




1 引 言
水污染对生态环境、可利用淡水资源和人类健康构成严重威胁。因此,定期对河流水质进行监测十分必要。传统的实地采样、实验室分析的监测方法人力和物力耗费巨大,而且效率十分低下。采用地面水质自动监测站的方式,因站点数量有限,且通常稀疏地分散在河流的不同区域,所以这些站点监测到的水质数据难以真实地反映出河流较大区域范围内的水质情况。与此相对,卫星遥感具有覆盖范围广、监测效率高等优点,随着利用遥感数据反演水质研究的进展,卫星遥感反演已广泛应用于水质监测领域。
水质参数根据其是否对某些特定光谱谱段具有明显的光学响应,分为光学活性参数和非光学活性参数两大类[1]。对于光学活性水质参数,可以根据其固有光学特性与水面反射率之间的关系建立遥感反演模型。目前对于光学活性参数的遥感反演,已有大量研究且取得较好的成果,如叶绿素[2-3]、总悬浮物[4-5]和有色溶解有机物[6]等。对于非光学活性水质参数,由于水体中多种水质成分和沉积物存在的相互影响,以及不同流域水体类型、水深以及周围环境的差异,导致非光学活性参数对水面反射率的影响呈现出复杂多变的特点,这使得直接利用遥感获得的多光谱特征对其进行反演非常困难,而且传统的经验统计法、物理分析法和半经验法的泛化性较差,难以取得较好的反演结果[7]。相反通过数据驱动,能自动提取出数据之间复杂非线性关系的机器学习方法,非常适合用于提取非光学活性水质参数和多光谱遥感数据之间的相关性,并且能在一定程度上避免大气和其它环境因素带来的干扰,从而实现对这些水质参数的反演[7-8]。
Wang等[9]发现SPOT5卫星的红光、绿光和近红外谱段的观测值与非光学活性水质参数中的化学需氧量(Chemical Oxygen Demand,COD)和氨氮(Ammonia Nitrogen,NH3-N)数值之间具有较强的相关性。Kuan等[10]利用经过超分辨率算法处理后的哨兵2多光谱数据,实现了对内陆河流的NH3-N和COD等水质参数的反演。Guo等[11]用机器学习的方法,从多光谱遥感数据中反演出城市小型水体的溶解氧(Dissolved Oxygen,DO)和COD等水质参数。这些研究表明,DO、COD和NH3-N水质参数与多光谱遥感数据之间存在较强的相关性关系[12],揭示了利用数据驱动的机器学习方法,从多光谱遥感数据中反演出这些非光学活性参数的可能性。
实验以谷歌地球引擎(Google Earth Engine,GEE)云遥感处理平台[14]为分析处理平台,利用哨兵2卫星[15]多光谱地表反射率数据产品、中分辨率成像光谱仪(Moderate-resolution Imaging Spectroradiometer,MODIS)的地表温度、植被指数,和气溶胶光学厚度数据产品,以及ERA5气象数据,作为多源数据输入,以中国环境监测总站发布的全国主要流域地表水水质监测数据为目标,使用机器学习方法训练反演模型,实现对河流的DO、COD以及NH3-N水质参数的反演。实验结果表明,使用多源数据的DO,COD和NH3-N反演结果的确定系数(The Coefficient of Determination,R2)分别为0.896,0.781,0.529,均方根误差(Root Mean Square Error,RMSE)分别为0.263 mg/L,0.383 mg/L,0.061 mg/L,与只使用哨兵2多光谱遥感数据的反演结果相比,R2提高分别了7.04%,19.05%,18.34%,RMSE分别降低了34.58%,37.42%,14.08%。
2 数据获取与处理
2.1 地面水质监测数据
地面水质监测数据采用中国环境监测总站公开发布的全国主要流域144个地表水水质监测站点,2017年1月至2019年12月间的实时水质监测数据集[16]中,包含的DO、COD和NH3-N水质参数监测数据。数据集中的144个水质监测站点,从高纬度到低纬度,覆盖我国东部与南部地区的主要河流和湖泊,具有较广泛的空间代表性。
2.2 多源遥感数据与气象数据
2.2.1 哨兵2多光谱遥感数据
哨兵2[15]包括两颗相同的太阳同步轨道卫星,分别于2015年和2017年发射,每颗卫星上搭载一个具有13个光谱谱段的多光谱成像仪(Multispectral imager,MSI),成像的空间分辨率分别为10 m、20 m和60 m。
本研究使用经过辐射定标和大气校正的哨兵2 MSI L2A级数据产品[17],该数据产品代表哨兵2观测到的地表反射率。数据产品中的第10谱段数据,因其主要包含高空卷云的信息,所以被丢弃不用。另外,利用哨兵2提供的质量参数筛选出云量小于10%的数据,用于反演研究。
2.2.2 MODIS数据产品
(1)地表温度
在根据地面水质监测数据的坐标筛选地表温度数据时,由于云的遮挡,有些值可能是null,所以将Terra和Aqua两颗卫星的地表温度数据产品搭配使用,以减少数据的缺失。
(2)植被指数
(3)气溶胶光学厚度
气溶胶光学厚度(Aerosol Optical Depth,AOD)来自MODIS的MCD19A2[22]数据产品,时间分辨率为每天,空间分辨率为1 km。该产品提供波长分别为47 nm和55 nm的两种光学厚度数据。
2.2.3 ERA5气象数据
ERA5是欧洲中期天气预报中心(European Centre for Medium-Range Weather Forecasts,ECMWF)生产和发布的最新一代全球气象再分析资料,(
2.3 地面水质监测数据与多源数据的时空匹配
2.3.1 空间上的匹配
地面水质监测数据与多源遥感及气象数据在空间上的匹配,分为以下3个步骤:
步骤(1):在GEE平台[14]上,从哨兵2、MODIS和ERA5数据产品中,根据地面水质监测数据的坐标,筛选出2017年1月至2019年12月(水质监测数据集所覆盖的时间段)内的多源遥感及气象数据。
步骤(2):在GEE平台[14]上,将筛选出的MODIS和ERA5数据的投影方式,转换成哨兵2数据产品所使用的EPSG:32649投影方式。
步骤(3):以哨兵2的10 m分辨率的谱段2数据为基准,通过重采样和双三次插值方法[23],将哨兵2其它低空间分辨率的谱段数据,MODIS的地表温度、植被指数,和气溶胶光学厚度,以及ERA5的气象数据,插值到哨兵2谱段2数据的坐标处,最终完成多源遥感数据和气象数据在空间上的匹配。
2.3.2 时间上的匹配
经过空间匹配之后的多源遥感及气象数据需要进一步在时间上与地面水质监测数据进行匹配。因为每种数据产品的时间分辨率不同,且对时间变化的敏感程度不同,我们根据每种数据产品的特点,如表1所示,确定其在时间上与地面水质监测数据进行匹配的时间窗口大小。
表1 水质监测数据和多源遥感及气象数据匹配的时间窗口
Table 1
| 数据名称 | 哨兵2 | MODIS | ERA5 | ||
|---|---|---|---|---|---|
| 地表温度 | 植被指数 | 气溶胶 | |||
| 时间窗口 | 4 h | 同一天 | 同一天 | 同一天 | 1 h |
2.3.3 时空匹配后数据的异常值处理
对于经过与多源遥感及气象数据进行时空匹配后筛选出的地面水质监测数据,根据其数值分布的概率,进一步使用异常检测算法EllipticEnvelope[24]将过高或过低的异常水质监测值剔除,最后得到用于训练反演模型的地面水质监测数据样本集。
筛选出的地面水质监测数据集,异常值剔除前后的统计信息的差异如表2所示。
表2 与多源遥感和气象数据时空匹配后筛选出的地面水质监测数据样本集
Table 2
| 状态 | 水质参数 | 异常值处理比例 | 样本数 | 平均值/(mg | 标准偏差 | 最小值/(mg | 最大值/(mg |
|---|---|---|---|---|---|---|---|
| 异常值剔除前 | DO | - | 270 | 8.78 | 2.43 | 3.76 | 18.07 |
| COD | - | 270 | 2.29 | 2.34 | 0.10 | 15.60 | |
| NH3-N | - | 270 | 0.93 | 1.42 | 0.00 | 10.00 | |
| 异常值剔除后 | DO | 0.08 | 249 | 8.29 | 1.54 | 4.70 | 12.10 |
| COD | 0.10 | 243 | 1.68 | 1.33 | 0.10 | 5.25 | |
| NH3-N | 0.20 | 216 | 0.55 | 0.65 | 0.00 | 2.80 |
3 水质参数反演模型
3.1 支持向量回归
图1
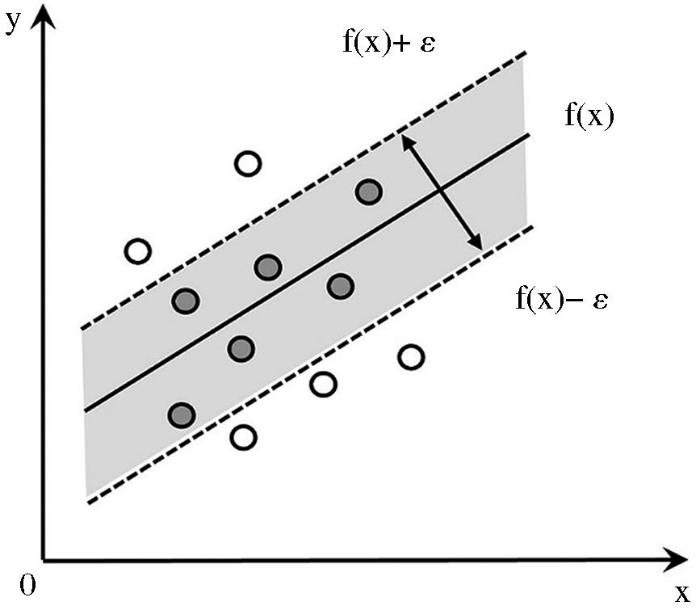
因为仅有作为支持向量的关键训练样本用于决定回归超平面的位置,所以SVR的性能不会过度依赖训练数据量的多少[30],因此在可获得样本数量有限的遥感任务中SVR具有一定优势。
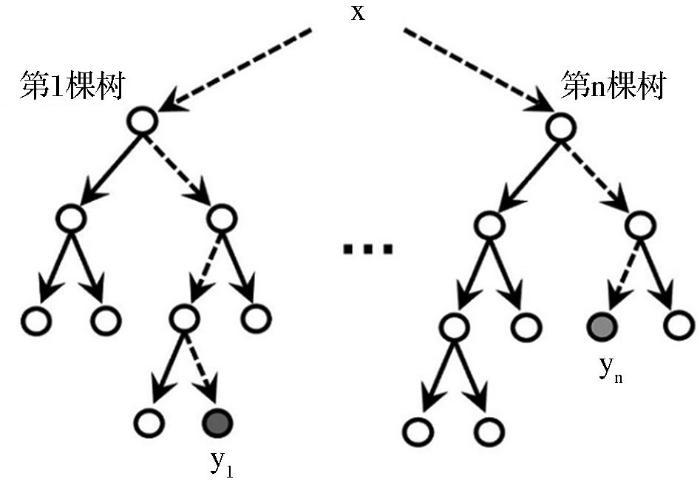
3.2 随机森林
图2
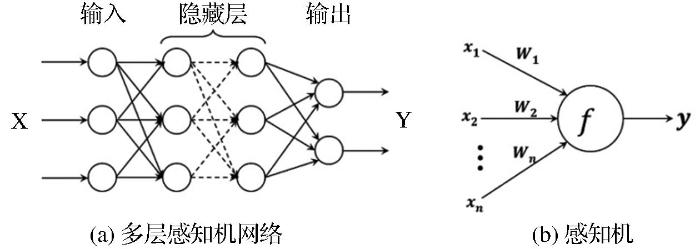
3.3 多层感知机
图3
4 实验设计与数据准备
4.1 实验数据准备
4.1.1 模型训练及测试数据集
先将地面水质监测数据与多源遥感及气象数据进行时空匹配,筛选出时空一致的数据,再根据地面水质监测值的概率分布信息剔除掉其中的异常值,最终形成用以反演模型训练和测试的样本数据集。
从样本数据集中随机抽取80%作为模型的训练集,剩余的20%作为测试集,用以模型的训练和测试。为了防止训练过程中模型过拟合,并评估模型的泛化性能,总共生成10组训练和测试集,将模型在10组测试集上性能指标的平均值作为模型最终的性能指标。
4.1.2 模型鲁棒性评估数据集
地面水质监测数据、多源遥感和气象数据中,除去作为模型训练和测试用的样本数据集之外,剩余的数据,根据地面水质监测数据与多源遥感和气象数据时空匹配的情况,可以分为以下4类,分别为:
(1)对某个地面监测站,虽然有空间上能与之匹配的多源遥感及气象数据,但如果它的某一特定时刻的水质监测数据,没有时间上能匹配的多源遥感数据,那么它在这个时刻的监测数据,称为时间未匹配的水质监测数据。
(2)对某个地面监测站,能与其空间匹配的所有多源遥感及气象数据,可以构成一个集合。如果集合不为空,并且至少有一组多源遥感及气象数据,与这个监测站的水质监测数据在时间上也能匹配,那么对于集合中剩余的,所有与这个监测站数据,在时间上不能匹配的多源遥感及气象数据,被称为时间未匹配的多源遥感及气象数据。
(3)对某个地面监测站,如果没有任何多源遥感及气象数据,能与其在空间上匹配,这个监测站的所有水质监测数据,称为空间未匹配的水质监测数据。
(4)对某个地面监测站,能与其空间匹配的所有多源遥感及气象数据,可以构成一个集合。如果集合不为空,并且没有任何一组多源遥感及气象数据,能与这个监测站的水质监测数据,在时间上匹配上,那么这个集合中的所有多源遥感及气象数据,称为空间未匹配的遥感数据。
用上述4种时空不匹配的数据集,对反演模型的鲁棒性进行评估。
模型训练和测试数据集、模型鲁棒性评估数据集所包含的地面水质监测数据、多源遥感及气象数据的情况,如表3所示。
表3 模型鲁棒性评估实验所用的数据集
Table 3
| 实验名称 | 数据集 | 水质参数/(个/组) | ||
|---|---|---|---|---|
| DO | COD | NH3-N | ||
| 所有地面水质监测数据 | 812 441 | 811 147 | 804 843 | |
| 时空匹配实验 | 训练数据 | 249 | 243 | 216 |
| 测试数据 | 75 | 73 | 65 | |
| 时间未匹配实验 | 水质监测数据 | 234 470 | 235 918 | 235 598 |
| 多源遥感及气象数据 | 142 | 142 | 142 | |
| 空间未匹配实验 | 水质监测数据 | 575 436 | 580 629 | 574 486 |
| 多源遥感及气象数据 | 219 | 219 | 219 | |
4.2 实验设计
4.2.1 建模参数选取
本研究在建立水质反演模型时,选择哨兵2的多光谱数据(MSI),MODIS的地表温度(LST)、植被指数(VI)、气溶胶光学厚度(AOD),以及ERA5的10 m风速(WS)作为候选的建模参数。其中,哨兵2的多个谱段的反射率可以体现水体中不同成分对光的吸收和反射情况,解析其与DO、COD和NH3-N参数值之间的关系,可以建立反演模型。
除了多光谱反射率之外,反映河流及周围环境因素的LST、VI、AOD和WS也被考虑进去。首先,大气状态和水面平整度与卫星观测到的反射率有关,卫星观测到的水表反射的太阳辐射需要在大气、水面和水体之间传输,在这个过程中,水面的起伏波动,以及大气中的气溶胶都会改变其原本的传输路径,导致观测到的反射率与实际的水表反射率之间产生偏差。另外,水体的富营养化程度和DO、COD和NH3-N之间也存在着密切的关联,河流的富营养化会导致水中藻类大量繁殖,影响水体的光学特性、氧气含量和各种生物过程,进而影响DO、COD和NH3-N参数值。综上,挑选能够影响水面平整度的风速、反映大气状态的气溶胶光学厚度,以及影响和反映水体中营养状态的地表温度和植被指数作为反演模型的辅助参数,以提供更加全面、准确的水质反演结果。
4.2.2 模型训练及性能评估实验
为了从哨兵2的MSI,MODIS的LST、VI、AOD,以及ERA5的WS等多源数据中,选择出每种水质参数反演模型最合适的输入特征组合,以哨兵2的多光谱数据为基础的输入特征,评估增加考虑环境因素和大气因素对反演模型性能的影响,总共可形成四大类共14种输入特征的组合,分别为:
(1)仅以哨兵2的多光谱为模型输入,即为MSI。
(2)增加河流周边地表温度和植被指数环境因素的影响,即可形成MSI+LST、MSI+VI、MSI+LST+VI,共3种输入特征组合。
(3)增加河流上空大气气溶胶光学厚度和10 m风速的影响,即可形成MSI+AOD、MSI+WS、MSI+AOD+WS,共3种输入特征组合。
(4)同时增加环境因素和大气因素的影响,即可形成MSI+LST+AOD、MSI+LST+WS、MSI+VI+AOD、MSI+VI+WS、MSI+LST+AOD+WS、MSI+VI+AOD +WS、MSI+LSI+VI+AOD+WS,共7种输入特征组合。
将以上14种输入特征组合,作为SVR、RF和MLP模型的输入,在训练集上分别训练DO、COD及NH3-N水质参数的反演模型。
当14种输入特征组合对应的各水质反演模型训练完成之后,使用测试集对模型反演结果的准确性进行测试和评估,选出最佳输入特征组合和对应的水质反演模型,作为模型训练实验的最终结果。
4.2.3 模型鲁棒性评估实验
如果模型的时空鲁棒性较好的话,当输入为不包含在模型训练和测试样本集内的多源遥感及气象数据时,模型反演出的水质参数的统计特征,也应与对应地面监测数据的统计特征相近似。
基于以上假设,分别使用4.1.2中说明的时间未匹配和空间未匹配的数据,开展时间未匹配和空间未匹配实验,以评估反演模型的时空鲁棒性。
因时间、空间未匹配实验缺少地表水质监测数据作为反演结果比较的“真值”,所以采用对比用箱形图表示的实验数据分布的统计特征,以评估模型的时空鲁棒性。同时,将模型训练过程作为时空匹配实验,将其结果的统计特征作为评估反演模型时空鲁棒性的参照。
4.3 评价指标
其中:
5 结果分析
5.1 模型的训练及性能评估结果
5.1.1 最优超参数筛选
经实验筛选出的3种机器学习水质参数反演模型的超参数配置,如表4所示。
表4 3种机器学习水质参数反演模型的最优超参数表
Table 4
| 机器学习模型 | 参数名称 | 非光学活性水质参数 | ||
|---|---|---|---|---|
| DO | COD | NH3-N | ||
| SVR | C | 100 | 10 | 10 |
| gamma | 7 | 3 | 3 | |
| RF | 决策树个数 | 15 | 26 | 15 |
| 树的深度 | 46 | 15 | 10 | |
| MLP | 隐藏层数 | 6 | 5 | 5 |
| 每个隐藏层神经元数 | 100 | 100 | 100 | |
5.1.2 各模型水质参数反演的最优输入特征组合
表5为SVR、RF和MLP模型在14种输入特征组合下的DO、COD和NH3-N水质参数反演结果。从表中可以看到,与仅使用哨兵2的MSI作为输入相比,输入数据中在叠加MODIS、ERA5的数据后,各模型的性能均有所提升。对于不同水质参数,能得到最优反演性能的模型不同,及对应的输入特征组合也不同,具体分析如下:
表5 SVR、RF和MLP模型在14种输入特征组合下的DO、COD和NH3-N反演结果
Table 5
| 序号 | 输入数据 | 指标 | DO | COD | NH3-N | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| SVR | RF | MLP | SVR | RF | MLP | SVR | RF | MLP | |||
| 1 | MSI | R2 | 0.837 | 0.845 | 0.832 | 0.649 | 0.699 | 0.656 | 0.242 | 0.447 | 0.485 |
| MAE/(mg | 0.308 | 0.393 | 0.426 | 0.477 | 0.506 | 0.474 | 0.183 | 0.144 | 0.139 | ||
| RMSE/(mg | 0.402 | 0.384 | 0.414 | 0.594 | 0.513 | 0.612 | 0.100 | 0.071 | 0.066 | ||
| 2 | MSI+VI | R2 | 0.837 | 0.852 | 0.357 | 0.650 | 0.685 | 0.744 | 0.191 | 0.523 | 0.353 |
| MAE/(mg | 0.302 | 0.375 | 0.729 | 0.485 | 0.502 | 0.415 | 0.188 | 0.139 | 0.151 | ||
| RMSE/(mg | 0.407 | 0.366 | 1.711 | 0.596 | 0.537 | 0.444 | 0.106 | 0.063 | 0.080 | ||
| 3 | MSI+LST | R2 | 0.866 | 0.860 | 0.764 | 0.611 | 0.654 | 0.605 | 0.232 | 0.292 | 0.386 |
| MAE/(mg | 0.306 | 0.384 | 0.465 | 0.506 | 0.546 | 0.543 | 0.182 | 0.173 | 0.154 | ||
| RMSE/(mg | 0.336 | 0.347 | 0.594 | 0.654 | 0.592 | 0.703 | 0.100 | 0.092 | 0.078 | ||
| 4 | MSI+VI+LST | R2 | 0.890 | 0.879 | 0.841 | 0.671 | 0.673 | 0.717 | 0.251 | 0.232 | 0.325 |
| MAE/(mg | 0.282 | 0.359 | 0.377 | 0.472 | 0.527 | 0.430 | 0.184 | 0.168 | 0.154 | ||
| RMSE/(mg | 0.274 | 0.300 | 0.397 | 0.560 | 0.558 | 0.491 | 0.098 | 0.096 | 0.084 | ||
| 5 | MSI+AOD | R2 | 0.872 | 0.863 | 0.856 | 0.676 | 0.671 | 0.722 | 0.307 | 0.507 | 0.432 |
| MAE/(mg | 0.300 | 0.363 | 0.368 | 0.470 | 0.514 | 0.435 | 0.165 | 0.139 | 0.143 | ||
| RMSE/(mg | 0.320 | 0.341 | 0.360 | 0.553 | 0.564 | 0.476 | 0.091 | 0.064 | 0.072 | ||
| 6 | MSI+WS | R2 | 0.802 | 0.851 | 0.835 | 0.648 | 0.699 | 0.738 | 0.289 | 0.488 | 0.536 |
| MAE/(mg | 0.344 | 0.385 | 0.377 | 0.464 | 0.495 | 0.431 | 0.172 | 0.143 | 0.129 | ||
| RMSE/(mg | 0.497 | 0.364 | 0.417 | 0.599 | 0.514 | 0.449 | 0.091 | 0.066 | 0.061 | ||
| 7 | MSI+AOD+WS | R2 | 0.868 | 0.829 | 0.733 | 0.704 | 0.669 | 0.781 | 0.334 | 0.529 | 0.502 |
| MAE/(mg | 0.293 | 0.402 | 0.454 | 0.439 | 0.515 | 0.398 | 0.171 | 0.137 | 0.137 | ||
| RMSE/(mg | 0.330 | 0.431 | 0.647 | 0.507 | 0.565 | 0.383 | 0.087 | 0.061 | 0.065 | ||
| 8 | MSI+VI+LST+AOD+WS | R2 | 0.889 | 0.868 | 0.853 | 0.670 | 0.660 | 0.742 | 0.221 | 0.278 | 0.383 |
| MAE/(mg | 0.289 | 0.378 | 0.337 | 0.487 | 0.528 | 0.414 | 0.184 | 0.168 | 0.153 | ||
| RMSE/(mg | 0.278 | 0.332 | 0.367 | 0.564 | 0.578 | 0.445 | 0.099 | 0.092 | 0.079 | ||
| 9 | MSI+LST+WS | R2 | 0.853 | 0.839 | 0.695 | 0.674 | 0.642 | 0.721 | 0.249 | 0.320 | 0.436 |
| MAE/(mg | 0.320 | 0.411 | 0.506 | 0.479 | 0.542 | 0.446 | 0.178 | 0.161 | 0.149 | ||
| RMSE/(mg | 0.371 | 0.404 | 0.780 | 0.557 | 0.618 | 0.482 | 0.099 | 0.087 | 0.073 | ||
| 10 | MSI+LST+AOD | R2 | 0.896 | 0.866 | 0.837 | 0.644 | 0.656 | 0.748 | 0.314 | 0.314 | 0.458 |
| MAE/(mg | 0.276 | 0.369 | 0.368 | 0.506 | 0.543 | 0.438 | 0.175 | 0.165 | 0.143 | ||
| RMSE/(mg | 0.263 | 0.333 | 0.409 | 0.611 | 0.589 | 0.428 | 0.088 | 0.089 | 0.070 | ||
| 11 | MSI+LST+AOD+WS | R2 | 0.891 | 0.872 | 0.857 | 0.707 | 0.646 | 0.736 | 0.273 | 0.226 | 0.381 |
| MAE/(mg | 0.283 | 0.370 | 0.333 | 0.441 | 0.542 | 0.424 | 0.180 | 0.170 | 0.152 | ||
| RMSE/(mg | 0.275 | 0.320 | 0.350 | 0.506 | 0.613 | 0.470 | 0.094 | 0.098 | 0.078 | ||
| 12 | MSI+VI+WS | R2 | 0.835 | 0.831 | 0.817 | 0.677 | 0.690 | 0.764 | 0.217 | 0.482 | 0.293 |
| MAE/(mg | 0.305 | 0.382 | 0.358 | 0.464 | 0.502 | 0.404 | 0.185 | 0.145 | 0.162 | ||
| RMSE/(mg | 0.412 | 0.416 | 0.466 | 0.553 | 0.531 | 0.412 | 0.103 | 0.066 | 0.092 | ||
| 13 | MSI+VI+AOD | R2 | 0.869 | 0.856 | 0.867 | 0.692 | 0.667 | 0.714 | 0.313 | 0.459 | 0.382 |
| MAE/(mg | 0.291 | 0.371 | 0.337 | 0.439 | 0.511 | 0.419 | 0.175 | 0.146 | 0.146 | ||
| RMSE/(mg | 0.324 | 0.360 | 0.337 | 0.529 | 0.571 | 0.498 | 0.088 | 0.069 | 0.077 | ||
| 14 | MSI+VI+AOD+WS | R2 | 0.879 | 0.836 | 0.844 | 0.690 | 0.676 | 0.724 | 0.307 | 0.509 | 0.412 |
| MAE/(mg | 0.291 | 0.396 | 0.344 | 0.452 | 0.502 | 0.409 | 0.177 | 0.139 | 0.145 | ||
| RMSE/(mg | 0.303 | 0.410 | 0.391 | 0.526 | 0.561 | 0.483 | 0.089 | 0.064 | 0.077 | ||
溶解氧(DO):性能最优的模型为SVR,对应的输入特征组合为实验10中的MSI+LST+AOD,其R2为0.896,MAE为0.276 mg/L,RMSE为0.263 mg/L。比只使用哨兵2的MSI作为输入的R2提高7.04%,MAE降低10.39%,RMSE降低34.58%。
化学需氧量(COD):性能最优的模型为MLP,对应的输入特征组合为实验7中的MSI+AOD+WS,其R2为0.781,MAE为0.398 mg/L,RMSE为0.383 mg/L。比只使用哨兵2的MSI作为输入的R2提高19.05%,MAE降低16.03%,RMSE降低37.42%。
氨氮(NH3-N):性能最优的模型为RF,对应的输入特征组合为实验7中的MSI+AOD+WS,其R2为0.529,MAE为0.137 mg/L,RMSE为0.061 mg/L。比只使用哨兵2的MSI作为输入的R2提高18.34%,MAE降低4.86%,RMSE降低14.08%。
5.1.3 各模型在3种水质参数上的最优性能
表6 不同方法的模型能到的最佳水质参数反演性能
Table 6
| 方法 | 指标 | 非光学活性水质参数 | ||
|---|---|---|---|---|
| DO | COD | NH3-N | ||
| MLR | R2 | 0.383 | 0.066 | 0.120 |
| MAE/(mg | 1.027 | 1.046 | 0.251 | |
| RMSE/(mg | 1.650 | 1.561 | 0.132 | |
| SVR | R2 | 0.896 | 0.707 | 0.334 |
| MAE/(mg | 0.276 | 0.441 | 0.171 | |
| RMSE/(mg | 0.263 | 0.506 | 0.087 | |
| RF | R2 | 0.879 | 0.699 | 0.529 |
| MAE/(mg | 0.359 | 0.495 | 0.137 | |
| RMSE/(mg | 0.300 | 0.514 | 0.061 | |
| MLP | R2 | 0.867 | 0.781 | 0.536 |
| MAE/(mg | 0.337 | 0.398 | 0.129 | |
| RMSE/(mg | 0.337 | 0.383 | 0.061 | |
从DO、COD和NH3-N3种水质参数反演性能的平均指标来看,整体上MLP模型的R2最高、MAE和RMSE最低。MLP模型反演结果的R2均大于0.536,与作为参照的传统的MLR模型相比,机器学习方法能显著提高水质参数反演的性能。 RF模型反演结果的相关性第二高,R2均大于0.529,RF模型对DO反演结果的性能要比MLP模型稍好。
5.2 模型的鲁棒性评估结果
5.2.1 时空匹配实验(模型训练和测试实验)结果
图4为3种水质参数时间匹配实验结果的箱形图。图中黑色、灰色,和白色箱形,分别表示实验中所有地面水质监测数据、样本中训练模型用的水质监测数据,和模型用样本中作为测试的多源遥感及气象数据反演得到的水质参数值的统计特征。
图4
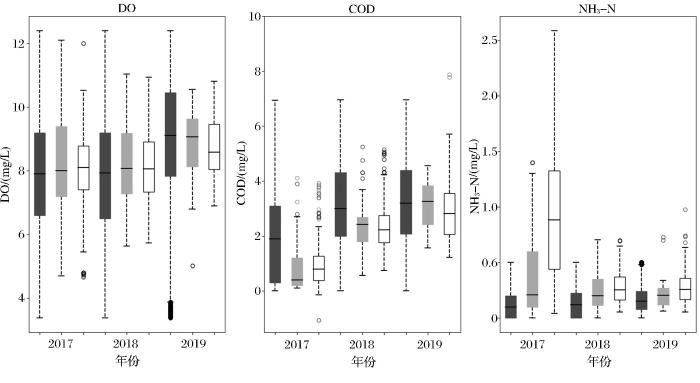
图4
所有地面水质监测数据,样本中的模型训练数据、模型用样本中测试数据反演的水质参数的年度对比箱形图
(黑色箱形代表所有站点的水质监测数据,灰色箱形代表样本中训练反演模型的水质监测数据;白色箱形代表模型用样本中测试数据反演出的水质参数;箱形图中,箱体内的实线表示中位数,箱体的下边缘和上边缘分别表示下四分位数(Q1)和上四分位数(Q3),箱形外的上下横线表示最大值和最小值,o表示异常值)
Fig.4
Annual boxplots of all surface water quality monitoring data, model training data in the sample set, water quality parameters retrieved by the models with test data in the sample set
如果灰色箱形与黑色箱形相似,表示在时空匹配实验中,反演模型训练所用数据的统计特征,与所有地面水质监测数据的统计特征相似,即训练数据的代表性较好。如果白色箱形与灰色箱形相似,表示模型用样本中测试数据反演出的水质参数的统计特征,与样本中训练数据的统计特征相似,即模型得到了合理的训练。如果白色箱形与黑色箱形相似,则表示模型的泛化性较好。
5.2.2 时间未匹配实验结果
图5为3种水质参数时间未匹配实验结果的箱形图。图中黑色、灰色,和白色箱形,分别表示实验中所有地面水质监测数据、时间未匹配的水质监测数据,和模型用时间未匹配的多源遥感及气象数据反演得到的水质参数值的统计特征。
图5
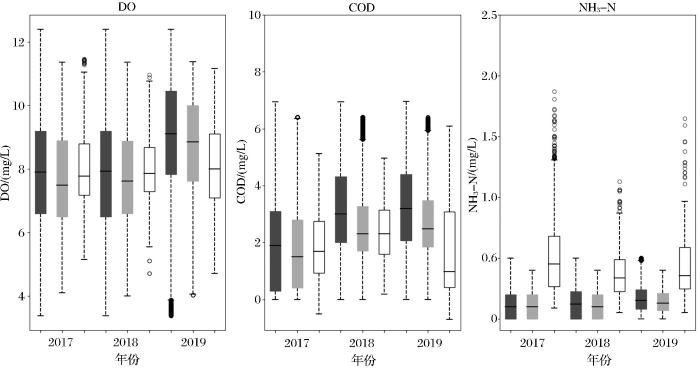
图5
所有地面水质监测数据,时间不匹配的水质监测数据、模型用时间不匹配的多源遥感及气象数据反演的水质参数的年度对比箱形图
(黑色箱形代表所有站点的地面水质监测数据,灰色箱形代表时间不匹配的水质监测数据,白色箱形代表模型用时间不匹配的多源遥感及气象数据反演出的水质参数; 箱形图中,箱体内的实线表示中位数,箱体的下边缘和上边缘分别表示下四分位数(Q1)和上四分位数(Q3),箱形外的上下横线表示最大值和最小值,o表示异常值)
Fig.5
Annual boxplots of all ground-based water quality monitoring data, time-mismatched water quality monitoring data, water quality parameters inverted by the models with time-mismatched multi-source remote sensing data
5.2.3 空间未匹配实验结果
图6为3种水质参数空间未匹配实验结果的箱形图。图中黑色、灰色,和白色箱形,分别表示实验中所有地面水质监测数据、空间未匹配的水质监测数据,和模型用空间未匹配的多源遥感及气象数据反演得到的水质参数值的统计特征。
图6
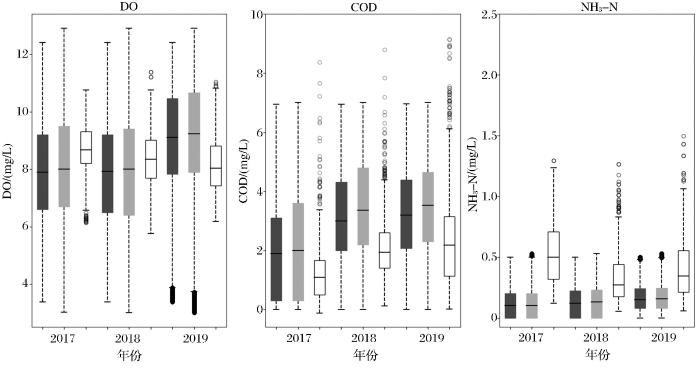
图6
所有地面水质监测数据,空间不匹配的水质监测数据、模型用空间不匹配的多源遥感及气象数据反演的水质参数的年度对比箱形图
(黑色箱形代表所有站点的地面水质监测数据,灰色箱形代表空间不匹配的水质监测数据,白色箱形代表模型用空间不匹配的多源遥感及气象数据反演出的水质参数;箱形图中,箱体内的实线表示中位数,箱体的下边缘和上边缘分别表示下四分位数(Q1)和上四分位数(Q3),箱形外的上下横线表示最大值和最小值,o表示异常值)
Fig.6
Annual boxplots of all ground-based water quality monitoring data, space-mismatched water quality monitoring data, water quality parameters inverted by the models with space-mismatched multi-source remote sensing data
根据表3,空间未匹配的地面水质监测数据量约占到所有地面水质监测数据总量的71%左右,因此灰色箱形与黑色箱形大致相同,表明空间未匹配的地面水质监测数据与所有地面水质监测数据具有基本相同的统计特征。
6 讨 论
6.1 地表温度和植被指数对反演性能的影响
在反演DO、COD和NH3-N时,温度和植被指数是两个重要因素。首先,温度会通过直接或间接的方式影响DO、COD和NH3-N的浓度。对于所研究的3种水质参数,DO主要来源于从大气中转移到水体里的氧气,以及藻类和其他水生植物光合作用产生的氧气[41]。COD作为衡量有机污染物对水污染程度的指标[42],会受到微生物消耗氧气以降解有机物这一过程的影响[11]。而NH3-N会在氧气的参与下被藻类吸收[43]。所以水温会通过影响氧气溶解度的方式[44],进而影响DO、COD和NH3-N的浓度。同时水温也会影响微生物的呼吸和氧化过程[45, 46],导致DO、COD和NH3-N浓度变化。因此在反演水质参数时考虑温度的影响,能够在一定程度上提高模型的精度。
6.2 气溶胶和风速对反演性能的影响
河流上的风速会影响水面的平整度,进而对入、出水辐射造成影响。在反演模型的输入数据中加入风速数据,可以使模型在一定程度上考虑水面平整度的影响,从而改善模型的反演性能。
从表5中可以看到,将气溶胶光学厚度和风速信息加入到模型输入中时,DO、COD和NH3-N的反演精度会有所提高。
6.3 模型的应用
图7

图7
用多源遥感及气象数据反演的一部分长江河和珠江江段的DO,COD,NH3-H水质参数空间分布
Fig.7
Spatial distribution of DO, COD and NH3-H water quality parameters in a part of Yangtze and Pearl River retrieved from multi-source remote sensing data
图7(b)显示的南通西侧长江段,DO和COD的浓度总体上从东向西逐渐增加,西部的双山岛附近COD浓度较高,推测可能是因为双山岛对岸分布着工业区和码头,工业活动和船舶活动导致附近水质较差。另外,COD和NH3-N在东北部岛屿附近的长江支流处,均出现了较高值。该长江支流北岸分散着几处农田,而南岸的岛屿又分布着居民区、度假村、工业区等,因此推测该狭长地带两岸较为活跃的人类活动,影响了流经此处的长江支流的水质。
7 结 论
本文基于多源遥感卫星数据,利用全国主要流域地表水水质监测站观测数据,建立了基于机器学习的反演模型。其中选择对DO、COD和NH3-N 3种非光学活性水质参数进行研究,并为每种水质参数选择最佳的输入特征组合。结果显示基于机器学习的模型比传统的多元线性回归模型更能捕捉到反演非光学活性参数所需要的多源遥感以及气象数据的线性和非线性关系。通过实验证明,当样本的代表性与全局水质数据较为接近时,反演模型的时间和空间鲁棒性都比较好。另外对输入特征组合进行分析,发现对于溶解氧的反演,温度和反映植被动态的植被指数较为重要;对于化学需氧量和氨氮,影响反射率的风速和气溶胶更能够提高模型的性能。在未来的工作中,计划将风速数据的降尺度操作进行更精细的模拟,以在本研究的基础上进一步提高水质参数的反演效果,为遥感水质监测和水质分析提供有用的借鉴信息。
参考文献
Uncertainty analysis of inland water quality remote sensing: A renew
[J].
内陆水质遥感不确定性:问题综述
[J].
Quantification of chlorophyll-a in typical lakes across China using Sentinel-2 MSI imagery with machine learning algorithm
[J].
Suitability of the retrieval models for estimating chlorophyll concentration in Lake Taihu
[J].
太湖水体叶绿素浓度反演模型适宜性分析
[J].
Remote estimates of total suspended matter in China's main estuaries using Landsat images and a weight random forest model
[J].
Remote sensing estimation of total suspended matter concentration in Xin'anjiang reservoir using Landsat 8 data
[J].
基于Landsat 8影像估算新安江水库总悬浮物浓度
[J].
Optical characterization of black water blooms in eutrophic waters
[J].
A review of remote sensing for water quality retrieval: Progress and challenges
[J].
Water quality monitoring using remote sensing and an artificial neural network
[J].
Applying support vector regression to water quality modelling by remote sensing data
[J].
Remote Estimation of Water Quality Parameters of Medium- and Small-Sized Inland Rivers Using Sentinel-2 Imagery
[J].
A machine learning-based strategy for estimating non-optically active water quality parameters using Sentinel-2 imagery
[J].
Deep learning-based water quality estimation and anomaly detection using Landsat-8/Sentinel-2 virtual constellation and cloud computing
[J].
Validity evaluation of a machine-learning model for chlorophyll a retrieval using Sentinel-2 from inland and coastal waters
[J].
Google Earth Engine: Planetary-scale geospatial analysis for everyone
[J].
Sentinel-2: ESA's optical high-resolution mission for GMES operational services
[J].
National surface water quality monitoring data
[DB].
国控地表水水质监测数据
[DB].
Sentinel-2 level 2A prototype processor: Architecture, algorithms and first results
[C]∥
G. MOD11A1 MODIS/Terra Land Surface Temperature/Emissivity Daily L3 Global 1km SIN Grid V006
[C]∥ NASA EOSDIS L
G. MYD11A1 MODIS/Aqua Land Surface Temperature/Emissivity Daily L3 Global 1km SIN Grid V006
[C]∥ NASA EOSDIS L
MOD13Q1 MODIS/Terra Vegetation Indices 16-Day L3 Global 250m SIN Grid V006
[DS].
MYD13Q1 MODIS/Aqua Vegetation Indices 16-Day L3 Global 250m SIN Grid V006
[DS].
MCD19A2 MODIS/Terra+Aqua Land Aerosol Optical Depth Daily L2G Global 1km SIN Grid V006
[DS].
Fine-resolution mapping of pan-arctic lake ice-off phenology based on dense sentinel-2 time series data
[J].
A fast algorithm for the minimum covariance determinant estimator
[J].
Adaptive and learning systems for signal processing communications, and control
[J].
Water quality inversion and eutrophication assessment of The South China Sea based on GEE
[J].
基于GEE的中国南海水质反演与富营养化评价
[J].
EEstimation of Dependence Based on Empirical Data
[M].
Completing the machine learning saga in fractional snow cover estimation from MODIS Terra reflectance data:Random forests versus support vector regression
[J].
Approximation capabilities of multilayer feedforward networks
[J].
Some new results on neural network approximation
[J].
W. Aspects of the numerical analysis of neural networks
[J].
Multilayer feedforward networks are universal approximators
[J].
Hyperopt Sk-learn: Automatic Hyperparameter Configuration for Scikit Learn
[J].
Identifying the Parameters of the Kernel Function in Support Vector Machines Based on the Grid[1]Search Method
[J].
基于网格搜索的支持向量机核函数参数的确定
[J].
A note on a general definition of the coefficient of determination
[J].
Stack filters and the mean absolute error criterion
[J].
Estimating the uncertainty in estimates of root mean square error of prediction: application to determining the size of an adequate test set in multivariate calibration
[J].
A Remote Sensing Method to Inverse Chemical Oxygen Demand in Qinghai Lake
[C]∥ Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, F,
Discussion on the Treatment of Eutrophic Water by Algae Membrane
[J].
关于藻类膜处理富营养化水体的探讨
[J].
Application of satellite remote sensing in monitoring dissolved oxygen variabilities: A case study for coastal waters in Korea
[J].
Water quality and chlorophyll measurement through vegetation indices generated from orbital and suborbital images
[J].
Recent advances on the treatment technologies of ammonia-nitrogen wastewater
[J].
氨氮废水处理技术研究进展
[J].
Spectral analysis using LANDSAT images to monitor the chlorophyll-a concentration in Lake Laja in Chile
[J].
Hybrid approach of Unmanned Aerial Vehicle and Unmanned Surface Vehicle for assessment of chlorophyll-a imagery using spectral indices in Stream, South Korea
[J].
Atmospheric correction for remotely-sensed ocean-colour products
[R].
Assessment of atmospheric correction algorithms for the Sentinel-2A MultiSpectral Imager over coastal and inland waters
[J].
Inversion and driving force analysis of nutrient concentrations in the ecosystem of the Shenzhen-Hong Kong Bay Area
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}