等提出的布料模拟过滤算法将点云翻转,定义一种布料覆盖其上,通过分析布料节点与点云的相互作用,使用高程阈值分离地面点和非地面点.该算法不需要过多的参数设置,而且针对小范围、地形较平坦的区域过滤效果较好[28 ] .因此本研究选择该算法用于无人机影像点云过滤,对滤波后的地面点采用自然邻域法插值生成DEM(分辨率为2.4 cm),如图5 所示. ...
基于区域特征分割的密集匹配点云渐进形态学滤波
1
2019
... 无人机影像经过空三测量和密集匹配后可以输出具有三维坐标、颜色信息的三维点云.不仅包括了地面点,还有测区建筑物、植被等非地面点.点云过滤是为了剔除非地面点,得到测区数字高程模型(DEM).当前主流的点云过滤算法主要包括坡度法[24 ] 、数学形态法[25 ] 、渐进加密三角网滤波算法[26 ] 等.这些算法参数设置较多,需要根据经验判断设置阈值,而且针对不同地形会有不同过滤效果.Zhang[27 ] 等提出的布料模拟过滤算法将点云翻转,定义一种布料覆盖其上,通过分析布料节点与点云的相互作用,使用高程阈值分离地面点和非地面点.该算法不需要过多的参数设置,而且针对小范围、地形较平坦的区域过滤效果较好[28 ] .因此本研究选择该算法用于无人机影像点云过滤,对滤波后的地面点采用自然邻域法插值生成DEM(分辨率为2.4 cm),如图5 所示. ...
基于区域特征分割的密集匹配点云渐进形态学滤波
1
2019
... 无人机影像经过空三测量和密集匹配后可以输出具有三维坐标、颜色信息的三维点云.不仅包括了地面点,还有测区建筑物、植被等非地面点.点云过滤是为了剔除非地面点,得到测区数字高程模型(DEM).当前主流的点云过滤算法主要包括坡度法[24 ] 、数学形态法[25 ] 、渐进加密三角网滤波算法[26 ] 等.这些算法参数设置较多,需要根据经验判断设置阈值,而且针对不同地形会有不同过滤效果.Zhang[27 ] 等提出的布料模拟过滤算法将点云翻转,定义一种布料覆盖其上,通过分析布料节点与点云的相互作用,使用高程阈值分离地面点和非地面点.该算法不需要过多的参数设置,而且针对小范围、地形较平坦的区域过滤效果较好[28 ] .因此本研究选择该算法用于无人机影像点云过滤,对滤波后的地面点采用自然邻域法插值生成DEM(分辨率为2.4 cm),如图5 所示. ...
基于地形智能识别的自适应DSM滤波方法研究
1
2016
... 无人机影像经过空三测量和密集匹配后可以输出具有三维坐标、颜色信息的三维点云.不仅包括了地面点,还有测区建筑物、植被等非地面点.点云过滤是为了剔除非地面点,得到测区数字高程模型(DEM).当前主流的点云过滤算法主要包括坡度法[24 ] 、数学形态法[25 ] 、渐进加密三角网滤波算法[26 ] 等.这些算法参数设置较多,需要根据经验判断设置阈值,而且针对不同地形会有不同过滤效果.Zhang[27 ] 等提出的布料模拟过滤算法将点云翻转,定义一种布料覆盖其上,通过分析布料节点与点云的相互作用,使用高程阈值分离地面点和非地面点.该算法不需要过多的参数设置,而且针对小范围、地形较平坦的区域过滤效果较好[28 ] .因此本研究选择该算法用于无人机影像点云过滤,对滤波后的地面点采用自然邻域法插值生成DEM(分辨率为2.4 cm),如图5 所示. ...
基于地形智能识别的自适应DSM滤波方法研究
1
2016
... 无人机影像经过空三测量和密集匹配后可以输出具有三维坐标、颜色信息的三维点云.不仅包括了地面点,还有测区建筑物、植被等非地面点.点云过滤是为了剔除非地面点,得到测区数字高程模型(DEM).当前主流的点云过滤算法主要包括坡度法[24 ] 、数学形态法[25 ] 、渐进加密三角网滤波算法[26 ] 等.这些算法参数设置较多,需要根据经验判断设置阈值,而且针对不同地形会有不同过滤效果.Zhang[27 ] 等提出的布料模拟过滤算法将点云翻转,定义一种布料覆盖其上,通过分析布料节点与点云的相互作用,使用高程阈值分离地面点和非地面点.该算法不需要过多的参数设置,而且针对小范围、地形较平坦的区域过滤效果较好[28 ] .因此本研究选择该算法用于无人机影像点云过滤,对滤波后的地面点采用自然邻域法插值生成DEM(分辨率为2.4 cm),如图5 所示. ...
An easy-to-use airborne LiDAR data filtering method based on cloth simulation
1
2016
... 无人机影像经过空三测量和密集匹配后可以输出具有三维坐标、颜色信息的三维点云.不仅包括了地面点,还有测区建筑物、植被等非地面点.点云过滤是为了剔除非地面点,得到测区数字高程模型(DEM).当前主流的点云过滤算法主要包括坡度法[24 ] 、数学形态法[25 ] 、渐进加密三角网滤波算法[26 ] 等.这些算法参数设置较多,需要根据经验判断设置阈值,而且针对不同地形会有不同过滤效果.Zhang[27 ] 等提出的布料模拟过滤算法将点云翻转,定义一种布料覆盖其上,通过分析布料节点与点云的相互作用,使用高程阈值分离地面点和非地面点.该算法不需要过多的参数设置,而且针对小范围、地形较平坦的区域过滤效果较好[28 ] .因此本研究选择该算法用于无人机影像点云过滤,对滤波后的地面点采用自然邻域法插值生成DEM(分辨率为2.4 cm),如图5 所示. ...
机载激光雷达点云滤波算法及地面特征提取研究
1
2021
... 无人机影像经过空三测量和密集匹配后可以输出具有三维坐标、颜色信息的三维点云.不仅包括了地面点,还有测区建筑物、植被等非地面点.点云过滤是为了剔除非地面点,得到测区数字高程模型(DEM).当前主流的点云过滤算法主要包括坡度法[24 ] 、数学形态法[25 ] 、渐进加密三角网滤波算法[26 ] 等.这些算法参数设置较多,需要根据经验判断设置阈值,而且针对不同地形会有不同过滤效果.Zhang[27 ] 等提出的布料模拟过滤算法将点云翻转,定义一种布料覆盖其上,通过分析布料节点与点云的相互作用,使用高程阈值分离地面点和非地面点.该算法不需要过多的参数设置,而且针对小范围、地形较平坦的区域过滤效果较好[28 ] .因此本研究选择该算法用于无人机影像点云过滤,对滤波后的地面点采用自然邻域法插值生成DEM(分辨率为2.4 cm),如图5 所示. ...
机载激光雷达点云滤波算法及地面特征提取研究
1
2021
... 无人机影像经过空三测量和密集匹配后可以输出具有三维坐标、颜色信息的三维点云.不仅包括了地面点,还有测区建筑物、植被等非地面点.点云过滤是为了剔除非地面点,得到测区数字高程模型(DEM).当前主流的点云过滤算法主要包括坡度法[24 ] 、数学形态法[25 ] 、渐进加密三角网滤波算法[26 ] 等.这些算法参数设置较多,需要根据经验判断设置阈值,而且针对不同地形会有不同过滤效果.Zhang[27 ] 等提出的布料模拟过滤算法将点云翻转,定义一种布料覆盖其上,通过分析布料节点与点云的相互作用,使用高程阈值分离地面点和非地面点.该算法不需要过多的参数设置,而且针对小范围、地形较平坦的区域过滤效果较好[28 ] .因此本研究选择该算法用于无人机影像点云过滤,对滤波后的地面点采用自然邻域法插值生成DEM(分辨率为2.4 cm),如图5 所示. ...
基于可见光波段无人机遥感的植被信息提取
1
2015
... 考虑测区建筑物较多,需要消除建筑物干扰,本文利用汪小钦等[29 ] 提出的基于可见光波段差异植被指数(VDVI)区分植被和非植被.公式如下: ...
基于可见光波段无人机遥感的植被信息提取
1
2015
... 考虑测区建筑物较多,需要消除建筑物干扰,本文利用汪小钦等[29 ] 提出的基于可见光波段差异植被指数(VDVI)区分植被和非植被.公式如下: ...
Automatic estimation of individual tree positions from aerial photos
1
2008
... 局部最大值算法主要有两种,固定窗口的局部最大值[30 -31 ] 、动态窗口的局部最大值[32 -33 ] .动态窗口的局部最大值需要分析树高和冠幅的关系,适合树高和冠幅相关系较好的林木,且需要的样本数量多,不同树种需构建不同的方程,目前主要应用在针叶林单木参数提取研究中[34 -35 ] .所以实验采用固定窗口局部最大值法,该算法为:①利用Geotiffread函数读取冠层高度模型栅格影像信息;②使用Circshift函数进行循环移位,调节影像灰度值附近指定窗口大小;③比较固定窗口大小内的所有值,记录局部最大值,输出为1;④利用find函数记录值为1的行列号,并转变成地理坐标,则为提取的树顶点坐标. ...
Automated tree crown detection and delineation in high-resolution digital camera imagery of coniferous forest regeneration
1
2002
... 局部最大值算法主要有两种,固定窗口的局部最大值[30 -31 ] 、动态窗口的局部最大值[32 -33 ] .动态窗口的局部最大值需要分析树高和冠幅的关系,适合树高和冠幅相关系较好的林木,且需要的样本数量多,不同树种需构建不同的方程,目前主要应用在针叶林单木参数提取研究中[34 -35 ] .所以实验采用固定窗口局部最大值法,该算法为:①利用Geotiffread函数读取冠层高度模型栅格影像信息;②使用Circshift函数进行循环移位,调节影像灰度值附近指定窗口大小;③比较固定窗口大小内的所有值,记录局部最大值,输出为1;④利用find函数记录值为1的行列号,并转变成地理坐标,则为提取的树顶点坐标. ...
Local maximum filtering for the extraction of tree locations and basal area from high spatial resolution imagery
1
2000
... 局部最大值算法主要有两种,固定窗口的局部最大值[30 -31 ] 、动态窗口的局部最大值[32 -33 ] .动态窗口的局部最大值需要分析树高和冠幅的关系,适合树高和冠幅相关系较好的林木,且需要的样本数量多,不同树种需构建不同的方程,目前主要应用在针叶林单木参数提取研究中[34 -35 ] .所以实验采用固定窗口局部最大值法,该算法为:①利用Geotiffread函数读取冠层高度模型栅格影像信息;②使用Circshift函数进行循环移位,调节影像灰度值附近指定窗口大小;③比较固定窗口大小内的所有值,记录局部最大值,输出为1;④利用find函数记录值为1的行列号,并转变成地理坐标,则为提取的树顶点坐标. ...
TIDA: an algorithm for the delineation of tree crowns in high spatial resolution remotely sensed imagery
1
2002
... 局部最大值算法主要有两种,固定窗口的局部最大值[30 -31 ] 、动态窗口的局部最大值[32 -33 ] .动态窗口的局部最大值需要分析树高和冠幅的关系,适合树高和冠幅相关系较好的林木,且需要的样本数量多,不同树种需构建不同的方程,目前主要应用在针叶林单木参数提取研究中[34 -35 ] .所以实验采用固定窗口局部最大值法,该算法为:①利用Geotiffread函数读取冠层高度模型栅格影像信息;②使用Circshift函数进行循环移位,调节影像灰度值附近指定窗口大小;③比较固定窗口大小内的所有值,记录局部最大值,输出为1;④利用find函数记录值为1的行列号,并转变成地理坐标,则为提取的树顶点坐标. ...
基于局域最大值法单木位置探测的适宜模型研究
1
2015
... 局部最大值算法主要有两种,固定窗口的局部最大值[30 -31 ] 、动态窗口的局部最大值[32 -33 ] .动态窗口的局部最大值需要分析树高和冠幅的关系,适合树高和冠幅相关系较好的林木,且需要的样本数量多,不同树种需构建不同的方程,目前主要应用在针叶林单木参数提取研究中[34 -35 ] .所以实验采用固定窗口局部最大值法,该算法为:①利用Geotiffread函数读取冠层高度模型栅格影像信息;②使用Circshift函数进行循环移位,调节影像灰度值附近指定窗口大小;③比较固定窗口大小内的所有值,记录局部最大值,输出为1;④利用find函数记录值为1的行列号,并转变成地理坐标,则为提取的树顶点坐标. ...
基于局域最大值法单木位置探测的适宜模型研究
1
2015
... 局部最大值算法主要有两种,固定窗口的局部最大值[30 -31 ] 、动态窗口的局部最大值[32 -33 ] .动态窗口的局部最大值需要分析树高和冠幅的关系,适合树高和冠幅相关系较好的林木,且需要的样本数量多,不同树种需构建不同的方程,目前主要应用在针叶林单木参数提取研究中[34 -35 ] .所以实验采用固定窗口局部最大值法,该算法为:①利用Geotiffread函数读取冠层高度模型栅格影像信息;②使用Circshift函数进行循环移位,调节影像灰度值附近指定窗口大小;③比较固定窗口大小内的所有值,记录局部最大值,输出为1;④利用find函数记录值为1的行列号,并转变成地理坐标,则为提取的树顶点坐标. ...
利用机载激光雷达数据提取单株木树高和树冠
1
2008
... 局部最大值算法主要有两种,固定窗口的局部最大值[30 -31 ] 、动态窗口的局部最大值[32 -33 ] .动态窗口的局部最大值需要分析树高和冠幅的关系,适合树高和冠幅相关系较好的林木,且需要的样本数量多,不同树种需构建不同的方程,目前主要应用在针叶林单木参数提取研究中[34 -35 ] .所以实验采用固定窗口局部最大值法,该算法为:①利用Geotiffread函数读取冠层高度模型栅格影像信息;②使用Circshift函数进行循环移位,调节影像灰度值附近指定窗口大小;③比较固定窗口大小内的所有值,记录局部最大值,输出为1;④利用find函数记录值为1的行列号,并转变成地理坐标,则为提取的树顶点坐标. ...
利用机载激光雷达数据提取单株木树高和树冠
1
2008
... 局部最大值算法主要有两种,固定窗口的局部最大值[30 -31 ] 、动态窗口的局部最大值[32 -33 ] .动态窗口的局部最大值需要分析树高和冠幅的关系,适合树高和冠幅相关系较好的林木,且需要的样本数量多,不同树种需构建不同的方程,目前主要应用在针叶林单木参数提取研究中[34 -35 ] .所以实验采用固定窗口局部最大值法,该算法为:①利用Geotiffread函数读取冠层高度模型栅格影像信息;②使用Circshift函数进行循环移位,调节影像灰度值附近指定窗口大小;③比较固定窗口大小内的所有值,记录局部最大值,输出为1;④利用find函数记录值为1的行列号,并转变成地理坐标,则为提取的树顶点坐标. ...
离散点云构建数字高程模型的插值方法研究
1
2019
... 数字高程模型是影响树高提取精度的要素之一,因此有必要分析布料模拟过滤算法结合自然邻域法插值生成数字高程模型的精度.实验利用实测地面点高程,采用平均误差(ME)、均方根误差(RMSE)、预测吻合度(R 2 )来评价DEM精度[36 ]. 公式如(4)所示,绝对误差点位分布如8(a),绝对误差区间分布如图8 (b)所示. ...
离散点云构建数字高程模型的插值方法研究
1
2019
... 数字高程模型是影响树高提取精度的要素之一,因此有必要分析布料模拟过滤算法结合自然邻域法插值生成数字高程模型的精度.实验利用实测地面点高程,采用平均误差(ME)、均方根误差(RMSE)、预测吻合度(R 2 )来评价DEM精度[36 ]. 公式如(4)所示,绝对误差点位分布如8(a),绝对误差区间分布如图8 (b)所示. ...
基于无人机倾斜影像的阔叶林单木参数提取
1
2022
... 目前基于无人机遥感技术估测树高也有学者做了相关研究,陈周娟等[37 ] 采用无人机倾斜测量技术提取阔叶林树高RMSE为1.91 m,R 2 达到了0.99.杜意鸿等[38 ] 利用倾斜测量技术提取油松树高,研究表明局部最大值算法结合分水岭算法、均值漂移算法基于0.5 m相片分辨率得到的单木树高平均误差最小,分别为42 cm和66 cm.高飞等[39 ] 采用无人机高分影像提取的陕北人工林树高与实测值之间有明显的线性关系,R 2 为0.80.刘浩然等[40 ] 基于无人机激光雷达技术对哈尔滨城市林业示范基地提取水曲柳树高的R 2 为0.86,RMSE为49 cm;樟子松树高的R 2 为0.84,RMSE为40 cm.赵晨阳等[41 ] 以长春净月谭为实验区,采用机载LiDAR数据估测落叶松树高,其相关系数R 2 为0.892 4,平均相对误差为-2.54%.实验采用了两块阔叶林样地,且研究区存在部分空地,提供了一定的地面条件,生成的DEM精度较高,有利于提高树高估测精度,将本文树高提取结果与上述研究结果进行比较,证明了基于小型无人机可见光遥感提取不同郁闭度阔叶林树高是可行的. ...
基于无人机倾斜影像的阔叶林单木参数提取
1
2022
... 目前基于无人机遥感技术估测树高也有学者做了相关研究,陈周娟等[37 ] 采用无人机倾斜测量技术提取阔叶林树高RMSE为1.91 m,R 2 达到了0.99.杜意鸿等[38 ] 利用倾斜测量技术提取油松树高,研究表明局部最大值算法结合分水岭算法、均值漂移算法基于0.5 m相片分辨率得到的单木树高平均误差最小,分别为42 cm和66 cm.高飞等[39 ] 采用无人机高分影像提取的陕北人工林树高与实测值之间有明显的线性关系,R 2 为0.80.刘浩然等[40 ] 基于无人机激光雷达技术对哈尔滨城市林业示范基地提取水曲柳树高的R 2 为0.86,RMSE为49 cm;樟子松树高的R 2 为0.84,RMSE为40 cm.赵晨阳等[41 ] 以长春净月谭为实验区,采用机载LiDAR数据估测落叶松树高,其相关系数R 2 为0.892 4,平均相对误差为-2.54%.实验采用了两块阔叶林样地,且研究区存在部分空地,提供了一定的地面条件,生成的DEM精度较高,有利于提高树高估测精度,将本文树高提取结果与上述研究结果进行比较,证明了基于小型无人机可见光遥感提取不同郁闭度阔叶林树高是可行的. ...
倾斜摄影测量技术提取油松单木信息
1
2021
... 目前基于无人机遥感技术估测树高也有学者做了相关研究,陈周娟等[37 ] 采用无人机倾斜测量技术提取阔叶林树高RMSE为1.91 m,R 2 达到了0.99.杜意鸿等[38 ] 利用倾斜测量技术提取油松树高,研究表明局部最大值算法结合分水岭算法、均值漂移算法基于0.5 m相片分辨率得到的单木树高平均误差最小,分别为42 cm和66 cm.高飞等[39 ] 采用无人机高分影像提取的陕北人工林树高与实测值之间有明显的线性关系,R 2 为0.80.刘浩然等[40 ] 基于无人机激光雷达技术对哈尔滨城市林业示范基地提取水曲柳树高的R 2 为0.86,RMSE为49 cm;樟子松树高的R 2 为0.84,RMSE为40 cm.赵晨阳等[41 ] 以长春净月谭为实验区,采用机载LiDAR数据估测落叶松树高,其相关系数R 2 为0.892 4,平均相对误差为-2.54%.实验采用了两块阔叶林样地,且研究区存在部分空地,提供了一定的地面条件,生成的DEM精度较高,有利于提高树高估测精度,将本文树高提取结果与上述研究结果进行比较,证明了基于小型无人机可见光遥感提取不同郁闭度阔叶林树高是可行的. ...
倾斜摄影测量技术提取油松单木信息
1
2021
... 目前基于无人机遥感技术估测树高也有学者做了相关研究,陈周娟等[37 ] 采用无人机倾斜测量技术提取阔叶林树高RMSE为1.91 m,R 2 达到了0.99.杜意鸿等[38 ] 利用倾斜测量技术提取油松树高,研究表明局部最大值算法结合分水岭算法、均值漂移算法基于0.5 m相片分辨率得到的单木树高平均误差最小,分别为42 cm和66 cm.高飞等[39 ] 采用无人机高分影像提取的陕北人工林树高与实测值之间有明显的线性关系,R 2 为0.80.刘浩然等[40 ] 基于无人机激光雷达技术对哈尔滨城市林业示范基地提取水曲柳树高的R 2 为0.86,RMSE为49 cm;樟子松树高的R 2 为0.84,RMSE为40 cm.赵晨阳等[41 ] 以长春净月谭为实验区,采用机载LiDAR数据估测落叶松树高,其相关系数R 2 为0.892 4,平均相对误差为-2.54%.实验采用了两块阔叶林样地,且研究区存在部分空地,提供了一定的地面条件,生成的DEM精度较高,有利于提高树高估测精度,将本文树高提取结果与上述研究结果进行比较,证明了基于小型无人机可见光遥感提取不同郁闭度阔叶林树高是可行的. ...
基于UAV高分影像的陕北人工林结构参数提取
1
2021
... 目前基于无人机遥感技术估测树高也有学者做了相关研究,陈周娟等[37 ] 采用无人机倾斜测量技术提取阔叶林树高RMSE为1.91 m,R 2 达到了0.99.杜意鸿等[38 ] 利用倾斜测量技术提取油松树高,研究表明局部最大值算法结合分水岭算法、均值漂移算法基于0.5 m相片分辨率得到的单木树高平均误差最小,分别为42 cm和66 cm.高飞等[39 ] 采用无人机高分影像提取的陕北人工林树高与实测值之间有明显的线性关系,R 2 为0.80.刘浩然等[40 ] 基于无人机激光雷达技术对哈尔滨城市林业示范基地提取水曲柳树高的R 2 为0.86,RMSE为49 cm;樟子松树高的R 2 为0.84,RMSE为40 cm.赵晨阳等[41 ] 以长春净月谭为实验区,采用机载LiDAR数据估测落叶松树高,其相关系数R 2 为0.892 4,平均相对误差为-2.54%.实验采用了两块阔叶林样地,且研究区存在部分空地,提供了一定的地面条件,生成的DEM精度较高,有利于提高树高估测精度,将本文树高提取结果与上述研究结果进行比较,证明了基于小型无人机可见光遥感提取不同郁闭度阔叶林树高是可行的. ...
基于UAV高分影像的陕北人工林结构参数提取
1
2021
... 目前基于无人机遥感技术估测树高也有学者做了相关研究,陈周娟等[37 ] 采用无人机倾斜测量技术提取阔叶林树高RMSE为1.91 m,R 2 达到了0.99.杜意鸿等[38 ] 利用倾斜测量技术提取油松树高,研究表明局部最大值算法结合分水岭算法、均值漂移算法基于0.5 m相片分辨率得到的单木树高平均误差最小,分别为42 cm和66 cm.高飞等[39 ] 采用无人机高分影像提取的陕北人工林树高与实测值之间有明显的线性关系,R 2 为0.80.刘浩然等[40 ] 基于无人机激光雷达技术对哈尔滨城市林业示范基地提取水曲柳树高的R 2 为0.86,RMSE为49 cm;樟子松树高的R 2 为0.84,RMSE为40 cm.赵晨阳等[41 ] 以长春净月谭为实验区,采用机载LiDAR数据估测落叶松树高,其相关系数R 2 为0.892 4,平均相对误差为-2.54%.实验采用了两块阔叶林样地,且研究区存在部分空地,提供了一定的地面条件,生成的DEM精度较高,有利于提高树高估测精度,将本文树高提取结果与上述研究结果进行比较,证明了基于小型无人机可见光遥感提取不同郁闭度阔叶林树高是可行的. ...
基于无人机激光雷达点云的单木生物量估测
1
2021
... 目前基于无人机遥感技术估测树高也有学者做了相关研究,陈周娟等[37 ] 采用无人机倾斜测量技术提取阔叶林树高RMSE为1.91 m,R 2 达到了0.99.杜意鸿等[38 ] 利用倾斜测量技术提取油松树高,研究表明局部最大值算法结合分水岭算法、均值漂移算法基于0.5 m相片分辨率得到的单木树高平均误差最小,分别为42 cm和66 cm.高飞等[39 ] 采用无人机高分影像提取的陕北人工林树高与实测值之间有明显的线性关系,R 2 为0.80.刘浩然等[40 ] 基于无人机激光雷达技术对哈尔滨城市林业示范基地提取水曲柳树高的R 2 为0.86,RMSE为49 cm;樟子松树高的R 2 为0.84,RMSE为40 cm.赵晨阳等[41 ] 以长春净月谭为实验区,采用机载LiDAR数据估测落叶松树高,其相关系数R 2 为0.892 4,平均相对误差为-2.54%.实验采用了两块阔叶林样地,且研究区存在部分空地,提供了一定的地面条件,生成的DEM精度较高,有利于提高树高估测精度,将本文树高提取结果与上述研究结果进行比较,证明了基于小型无人机可见光遥感提取不同郁闭度阔叶林树高是可行的. ...
基于无人机激光雷达点云的单木生物量估测
1
2021
... 目前基于无人机遥感技术估测树高也有学者做了相关研究,陈周娟等[37 ] 采用无人机倾斜测量技术提取阔叶林树高RMSE为1.91 m,R 2 达到了0.99.杜意鸿等[38 ] 利用倾斜测量技术提取油松树高,研究表明局部最大值算法结合分水岭算法、均值漂移算法基于0.5 m相片分辨率得到的单木树高平均误差最小,分别为42 cm和66 cm.高飞等[39 ] 采用无人机高分影像提取的陕北人工林树高与实测值之间有明显的线性关系,R 2 为0.80.刘浩然等[40 ] 基于无人机激光雷达技术对哈尔滨城市林业示范基地提取水曲柳树高的R 2 为0.86,RMSE为49 cm;樟子松树高的R 2 为0.84,RMSE为40 cm.赵晨阳等[41 ] 以长春净月谭为实验区,采用机载LiDAR数据估测落叶松树高,其相关系数R 2 为0.892 4,平均相对误差为-2.54%.实验采用了两块阔叶林样地,且研究区存在部分空地,提供了一定的地面条件,生成的DEM精度较高,有利于提高树高估测精度,将本文树高提取结果与上述研究结果进行比较,证明了基于小型无人机可见光遥感提取不同郁闭度阔叶林树高是可行的. ...
基于机载LiDAR落叶松树冠几何形状三维重建关键技术研究
1
2015
... 目前基于无人机遥感技术估测树高也有学者做了相关研究,陈周娟等[37 ] 采用无人机倾斜测量技术提取阔叶林树高RMSE为1.91 m,R 2 达到了0.99.杜意鸿等[38 ] 利用倾斜测量技术提取油松树高,研究表明局部最大值算法结合分水岭算法、均值漂移算法基于0.5 m相片分辨率得到的单木树高平均误差最小,分别为42 cm和66 cm.高飞等[39 ] 采用无人机高分影像提取的陕北人工林树高与实测值之间有明显的线性关系,R 2 为0.80.刘浩然等[40 ] 基于无人机激光雷达技术对哈尔滨城市林业示范基地提取水曲柳树高的R 2 为0.86,RMSE为49 cm;樟子松树高的R 2 为0.84,RMSE为40 cm.赵晨阳等[41 ] 以长春净月谭为实验区,采用机载LiDAR数据估测落叶松树高,其相关系数R 2 为0.892 4,平均相对误差为-2.54%.实验采用了两块阔叶林样地,且研究区存在部分空地,提供了一定的地面条件,生成的DEM精度较高,有利于提高树高估测精度,将本文树高提取结果与上述研究结果进行比较,证明了基于小型无人机可见光遥感提取不同郁闭度阔叶林树高是可行的. ...
基于机载LiDAR落叶松树冠几何形状三维重建关键技术研究
1
2015
... 目前基于无人机遥感技术估测树高也有学者做了相关研究,陈周娟等[37 ] 采用无人机倾斜测量技术提取阔叶林树高RMSE为1.91 m,R 2 达到了0.99.杜意鸿等[38 ] 利用倾斜测量技术提取油松树高,研究表明局部最大值算法结合分水岭算法、均值漂移算法基于0.5 m相片分辨率得到的单木树高平均误差最小,分别为42 cm和66 cm.高飞等[39 ] 采用无人机高分影像提取的陕北人工林树高与实测值之间有明显的线性关系,R 2 为0.80.刘浩然等[40 ] 基于无人机激光雷达技术对哈尔滨城市林业示范基地提取水曲柳树高的R 2 为0.86,RMSE为49 cm;樟子松树高的R 2 为0.84,RMSE为40 cm.赵晨阳等[41 ] 以长春净月谭为实验区,采用机载LiDAR数据估测落叶松树高,其相关系数R 2 为0.892 4,平均相对误差为-2.54%.实验采用了两块阔叶林样地,且研究区存在部分空地,提供了一定的地面条件,生成的DEM精度较高,有利于提高树高估测精度,将本文树高提取结果与上述研究结果进行比较,证明了基于小型无人机可见光遥感提取不同郁闭度阔叶林树高是可行的. ...









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}