




1 引 言
中国古建筑具有悠久历史和文化价值,而且以它独特风格,在中国传统社会中起着重要的社会凝聚作用,在世界建筑史上占有重要地位,有着极高的艺术成就和科学价值,保护意义重大。古建筑和其他一切历史文物一样,其价值就在于它是历史上遗留下来的文化遗产,不能再生产与建造,一经破坏就无法挽回,是传统社会文化精神的物质表现形式,蕴含着丰厚的历史价值 [ 1] 。进入新时期,宗族家庙承载着宗族文化的传承与延续,具有较高的文化价值和研究价值,因此,宗族家庙的保护显得尤为重要。
渐山李氏家庙位于福建省龙海市东泗乡渐山村,建于清朝光绪年间。建筑主体由北向南布局,总建筑面积420 m 2,依次为前殿、天井、廊间、后殿。随着渐山村入选中国传统村落名录,2019年由乡贤组织该古建筑修复重建。传统人工点位测量的方法,无法完整记录建筑物信息,且在测量过程中可能对建筑造成损坏,因此,亟需一种快速、非接触式方法对古建筑进行信息提取与三维建模。
近年来,无人机倾斜摄影测量技术得到迅速发展,该技术能够弥补三维激光扫描技术的扫描盲区并实现真实地物全方位立体化建模,如任诚等 [ 6] 、廖玉佳等 [ 7] 分别基于无人机倾斜摄影进行建筑物三维建模,均表明该技术能够获取高精度、真实、可量测的三维模型。李金香等 [ 8] 、褚杰等 [ 9] 的相关研究表明,倾斜摄影模型可从多个角度观察地物,更加真实地反映地物的实际情况,同时大幅提高建模效率。然而,仅仅采用三维激光扫描技术或无人机倾斜摄影测量技术中的单一技术只能获取建筑或目标对象的部分特征信息,而不能获取目标对象立面和顶部的完整信息。因此,针对本文的古建筑建模,需要利用三维激光扫描技术获取古建筑室内外高精度三维信息 [ 10] ,同时需要利用无人机倾斜摄影测量技术快速获取古建筑顶部信息。目前,虽然出现了一些联合两种技术进行应用的案例,如徐凡等 [ 11] 综合利用航拍影像和LiDAR数据优势进行城市地物分类研究,但尚无有关将这两种技术相结合应用于古建筑三维建模的报道。
基于此,本研究以渐山李氏家庙为研究对象,联合三维激光扫描与倾斜摄影测量技术的新方法对古建筑进行数据获取;其次经过数据处理与多源数据融合,完成古建筑二维信息提取与三维模型重建;最后采用3D打印技术制作渐山李氏家庙不同比例尺的实体模型,还原李氏家庙的建筑信息与模型。
2 数 据
2.1 古建筑点云数据获取
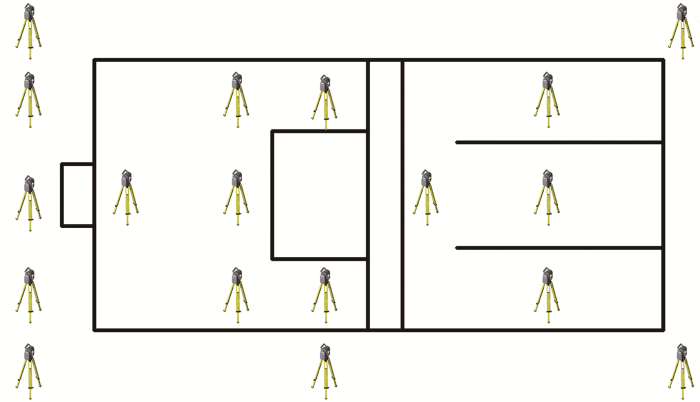
三维激光扫描仪主要是由激光测距和激光扫描系统构成,通过发射激光脉冲获取物体表面点云数据。本研究采用天宝SX10三维扫描仪进行数据获取,为确保古建筑点云数据具有较高精度与完整性,经过对建筑布局和结构实地勘查后共采集18个站点数据,包括建筑内部10个及外部8个。其中,古建筑内部纹理细节复杂,相邻扫描站点确保距离不大于5 m,重叠率不低于50%。古建筑外部附近房屋较为密集,外部扫描时重叠率不低于30%。选择标准扫描(50 m处的点间隔12.5 mm),扫描范围360°×300°,所用时间约50 min,每站点云数量约3×10 7个。扫描仪站点位置示意图,如 图1所示。
图1
2.2 古建筑倾斜摄影数据获取
本研究采用大疆Phantom 4 RTK无人机进行免像控古建筑倾斜摄影数据获取(如 图2)。飞行器搭载1英寸CMOS,有效像素2 000万,在定位模式中的航行速度50 km/h;在RTK导航定位模块,提供实时厘米级定位数据,提升图像元数据精度。本次研究区域获取无人机倾斜摄影面积为0.04 km 2,实际航摄及建模区域面积为420 m 2,航拍区域如 图2所示,无人机的航线布设为东西方向,相机镜头角度为-45°,像片航向重叠度大于80%,旁向重叠度大于80%。本研究共获取472个影像,其中458片为有效影像,用时为3 h。通过飞行高度(H)和地面分辨率(GSD)的关系式,如公式(1)所示,可计算飞行最佳高度。
图2

总之,结合三维激光扫描与无人机倾斜摄影测量各自特点及优势。古建筑数据获取可分为三部分:古建筑室内采用地面三维激光扫描仪获取高精度点云数据;古建筑屋顶部分由无人机低空摄影测量获取建筑倾斜模型数据;古建筑外立面则是由两种技术共同获取数据,其中檐口以下部分地面三维激光点云数据质量较高,檐口以上部分无人机摄影测量数据更完整。两种数据进行融合可获取完整的、全方位的古建筑空间数据信息。
3 方 法
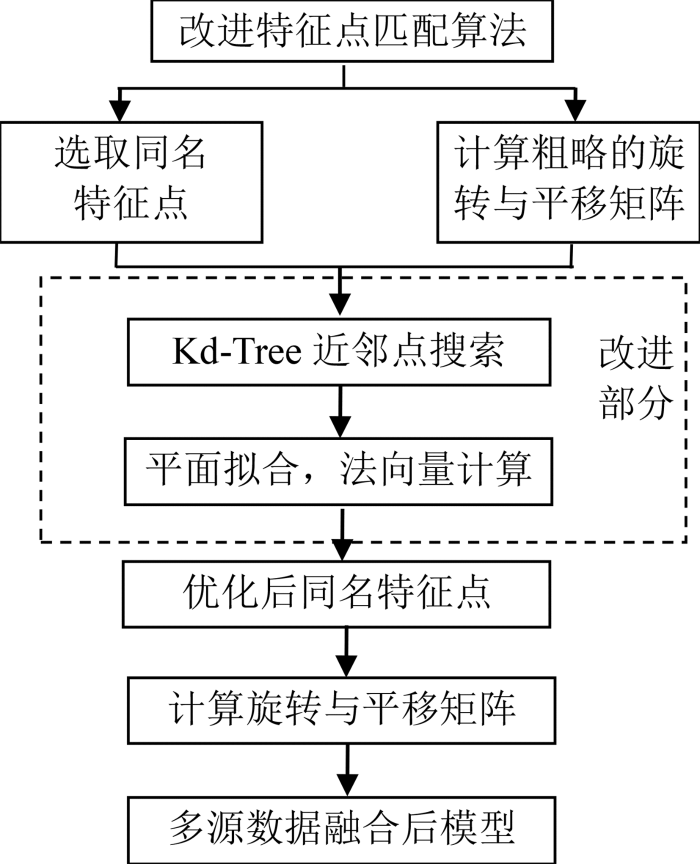
本研究联合三维激光扫描与倾斜摄影测量技术的新方法对古建筑进行数据获取;基于特征点匹配算法对激光点云数据与倾斜摄影数据进行多源数据融合,来获取古建筑完整的空间数据模型;其次,进行古建筑三维模型构建,并采用3D打印实体模型。最后,获取高精度、完整的古建筑三维模型。数据处理技术路线如 图3所示。
图3
3.1 点云数据处理
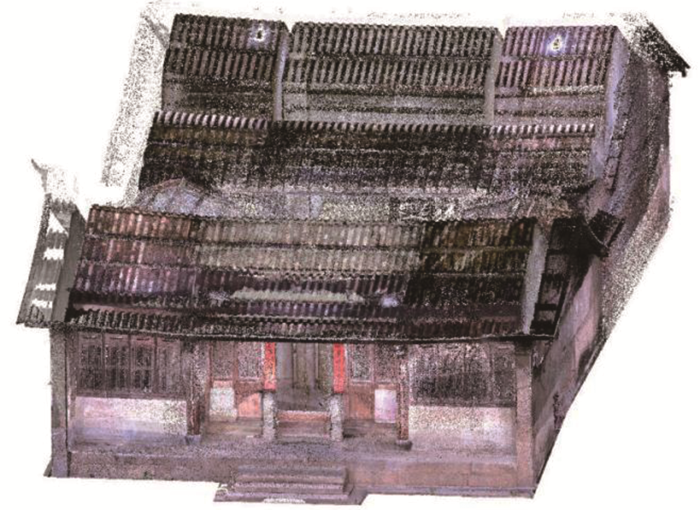
三维激光扫描获取的数据量大,站点多,需对数据进行配准拼接、纹理映射及去噪滤波等系列处理后再进行模型构建。首先,将点云数据和影像数据进行融合;其次,对各个测站点云数据进行配准,配准时相邻测站之间的残差不大于2 mm。本研究点云数据配准的结果为点云到点云误差为1 mm,每个测站之间的配准误差≤ 2 mm,置信水平均≥ 50%,该精度达到古建筑重建要求。最后,对点云进行去噪滤波处理,原始点云数据包含了古建筑外的不必要噪点数据,如室内移动物体产生的噪声点,室外的树木、电线与其他房屋等,剔除古建筑之外的噪声点以及建筑内部不需要的点云数据,只保留古建筑主体。通过以上处理后可得到渐山李氏家庙的激光点云数据模型,如 图4所示。
图4
3.2 倾斜数据处理
倾斜影像数据在生成模型前对倾斜数据影像进行匀光匀色等几何处理。在空中三角测量计算时,由于获取的古建筑倾斜数据摄影倾角大,影像变形大,尺度无法统一,重叠数多,需要多视处理等特点,使其空中三角测量异于常规数码航空摄影测量方式。本研究采用支持垂直影像和倾斜影像同时导入参与计算的光束法进行局域网平差空中三角测量,以获取拍摄时的空间位置与姿态信息。通过多视影像密集匹配处理,可运算生成基于倾斜摄影真实影像的超高密度点云,并以此生成基于真实影像的高分辨率实景真三维模型。
倾斜模型的生成存在匹配错误、瑕疵与漏洞的问题,可通过模型精修提升模型质量,再对修正后的模型进行纹理映射,获取准确的三维模型数据。
3.3 点云数据与倾斜数据融合
由于地面三维激光扫描仪无法获取古建筑檐口及檐口上部的数据,且古建筑四周房屋密布,导致无人机获取的建筑侧面的影像数据较少,生成倾斜模型数据,建筑屋檐部分的数据质量差,存在拉花及破洞现象。为获取满足精度要求的建筑信息,本研究将激光点云数据与倾斜数据进行融合,得到满足要求的古建筑三维模型数据。
研究是采用基于改进特征点配准算法进行数据融合,即在激光点云数据模型和倾斜摄影测量模型数据,其特征点匹配算法基本原理主要通过手动选取同名特征点计算旋转矩阵和平移矩阵,而本文则是在其基础上先通过Kd-Tree近邻点搜索算法来计算其拟合平面的法向量,进行约束选取的同名特征点是否可行,从而对不可用的同名点进行剔除,来优化同名点,使得计算的得到变换矩阵更加准确,从而使配准精度更高,主要过程如下:
(1)先通过手工提取同名特征点对,计算求解旋转矩阵R1和平移矩阵T1对两者数据进行粗拼接。
(2)对粗拼接后的数据,利用Kd-Tree近邻点搜索算法,先获取M个与点T(x,y,z)距离最近的数据点,利用这M个点云坐标建立点T的最小二乘面,计算最小二乘面的法向量
(3)同样利用Kd-Tree近邻点搜索方法,从两者数据中各获取M/2个与点T(x, y, z)距离最近的数据点,构建点T的最小二乘面,计算最小二乘面的法向量
(4)分别计算法向量
基于特征点配准算法步骤如下:在两种数据融合过程中,设激光点云数据原始坐标是
其中:
根据得到的转换矩阵的数值,将倾斜摄影模型
因此,本研究采用基于特征点配准算法进行数据融合来获得较高精度的古建筑檐口模型数据。通过本研究的算法计算融合后,激光点云数据模型在建筑屋顶缺失的数据,以及倾斜摄影数据模型中的拉花与破洞现象均得到改善,最后,多源数据融合前后对比,如 图5所示。
图5
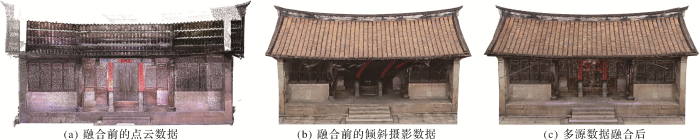
图5
多源数据融合前后对比
Fig.5
The comparison diagram before and after the multi-source data fusion
4 结果与讨论
4.1 结 果
4.1.1 多源数据融合结果
图6
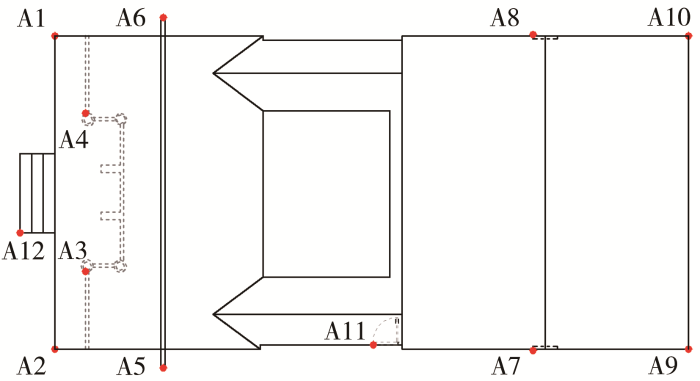
表1 多源数据融合精度结果(单位:m)
Table 1
| 测点 | 坐标 | 点云模型(S 1) | 融合后模型(S 2) | Δ=S 1-S 2 | ΔS | 测点 | 坐标 | 点云模型(S 1) | 融合后模型(S 2) | Δ=S 1-S 2 | ΔS |
|---|---|---|---|---|---|---|---|---|---|---|---|
| A1 | X | 2 692 832.07 | 2 692 832.08 | -0.01 | 0.014 | A7 | X | 2 692 855.60 | 2 692 855.61 | -0.01 | 0.017 |
| Y | 575 152.83 | 575 152.83 | 0 | Y | 575 152.09 | 575 152.08 | 0.01 | ||||
| Z | 31.49 | 31.50 | -0.01 | Z | 32.32 | 32.31 | 0.01 | ||||
| A2 | X | 2 692 840.39 | 2 692 840.40 | -0.01 | 0.017 | A8 | X | 2 692 848.20 | 2 692 848.20 | 0 | 0.014 |
| Y | 575 164.08 | 575 164.07 | 0.01 | Y | 575 142.10 | 575 142.09 | 0.01 | ||||
| Z | 31.53 | 31.54 | -0.01 | Z | 31.98 | 31.97 | 0.01 | ||||
| A3 | X | 2 692 839.31 | 2 692 839.31 | 0 | 0.010 | A9 | X | 2 692 861.80 | 2 692 861.79 | 0.01 | 0.030 |
| Y | 575 159.88 | 575 159.88 | 0 | Y | 575 148.16 | 575 148.14 | 0.02 | ||||
| Z | 29.18 | 29.19 | -0.01 | Z | 32.18 | 32.16 | 0.02 | ||||
| A4 | X | 2 692 835.87 | 2 692 835.87 | 0 | 0.014 | A10 | X | 2 692 853.94 | 2 692 853.94 | 0 | 0.022 |
| Y | 575 155.22 | 575 155.23 | -0.01 | Y | 575 137.63 | 575 137.62 | 0.01 | ||||
| Z | 29.16 | 29.15 | 0.01 | Z | 32.01 | 31.99 | 0.02 | ||||
| A5 | X | 2 692 844.50 | 2 692 844.51 | -0.01 | 0.017 | A11 | X | 2 692 851.00 | 2 692 851.01 | -0.01 | 0.017 |
| Y | 575 161.66 | 575 161.65 | 0.01 | Y | 575 155.47 | 575 155.46 | 0.01 | ||||
| Z | 34.58 | 34.57 | 0.01 | Z | 30.22 | 30.21 | 0.01 | ||||
| A6 | X | 2 692 835.86 | 2 692 835.86 | 0 | 0.014 | A12 | X | 2 692 836.47 | 2 692 836.47 | 0 | 0.010 |
| Y | 575 149.70 | 575 149.71 | -0.01 | Y | 575 160.35 | 575 160.36 | -0.01 | ||||
| Z | 34.59 | 34.58 | 0.01 | Z | 27.29 | 27.29 | 0 |
本研究计算结果,最大点位误差为3.00 cm,最小点位误差为1.00 cm,平均点位误差为1.60 cm。由于倾斜摄影测量数据分辨率为厘米级,因此,可得本研究多源数据融合后的误差较小。
4.1.2 古建筑二维信息提取
根据数据处理后得到的点云模型、倾斜模型、多源数据融合的数据模型,进行建筑平面图与立面图的信息提取。基于高精度的点云模型提取古建筑内立面、外立面和建筑内部平面图等二维信息;基于倾斜模型绘制古建筑屋檐以上区域的平面斜面图;利用点云数据与倾斜数据融合的多源数据模型可提取古建筑屋檐和檐口等建筑细节信息。首先,运用处理好的模型数据可得到建筑物任意一个角度的视图。根据建筑外立面、内立面和俯视面的模型数据构建其正射影像,并进行古建筑各类立面图和平面图的二维信息提取 [14] 。
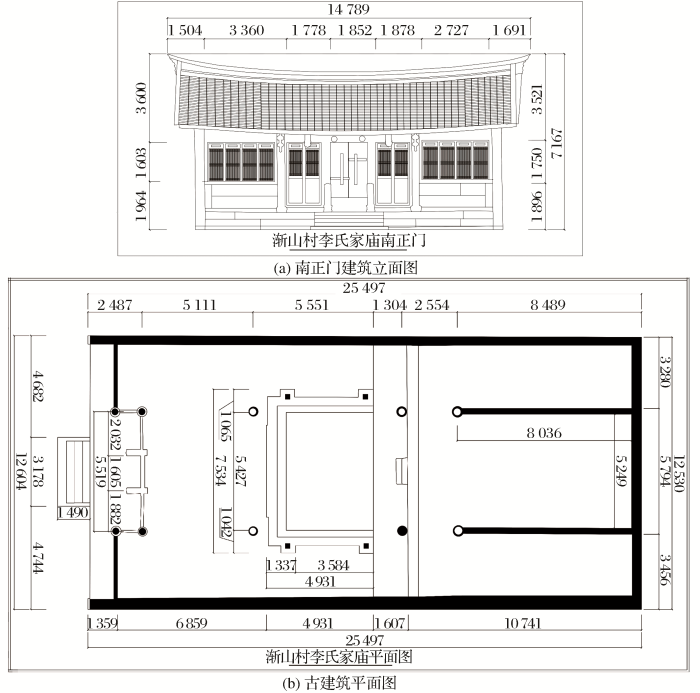
其次,由于模型数据具有精确的三维空间坐标值,可根据正射影像提取的建筑轮廓和建筑结构,计算出古建筑任意点之间的距离,及各类建筑结构的关系和不同建筑材料用量等信息,为古建筑修复和重建提供可靠、精确的空间坐标信息,古建筑物立面与平面图,如 图7所示。
图7
4.1.3 古建筑三维建模与3D打印
古建筑三维建模,主要包括以下几个步骤:
首先,在基于高精度的点云数据提取的各个立面图进行拼接,并根据建筑物的特征线构建白模 [15] 。
图8
3D打印是将三维模型空间形态按比例完全精确无损地进行三维实体呈现,对于复杂的古建筑三维模型来讲,其优势更加凸显,可高效率地制造复杂的实体模型,用于文物修好与监测。本研究采用聚合物材料进行打印,这种材料易成型、较经济,具有良好的延展性和抗冲击性。模型打印时间受模型大小、精细程度和打印质量等因素影响。
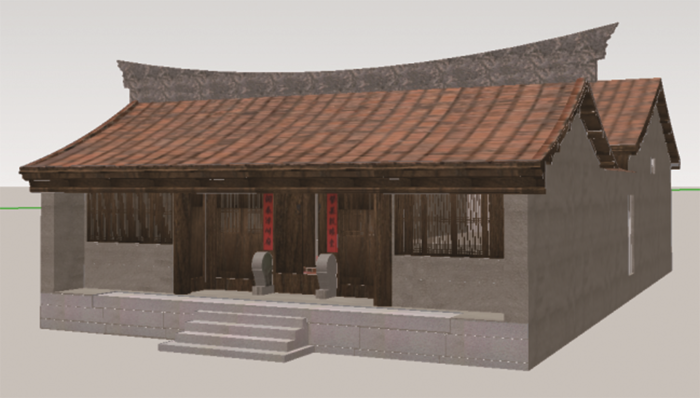
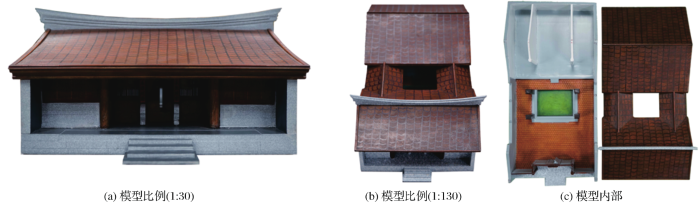
此外,模型打印前,需预检查模型结构是否稳固,对不稳固的情况需要设置模型所加强的位置。本研究打印两种不同大小的三维模型,比例尺分别为1∶30和1∶130,根据模型需要将模型屋顶部分分开打印,便于观察古建筑模型内部细节。3D打印完成的三维模型,如 图9所示。从图中可知,该3D打印模型完整、真实地还原了李氏家庙古建筑精确的三维模型,可进行直观地展示,对古建筑的修复保护与宗族文化的传播具有积极作用。
图9
4.2 讨 论
4.2.1 建模精度对比
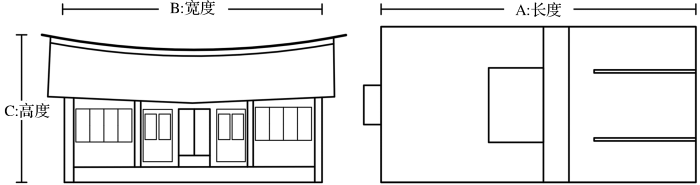
对于三维建模而言,精度验证是必不可少。为验证模型精度,本研究采用实际的Leica-d2激光测距仪的实际测量长度和所构建的模型比较来验证精度结果,分别选取古建筑模型的侧面长度,正面宽度、建筑高、窗户宽、正门宽、台阶高、石板长与侧门宽共8个对象与实际激光测距仪数据对比(如 图10)。本研究采用误差和相对中误差来对目标对象进行精度对比分析。
图10
本研究三维模型的8个对象精度验证结果如 表2所示。可得本研究构建的建筑物三维模型的8个对象多次观测对比的平均差值
表2 三维模型精度验证
Table 2
| 对象 | 实测长度(S 1)/m | 模型长度(S 2)/m | 误差ΔS=S 1-S 2/mm | 对象 | 实测长度(S 1)/m | 模型长度(S 2)/m | 误差ΔS=S 1-S 2/mm |
|---|---|---|---|---|---|---|---|
| 侧面长 | 25.499 | 25.495 | 4 | 正门宽 | 1.518 | 1.510 | 8 |
| 25.494 | 25.499 | -5 | 1.518 | 1.513 | 5 | ||
| 25.503 | 25.497 | 6 | 1.514 | 1.518 | -4 | ||
| 25.497 | 25.493 | 4 | 1.515 | 1.519 | -4 | ||
| 25.495 | 25.499 | -4 | 1.513 | 1.516 | -3 | ||
| 25.502 | 25.499 | 3 | 1.518 | 1.513 | 5 | ||
| 4.33 | 4.83 | ||||||
| δ | 4.43 | δ | 5.08 | ||||
| 正面宽 | 12.610 | 12.606 | 4 | 台阶高 | 0.639 | 0.636 | 3 |
| 12.607 | 12.607 | 0 | 0.634 | 0.632 | 2 | ||
| 12.606 | 12.599 | 7 | 0.631 | 0.637 | -6 | ||
| 12.611 | 12.608 | 3 | 0.634 | 0.639 | -5 | ||
| 12.608 | 12.609 | -1 | 0.636 | 0.633 | 3 | ||
| 12.609 | 12.595 | 14 | 0.635 | 0.640 | -5 | ||
| 4.83 | 4.00 | ||||||
| δ | 6.72 | δ | 4.24 | ||||
| 建筑高 | 7.171 | 7.172 | -1 | 石板长 | 9.275 | 9.279 | -4 |
| 7.175 | 7.168 | 7 | 9.287 | 9.282 | 5 | ||
| 7.173 | 7.164 | 9 | 9.289 | 9.281 | 8 | ||
| 7.170 | 7.173 | -3 | 9.288 | 9.283 | 5 | ||
| 7.173 | 7.167 | 6 | 9.289 | 9.284 | 5 | ||
| 7.172 | 7.170 | 2 | 9.279 | 9.272 | 7 | ||
| 4.67 | 5.67 | ||||||
| δ | 5.48 | δ | 5.83 | ||||
| 窗户宽 | 0.556 | 0.553 | 3 | 侧门宽 | 0.666 | 0.658 | 8 |
| 0.557 | 0.559 | -2 | 0.661 | 0.666 | -5 | ||
| 0.553 | 0.554 | -1 | 0.667 | 0.661 | 6 | ||
| 0.552 | 0.555 | -3 | 0.665 | 0.667 | -2 | ||
| 0.559 | 0.552 | 7 | 0.658 | 0.662 | -4 | ||
| 0.553 | 0.556 | -3 | 0.667 | 0.665 | 2 | ||
| 3.17 | 4.50 | ||||||
| δ | 3.67 | δ | 4.98 | ||||
其次,计算相对中误差
其中: Δ= Δs, n为观测的次数。本研究 n取6,相对中误差的计算结果,如 表2所示。可得建筑物三维模型的8对象的相对中误差分别为4.43、6.72、5.48、3.67、5.08、4.24、5.83和4.98 mm,8个对象平均的相对中误差为5.05 mm。可得本研究各对象的相对中误差较小。综上,由误差与相对中误差的精度分析,本研究提出改进特征点匹配算法来实现多源数据精确融合,实现古建筑三维模型的构建,精度比较高,符合建模精度的要求。
由于本研究构建的古建筑三维模型立面数据是来源于高精度的点云数据提取。由误差和相对中误差计算结果也可得模型精度上均达到毫米级。因此,本研究构建的三维模型具有高精度性。
4.2.2 建模效率分析
为验证基于本研究的三维建模比传统测量手段更加高效,对建模效率进行分析。古建筑的激光点云数据共采集18站,单站扫描时间50 min,共约15h;无人机倾斜摄影测量获取数据同步进行,用时约3 h。由于三维激光可全天候观测,因此,数据获取只需1 d可完成。激光点云数据的配准拼接、去噪简化处理,倾斜摄影测量数据的空三计算等、以及点云数据与倾斜摄影数据的多源数据融合总共5 h,建筑平面图与立面图提取绘制约3 h。由于古建筑的正门结构、门窗及内部结构复杂,导致后期三维实体建模时,需要一些时间对模型进行细致处理;但三维激光与倾斜摄影均采集建筑的影像,节省纹理获取时间。最终,本研究共使用3 d完成古建筑三维模型构建。
采用传统手工建模依靠人工使用卷尺或激光测距仪只采集获取建筑尺寸信息用时3 d;其次,由于采集获取的建筑信息有限,后续建筑三维建模所需时间大大增加,采用传统手工建模大约需要1周时间。可得,传统建模费时费力且获得的数据效率低;而且手工测量过程中,频繁接触古建筑的各个部件,容易对古建筑造成损坏。
因此,采用本研究方法的建模效率比传统方法高效,且三维激光点云数据和无人机倾斜摄影数据的直观性可降低建模过程中内外业的出错率,避免了传统方法对于建筑部件的局部数据缺失而返回现场补充量测数据的成本。同时,三维激光点云数据与无人机倾斜摄影测量获取的古建筑数据更加丰富且完整,是可存档的原始三维空间模型数据,可为科研人员进行后续研究提供最原始的数据支撑。综上所述,本研究方法进行古建筑三维模型构建,具有较大的效益性。
5 结 语
本文以中国传统村落渐山村李氏家庙为研究对象,利用三维激光扫描技术和倾斜摄影技术相结合的非接触式测量技术开展了古建筑的全方位、精细化三维建模应用研究,得到以下3点结论:
(1)提出利用改进特征点匹配算法来实现多源数据精确融合,可快速获取古建筑完整的、全方位三维空间数据,为古建筑建模提供数据支撑。
(2)本研究构建的激光点云数据与倾斜摄影测量数据的融合精度的平均误差为1.6 cm,数据融合精度较高,表明多源数据融合具有较高准确性。
(3)构建的三维模型与实际测量相比,构建的三维模型的8个对象的相对中误差分别为4、7、5、4、5、4、6和5 mm,平均值为5 mm,满足精确建模精度要求;且模型各对象的相对中误差较小,建模精度较高。
应用结果表明,本研究可为古建筑修复提供精细化、全方位、完整二维信息及三维模型的数据支撑;且通过3D打印模型可直观地展示,对古建筑修复保护与宗族文化传播具有积极作用。本研究尚存在问题有:数据量大且冗余数据较多给后期处理带来不便,以及部分复杂结构提取效果有待提高。今后的发展方向是提高信息提取能力;构建多源数据实时采集、传输及信息提取一体化的大数据平台,进一步增强数据采集、信息提取及存档价值。
参考文献
Analysis of the Contemporary Value of Ancestral Hall Culture
[J].
周博,何涛见
宗祠文化的当代价值分析
[J].
Construction Measurement and Analysis of Multi-functional Pneumatic based on the Laser Scanned Point Cloud Data
[J].
郑渊茂,何原荣,余建伟
激光点云的多功能风洞施工量测与分析
[J].
Laser Scanning the Garisenda and Asinelli Towers in Bologna (Italy): Detailed Deformation Patterns of Two Ancient Leaning Buildings
[J].
Research on Classification on Land Cover based on LiDAR Cloud and Aerial Images
[J].
徐凡,张雪红,石玉立
基于激光雷达和航拍影像的城市地物分类研究
[J].
Three-dimensional Modeling of Hakka Earth Buildings based on the Laser Scanned Point Cloud Data
[J].
化蕾
基于激光点云数据的客家土楼三维建模
[J].
Automatic Extraction of Forest Tree Height and DBH based on Ground Lidar Point Cloud Data and 3D Reconstruction
[J].
骆钰波
基于地面激光雷达点云数据的森林树高、胸径自动提取与三维重建
[J].
Extraction of Buildings Feature from Laser Scanning Data
[J].
李必军,方志祥,任娟
从激光扫描数据中进行建筑物特征提取研究
[J].
Construction of 3D Model based on Tilting Photography of Low Altitude UAV
[J].
廖玉佳,胡勇,叶涛
基于低空无人机倾斜摄影的三维模型构建
[J].
Application of UAV Tilt Photogrammetry in Urban 3D Modeling and 3D Data Updating
[J].
褚杰,盛一楠
无人机倾斜摄影测量技术在城市三维建模及三维数据更新中的应用
[J].
3D Scene Simulation based on Laser Scanning Data
[J].
路兴昌
基于激光扫描数据的三维场景仿真
[J].
Analysis of Digital Technology in Ancient Building Protection
[J].
王慧贤
古建筑保护中的数字化技术分析
[J].
A Probe into the Air-Ground Coordination Method for Historic Building Surveying and Mapping——Analysis and Summary of Beijing Shouhuang Palace Complex Surveying Project
[J].
闫宇
“空地协同”的古建筑测绘方法初探——北京寿皇殿建筑群实施案例分析和总结
[J].
Production and Quality Analysis of 3D City Modeling Using Oblique Photogrametric Technology
[J].
王丙涛,王继
基于倾斜摄影技术的三维建模生产与质量分析
[J].
3D Information Acquisition and Analysis of Building Damage based on Laser Point Cloud——A Case Study from Meranti Typhoon
[J].
何原荣
基于激光点云的建筑灾损三维信息获取与分析——以“莫兰蒂”超强台风为例
[J].
Reconstruction of 3D Model of Building Real Scene based on Sketch Up
[J].
王涛
基于Sketch Up的建筑物实景三维模型重建
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}