基于卫星遥感图像的农作物分类算法
3
2020
... 森林是地球碳循环的重要组成部分,有助于维持碳平衡、保持生物多样性、减缓气候变化[1-3].目前森林对于人为干扰和气候变化等因素愈加敏感,而且其自身的维稳能力也越来越差,发生森林火灾、虫害、干旱等灾害的频率逐年上升[4-5].为此,林业部门需要及时制订合理的森林资源管理政策并采取有针对性的措施[6]. ...
... 森林生物量定义为某一时刻单位面积内实存有机物质(干重)总量,估算地上生物量和蓄积量的主要目的是合理管控生态系统,并且评价一个地区的碳储量[3].蓄积量是单位面积内单木材积量的总和.二者都是特定地域的土壤、气候和地形因素之间相互作用的结果,因此在计算方式上不同地区有一定的差异[1].对于单木而言,其生物量和蓄积量往往是通过树高和胸径二者结合计算得到的[4].估算方式有两种:一种是建立异速生长方程,一种是建立回归模型. ...
... (1)异速生长方程:以单木树高和胸径作为参量的函数表达式,通常用于处理实地测量数据[1],由于生物量受树种、气候等因素的影响,不同树种、不同区域的函数表达式都不同[3].异速生长方程还被广泛用于野外实测生物量的统计计算[4]. ...
基于卫星遥感图像的农作物分类算法
3
2020
... 森林是地球碳循环的重要组成部分,有助于维持碳平衡、保持生物多样性、减缓气候变化[1-3].目前森林对于人为干扰和气候变化等因素愈加敏感,而且其自身的维稳能力也越来越差,发生森林火灾、虫害、干旱等灾害的频率逐年上升[4-5].为此,林业部门需要及时制订合理的森林资源管理政策并采取有针对性的措施[6]. ...
... 森林生物量定义为某一时刻单位面积内实存有机物质(干重)总量,估算地上生物量和蓄积量的主要目的是合理管控生态系统,并且评价一个地区的碳储量[3].蓄积量是单位面积内单木材积量的总和.二者都是特定地域的土壤、气候和地形因素之间相互作用的结果,因此在计算方式上不同地区有一定的差异[1].对于单木而言,其生物量和蓄积量往往是通过树高和胸径二者结合计算得到的[4].估算方式有两种:一种是建立异速生长方程,一种是建立回归模型. ...
... (1)异速生长方程:以单木树高和胸径作为参量的函数表达式,通常用于处理实地测量数据[1],由于生物量受树种、气候等因素的影响,不同树种、不同区域的函数表达式都不同[3].异速生长方程还被广泛用于野外实测生物量的统计计算[4]. ...
Influence of Levelling Technique on the Retrieval of Canopy Structural Parameters from Digital Hemispherical Photography
0
2017
Economics of Integrated Harvests with Biomass for Energy in Non-industrial Forests in the Northeastern US Forest
4
2019
... 森林是地球碳循环的重要组成部分,有助于维持碳平衡、保持生物多样性、减缓气候变化[1-3].目前森林对于人为干扰和气候变化等因素愈加敏感,而且其自身的维稳能力也越来越差,发生森林火灾、虫害、干旱等灾害的频率逐年上升[4-5].为此,林业部门需要及时制订合理的森林资源管理政策并采取有针对性的措施[6]. ...
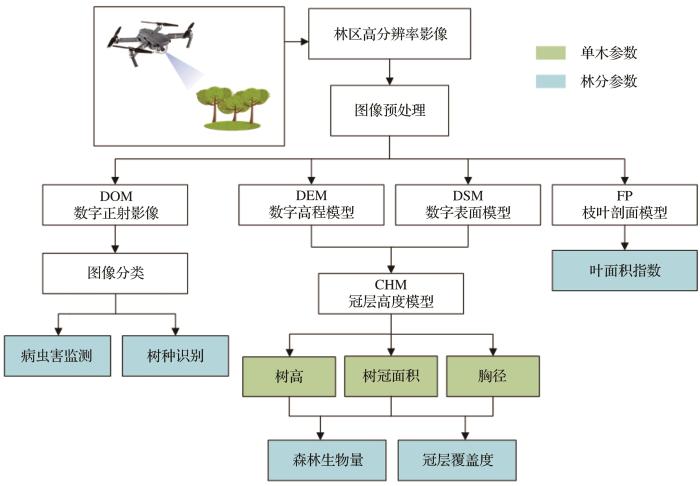
... 近年来,无人机遥感技术在森林资源监测中得到了广泛应用,其技术流程如图2所示,在无人机搭载的传感器获取目标林区高分辨率影像后[3],要对图像进行几何校正、图像拼接等预处理操作,最终得到数字正射影像(DOM)、数字高程模型(DEM)、数字表面模型(DSM)和枝叶剖面模型(FP)[5],针对DOM进行特征提取、图像分类,可以实现病虫害监测和树种识别;DSM减去DEM得到冠层高度模型(CHM)[10],从CHM中提取树高、树冠面积、胸径等单木参数,进而计算森林生物量和冠层覆盖度;利用FP在垂直高度上的分布特征可以估算林分叶面积指数. ...
... 森林生物量定义为某一时刻单位面积内实存有机物质(干重)总量,估算地上生物量和蓄积量的主要目的是合理管控生态系统,并且评价一个地区的碳储量[3].蓄积量是单位面积内单木材积量的总和.二者都是特定地域的土壤、气候和地形因素之间相互作用的结果,因此在计算方式上不同地区有一定的差异[1].对于单木而言,其生物量和蓄积量往往是通过树高和胸径二者结合计算得到的[4].估算方式有两种:一种是建立异速生长方程,一种是建立回归模型. ...
... (1)异速生长方程:以单木树高和胸径作为参量的函数表达式,通常用于处理实地测量数据[1],由于生物量受树种、气候等因素的影响,不同树种、不同区域的函数表达式都不同[3].异速生长方程还被广泛用于野外实测生物量的统计计算[4]. ...
Estimating Forest Aboveground Biomass Using Small-footprint Full-waveform Airborne LiDAR Data
4
2019
... 森林是地球碳循环的重要组成部分,有助于维持碳平衡、保持生物多样性、减缓气候变化[1-3].目前森林对于人为干扰和气候变化等因素愈加敏感,而且其自身的维稳能力也越来越差,发生森林火灾、虫害、干旱等灾害的频率逐年上升[4-5].为此,林业部门需要及时制订合理的森林资源管理政策并采取有针对性的措施[6]. ...
... 森林生物量定义为某一时刻单位面积内实存有机物质(干重)总量,估算地上生物量和蓄积量的主要目的是合理管控生态系统,并且评价一个地区的碳储量[3].蓄积量是单位面积内单木材积量的总和.二者都是特定地域的土壤、气候和地形因素之间相互作用的结果,因此在计算方式上不同地区有一定的差异[1].对于单木而言,其生物量和蓄积量往往是通过树高和胸径二者结合计算得到的[4].估算方式有两种:一种是建立异速生长方程,一种是建立回归模型. ...
... (1)异速生长方程:以单木树高和胸径作为参量的函数表达式,通常用于处理实地测量数据[1],由于生物量受树种、气候等因素的影响,不同树种、不同区域的函数表达式都不同[3].异速生长方程还被广泛用于野外实测生物量的统计计算[4]. ...
... 针对激光雷达数据通常以归一化点云、冠层垂直剖面特征变量、枝叶剖面特征变量[59]、高度特征变量和密度特征变量等作为回归模型的训练集.Luo等[4]针对机载激光雷达的全波数据,采用随机森林回归方法建立生物量反演模型,估算精度为R2=0.84,RMSE=14.60 Mg/ha.Cao等[75]利用主成分分析法,针对从激光雷达数据中提取出的有效叶面积指数、高度和胸径建立地上生物量的回归模型,预测竹林的生物量R2为0.59~0.87,RMSE为11.92%~21.11%. ...
基于纹理信息CART决策树的林芝县森林植被面向对象分类
2
2017
... 森林是地球碳循环的重要组成部分,有助于维持碳平衡、保持生物多样性、减缓气候变化[1-3].目前森林对于人为干扰和气候变化等因素愈加敏感,而且其自身的维稳能力也越来越差,发生森林火灾、虫害、干旱等灾害的频率逐年上升[4-5].为此,林业部门需要及时制订合理的森林资源管理政策并采取有针对性的措施[6]. ...
... 近年来,无人机遥感技术在森林资源监测中得到了广泛应用,其技术流程如图2所示,在无人机搭载的传感器获取目标林区高分辨率影像后[3],要对图像进行几何校正、图像拼接等预处理操作,最终得到数字正射影像(DOM)、数字高程模型(DEM)、数字表面模型(DSM)和枝叶剖面模型(FP)[5],针对DOM进行特征提取、图像分类,可以实现病虫害监测和树种识别;DSM减去DEM得到冠层高度模型(CHM)[10],从CHM中提取树高、树冠面积、胸径等单木参数,进而计算森林生物量和冠层覆盖度;利用FP在垂直高度上的分布特征可以估算林分叶面积指数. ...
基于纹理信息CART决策树的林芝县森林植被面向对象分类
2
2017
... 森林是地球碳循环的重要组成部分,有助于维持碳平衡、保持生物多样性、减缓气候变化[1-3].目前森林对于人为干扰和气候变化等因素愈加敏感,而且其自身的维稳能力也越来越差,发生森林火灾、虫害、干旱等灾害的频率逐年上升[4-5].为此,林业部门需要及时制订合理的森林资源管理政策并采取有针对性的措施[6]. ...
... 近年来,无人机遥感技术在森林资源监测中得到了广泛应用,其技术流程如图2所示,在无人机搭载的传感器获取目标林区高分辨率影像后[3],要对图像进行几何校正、图像拼接等预处理操作,最终得到数字正射影像(DOM)、数字高程模型(DEM)、数字表面模型(DSM)和枝叶剖面模型(FP)[5],针对DOM进行特征提取、图像分类,可以实现病虫害监测和树种识别;DSM减去DEM得到冠层高度模型(CHM)[10],从CHM中提取树高、树冠面积、胸径等单木参数,进而计算森林生物量和冠层覆盖度;利用FP在垂直高度上的分布特征可以估算林分叶面积指数. ...
UAV LiDAR and Hyperspectral Fusion for Forest Monitoring in the Southwestern USA
3
2017
... 森林是地球碳循环的重要组成部分,有助于维持碳平衡、保持生物多样性、减缓气候变化[1-3].目前森林对于人为干扰和气候变化等因素愈加敏感,而且其自身的维稳能力也越来越差,发生森林火灾、虫害、干旱等灾害的频率逐年上升[4-5].为此,林业部门需要及时制订合理的森林资源管理政策并采取有针对性的措施[6]. ...
... 单木是森林的基本结构单元,其三维结构、生长状况、空间分布等特性是森林资源调查、监管和生态建模所需的关键因子[28].单木参数主要包括树高、冠幅等因子,根据树冠顶点位置估计单木位置,结合异速生长方程或回归分析,可以进一步计算胸径、蓄积量、生物量以及碳储量等因子[29].无人机载的激光雷达数据和光学数据都被用来对单木参数进行估测.激光雷达通过发射激光脉冲到树木的干、枝、叶等组分上,接收后向散射信号来获取单木各组分的三维空间位置信息[30].光谱传感器通过接收树木的枝叶反射的光谱信号来获取单木的水平方向信息[6,8]. ...
... 利用光学遥感数据可以提取植被指数、纹理特征和原始的光谱反射数据作为特征变量[6].González-Jaramillo等[76]针对无人机采集的RGB图像,对比了两种生物量估测模型的精度,一种是利用数字图像摄影法生成点云数据,从中估算出树高和胸径的大小带入异速生长方程,另一种是针对机载多光谱数据提取出均一化植被指数(NDVI),再建立NDVI与生物量之间的回归方程,实验结果表明前者的生物量估测精度更高(R2=0.85). ...
Characterizing Forest Carbon Dynamics Using Multi-temporal LiDAR Data
1
2019
... 通常,森林的生长状况是通过地面观测来确定的,但是,人工实地勘测不仅耗费大量的人力物力,还会对林地生长环境造成一定的损坏[7].随着航天技术的不断发展,卫星遥感技术因其低成本和易获得等特点[8-9]受到越来越多的科研工作者的青睐.目前,大多数森林参数的获取工作是在多物种森林内的单木尺度上进行[10],因此需要遥感数据有更高的空间分辨率、光谱分辨率和时间分辨率[11-12],这是卫星遥感数据无法满足的,而无人机遥感技术恰好可以满足以上需求,并一跃成为森林资源研究的主要观测手段[15-16].无人机遥感数据不仅可以提供高分辨率的数据,还可以实现短周期重访,针对目标定点观测等. ...
Assessment of Defoliation during the Dendrolimus Tabulaeformis Tsai et Liu Disaster Outbreak Using UAV-based Hyperspectral Images
3
2018
... 通常,森林的生长状况是通过地面观测来确定的,但是,人工实地勘测不仅耗费大量的人力物力,还会对林地生长环境造成一定的损坏[7].随着航天技术的不断发展,卫星遥感技术因其低成本和易获得等特点[8-9]受到越来越多的科研工作者的青睐.目前,大多数森林参数的获取工作是在多物种森林内的单木尺度上进行[10],因此需要遥感数据有更高的空间分辨率、光谱分辨率和时间分辨率[11-12],这是卫星遥感数据无法满足的,而无人机遥感技术恰好可以满足以上需求,并一跃成为森林资源研究的主要观测手段[15-16].无人机遥感数据不仅可以提供高分辨率的数据,还可以实现短周期重访,针对目标定点观测等. ...
... 单木是森林的基本结构单元,其三维结构、生长状况、空间分布等特性是森林资源调查、监管和生态建模所需的关键因子[28].单木参数主要包括树高、冠幅等因子,根据树冠顶点位置估计单木位置,结合异速生长方程或回归分析,可以进一步计算胸径、蓄积量、生物量以及碳储量等因子[29].无人机载的激光雷达数据和光学数据都被用来对单木参数进行估测.激光雷达通过发射激光脉冲到树木的干、枝、叶等组分上,接收后向散射信号来获取单木各组分的三维空间位置信息[30].光谱传感器通过接收树木的枝叶反射的光谱信号来获取单木的水平方向信息[6,8]. ...
... (2)常见的回归模型:分为参数与非参数模型两类,其中参数模型有线性回归模型,非参数模型有支持向量机、人工神经网络、KNN近邻法和随机森林等[55].支持向量机可以克服传统预测方法数据不足和过学习等缺陷[40],在解决小样本和高维度问题中具有独特优势,但是核函数的选择会对估测结果造成影响,数据维度过高时也会降低模型的预测精度[56].人工神经网络可以有效解决数据的非线性、非高斯和噪声等问题,建模时不需要给出具体的数学函数,能够一次性引入或输出多个参量[8],但存在易过度拟合、模型泛化能力弱、物理机理不明确等问题[10].KNN算法能够保持参数间的一致性,避免样本的不平衡问题,但是它在实际计算中十分耗时[57].随机森林算法对噪声有很好的鲁棒性,训练复杂度低,而且预测迅速,但仍然存在易过拟合的问题[58]. ...
Forest Resources Assessment of 2015 Shows Positive Global Trends but Forest Loss and Degradation Persist in Poor Tropical Countries
1
2015
... 通常,森林的生长状况是通过地面观测来确定的,但是,人工实地勘测不仅耗费大量的人力物力,还会对林地生长环境造成一定的损坏[7].随着航天技术的不断发展,卫星遥感技术因其低成本和易获得等特点[8-9]受到越来越多的科研工作者的青睐.目前,大多数森林参数的获取工作是在多物种森林内的单木尺度上进行[10],因此需要遥感数据有更高的空间分辨率、光谱分辨率和时间分辨率[11-12],这是卫星遥感数据无法满足的,而无人机遥感技术恰好可以满足以上需求,并一跃成为森林资源研究的主要观测手段[15-16].无人机遥感数据不仅可以提供高分辨率的数据,还可以实现短周期重访,针对目标定点观测等. ...
Large-area Mapping of Canadian Boreal Forest Cover, Height, Biomass and Other Structural Attributes Using Landsat Composites and LiDAR Plots
3
2018
... 通常,森林的生长状况是通过地面观测来确定的,但是,人工实地勘测不仅耗费大量的人力物力,还会对林地生长环境造成一定的损坏[7].随着航天技术的不断发展,卫星遥感技术因其低成本和易获得等特点[8-9]受到越来越多的科研工作者的青睐.目前,大多数森林参数的获取工作是在多物种森林内的单木尺度上进行[10],因此需要遥感数据有更高的空间分辨率、光谱分辨率和时间分辨率[11-12],这是卫星遥感数据无法满足的,而无人机遥感技术恰好可以满足以上需求,并一跃成为森林资源研究的主要观测手段[15-16].无人机遥感数据不仅可以提供高分辨率的数据,还可以实现短周期重访,针对目标定点观测等. ...
... 近年来,无人机遥感技术在森林资源监测中得到了广泛应用,其技术流程如图2所示,在无人机搭载的传感器获取目标林区高分辨率影像后[3],要对图像进行几何校正、图像拼接等预处理操作,最终得到数字正射影像(DOM)、数字高程模型(DEM)、数字表面模型(DSM)和枝叶剖面模型(FP)[5],针对DOM进行特征提取、图像分类,可以实现病虫害监测和树种识别;DSM减去DEM得到冠层高度模型(CHM)[10],从CHM中提取树高、树冠面积、胸径等单木参数,进而计算森林生物量和冠层覆盖度;利用FP在垂直高度上的分布特征可以估算林分叶面积指数. ...
... (2)常见的回归模型:分为参数与非参数模型两类,其中参数模型有线性回归模型,非参数模型有支持向量机、人工神经网络、KNN近邻法和随机森林等[55].支持向量机可以克服传统预测方法数据不足和过学习等缺陷[40],在解决小样本和高维度问题中具有独特优势,但是核函数的选择会对估测结果造成影响,数据维度过高时也会降低模型的预测精度[56].人工神经网络可以有效解决数据的非线性、非高斯和噪声等问题,建模时不需要给出具体的数学函数,能够一次性引入或输出多个参量[8],但存在易过度拟合、模型泛化能力弱、物理机理不明确等问题[10].KNN算法能够保持参数间的一致性,避免样本的不平衡问题,但是它在实际计算中十分耗时[57].随机森林算法对噪声有很好的鲁棒性,训练复杂度低,而且预测迅速,但仍然存在易过拟合的问题[58]. ...
基于无人机激光雷达遥感的亚热带常绿阔叶林群落垂直结构分析
1
2020
... 通常,森林的生长状况是通过地面观测来确定的,但是,人工实地勘测不仅耗费大量的人力物力,还会对林地生长环境造成一定的损坏[7].随着航天技术的不断发展,卫星遥感技术因其低成本和易获得等特点[8-9]受到越来越多的科研工作者的青睐.目前,大多数森林参数的获取工作是在多物种森林内的单木尺度上进行[10],因此需要遥感数据有更高的空间分辨率、光谱分辨率和时间分辨率[11-12],这是卫星遥感数据无法满足的,而无人机遥感技术恰好可以满足以上需求,并一跃成为森林资源研究的主要观测手段[15-16].无人机遥感数据不仅可以提供高分辨率的数据,还可以实现短周期重访,针对目标定点观测等. ...
基于无人机激光雷达遥感的亚热带常绿阔叶林群落垂直结构分析
1
2020
... 通常,森林的生长状况是通过地面观测来确定的,但是,人工实地勘测不仅耗费大量的人力物力,还会对林地生长环境造成一定的损坏[7].随着航天技术的不断发展,卫星遥感技术因其低成本和易获得等特点[8-9]受到越来越多的科研工作者的青睐.目前,大多数森林参数的获取工作是在多物种森林内的单木尺度上进行[10],因此需要遥感数据有更高的空间分辨率、光谱分辨率和时间分辨率[11-12],这是卫星遥感数据无法满足的,而无人机遥感技术恰好可以满足以上需求,并一跃成为森林资源研究的主要观测手段[15-16].无人机遥感数据不仅可以提供高分辨率的数据,还可以实现短周期重访,针对目标定点观测等. ...
High Spatial Resolution Three-dimensional Mapping of Vegetation Spectral Dynamics Using Computer Vision
4
2013
... 通常,森林的生长状况是通过地面观测来确定的,但是,人工实地勘测不仅耗费大量的人力物力,还会对林地生长环境造成一定的损坏[7].随着航天技术的不断发展,卫星遥感技术因其低成本和易获得等特点[8-9]受到越来越多的科研工作者的青睐.目前,大多数森林参数的获取工作是在多物种森林内的单木尺度上进行[10],因此需要遥感数据有更高的空间分辨率、光谱分辨率和时间分辨率[11-12],这是卫星遥感数据无法满足的,而无人机遥感技术恰好可以满足以上需求,并一跃成为森林资源研究的主要观测手段[15-16].无人机遥感数据不仅可以提供高分辨率的数据,还可以实现短周期重访,针对目标定点观测等. ...
... 目前,无人机平台可以提供各种类型的低成本遥感数据[12],包括多光谱(MSP)、高光谱(HSP)、激光雷达(LiDAR)和热红外(CIR)数据,这些数据具有空间分辨率高和获取时间灵活的特点[13],被广泛用于植被测绘研究.但是,由于无人机的续航能力较低,持续飞行时间一般在小于2 h,目前只适用于小区域的森林参数数据收集[14],常作为大面积森林参数估算的验证数据. ...
... Dandois等[12]利用无人机外设数码摄像机拍摄了大量高度重叠的低空航空图片,得到的三维点云密度为30~67个/m2,点云的地理定位精度为1.2~4.1 m水平径向和0.4~12 m垂直(均方根误差RMSE),实验证明了摄影测量法得到的CHM是实地测量的树木高度的强预测因子,对于38个研究区域其相关性R2介于0.63~0.84之间.Zhang等[49]利用光学图像作为数据源,比较了基于CHM的分水岭算法和基于点云的聚类算法,前者的分割率为68.55%,分割准确率为57.46%,精度明显高于点云聚类法.在树冠分割后,可以进行树冠参数的提取,如面积大小、冠幅大小等.Laurel等[50]针对无人机高光谱数据采用面向对象的多尺度分割算法,获取了单木树冠的轮廓和位置信息. ...
... 除了激光雷达数据,无人机多光谱数据也可以用于估算冠层覆盖度.常见方法是在提取植被指数或对图像的颜色空间进行变换之后,采用像元统计法得到郁闭度估计值[12].Francesco Chianucci等[64]利用无人机得到的高分辨率RGB图像,使用了绿叶算法对图像进行变换(如公式(3)所示),将GLA≤0的像素点定义为黑色背景区,再用K-Means算法对其进行分类,得到覆盖度的估计值的皮尔逊相关系数R2=0.7. ...
Forest Variable Estimation Using a High-resolution Digital Surface Model
1
2012
... 目前,无人机平台可以提供各种类型的低成本遥感数据[12],包括多光谱(MSP)、高光谱(HSP)、激光雷达(LiDAR)和热红外(CIR)数据,这些数据具有空间分辨率高和获取时间灵活的特点[13],被广泛用于植被测绘研究.但是,由于无人机的续航能力较低,持续飞行时间一般在小于2 h,目前只适用于小区域的森林参数数据收集[14],常作为大面积森林参数估算的验证数据. ...
Predicting Forest Height Using the GOST, Landsat 7 ETM+, and Airborne LiDAR for Sloping Terrains in the Greater Khingan Mountains of China
1
2018
... 目前,无人机平台可以提供各种类型的低成本遥感数据[12],包括多光谱(MSP)、高光谱(HSP)、激光雷达(LiDAR)和热红外(CIR)数据,这些数据具有空间分辨率高和获取时间灵活的特点[13],被广泛用于植被测绘研究.但是,由于无人机的续航能力较低,持续飞行时间一般在小于2 h,目前只适用于小区域的森林参数数据收集[14],常作为大面积森林参数估算的验证数据. ...
基于无人机遥感的叶面积指数反演
2
2017
... 通常,森林的生长状况是通过地面观测来确定的,但是,人工实地勘测不仅耗费大量的人力物力,还会对林地生长环境造成一定的损坏[7].随着航天技术的不断发展,卫星遥感技术因其低成本和易获得等特点[8-9]受到越来越多的科研工作者的青睐.目前,大多数森林参数的获取工作是在多物种森林内的单木尺度上进行[10],因此需要遥感数据有更高的空间分辨率、光谱分辨率和时间分辨率[11-12],这是卫星遥感数据无法满足的,而无人机遥感技术恰好可以满足以上需求,并一跃成为森林资源研究的主要观测手段[15-16].无人机遥感数据不仅可以提供高分辨率的数据,还可以实现短周期重访,针对目标定点观测等. ...
... 国内外森林调查研究中使用的商用无人机主要可以分为固定翼无人机和旋转翼无人机两种[15].固定翼无人机需要跑道或者发射架来完成起飞和降落,而且不能在空中悬停[16].旋转翼无人机最大的优点是能够垂直起飞和降落[17],允许用户在一个较小的区域内操作,不需要实质的着陆起飞区域,其悬停能力和执行敏捷机动的能力使得旋转翼无人机更适合林业应用[18]. ...
基于无人机遥感的叶面积指数反演
2
2017
... 通常,森林的生长状况是通过地面观测来确定的,但是,人工实地勘测不仅耗费大量的人力物力,还会对林地生长环境造成一定的损坏[7].随着航天技术的不断发展,卫星遥感技术因其低成本和易获得等特点[8-9]受到越来越多的科研工作者的青睐.目前,大多数森林参数的获取工作是在多物种森林内的单木尺度上进行[10],因此需要遥感数据有更高的空间分辨率、光谱分辨率和时间分辨率[11-12],这是卫星遥感数据无法满足的,而无人机遥感技术恰好可以满足以上需求,并一跃成为森林资源研究的主要观测手段[15-16].无人机遥感数据不仅可以提供高分辨率的数据,还可以实现短周期重访,针对目标定点观测等. ...
... 国内外森林调查研究中使用的商用无人机主要可以分为固定翼无人机和旋转翼无人机两种[15].固定翼无人机需要跑道或者发射架来完成起飞和降落,而且不能在空中悬停[16].旋转翼无人机最大的优点是能够垂直起飞和降落[17],允许用户在一个较小的区域内操作,不需要实质的着陆起飞区域,其悬停能力和执行敏捷机动的能力使得旋转翼无人机更适合林业应用[18]. ...
无人机热红外城市地表温度精细特征研究
2
2019
... 通常,森林的生长状况是通过地面观测来确定的,但是,人工实地勘测不仅耗费大量的人力物力,还会对林地生长环境造成一定的损坏[7].随着航天技术的不断发展,卫星遥感技术因其低成本和易获得等特点[8-9]受到越来越多的科研工作者的青睐.目前,大多数森林参数的获取工作是在多物种森林内的单木尺度上进行[10],因此需要遥感数据有更高的空间分辨率、光谱分辨率和时间分辨率[11-12],这是卫星遥感数据无法满足的,而无人机遥感技术恰好可以满足以上需求,并一跃成为森林资源研究的主要观测手段[15-16].无人机遥感数据不仅可以提供高分辨率的数据,还可以实现短周期重访,针对目标定点观测等. ...
... 国内外森林调查研究中使用的商用无人机主要可以分为固定翼无人机和旋转翼无人机两种[15].固定翼无人机需要跑道或者发射架来完成起飞和降落,而且不能在空中悬停[16].旋转翼无人机最大的优点是能够垂直起飞和降落[17],允许用户在一个较小的区域内操作,不需要实质的着陆起飞区域,其悬停能力和执行敏捷机动的能力使得旋转翼无人机更适合林业应用[18]. ...
无人机热红外城市地表温度精细特征研究
2
2019
... 通常,森林的生长状况是通过地面观测来确定的,但是,人工实地勘测不仅耗费大量的人力物力,还会对林地生长环境造成一定的损坏[7].随着航天技术的不断发展,卫星遥感技术因其低成本和易获得等特点[8-9]受到越来越多的科研工作者的青睐.目前,大多数森林参数的获取工作是在多物种森林内的单木尺度上进行[10],因此需要遥感数据有更高的空间分辨率、光谱分辨率和时间分辨率[11-12],这是卫星遥感数据无法满足的,而无人机遥感技术恰好可以满足以上需求,并一跃成为森林资源研究的主要观测手段[15-16].无人机遥感数据不仅可以提供高分辨率的数据,还可以实现短周期重访,针对目标定点观测等. ...
... 国内外森林调查研究中使用的商用无人机主要可以分为固定翼无人机和旋转翼无人机两种[15].固定翼无人机需要跑道或者发射架来完成起飞和降落,而且不能在空中悬停[16].旋转翼无人机最大的优点是能够垂直起飞和降落[17],允许用户在一个较小的区域内操作,不需要实质的着陆起飞区域,其悬停能力和执行敏捷机动的能力使得旋转翼无人机更适合林业应用[18]. ...
基于无人机遥感的亚热带森林林分株数提取
2
2018
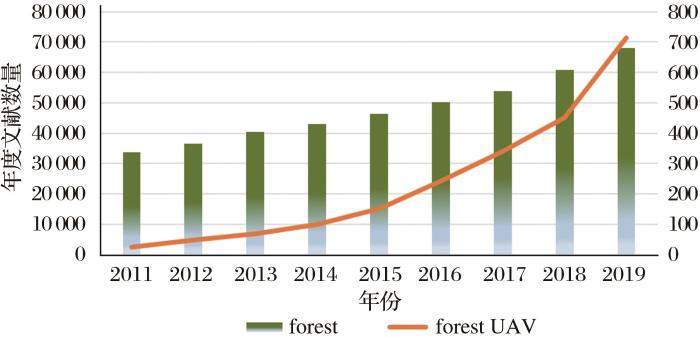
... 无人机(UAV)遥感平台[17]是21世纪新兴的遥感成像平台,其整合了先进的无人机飞行技术、遥感传感器技术、通信技术、定位定姿技术(POS)和差分定位技术(GPS),是快速获取空间信息并进行精确建模分析的航空遥感技术手段.不同于其他航天遥感技术,无人机遥感平台获取的数据空间分辨率更高,更适合小区域的精确测量,其航行路线、观测时间和重访周期可以人为控制,而且其观测成本更低,低空飞行不受云量影像,成像质量更高.目前其技术虽不及其他航空遥感平台成熟,但其发展势头迅猛,凭借其可控性强、性价比高的特点广受好评.如图1所示,本文统计了自2010年以来Scopus和Elsevier Science Direct两个检索平台上“forest”和“forest UAV”相关论文的发表情况,可以发现无人机遥感平台在森林资源监测方面的应用逐年增加,该研究方向也受到了相关领域学者的高度关注,2018年至2019年学术论文发表数量的增长率达到了58.1%. ...
... 国内外森林调查研究中使用的商用无人机主要可以分为固定翼无人机和旋转翼无人机两种[15].固定翼无人机需要跑道或者发射架来完成起飞和降落,而且不能在空中悬停[16].旋转翼无人机最大的优点是能够垂直起飞和降落[17],允许用户在一个较小的区域内操作,不需要实质的着陆起飞区域,其悬停能力和执行敏捷机动的能力使得旋转翼无人机更适合林业应用[18]. ...
基于无人机遥感的亚热带森林林分株数提取
2
2018
... 无人机(UAV)遥感平台[17]是21世纪新兴的遥感成像平台,其整合了先进的无人机飞行技术、遥感传感器技术、通信技术、定位定姿技术(POS)和差分定位技术(GPS),是快速获取空间信息并进行精确建模分析的航空遥感技术手段.不同于其他航天遥感技术,无人机遥感平台获取的数据空间分辨率更高,更适合小区域的精确测量,其航行路线、观测时间和重访周期可以人为控制,而且其观测成本更低,低空飞行不受云量影像,成像质量更高.目前其技术虽不及其他航空遥感平台成熟,但其发展势头迅猛,凭借其可控性强、性价比高的特点广受好评.如图1所示,本文统计了自2010年以来Scopus和Elsevier Science Direct两个检索平台上“forest”和“forest UAV”相关论文的发表情况,可以发现无人机遥感平台在森林资源监测方面的应用逐年增加,该研究方向也受到了相关领域学者的高度关注,2018年至2019年学术论文发表数量的增长率达到了58.1%. ...
... 国内外森林调查研究中使用的商用无人机主要可以分为固定翼无人机和旋转翼无人机两种[15].固定翼无人机需要跑道或者发射架来完成起飞和降落,而且不能在空中悬停[16].旋转翼无人机最大的优点是能够垂直起飞和降落[17],允许用户在一个较小的区域内操作,不需要实质的着陆起飞区域,其悬停能力和执行敏捷机动的能力使得旋转翼无人机更适合林业应用[18]. ...
基于无人机影像的山地人工林景观 DEM 构建
1
2015
... 国内外森林调查研究中使用的商用无人机主要可以分为固定翼无人机和旋转翼无人机两种[15].固定翼无人机需要跑道或者发射架来完成起飞和降落,而且不能在空中悬停[16].旋转翼无人机最大的优点是能够垂直起飞和降落[17],允许用户在一个较小的区域内操作,不需要实质的着陆起飞区域,其悬停能力和执行敏捷机动的能力使得旋转翼无人机更适合林业应用[18]. ...
基于无人机影像的山地人工林景观 DEM 构建
1
2015
... 国内外森林调查研究中使用的商用无人机主要可以分为固定翼无人机和旋转翼无人机两种[15].固定翼无人机需要跑道或者发射架来完成起飞和降落,而且不能在空中悬停[16].旋转翼无人机最大的优点是能够垂直起飞和降落[17],允许用户在一个较小的区域内操作,不需要实质的着陆起飞区域,其悬停能力和执行敏捷机动的能力使得旋转翼无人机更适合林业应用[18]. ...
UAV LiDAR and Hyperspectral Fusion for Forest Monitoring in the Southwestern USA
2
2017
... (1)激光雷达.是一种主动遥感技术,它通过发射激光能量和接收返回信号的方式[19],来获取高精度的森林空间结构和林下地形信息[20].传统的LiDAR是搭载在飞机上,不论观测区域的大小,单次飞行成本高达10余万元[21].随着无人机技术的迅速发展,如今的LiDAR大多搭载在无人机上,这使得观测成本大大降低,每公顷约为0.35~1.50元[22].目前,市场上出现了一系列体积小巧的商用机载激光雷达系统,例如Riegl、Optec、Letica等公司推出的激光雷达系统[19-20],在森林调查、生态环境监测等方面得到了很好的应用[21-22]. ...
... [19-20],在森林调查、生态环境监测等方面得到了很好的应用[21-22]. ...
机载激光剋大探测技术与应用研究进展
2
2016
... (1)激光雷达.是一种主动遥感技术,它通过发射激光能量和接收返回信号的方式[19],来获取高精度的森林空间结构和林下地形信息[20].传统的LiDAR是搭载在飞机上,不论观测区域的大小,单次飞行成本高达10余万元[21].随着无人机技术的迅速发展,如今的LiDAR大多搭载在无人机上,这使得观测成本大大降低,每公顷约为0.35~1.50元[22].目前,市场上出现了一系列体积小巧的商用机载激光雷达系统,例如Riegl、Optec、Letica等公司推出的激光雷达系统[19-20],在森林调查、生态环境监测等方面得到了很好的应用[21-22]. ...
... -20],在森林调查、生态环境监测等方面得到了很好的应用[21-22]. ...
机载激光剋大探测技术与应用研究进展
2
2016
... (1)激光雷达.是一种主动遥感技术,它通过发射激光能量和接收返回信号的方式[19],来获取高精度的森林空间结构和林下地形信息[20].传统的LiDAR是搭载在飞机上,不论观测区域的大小,单次飞行成本高达10余万元[21].随着无人机技术的迅速发展,如今的LiDAR大多搭载在无人机上,这使得观测成本大大降低,每公顷约为0.35~1.50元[22].目前,市场上出现了一系列体积小巧的商用机载激光雷达系统,例如Riegl、Optec、Letica等公司推出的激光雷达系统[19-20],在森林调查、生态环境监测等方面得到了很好的应用[21-22]. ...
... -20],在森林调查、生态环境监测等方面得到了很好的应用[21-22]. ...
Retrieving Forest Canopy Extinction Coefficient from Terrestrial and Airborne LiDAR
2
2017
... (1)激光雷达.是一种主动遥感技术,它通过发射激光能量和接收返回信号的方式[19],来获取高精度的森林空间结构和林下地形信息[20].传统的LiDAR是搭载在飞机上,不论观测区域的大小,单次飞行成本高达10余万元[21].随着无人机技术的迅速发展,如今的LiDAR大多搭载在无人机上,这使得观测成本大大降低,每公顷约为0.35~1.50元[22].目前,市场上出现了一系列体积小巧的商用机载激光雷达系统,例如Riegl、Optec、Letica等公司推出的激光雷达系统[19-20],在森林调查、生态环境监测等方面得到了很好的应用[21-22]. ...
... [21-22]. ...
结合LiDAR单木分割和高光谱特征提取的城市森林树种分类
2
2018
... (1)激光雷达.是一种主动遥感技术,它通过发射激光能量和接收返回信号的方式[19],来获取高精度的森林空间结构和林下地形信息[20].传统的LiDAR是搭载在飞机上,不论观测区域的大小,单次飞行成本高达10余万元[21].随着无人机技术的迅速发展,如今的LiDAR大多搭载在无人机上,这使得观测成本大大降低,每公顷约为0.35~1.50元[22].目前,市场上出现了一系列体积小巧的商用机载激光雷达系统,例如Riegl、Optec、Letica等公司推出的激光雷达系统[19-20],在森林调查、生态环境监测等方面得到了很好的应用[21-22]. ...
... -22]. ...
结合LiDAR单木分割和高光谱特征提取的城市森林树种分类
2
2018
... (1)激光雷达.是一种主动遥感技术,它通过发射激光能量和接收返回信号的方式[19],来获取高精度的森林空间结构和林下地形信息[20].传统的LiDAR是搭载在飞机上,不论观测区域的大小,单次飞行成本高达10余万元[21].随着无人机技术的迅速发展,如今的LiDAR大多搭载在无人机上,这使得观测成本大大降低,每公顷约为0.35~1.50元[22].目前,市场上出现了一系列体积小巧的商用机载激光雷达系统,例如Riegl、Optec、Letica等公司推出的激光雷达系统[19-20],在森林调查、生态环境监测等方面得到了很好的应用[21-22]. ...
... -22]. ...
3D Forest: An Application for Descriptions of Three-dimensional Forest Structures Using Terrestrial LiDAR
0
2017
Tree Species Classification using Hyperspectral Imagery: A Comparison of Two Classifiers
2
2016
... (3)高光谱传感器.具有更丰富的光谱信息,通常具有几百个波段[24],其光谱分辨率在400~1 000 nm之间,因此相对于多光谱传感器,它对细微的地物变化更加敏感[25].高光谱数据常被用来进行林木种类识别、目标物种检测和病虫害监测等[26],它可以在较宽的飞行高度范围(100~2 000 m)内工作,飞行高度决定了获得的遥感图像范围和空间分辨率大小[24-25].然而,随着光谱分辨率和空间分辨率的提高,数据的高维性、不良噪声和高光谱冗余度现象也随之增加,这给高光谱图像的存储、处理和分析带来了挑战[27],因此,使用高光谱数据时,数据降维和有效波段提取是必要的操作过程. ...
... [24-25].然而,随着光谱分辨率和空间分辨率的提高,数据的高维性、不良噪声和高光谱冗余度现象也随之增加,这给高光谱图像的存储、处理和分析带来了挑战[27],因此,使用高光谱数据时,数据降维和有效波段提取是必要的操作过程. ...
Hyperspectral Imaging: A Review on UAV-based Sensors, Data Processing and Applications for Agriculture and Forestry
3
2017
... (2)多光谱传感器.可以同时接收数个或十几个波段的信息,主要包括RGB和对植被敏感的近红外、红边等波段[25],是最常用的遥感传感器. ...
... (3)高光谱传感器.具有更丰富的光谱信息,通常具有几百个波段[24],其光谱分辨率在400~1 000 nm之间,因此相对于多光谱传感器,它对细微的地物变化更加敏感[25].高光谱数据常被用来进行林木种类识别、目标物种检测和病虫害监测等[26],它可以在较宽的飞行高度范围(100~2 000 m)内工作,飞行高度决定了获得的遥感图像范围和空间分辨率大小[24-25].然而,随着光谱分辨率和空间分辨率的提高,数据的高维性、不良噪声和高光谱冗余度现象也随之增加,这给高光谱图像的存储、处理和分析带来了挑战[27],因此,使用高光谱数据时,数据降维和有效波段提取是必要的操作过程. ...
... -25].然而,随着光谱分辨率和空间分辨率的提高,数据的高维性、不良噪声和高光谱冗余度现象也随之增加,这给高光谱图像的存储、处理和分析带来了挑战[27],因此,使用高光谱数据时,数据降维和有效波段提取是必要的操作过程. ...
UAV LiDAR and Hyperspectral Fusion for Forest Monitoring in the Southwestern USA
1
2017
... (3)高光谱传感器.具有更丰富的光谱信息,通常具有几百个波段[24],其光谱分辨率在400~1 000 nm之间,因此相对于多光谱传感器,它对细微的地物变化更加敏感[25].高光谱数据常被用来进行林木种类识别、目标物种检测和病虫害监测等[26],它可以在较宽的飞行高度范围(100~2 000 m)内工作,飞行高度决定了获得的遥感图像范围和空间分辨率大小[24-25].然而,随着光谱分辨率和空间分辨率的提高,数据的高维性、不良噪声和高光谱冗余度现象也随之增加,这给高光谱图像的存储、处理和分析带来了挑战[27],因此,使用高光谱数据时,数据降维和有效波段提取是必要的操作过程. ...
Mapping the Leaf Economic Spectrum Across West African Tropical Forests Using UAV-Acquired Hyperspectral Imagery
2
2018
... (3)高光谱传感器.具有更丰富的光谱信息,通常具有几百个波段[24],其光谱分辨率在400~1 000 nm之间,因此相对于多光谱传感器,它对细微的地物变化更加敏感[25].高光谱数据常被用来进行林木种类识别、目标物种检测和病虫害监测等[26],它可以在较宽的飞行高度范围(100~2 000 m)内工作,飞行高度决定了获得的遥感图像范围和空间分辨率大小[24-25].然而,随着光谱分辨率和空间分辨率的提高,数据的高维性、不良噪声和高光谱冗余度现象也随之增加,这给高光谱图像的存储、处理和分析带来了挑战[27],因此,使用高光谱数据时,数据降维和有效波段提取是必要的操作过程. ...
... (1)冠层高度模型是最常见的遥感三维植被测量方法,CHM可以通过遥感图像的多立体摄影测量法或主动合成孔径雷达传感器的点云数据来建立[35].根据激光脉冲从植被冠层表面和地面反射回雷达的时间不同,激光雷达可以由此获得地物的垂直结构信息[27],从而生成下层地形高度模型(数字地形模型DTM)和顶部冠层表面高度模型(数字地表模型DSM),DSM与DTM的差值即为CHM[36-37]. ...
Individual Tree Detection and Classification with UAV-based Photogrammetric Point Clouds and Hyperspectral Imaging
4
2017
... 单木是森林的基本结构单元,其三维结构、生长状况、空间分布等特性是森林资源调查、监管和生态建模所需的关键因子[28].单木参数主要包括树高、冠幅等因子,根据树冠顶点位置估计单木位置,结合异速生长方程或回归分析,可以进一步计算胸径、蓄积量、生物量以及碳储量等因子[29].无人机载的激光雷达数据和光学数据都被用来对单木参数进行估测.激光雷达通过发射激光脉冲到树木的干、枝、叶等组分上,接收后向散射信号来获取单木各组分的三维空间位置信息[30].光谱传感器通过接收树木的枝叶反射的光谱信号来获取单木的水平方向信息[6,8]. ...
... (3)冠层高度分布剖面描述了包含枝叶及非光合作用组织在垂直高度上的点云密度分布情况,用一定高度间隔内的点云数占点云总数的比值表示[44-46].冠层剖面的高度最大值即为树冠高度,该像元即为树顶像元.在确定树顶像元位置和搜索窗口之后,进行冠层边缘提取操作[44].首先以树顶像元为中心提取当前搜索窗口内相互正交的两个方向上的剖面数据[47],剖面横轴为水平距离,纵轴为高度值,然后对剖面内所有像元高度值构成的序列进行多项式拟合[28,30],树顶像元两边最近的两个拐点之间的水平距离被认为是该方向上的冠幅,取两个正交剖面提取的冠幅的平均值为最终的冠幅[48]. ...
... 光学数据提取单木冠层参数主要有两种方式,一种是利用图像分割算法、局部最大值法等在光学图像上直接提取[44],另一种是通过数字光学图像的多立体摄影测量方法提取点云数据,生成CHM栅格数据,在栅格数据上提取参数[45].单木树冠分割包括单木位置监测和树冠边界分割,从CHM栅格数据和原始光谱数据出发[28],利用图像分割算法来实现单木分割,常用算法有分水岭算法[30],多尺度分割算法[32]、多项式拟合算法[50]、特征点决策树法[49]等,以上算法中多尺度分割和分水岭算法的分割效果更为突出[30,32]. ...
... 在高分辨率的光学图像中一般通过统计学方法确定单木的冠幅大小.在确定了树顶像元的位置之后,可以根据图像分辨率和实测冠幅大小确定搜索窗口的大小[28,30],进行冠幅提取.在窗口内检测树冠轮廓到树顶像元的最大距离和最小距离,二者的算术平均值确定为冠幅值[32]. ...
Single-tree Detection in High-density LiDAR Data from UAV-based Survey
1
2018
... 单木是森林的基本结构单元,其三维结构、生长状况、空间分布等特性是森林资源调查、监管和生态建模所需的关键因子[28].单木参数主要包括树高、冠幅等因子,根据树冠顶点位置估计单木位置,结合异速生长方程或回归分析,可以进一步计算胸径、蓄积量、生物量以及碳储量等因子[29].无人机载的激光雷达数据和光学数据都被用来对单木参数进行估测.激光雷达通过发射激光脉冲到树木的干、枝、叶等组分上,接收后向散射信号来获取单木各组分的三维空间位置信息[30].光谱传感器通过接收树木的枝叶反射的光谱信号来获取单木的水平方向信息[6,8]. ...
Individual Tree Detection in a Eucalyptus Plantation Using Unmanned Aerial Vehicle (UAV)-LiDAR
5
2020
... 单木是森林的基本结构单元,其三维结构、生长状况、空间分布等特性是森林资源调查、监管和生态建模所需的关键因子[28].单木参数主要包括树高、冠幅等因子,根据树冠顶点位置估计单木位置,结合异速生长方程或回归分析,可以进一步计算胸径、蓄积量、生物量以及碳储量等因子[29].无人机载的激光雷达数据和光学数据都被用来对单木参数进行估测.激光雷达通过发射激光脉冲到树木的干、枝、叶等组分上,接收后向散射信号来获取单木各组分的三维空间位置信息[30].光谱传感器通过接收树木的枝叶反射的光谱信号来获取单木的水平方向信息[6,8]. ...
... (3)冠层高度分布剖面描述了包含枝叶及非光合作用组织在垂直高度上的点云密度分布情况,用一定高度间隔内的点云数占点云总数的比值表示[44-46].冠层剖面的高度最大值即为树冠高度,该像元即为树顶像元.在确定树顶像元位置和搜索窗口之后,进行冠层边缘提取操作[44].首先以树顶像元为中心提取当前搜索窗口内相互正交的两个方向上的剖面数据[47],剖面横轴为水平距离,纵轴为高度值,然后对剖面内所有像元高度值构成的序列进行多项式拟合[28,30],树顶像元两边最近的两个拐点之间的水平距离被认为是该方向上的冠幅,取两个正交剖面提取的冠幅的平均值为最终的冠幅[48]. ...
... 光学数据提取单木冠层参数主要有两种方式,一种是利用图像分割算法、局部最大值法等在光学图像上直接提取[44],另一种是通过数字光学图像的多立体摄影测量方法提取点云数据,生成CHM栅格数据,在栅格数据上提取参数[45].单木树冠分割包括单木位置监测和树冠边界分割,从CHM栅格数据和原始光谱数据出发[28],利用图像分割算法来实现单木分割,常用算法有分水岭算法[30],多尺度分割算法[32]、多项式拟合算法[50]、特征点决策树法[49]等,以上算法中多尺度分割和分水岭算法的分割效果更为突出[30,32]. ...
... [30,32]. ...
... 在高分辨率的光学图像中一般通过统计学方法确定单木的冠幅大小.在确定了树顶像元的位置之后,可以根据图像分辨率和实测冠幅大小确定搜索窗口的大小[28,30],进行冠幅提取.在窗口内检测树冠轮廓到树顶像元的最大距离和最小距离,二者的算术平均值确定为冠幅值[32]. ...
Comparison of UAV Photograph-based and Airborne LiDAR-based Point Clouds over Forest from a Forestry Application Perspective
1
2017
... 激光雷达对森林垂直信息尤为敏感,将其搭载在无人机上可以获得高密度地形点云数据.激光雷达数据提取单木结构因子的方法可以分为三类,第一类是通过栅格化冠层高度模型中识别单木特征,称为CHM单木法[31];第二类是由离散的地形归一化点云(NPC)数据提取单木特征[32-33];第三类是由点云数据建立冠层高度分布模型(CHD)[34]. ...
A New Method for 3D Individual Tree Extraction using Multispectral Airborne LiDAR Point Clouds
4
2018
... 激光雷达对森林垂直信息尤为敏感,将其搭载在无人机上可以获得高密度地形点云数据.激光雷达数据提取单木结构因子的方法可以分为三类,第一类是通过栅格化冠层高度模型中识别单木特征,称为CHM单木法[31];第二类是由离散的地形归一化点云(NPC)数据提取单木特征[32-33];第三类是由点云数据建立冠层高度分布模型(CHD)[34]. ...
... 光学数据提取单木冠层参数主要有两种方式,一种是利用图像分割算法、局部最大值法等在光学图像上直接提取[44],另一种是通过数字光学图像的多立体摄影测量方法提取点云数据,生成CHM栅格数据,在栅格数据上提取参数[45].单木树冠分割包括单木位置监测和树冠边界分割,从CHM栅格数据和原始光谱数据出发[28],利用图像分割算法来实现单木分割,常用算法有分水岭算法[30],多尺度分割算法[32]、多项式拟合算法[50]、特征点决策树法[49]等,以上算法中多尺度分割和分水岭算法的分割效果更为突出[30,32]. ...
... ,32]. ...
... 在高分辨率的光学图像中一般通过统计学方法确定单木的冠幅大小.在确定了树顶像元的位置之后,可以根据图像分辨率和实测冠幅大小确定搜索窗口的大小[28,30],进行冠幅提取.在窗口内检测树冠轮廓到树顶像元的最大距离和最小距离,二者的算术平均值确定为冠幅值[32]. ...
Integration of Tree Allometry Rules to Treetops Detection and Tree Crowns Delineation Using Airborne LiDAR Data
1
2017
... 激光雷达对森林垂直信息尤为敏感,将其搭载在无人机上可以获得高密度地形点云数据.激光雷达数据提取单木结构因子的方法可以分为三类,第一类是通过栅格化冠层高度模型中识别单木特征,称为CHM单木法[31];第二类是由离散的地形归一化点云(NPC)数据提取单木特征[32-33];第三类是由点云数据建立冠层高度分布模型(CHD)[34]. ...
A Robust Approach for Tree Segmentation in Deciduous Forests Using Small-footprint Airborne LiDAR Data
1
2016
... 激光雷达对森林垂直信息尤为敏感,将其搭载在无人机上可以获得高密度地形点云数据.激光雷达数据提取单木结构因子的方法可以分为三类,第一类是通过栅格化冠层高度模型中识别单木特征,称为CHM单木法[31];第二类是由离散的地形归一化点云(NPC)数据提取单木特征[32-33];第三类是由点云数据建立冠层高度分布模型(CHD)[34]. ...
3D Micro-mapping: Towards Assessing the Quality of Crowdsourcing to Support 3D Point Cloud Analysis
1
2018
... (1)冠层高度模型是最常见的遥感三维植被测量方法,CHM可以通过遥感图像的多立体摄影测量法或主动合成孔径雷达传感器的点云数据来建立[35].根据激光脉冲从植被冠层表面和地面反射回雷达的时间不同,激光雷达可以由此获得地物的垂直结构信息[27],从而生成下层地形高度模型(数字地形模型DTM)和顶部冠层表面高度模型(数字地表模型DSM),DSM与DTM的差值即为CHM[36-37]. ...
Canopy Height Model (CHM) Derived from a TanDEM-X InSAR DSM and an Airborne LiDAR DTM in Boreal Forest
1
2016
... (1)冠层高度模型是最常见的遥感三维植被测量方法,CHM可以通过遥感图像的多立体摄影测量法或主动合成孔径雷达传感器的点云数据来建立[35].根据激光脉冲从植被冠层表面和地面反射回雷达的时间不同,激光雷达可以由此获得地物的垂直结构信息[27],从而生成下层地形高度模型(数字地形模型DTM)和顶部冠层表面高度模型(数字地表模型DSM),DSM与DTM的差值即为CHM[36-37]. ...
Object-based Forest Gaps Classification Using Airborne LiDAR Data
1
2019
... (1)冠层高度模型是最常见的遥感三维植被测量方法,CHM可以通过遥感图像的多立体摄影测量法或主动合成孔径雷达传感器的点云数据来建立[35].根据激光脉冲从植被冠层表面和地面反射回雷达的时间不同,激光雷达可以由此获得地物的垂直结构信息[27],从而生成下层地形高度模型(数字地形模型DTM)和顶部冠层表面高度模型(数字地表模型DSM),DSM与DTM的差值即为CHM[36-37]. ...
Predicting Temperate Forest Stand Types Using only Structural Profiles from Discrete Return Airborne LiDAR
1
2018
... (2)NPC单木法是直接对原始或归一化点云数据进行分割,包括K均值聚类算法、贝叶斯算法、局部最大值聚类算法等[38].K均值聚类算法根据点云坐标之间的欧氏距离将特征空间划分为多个相近值区域[39],使得特征空间点之间距离之和最小.贝叶斯算法通过估计树高、冠长、冠幅等参数,来提高密林的单木探测结果[40-41].局部最大值聚类算法采用自顶向下方法对点进行分类,将全局最大值点作为最高木的树冠顶点,根据树冠特征将特征点分为目标点和其他点,在其他点中迭代循环,直到所有点分为对应的集合[42].Silva等[43]利用高分辨率机载激光雷达影像,生成冠层高度模型,再用局部最大值法来进行单木识别,并且探究了不同的窗口大小和步长大小对识别精度的影响,最终在367棵参考树中,检测到了312棵树,准确率为85%. ...
Estimating Forest Canopy Fuel Parameters Using LiDAR Data
1
2005
... (2)NPC单木法是直接对原始或归一化点云数据进行分割,包括K均值聚类算法、贝叶斯算法、局部最大值聚类算法等[38].K均值聚类算法根据点云坐标之间的欧氏距离将特征空间划分为多个相近值区域[39],使得特征空间点之间距离之和最小.贝叶斯算法通过估计树高、冠长、冠幅等参数,来提高密林的单木探测结果[40-41].局部最大值聚类算法采用自顶向下方法对点进行分类,将全局最大值点作为最高木的树冠顶点,根据树冠特征将特征点分为目标点和其他点,在其他点中迭代循环,直到所有点分为对应的集合[42].Silva等[43]利用高分辨率机载激光雷达影像,生成冠层高度模型,再用局部最大值法来进行单木识别,并且探究了不同的窗口大小和步长大小对识别精度的影响,最终在367棵参考树中,检测到了312棵树,准确率为85%. ...
Spacetime Stereo: A Unifying Framework for Depth from Triangulation
2
2003
... (2)NPC单木法是直接对原始或归一化点云数据进行分割,包括K均值聚类算法、贝叶斯算法、局部最大值聚类算法等[38].K均值聚类算法根据点云坐标之间的欧氏距离将特征空间划分为多个相近值区域[39],使得特征空间点之间距离之和最小.贝叶斯算法通过估计树高、冠长、冠幅等参数,来提高密林的单木探测结果[40-41].局部最大值聚类算法采用自顶向下方法对点进行分类,将全局最大值点作为最高木的树冠顶点,根据树冠特征将特征点分为目标点和其他点,在其他点中迭代循环,直到所有点分为对应的集合[42].Silva等[43]利用高分辨率机载激光雷达影像,生成冠层高度模型,再用局部最大值法来进行单木识别,并且探究了不同的窗口大小和步长大小对识别精度的影响,最终在367棵参考树中,检测到了312棵树,准确率为85%. ...
... (2)常见的回归模型:分为参数与非参数模型两类,其中参数模型有线性回归模型,非参数模型有支持向量机、人工神经网络、KNN近邻法和随机森林等[55].支持向量机可以克服传统预测方法数据不足和过学习等缺陷[40],在解决小样本和高维度问题中具有独特优势,但是核函数的选择会对估测结果造成影响,数据维度过高时也会降低模型的预测精度[56].人工神经网络可以有效解决数据的非线性、非高斯和噪声等问题,建模时不需要给出具体的数学函数,能够一次性引入或输出多个参量[8],但存在易过度拟合、模型泛化能力弱、物理机理不明确等问题[10].KNN算法能够保持参数间的一致性,避免样本的不平衡问题,但是它在实际计算中十分耗时[57].随机森林算法对噪声有很好的鲁棒性,训练复杂度低,而且预测迅速,但仍然存在易过拟合的问题[58]. ...
Bayesian Multi-resolution Modeling for Spatially Replicated Data Sets with Application to Forest Biomass Data
1
2007
... (2)NPC单木法是直接对原始或归一化点云数据进行分割,包括K均值聚类算法、贝叶斯算法、局部最大值聚类算法等[38].K均值聚类算法根据点云坐标之间的欧氏距离将特征空间划分为多个相近值区域[39],使得特征空间点之间距离之和最小.贝叶斯算法通过估计树高、冠长、冠幅等参数,来提高密林的单木探测结果[40-41].局部最大值聚类算法采用自顶向下方法对点进行分类,将全局最大值点作为最高木的树冠顶点,根据树冠特征将特征点分为目标点和其他点,在其他点中迭代循环,直到所有点分为对应的集合[42].Silva等[43]利用高分辨率机载激光雷达影像,生成冠层高度模型,再用局部最大值法来进行单木识别,并且探究了不同的窗口大小和步长大小对识别精度的影响,最终在367棵参考树中,检测到了312棵树,准确率为85%. ...
无人机遥感影像林地单株立木信息提取
1
2018
... (2)NPC单木法是直接对原始或归一化点云数据进行分割,包括K均值聚类算法、贝叶斯算法、局部最大值聚类算法等[38].K均值聚类算法根据点云坐标之间的欧氏距离将特征空间划分为多个相近值区域[39],使得特征空间点之间距离之和最小.贝叶斯算法通过估计树高、冠长、冠幅等参数,来提高密林的单木探测结果[40-41].局部最大值聚类算法采用自顶向下方法对点进行分类,将全局最大值点作为最高木的树冠顶点,根据树冠特征将特征点分为目标点和其他点,在其他点中迭代循环,直到所有点分为对应的集合[42].Silva等[43]利用高分辨率机载激光雷达影像,生成冠层高度模型,再用局部最大值法来进行单木识别,并且探究了不同的窗口大小和步长大小对识别精度的影响,最终在367棵参考树中,检测到了312棵树,准确率为85%. ...
无人机遥感影像林地单株立木信息提取
1
2018
... (2)NPC单木法是直接对原始或归一化点云数据进行分割,包括K均值聚类算法、贝叶斯算法、局部最大值聚类算法等[38].K均值聚类算法根据点云坐标之间的欧氏距离将特征空间划分为多个相近值区域[39],使得特征空间点之间距离之和最小.贝叶斯算法通过估计树高、冠长、冠幅等参数,来提高密林的单木探测结果[40-41].局部最大值聚类算法采用自顶向下方法对点进行分类,将全局最大值点作为最高木的树冠顶点,根据树冠特征将特征点分为目标点和其他点,在其他点中迭代循环,直到所有点分为对应的集合[42].Silva等[43]利用高分辨率机载激光雷达影像,生成冠层高度模型,再用局部最大值法来进行单木识别,并且探究了不同的窗口大小和步长大小对识别精度的影响,最终在367棵参考树中,检测到了312棵树,准确率为85%. ...
Predicting Stem Total and Assortment Volumes in an Industrial Pinus Taeda L. Forest Plantation Using Airborne Laser Scanning Data and Random Forest
1
2017
... (2)NPC单木法是直接对原始或归一化点云数据进行分割,包括K均值聚类算法、贝叶斯算法、局部最大值聚类算法等[38].K均值聚类算法根据点云坐标之间的欧氏距离将特征空间划分为多个相近值区域[39],使得特征空间点之间距离之和最小.贝叶斯算法通过估计树高、冠长、冠幅等参数,来提高密林的单木探测结果[40-41].局部最大值聚类算法采用自顶向下方法对点进行分类,将全局最大值点作为最高木的树冠顶点,根据树冠特征将特征点分为目标点和其他点,在其他点中迭代循环,直到所有点分为对应的集合[42].Silva等[43]利用高分辨率机载激光雷达影像,生成冠层高度模型,再用局部最大值法来进行单木识别,并且探究了不同的窗口大小和步长大小对识别精度的影响,最终在367棵参考树中,检测到了312棵树,准确率为85%. ...
基于体元投影的一种非规则数据场体绘制方法
3
2008
... (3)冠层高度分布剖面描述了包含枝叶及非光合作用组织在垂直高度上的点云密度分布情况,用一定高度间隔内的点云数占点云总数的比值表示[44-46].冠层剖面的高度最大值即为树冠高度,该像元即为树顶像元.在确定树顶像元位置和搜索窗口之后,进行冠层边缘提取操作[44].首先以树顶像元为中心提取当前搜索窗口内相互正交的两个方向上的剖面数据[47],剖面横轴为水平距离,纵轴为高度值,然后对剖面内所有像元高度值构成的序列进行多项式拟合[28,30],树顶像元两边最近的两个拐点之间的水平距离被认为是该方向上的冠幅,取两个正交剖面提取的冠幅的平均值为最终的冠幅[48]. ...
... [44].首先以树顶像元为中心提取当前搜索窗口内相互正交的两个方向上的剖面数据[47],剖面横轴为水平距离,纵轴为高度值,然后对剖面内所有像元高度值构成的序列进行多项式拟合[28,30],树顶像元两边最近的两个拐点之间的水平距离被认为是该方向上的冠幅,取两个正交剖面提取的冠幅的平均值为最终的冠幅[48]. ...
... 光学数据提取单木冠层参数主要有两种方式,一种是利用图像分割算法、局部最大值法等在光学图像上直接提取[44],另一种是通过数字光学图像的多立体摄影测量方法提取点云数据,生成CHM栅格数据,在栅格数据上提取参数[45].单木树冠分割包括单木位置监测和树冠边界分割,从CHM栅格数据和原始光谱数据出发[28],利用图像分割算法来实现单木分割,常用算法有分水岭算法[30],多尺度分割算法[32]、多项式拟合算法[50]、特征点决策树法[49]等,以上算法中多尺度分割和分水岭算法的分割效果更为突出[30,32]. ...
基于体元投影的一种非规则数据场体绘制方法
3
2008
... (3)冠层高度分布剖面描述了包含枝叶及非光合作用组织在垂直高度上的点云密度分布情况,用一定高度间隔内的点云数占点云总数的比值表示[44-46].冠层剖面的高度最大值即为树冠高度,该像元即为树顶像元.在确定树顶像元位置和搜索窗口之后,进行冠层边缘提取操作[44].首先以树顶像元为中心提取当前搜索窗口内相互正交的两个方向上的剖面数据[47],剖面横轴为水平距离,纵轴为高度值,然后对剖面内所有像元高度值构成的序列进行多项式拟合[28,30],树顶像元两边最近的两个拐点之间的水平距离被认为是该方向上的冠幅,取两个正交剖面提取的冠幅的平均值为最终的冠幅[48]. ...
... [44].首先以树顶像元为中心提取当前搜索窗口内相互正交的两个方向上的剖面数据[47],剖面横轴为水平距离,纵轴为高度值,然后对剖面内所有像元高度值构成的序列进行多项式拟合[28,30],树顶像元两边最近的两个拐点之间的水平距离被认为是该方向上的冠幅,取两个正交剖面提取的冠幅的平均值为最终的冠幅[48]. ...
... 光学数据提取单木冠层参数主要有两种方式,一种是利用图像分割算法、局部最大值法等在光学图像上直接提取[44],另一种是通过数字光学图像的多立体摄影测量方法提取点云数据,生成CHM栅格数据,在栅格数据上提取参数[45].单木树冠分割包括单木位置监测和树冠边界分割,从CHM栅格数据和原始光谱数据出发[28],利用图像分割算法来实现单木分割,常用算法有分水岭算法[30],多尺度分割算法[32]、多项式拟合算法[50]、特征点决策树法[49]等,以上算法中多尺度分割和分水岭算法的分割效果更为突出[30,32]. ...
激光雷达森林参数反演研究进展
1
2016
... 光学数据提取单木冠层参数主要有两种方式,一种是利用图像分割算法、局部最大值法等在光学图像上直接提取[44],另一种是通过数字光学图像的多立体摄影测量方法提取点云数据,生成CHM栅格数据,在栅格数据上提取参数[45].单木树冠分割包括单木位置监测和树冠边界分割,从CHM栅格数据和原始光谱数据出发[28],利用图像分割算法来实现单木分割,常用算法有分水岭算法[30],多尺度分割算法[32]、多项式拟合算法[50]、特征点决策树法[49]等,以上算法中多尺度分割和分水岭算法的分割效果更为突出[30,32]. ...
激光雷达森林参数反演研究进展
1
2016
... 光学数据提取单木冠层参数主要有两种方式,一种是利用图像分割算法、局部最大值法等在光学图像上直接提取[44],另一种是通过数字光学图像的多立体摄影测量方法提取点云数据,生成CHM栅格数据,在栅格数据上提取参数[45].单木树冠分割包括单木位置监测和树冠边界分割,从CHM栅格数据和原始光谱数据出发[28],利用图像分割算法来实现单木分割,常用算法有分水岭算法[30],多尺度分割算法[32]、多项式拟合算法[50]、特征点决策树法[49]等,以上算法中多尺度分割和分水岭算法的分割效果更为突出[30,32]. ...
New Development of Forest Canopy Height Remote Sensing
1
2016
... (3)冠层高度分布剖面描述了包含枝叶及非光合作用组织在垂直高度上的点云密度分布情况,用一定高度间隔内的点云数占点云总数的比值表示[44-46].冠层剖面的高度最大值即为树冠高度,该像元即为树顶像元.在确定树顶像元位置和搜索窗口之后,进行冠层边缘提取操作[44].首先以树顶像元为中心提取当前搜索窗口内相互正交的两个方向上的剖面数据[47],剖面横轴为水平距离,纵轴为高度值,然后对剖面内所有像元高度值构成的序列进行多项式拟合[28,30],树顶像元两边最近的两个拐点之间的水平距离被认为是该方向上的冠幅,取两个正交剖面提取的冠幅的平均值为最终的冠幅[48]. ...
Automated Tree Detection and Crown Delineation Using Airborne Laser Scanner Data in Heterogeneous East-Central Europe Forest with Different Species Mix
1
2017
... (3)冠层高度分布剖面描述了包含枝叶及非光合作用组织在垂直高度上的点云密度分布情况,用一定高度间隔内的点云数占点云总数的比值表示[44-46].冠层剖面的高度最大值即为树冠高度,该像元即为树顶像元.在确定树顶像元位置和搜索窗口之后,进行冠层边缘提取操作[44].首先以树顶像元为中心提取当前搜索窗口内相互正交的两个方向上的剖面数据[47],剖面横轴为水平距离,纵轴为高度值,然后对剖面内所有像元高度值构成的序列进行多项式拟合[28,30],树顶像元两边最近的两个拐点之间的水平距离被认为是该方向上的冠幅,取两个正交剖面提取的冠幅的平均值为最终的冠幅[48]. ...
机载LiDAR数据估算样地和单木尺度森林地上生物量
1
2015
... (3)冠层高度分布剖面描述了包含枝叶及非光合作用组织在垂直高度上的点云密度分布情况,用一定高度间隔内的点云数占点云总数的比值表示[44-46].冠层剖面的高度最大值即为树冠高度,该像元即为树顶像元.在确定树顶像元位置和搜索窗口之后,进行冠层边缘提取操作[44].首先以树顶像元为中心提取当前搜索窗口内相互正交的两个方向上的剖面数据[47],剖面横轴为水平距离,纵轴为高度值,然后对剖面内所有像元高度值构成的序列进行多项式拟合[28,30],树顶像元两边最近的两个拐点之间的水平距离被认为是该方向上的冠幅,取两个正交剖面提取的冠幅的平均值为最终的冠幅[48]. ...
机载LiDAR数据估算样地和单木尺度森林地上生物量
1
2015
... (3)冠层高度分布剖面描述了包含枝叶及非光合作用组织在垂直高度上的点云密度分布情况,用一定高度间隔内的点云数占点云总数的比值表示[44-46].冠层剖面的高度最大值即为树冠高度,该像元即为树顶像元.在确定树顶像元位置和搜索窗口之后,进行冠层边缘提取操作[44].首先以树顶像元为中心提取当前搜索窗口内相互正交的两个方向上的剖面数据[47],剖面横轴为水平距离,纵轴为高度值,然后对剖面内所有像元高度值构成的序列进行多项式拟合[28,30],树顶像元两边最近的两个拐点之间的水平距离被认为是该方向上的冠幅,取两个正交剖面提取的冠幅的平均值为最终的冠幅[48]. ...
Estimation of Forest Leaf Area Index Using Height and Canopy Cover Information Extracted from Unmanned Aerial Vehicle Stereo Imagery
2
2019
... 光学数据提取单木冠层参数主要有两种方式,一种是利用图像分割算法、局部最大值法等在光学图像上直接提取[44],另一种是通过数字光学图像的多立体摄影测量方法提取点云数据,生成CHM栅格数据,在栅格数据上提取参数[45].单木树冠分割包括单木位置监测和树冠边界分割,从CHM栅格数据和原始光谱数据出发[28],利用图像分割算法来实现单木分割,常用算法有分水岭算法[30],多尺度分割算法[32]、多项式拟合算法[50]、特征点决策树法[49]等,以上算法中多尺度分割和分水岭算法的分割效果更为突出[30,32]. ...
... Dandois等[12]利用无人机外设数码摄像机拍摄了大量高度重叠的低空航空图片,得到的三维点云密度为30~67个/m2,点云的地理定位精度为1.2~4.1 m水平径向和0.4~12 m垂直(均方根误差RMSE),实验证明了摄影测量法得到的CHM是实地测量的树木高度的强预测因子,对于38个研究区域其相关性R2介于0.63~0.84之间.Zhang等[49]利用光学图像作为数据源,比较了基于CHM的分水岭算法和基于点云的聚类算法,前者的分割率为68.55%,分割准确率为57.46%,精度明显高于点云聚类法.在树冠分割后,可以进行树冠参数的提取,如面积大小、冠幅大小等.Laurel等[50]针对无人机高光谱数据采用面向对象的多尺度分割算法,获取了单木树冠的轮廓和位置信息. ...
Tree Species Classification Using Hyperspectral Imagery: A Comparison of Two Classifiers
2
2016
... 光学数据提取单木冠层参数主要有两种方式,一种是利用图像分割算法、局部最大值法等在光学图像上直接提取[44],另一种是通过数字光学图像的多立体摄影测量方法提取点云数据,生成CHM栅格数据,在栅格数据上提取参数[45].单木树冠分割包括单木位置监测和树冠边界分割,从CHM栅格数据和原始光谱数据出发[28],利用图像分割算法来实现单木分割,常用算法有分水岭算法[30],多尺度分割算法[32]、多项式拟合算法[50]、特征点决策树法[49]等,以上算法中多尺度分割和分水岭算法的分割效果更为突出[30,32]. ...
... Dandois等[12]利用无人机外设数码摄像机拍摄了大量高度重叠的低空航空图片,得到的三维点云密度为30~67个/m2,点云的地理定位精度为1.2~4.1 m水平径向和0.4~12 m垂直(均方根误差RMSE),实验证明了摄影测量法得到的CHM是实地测量的树木高度的强预测因子,对于38个研究区域其相关性R2介于0.63~0.84之间.Zhang等[49]利用光学图像作为数据源,比较了基于CHM的分水岭算法和基于点云的聚类算法,前者的分割率为68.55%,分割准确率为57.46%,精度明显高于点云聚类法.在树冠分割后,可以进行树冠参数的提取,如面积大小、冠幅大小等.Laurel等[50]针对无人机高光谱数据采用面向对象的多尺度分割算法,获取了单木树冠的轮廓和位置信息. ...
UAV-based Forest Fire Detection and Tracking Using Image Processing Techniques
1
2015
... 林分是森林的内部结构特征大体相似而与邻近地段又有明显区别的森林[51],可以根据树种组成、森林起源、林龄和林冠层次等因子划分林分类型[52].林分结构因子可以直观地反映林分的生长状况,按照测量方式的不同[53],林分结构因子包括两类,一类是通过单木因子统计得到的,例如林分密度、林分蓄积量等,另一类是直接测量得到的,如郁闭度、叶面积指数等[54]. ...
UAV-based Forest Fire Detection and Tracking Using Image Processing Techniques
1
2015
... 林分是森林的内部结构特征大体相似而与邻近地段又有明显区别的森林[51],可以根据树种组成、森林起源、林龄和林冠层次等因子划分林分类型[52].林分结构因子可以直观地反映林分的生长状况,按照测量方式的不同[53],林分结构因子包括两类,一类是通过单木因子统计得到的,例如林分密度、林分蓄积量等,另一类是直接测量得到的,如郁闭度、叶面积指数等[54]. ...
Fire Detection using Infrared Images for UAV-based Forest Fire Surveillance
1
2017
... 林分是森林的内部结构特征大体相似而与邻近地段又有明显区别的森林[51],可以根据树种组成、森林起源、林龄和林冠层次等因子划分林分类型[52].林分结构因子可以直观地反映林分的生长状况,按照测量方式的不同[53],林分结构因子包括两类,一类是通过单木因子统计得到的,例如林分密度、林分蓄积量等,另一类是直接测量得到的,如郁闭度、叶面积指数等[54]. ...
Derivation of Forest Parameters from Stereographic UAV Data- A Comparison with Airborne LiDAR Data
1
2016
... 林分是森林的内部结构特征大体相似而与邻近地段又有明显区别的森林[51],可以根据树种组成、森林起源、林龄和林冠层次等因子划分林分类型[52].林分结构因子可以直观地反映林分的生长状况,按照测量方式的不同[53],林分结构因子包括两类,一类是通过单木因子统计得到的,例如林分密度、林分蓄积量等,另一类是直接测量得到的,如郁闭度、叶面积指数等[54]. ...
Comparison of UAV and WorldView-2 Imagery for Mapping Leaf Area Index of Mangrove Forest
1
2017
... 林分是森林的内部结构特征大体相似而与邻近地段又有明显区别的森林[51],可以根据树种组成、森林起源、林龄和林冠层次等因子划分林分类型[52].林分结构因子可以直观地反映林分的生长状况,按照测量方式的不同[53],林分结构因子包括两类,一类是通过单木因子统计得到的,例如林分密度、林分蓄积量等,另一类是直接测量得到的,如郁闭度、叶面积指数等[54]. ...
Modeling Urban Distributions of Host Trees for Invasive Forest Insects in the Eastern and Central USA: A Three-step Approach Using Field Inventory Data
1
2018
... (2)常见的回归模型:分为参数与非参数模型两类,其中参数模型有线性回归模型,非参数模型有支持向量机、人工神经网络、KNN近邻法和随机森林等[55].支持向量机可以克服传统预测方法数据不足和过学习等缺陷[40],在解决小样本和高维度问题中具有独特优势,但是核函数的选择会对估测结果造成影响,数据维度过高时也会降低模型的预测精度[56].人工神经网络可以有效解决数据的非线性、非高斯和噪声等问题,建模时不需要给出具体的数学函数,能够一次性引入或输出多个参量[8],但存在易过度拟合、模型泛化能力弱、物理机理不明确等问题[10].KNN算法能够保持参数间的一致性,避免样本的不平衡问题,但是它在实际计算中十分耗时[57].随机森林算法对噪声有很好的鲁棒性,训练复杂度低,而且预测迅速,但仍然存在易过拟合的问题[58]. ...
森林地上生物量遥感反演方法综述
1
2015
... (2)常见的回归模型:分为参数与非参数模型两类,其中参数模型有线性回归模型,非参数模型有支持向量机、人工神经网络、KNN近邻法和随机森林等[55].支持向量机可以克服传统预测方法数据不足和过学习等缺陷[40],在解决小样本和高维度问题中具有独特优势,但是核函数的选择会对估测结果造成影响,数据维度过高时也会降低模型的预测精度[56].人工神经网络可以有效解决数据的非线性、非高斯和噪声等问题,建模时不需要给出具体的数学函数,能够一次性引入或输出多个参量[8],但存在易过度拟合、模型泛化能力弱、物理机理不明确等问题[10].KNN算法能够保持参数间的一致性,避免样本的不平衡问题,但是它在实际计算中十分耗时[57].随机森林算法对噪声有很好的鲁棒性,训练复杂度低,而且预测迅速,但仍然存在易过拟合的问题[58]. ...
森林地上生物量遥感反演方法综述
1
2015
... (2)常见的回归模型:分为参数与非参数模型两类,其中参数模型有线性回归模型,非参数模型有支持向量机、人工神经网络、KNN近邻法和随机森林等[55].支持向量机可以克服传统预测方法数据不足和过学习等缺陷[40],在解决小样本和高维度问题中具有独特优势,但是核函数的选择会对估测结果造成影响,数据维度过高时也会降低模型的预测精度[56].人工神经网络可以有效解决数据的非线性、非高斯和噪声等问题,建模时不需要给出具体的数学函数,能够一次性引入或输出多个参量[8],但存在易过度拟合、模型泛化能力弱、物理机理不明确等问题[10].KNN算法能够保持参数间的一致性,避免样本的不平衡问题,但是它在实际计算中十分耗时[57].随机森林算法对噪声有很好的鲁棒性,训练复杂度低,而且预测迅速,但仍然存在易过拟合的问题[58]. ...
Estimating Biomass and Nitrogen Amount of Barley and Grass Using UAV and Aircraft based Spectral and Photogrammetric 3D Features
1
2018
... (2)常见的回归模型:分为参数与非参数模型两类,其中参数模型有线性回归模型,非参数模型有支持向量机、人工神经网络、KNN近邻法和随机森林等[55].支持向量机可以克服传统预测方法数据不足和过学习等缺陷[40],在解决小样本和高维度问题中具有独特优势,但是核函数的选择会对估测结果造成影响,数据维度过高时也会降低模型的预测精度[56].人工神经网络可以有效解决数据的非线性、非高斯和噪声等问题,建模时不需要给出具体的数学函数,能够一次性引入或输出多个参量[8],但存在易过度拟合、模型泛化能力弱、物理机理不明确等问题[10].KNN算法能够保持参数间的一致性,避免样本的不平衡问题,但是它在实际计算中十分耗时[57].随机森林算法对噪声有很好的鲁棒性,训练复杂度低,而且预测迅速,但仍然存在易过拟合的问题[58]. ...
机载LiDAR高差和高分影像的城市树冠提取比较
1
2017
... (2)常见的回归模型:分为参数与非参数模型两类,其中参数模型有线性回归模型,非参数模型有支持向量机、人工神经网络、KNN近邻法和随机森林等[55].支持向量机可以克服传统预测方法数据不足和过学习等缺陷[40],在解决小样本和高维度问题中具有独特优势,但是核函数的选择会对估测结果造成影响,数据维度过高时也会降低模型的预测精度[56].人工神经网络可以有效解决数据的非线性、非高斯和噪声等问题,建模时不需要给出具体的数学函数,能够一次性引入或输出多个参量[8],但存在易过度拟合、模型泛化能力弱、物理机理不明确等问题[10].KNN算法能够保持参数间的一致性,避免样本的不平衡问题,但是它在实际计算中十分耗时[57].随机森林算法对噪声有很好的鲁棒性,训练复杂度低,而且预测迅速,但仍然存在易过拟合的问题[58]. ...
机载LiDAR高差和高分影像的城市树冠提取比较
1
2017
... (2)常见的回归模型:分为参数与非参数模型两类,其中参数模型有线性回归模型,非参数模型有支持向量机、人工神经网络、KNN近邻法和随机森林等[55].支持向量机可以克服传统预测方法数据不足和过学习等缺陷[40],在解决小样本和高维度问题中具有独特优势,但是核函数的选择会对估测结果造成影响,数据维度过高时也会降低模型的预测精度[56].人工神经网络可以有效解决数据的非线性、非高斯和噪声等问题,建模时不需要给出具体的数学函数,能够一次性引入或输出多个参量[8],但存在易过度拟合、模型泛化能力弱、物理机理不明确等问题[10].KNN算法能够保持参数间的一致性,避免样本的不平衡问题,但是它在实际计算中十分耗时[57].随机森林算法对噪声有很好的鲁棒性,训练复杂度低,而且预测迅速,但仍然存在易过拟合的问题[58]. ...
机载激光雷达森林垂直结构剖面参数的沿海平原人工林林分特征反演
1
2018
... 针对激光雷达数据通常以归一化点云、冠层垂直剖面特征变量、枝叶剖面特征变量[59]、高度特征变量和密度特征变量等作为回归模型的训练集.Luo等[4]针对机载激光雷达的全波数据,采用随机森林回归方法建立生物量反演模型,估算精度为R2=0.84,RMSE=14.60 Mg/ha.Cao等[75]利用主成分分析法,针对从激光雷达数据中提取出的有效叶面积指数、高度和胸径建立地上生物量的回归模型,预测竹林的生物量R2为0.59~0.87,RMSE为11.92%~21.11%. ...
机载激光雷达森林垂直结构剖面参数的沿海平原人工林林分特征反演
1
2018
... 针对激光雷达数据通常以归一化点云、冠层垂直剖面特征变量、枝叶剖面特征变量[59]、高度特征变量和密度特征变量等作为回归模型的训练集.Luo等[4]针对机载激光雷达的全波数据,采用随机森林回归方法建立生物量反演模型,估算精度为R2=0.84,RMSE=14.60 Mg/ha.Cao等[75]利用主成分分析法,针对从激光雷达数据中提取出的有效叶面积指数、高度和胸径建立地上生物量的回归模型,预测竹林的生物量R2为0.59~0.87,RMSE为11.92%~21.11%. ...
Examining Conifer Canopy Structural Complexity Across Forest Ages and Elevations with LiDAR Data
1
2010
... 冠层覆盖度(即郁闭度)的遥感测量法大致可以分为遥感提取法(直接法)和特征变量法模型法(间接法)[60].直接法是通过对光学或雷达图形的分析判读,提取冠层像元并统计郁闭像元的个数来计算郁闭度[62];间接法是通过遥感影像数据或雷达数据提取特征变量,结合实测郁闭度构建数学模型来预测整个区域的森林覆盖度[61]. ...
Analysis of Forest Structural Complexity Using Airborne LiDAR Data and Aerial Photography in a Mixed Conifer–broadleaf Forest in Northern Japan
1
2018
... 冠层覆盖度(即郁闭度)的遥感测量法大致可以分为遥感提取法(直接法)和特征变量法模型法(间接法)[60].直接法是通过对光学或雷达图形的分析判读,提取冠层像元并统计郁闭像元的个数来计算郁闭度[62];间接法是通过遥感影像数据或雷达数据提取特征变量,结合实测郁闭度构建数学模型来预测整个区域的森林覆盖度[61]. ...
Estimation of Forest Structure and Canopy Fuel Parameters from Small-footprint Full-waveform LiDAR Data
2
2014
... 冠层覆盖度(即郁闭度)的遥感测量法大致可以分为遥感提取法(直接法)和特征变量法模型法(间接法)[60].直接法是通过对光学或雷达图形的分析判读,提取冠层像元并统计郁闭像元的个数来计算郁闭度[62];间接法是通过遥感影像数据或雷达数据提取特征变量,结合实测郁闭度构建数学模型来预测整个区域的森林覆盖度[61]. ...
... 采用无人机激光雷达数据计算冠层覆盖度一般有两种方法,一种方法是计算森林冠层回波数与所有点云回波的比例CCDR1(如公式(1)所示),另一种方法是计算森林冠层能量与所有回波能量的比值CCDR2(如公式(2)所示)[62]. ...
Characterizing Forest Canopy Structure with LiDAR Composite Metrics and Machine Learning
1
2011
... 其中:是冠层回波数,是地面回波数,是冠层累计强度,是地面累计强度.为了计算覆盖度,必须设置一个高程阈值对森林冠层回波与地面回波进行区分,Gao等[63]的研究表明,采用首次回波点云计算的离散点云特征参数更适合估算森林结构参数. ...
集成U-Net 方法的无人机影像胡杨树冠提取和计数
2
2019
... 除了激光雷达数据,无人机多光谱数据也可以用于估算冠层覆盖度.常见方法是在提取植被指数或对图像的颜色空间进行变换之后,采用像元统计法得到郁闭度估计值[12].Francesco Chianucci等[64]利用无人机得到的高分辨率RGB图像,使用了绿叶算法对图像进行变换(如公式(3)所示),将GLA≤0的像素点定义为黑色背景区,再用K-Means算法对其进行分类,得到覆盖度的估计值的皮尔逊相关系数R2=0.7. ...
... 总体来看,机载激光雷达数据可以根据接收回波的时间差明显区分冠层回波和地面回波,针对回波做简单的数学统计就可以获得覆盖度,但由于激光束呈点状分布,所以在点云密度较低时极易忽略冠层的边缘信息,引入误差.而机载光学影像可以提供丰富的冠层纹理信息和光谱信息,并且已广泛应用在林分冠层覆盖度的提取中.研究表明在对光学数据进行波段组合计算之后,冠层覆盖度的提取精度更高,此外,加入近红和红边波段信息也可提高计算精度[64],但阴影和冠层的光谱特征极为相近,容易造成误分,因此可以考虑在预处理阶段去除阴影或者在通过波段组合运算将二者区分. ...
集成U-Net 方法的无人机影像胡杨树冠提取和计数
2
2019
... 除了激光雷达数据,无人机多光谱数据也可以用于估算冠层覆盖度.常见方法是在提取植被指数或对图像的颜色空间进行变换之后,采用像元统计法得到郁闭度估计值[12].Francesco Chianucci等[64]利用无人机得到的高分辨率RGB图像,使用了绿叶算法对图像进行变换(如公式(3)所示),将GLA≤0的像素点定义为黑色背景区,再用K-Means算法对其进行分类,得到覆盖度的估计值的皮尔逊相关系数R2=0.7. ...
... 总体来看,机载激光雷达数据可以根据接收回波的时间差明显区分冠层回波和地面回波,针对回波做简单的数学统计就可以获得覆盖度,但由于激光束呈点状分布,所以在点云密度较低时极易忽略冠层的边缘信息,引入误差.而机载光学影像可以提供丰富的冠层纹理信息和光谱信息,并且已广泛应用在林分冠层覆盖度的提取中.研究表明在对光学数据进行波段组合计算之后,冠层覆盖度的提取精度更高,此外,加入近红和红边波段信息也可提高计算精度[64],但阴影和冠层的光谱特征极为相近,容易造成误分,因此可以考虑在预处理阶段去除阴影或者在通过波段组合运算将二者区分. ...
Estimation of Clumping Index and LAI from Terrestrial LiDAR Data
2
2016
... 叶面积代表植物与大气的界面,叶面积的大小影响着森林的碳吸收、蒸腾作用与冠层截留等生长活动[65].此外,光的可利用性也受叶面积垂直分布的强烈影响.在高大的常绿植被中测量叶面积并非易事,因此遥感估算法更为常用[66].叶面积指数的光学遥感估计算方式主要有两种:一是物理模型法,二是通过遥感影像提取的森林结构信息结合回归算法建立反演模型[69].但这两种方式都存在着缺陷,异速生长方程需要森林每个位置的详细信息,并且对物种组成和森林结构十分敏感,泛用性差[67].光学传感器无法区分被树叶和树的枝干截获的光线,除非对木材面积进行校正,否则光学传感器只能估算植物的面积指数,而不是叶面积指数[68].因此光学数据不适合代入模型估算叶面积指数,只适合建立回归预测模型. ...
... 其中:为FP关于高度z的分布函数,为LAI关于高度z的累积函数,和分别表示不同冠层高度[65]. ...
Comparative Performances of Airborne LiDAR Height and Intensity Data for Leaf Area Index Estimation
1
2017
... 叶面积代表植物与大气的界面,叶面积的大小影响着森林的碳吸收、蒸腾作用与冠层截留等生长活动[65].此外,光的可利用性也受叶面积垂直分布的强烈影响.在高大的常绿植被中测量叶面积并非易事,因此遥感估算法更为常用[66].叶面积指数的光学遥感估计算方式主要有两种:一是物理模型法,二是通过遥感影像提取的森林结构信息结合回归算法建立反演模型[69].但这两种方式都存在着缺陷,异速生长方程需要森林每个位置的详细信息,并且对物种组成和森林结构十分敏感,泛用性差[67].光学传感器无法区分被树叶和树的枝干截获的光线,除非对木材面积进行校正,否则光学传感器只能估算植物的面积指数,而不是叶面积指数[68].因此光学数据不适合代入模型估算叶面积指数,只适合建立回归预测模型. ...
最小二乘法联合光学与雷达遥感数据估算玉米叶面积指数
1
2016
... 叶面积代表植物与大气的界面,叶面积的大小影响着森林的碳吸收、蒸腾作用与冠层截留等生长活动[65].此外,光的可利用性也受叶面积垂直分布的强烈影响.在高大的常绿植被中测量叶面积并非易事,因此遥感估算法更为常用[66].叶面积指数的光学遥感估计算方式主要有两种:一是物理模型法,二是通过遥感影像提取的森林结构信息结合回归算法建立反演模型[69].但这两种方式都存在着缺陷,异速生长方程需要森林每个位置的详细信息,并且对物种组成和森林结构十分敏感,泛用性差[67].光学传感器无法区分被树叶和树的枝干截获的光线,除非对木材面积进行校正,否则光学传感器只能估算植物的面积指数,而不是叶面积指数[68].因此光学数据不适合代入模型估算叶面积指数,只适合建立回归预测模型. ...
最小二乘法联合光学与雷达遥感数据估算玉米叶面积指数
1
2016
... 叶面积代表植物与大气的界面,叶面积的大小影响着森林的碳吸收、蒸腾作用与冠层截留等生长活动[65].此外,光的可利用性也受叶面积垂直分布的强烈影响.在高大的常绿植被中测量叶面积并非易事,因此遥感估算法更为常用[66].叶面积指数的光学遥感估计算方式主要有两种:一是物理模型法,二是通过遥感影像提取的森林结构信息结合回归算法建立反演模型[69].但这两种方式都存在着缺陷,异速生长方程需要森林每个位置的详细信息,并且对物种组成和森林结构十分敏感,泛用性差[67].光学传感器无法区分被树叶和树的枝干截获的光线,除非对木材面积进行校正,否则光学传感器只能估算植物的面积指数,而不是叶面积指数[68].因此光学数据不适合代入模型估算叶面积指数,只适合建立回归预测模型. ...
Bayesian Estimation of Seasonal Course of Canopy Leaf Area Index from Hyperspectral Satellite Data
1
2018
... 叶面积代表植物与大气的界面,叶面积的大小影响着森林的碳吸收、蒸腾作用与冠层截留等生长活动[65].此外,光的可利用性也受叶面积垂直分布的强烈影响.在高大的常绿植被中测量叶面积并非易事,因此遥感估算法更为常用[66].叶面积指数的光学遥感估计算方式主要有两种:一是物理模型法,二是通过遥感影像提取的森林结构信息结合回归算法建立反演模型[69].但这两种方式都存在着缺陷,异速生长方程需要森林每个位置的详细信息,并且对物种组成和森林结构十分敏感,泛用性差[67].光学传感器无法区分被树叶和树的枝干截获的光线,除非对木材面积进行校正,否则光学传感器只能估算植物的面积指数,而不是叶面积指数[68].因此光学数据不适合代入模型估算叶面积指数,只适合建立回归预测模型. ...
Mapping Multi‐scale Vascular Plant Richness in a Forest Landscape with Integrated LiDAR and Hyperspectral Remote Sensing
3
2018
... 叶面积代表植物与大气的界面,叶面积的大小影响着森林的碳吸收、蒸腾作用与冠层截留等生长活动[65].此外,光的可利用性也受叶面积垂直分布的强烈影响.在高大的常绿植被中测量叶面积并非易事,因此遥感估算法更为常用[66].叶面积指数的光学遥感估计算方式主要有两种:一是物理模型法,二是通过遥感影像提取的森林结构信息结合回归算法建立反演模型[69].但这两种方式都存在着缺陷,异速生长方程需要森林每个位置的详细信息,并且对物种组成和森林结构十分敏感,泛用性差[67].光学传感器无法区分被树叶和树的枝干截获的光线,除非对木材面积进行校正,否则光学传感器只能估算植物的面积指数,而不是叶面积指数[68].因此光学数据不适合代入模型估算叶面积指数,只适合建立回归预测模型. ...
... (1)枝叶剖面模型FP是森林生理元素(树叶、细枝等)的垂直分布状况,描述了冠层内叶面积随着高度变化的分布状况[69],用地面以上冠层高度处的单位体积内单位水平面积的枝叶面积总和表示[70].枝叶剖面(FP)与叶面积指数(LAI)在垂直高度上的变化密切相关[69,70],公式为: ...
... [69,70],公式为: ...
Profile Distribution of Soil Organic and Inorganic Carbon Under Different Land Use Types in the Loess Plateau of Northern Shaanxi
2
2018
... (1)枝叶剖面模型FP是森林生理元素(树叶、细枝等)的垂直分布状况,描述了冠层内叶面积随着高度变化的分布状况[69],用地面以上冠层高度处的单位体积内单位水平面积的枝叶面积总和表示[70].枝叶剖面(FP)与叶面积指数(LAI)在垂直高度上的变化密切相关[69,70],公式为: ...
... ,70],公式为: ...
Modeling Leaf Area Index in North America Using a Process‐based Terrestrial Ecosystem Model
1
2018
... 其中:为孔隙率函数,示到达地面以上高度z处的枝叶截获的点云数量,N为冠层总回波点云数量[71]. ...
Forest LAI Estimation Comparison Using LiDAR and Hyperspectral Data in Boreal and Temperate Forests
2
2009
... 针对激光雷达数据可以通过建立模型的方式得到叶面积指数,常用的模型有枝叶剖面模型(FP)、基于朗伯定律的衍生模型等[72]. ...
... Solberg等[72]用机载激光雷达扫描数据计算了4种不同的穿透变量,最简单的一种是地面上的第一次反射的比例.结果表明,森林有效叶面积指数可以通过线性回归模型用最简单的渗透变量来估计,R2=0.93,均方根误差RMSE=0.36.Alonzo等[73]使用从激光雷达点云获得的激光穿透量度来估计森林有效叶面积指数.同时,他们对单木冠层进行分割,采用包括高度在内的结构指标来预测个体树的LAI,计算结果与实测值吻合较好.这些研究证明了森林高度信息在估算森林LAI中的重要性.Zhang等[74]从无人机立体图像中提取了冠层高度模型和数字正射影像图(DOM),然后提取森林高度和冠层覆盖度,以此为自变量建立有效叶面积指数的估算模型,估测精度为R2=0.833,RMSE=0.288,并且比较了分割法和高度指数法对LAI估测模型的贡献值,实验证明采用分割法的模型准确率更高. ...
Urban Tree Species Mapping Using Hyperspectral and LiDAR Data Fusion
1
2014
... Solberg等[72]用机载激光雷达扫描数据计算了4种不同的穿透变量,最简单的一种是地面上的第一次反射的比例.结果表明,森林有效叶面积指数可以通过线性回归模型用最简单的渗透变量来估计,R2=0.93,均方根误差RMSE=0.36.Alonzo等[73]使用从激光雷达点云获得的激光穿透量度来估计森林有效叶面积指数.同时,他们对单木冠层进行分割,采用包括高度在内的结构指标来预测个体树的LAI,计算结果与实测值吻合较好.这些研究证明了森林高度信息在估算森林LAI中的重要性.Zhang等[74]从无人机立体图像中提取了冠层高度模型和数字正射影像图(DOM),然后提取森林高度和冠层覆盖度,以此为自变量建立有效叶面积指数的估算模型,估测精度为R2=0.833,RMSE=0.288,并且比较了分割法和高度指数法对LAI估测模型的贡献值,实验证明采用分割法的模型准确率更高. ...
Estimation of Forest Leaf Area Index Using Height and Canopy Cover Information Extracted from Unmanned Aerial Vehicle Stereo Imagery
1
2019
... Solberg等[72]用机载激光雷达扫描数据计算了4种不同的穿透变量,最简单的一种是地面上的第一次反射的比例.结果表明,森林有效叶面积指数可以通过线性回归模型用最简单的渗透变量来估计,R2=0.93,均方根误差RMSE=0.36.Alonzo等[73]使用从激光雷达点云获得的激光穿透量度来估计森林有效叶面积指数.同时,他们对单木冠层进行分割,采用包括高度在内的结构指标来预测个体树的LAI,计算结果与实测值吻合较好.这些研究证明了森林高度信息在估算森林LAI中的重要性.Zhang等[74]从无人机立体图像中提取了冠层高度模型和数字正射影像图(DOM),然后提取森林高度和冠层覆盖度,以此为自变量建立有效叶面积指数的估算模型,估测精度为R2=0.833,RMSE=0.288,并且比较了分割法和高度指数法对LAI估测模型的贡献值,实验证明采用分割法的模型准确率更高. ...
Estimating Canopy Structure and Biomass in Bamboo Forests Using Airborne LiDAR Data
1
2019
... 针对激光雷达数据通常以归一化点云、冠层垂直剖面特征变量、枝叶剖面特征变量[59]、高度特征变量和密度特征变量等作为回归模型的训练集.Luo等[4]针对机载激光雷达的全波数据,采用随机森林回归方法建立生物量反演模型,估算精度为R2=0.84,RMSE=14.60 Mg/ha.Cao等[75]利用主成分分析法,针对从激光雷达数据中提取出的有效叶面积指数、高度和胸径建立地上生物量的回归模型,预测竹林的生物量R2为0.59~0.87,RMSE为11.92%~21.11%. ...
AGB Estimation in a Tropical Mountain Forest (TMF) by Means of RGB and Multispectral Images Using an Unmanned Aerial Vehicle (UAV)
1
2019
... 利用光学遥感数据可以提取植被指数、纹理特征和原始的光谱反射数据作为特征变量[6].González-Jaramillo等[76]针对无人机采集的RGB图像,对比了两种生物量估测模型的精度,一种是利用数字图像摄影法生成点云数据,从中估算出树高和胸径的大小带入异速生长方程,另一种是针对机载多光谱数据提取出均一化植被指数(NDVI),再建立NDVI与生物量之间的回归方程,实验结果表明前者的生物量估测精度更高(R2=0.85). ...
Comparison of Four UAV Georeferencing Methods for Environmental Monitoring Purposes Focusing on the Combined Use with Airborne and Satellite Remote Sensing Platforms
0
2019
基于高分二号遥感影像的树种分类方法
1
2019
... 森林中不同树种呈现不同的形态、分布和生态结构[78],检测森林中由生物或非生物因素引起的病虫害是对森林的可持续发展十分必要.在森林发生病虫害时,受影响的林木会表现出一定的病理变化,如落叶、枯萎、黄化等,并且导致冠层反射特征变化[79].基于无人机数据,研究人员可以通过结构参数、光谱响应和植被结构来对树种和树的健康程度进行分类[80],针对树的分类分为像素级和单个树冠级两种,采用的分类方法多数为机器学习算法,部分采用深度学习算法[81]. ...
基于高分二号遥感影像的树种分类方法
1
2019
... 森林中不同树种呈现不同的形态、分布和生态结构[78],检测森林中由生物或非生物因素引起的病虫害是对森林的可持续发展十分必要.在森林发生病虫害时,受影响的林木会表现出一定的病理变化,如落叶、枯萎、黄化等,并且导致冠层反射特征变化[79].基于无人机数据,研究人员可以通过结构参数、光谱响应和植被结构来对树种和树的健康程度进行分类[80],针对树的分类分为像素级和单个树冠级两种,采用的分类方法多数为机器学习算法,部分采用深度学习算法[81]. ...
Evaluating the Effectiveness of Unmanned Aerial Systems (UAS) for Collecting Thematic Map Accuracy Assessment Reference Data in New England Forests
4
2019
... 森林中不同树种呈现不同的形态、分布和生态结构[78],检测森林中由生物或非生物因素引起的病虫害是对森林的可持续发展十分必要.在森林发生病虫害时,受影响的林木会表现出一定的病理变化,如落叶、枯萎、黄化等,并且导致冠层反射特征变化[79].基于无人机数据,研究人员可以通过结构参数、光谱响应和植被结构来对树种和树的健康程度进行分类[80],针对树的分类分为像素级和单个树冠级两种,采用的分类方法多数为机器学习算法,部分采用深度学习算法[81]. ...
... Frasor等[79]基于无人机获取的RGB影像对研究区域内的针叶类和阔叶类树种进行分类,分类精度为85.71%.Brovkina等[80]利用无人机近红外图像和实验区域的几何数据对森林的树种和枯死树木进行分类,实验证明了归一化植被指数在云杉树种定性分类方面的潜力.Cao等[81]从无人机高光谱图像中提取了光谱特征、纹理特征和植被指数,将研究区域分为不同种类的红杉树和不同地物覆盖类型,K近邻和支持向量机两种分类器的分类精度分别为76.12%(Kappa=0.73)、82.39%(Kappa=0.81).Franklin等[82]采用随机森林算法对无人机多光谱图像进行分类,白杨和桦树的整体分类精度为78%.Fromm等[83]则是利用卷积神经网络(CNN)来识别针叶树幼苗,平均精度为81%. ...
... 等[79] ...
... 树种分类和病虫害监测是林业资源清查的重要环节,基于无人机遥感数据的分类所面临的最大挑战是数据维度高,这使得选择相关性最高的变量耗时较多且易出现主观错误.在研究中需要根据待解决问题的类型,选择最适宜的分类方法.在目前分类方法研究中,效果较为突出的是随机森林和支持向量机,其中,在具有多个特征的但样本数量有限的情况下支持向量机是最佳选择,在所需要处理的数据具有高维数和多重共线性的情况下,随机森林工作得更好[79]. ...
Unmanned Aerial Vehicles (UAV) for Assessment of Qualitative Classification of Norway Spruce in Temperate Forest Stands
3
2018
... 森林中不同树种呈现不同的形态、分布和生态结构[78],检测森林中由生物或非生物因素引起的病虫害是对森林的可持续发展十分必要.在森林发生病虫害时,受影响的林木会表现出一定的病理变化,如落叶、枯萎、黄化等,并且导致冠层反射特征变化[79].基于无人机数据,研究人员可以通过结构参数、光谱响应和植被结构来对树种和树的健康程度进行分类[80],针对树的分类分为像素级和单个树冠级两种,采用的分类方法多数为机器学习算法,部分采用深度学习算法[81]. ...
... Frasor等[79]基于无人机获取的RGB影像对研究区域内的针叶类和阔叶类树种进行分类,分类精度为85.71%.Brovkina等[80]利用无人机近红外图像和实验区域的几何数据对森林的树种和枯死树木进行分类,实验证明了归一化植被指数在云杉树种定性分类方面的潜力.Cao等[81]从无人机高光谱图像中提取了光谱特征、纹理特征和植被指数,将研究区域分为不同种类的红杉树和不同地物覆盖类型,K近邻和支持向量机两种分类器的分类精度分别为76.12%(Kappa=0.73)、82.39%(Kappa=0.81).Franklin等[82]采用随机森林算法对无人机多光谱图像进行分类,白杨和桦树的整体分类精度为78%.Fromm等[83]则是利用卷积神经网络(CNN)来识别针叶树幼苗,平均精度为81%. ...
... 等[80] ...
Object-based Mangrove Species Classification Using Unmanned Aerial Vehicle Hyperspectral Images and Digital Surface Models
3
2018
... 森林中不同树种呈现不同的形态、分布和生态结构[78],检测森林中由生物或非生物因素引起的病虫害是对森林的可持续发展十分必要.在森林发生病虫害时,受影响的林木会表现出一定的病理变化,如落叶、枯萎、黄化等,并且导致冠层反射特征变化[79].基于无人机数据,研究人员可以通过结构参数、光谱响应和植被结构来对树种和树的健康程度进行分类[80],针对树的分类分为像素级和单个树冠级两种,采用的分类方法多数为机器学习算法,部分采用深度学习算法[81]. ...
... Frasor等[79]基于无人机获取的RGB影像对研究区域内的针叶类和阔叶类树种进行分类,分类精度为85.71%.Brovkina等[80]利用无人机近红外图像和实验区域的几何数据对森林的树种和枯死树木进行分类,实验证明了归一化植被指数在云杉树种定性分类方面的潜力.Cao等[81]从无人机高光谱图像中提取了光谱特征、纹理特征和植被指数,将研究区域分为不同种类的红杉树和不同地物覆盖类型,K近邻和支持向量机两种分类器的分类精度分别为76.12%(Kappa=0.73)、82.39%(Kappa=0.81).Franklin等[82]采用随机森林算法对无人机多光谱图像进行分类,白杨和桦树的整体分类精度为78%.Fromm等[83]则是利用卷积神经网络(CNN)来识别针叶树幼苗,平均精度为81%. ...
... 等[81] ...
Deciduous Tree Species Classification Using Object-based Analysis and Machine Learning with Unmanned Aerial Vehicle Multispectral Data
2
2018
... Frasor等[79]基于无人机获取的RGB影像对研究区域内的针叶类和阔叶类树种进行分类,分类精度为85.71%.Brovkina等[80]利用无人机近红外图像和实验区域的几何数据对森林的树种和枯死树木进行分类,实验证明了归一化植被指数在云杉树种定性分类方面的潜力.Cao等[81]从无人机高光谱图像中提取了光谱特征、纹理特征和植被指数,将研究区域分为不同种类的红杉树和不同地物覆盖类型,K近邻和支持向量机两种分类器的分类精度分别为76.12%(Kappa=0.73)、82.39%(Kappa=0.81).Franklin等[82]采用随机森林算法对无人机多光谱图像进行分类,白杨和桦树的整体分类精度为78%.Fromm等[83]则是利用卷积神经网络(CNN)来识别针叶树幼苗,平均精度为81%. ...
... 等[82] ...
Automated Detection of Conifer Seedlings in Drone Imagery Using Convolutional Neural Networks
2
2019
... Frasor等[79]基于无人机获取的RGB影像对研究区域内的针叶类和阔叶类树种进行分类,分类精度为85.71%.Brovkina等[80]利用无人机近红外图像和实验区域的几何数据对森林的树种和枯死树木进行分类,实验证明了归一化植被指数在云杉树种定性分类方面的潜力.Cao等[81]从无人机高光谱图像中提取了光谱特征、纹理特征和植被指数,将研究区域分为不同种类的红杉树和不同地物覆盖类型,K近邻和支持向量机两种分类器的分类精度分别为76.12%(Kappa=0.73)、82.39%(Kappa=0.81).Franklin等[82]采用随机森林算法对无人机多光谱图像进行分类,白杨和桦树的整体分类精度为78%.Fromm等[83]则是利用卷积神经网络(CNN)来识别针叶树幼苗,平均精度为81%. ...
... 等[83] ...
UAV Hyperspectral and LiDAR Data and Their Fusion for Arid and Semi‐arid Land Vegetation Monitoring
2
2018
... 由于光学数据对森林的水平结构更加敏感,激光雷达数据对森林垂直结构的感知能力更强,所以近年来针对森林参数的研究越来越注重数据融合算法.Sankey等[84]将无人机激光雷达数据和高光谱数据进行融合用于单木树种识别,研究表明两种数据源的融合比单独的任意一种数据类型表现得都更好,冠层尺度上的识别精度为84%~89%.Sothe等[85]利用无人机获取的高光谱图像和摄影测量点云数据对巴西南部亚热带森林中的16个树种进行分类,实验表明使用传统的机器学习算法分类时,将二维高光谱影像和三维点云数据整合起来可以使分类的准确率提升13%~17%. ...
... 等[84] ...
Comparative Performance of Convolutional Neural Network, Weighted and Conventional Support Vector Machine and Random Forest for Classifying Tree Species Using Hyperspectral and Photogrammetric Data
2
2020
... 由于光学数据对森林的水平结构更加敏感,激光雷达数据对森林垂直结构的感知能力更强,所以近年来针对森林参数的研究越来越注重数据融合算法.Sankey等[84]将无人机激光雷达数据和高光谱数据进行融合用于单木树种识别,研究表明两种数据源的融合比单独的任意一种数据类型表现得都更好,冠层尺度上的识别精度为84%~89%.Sothe等[85]利用无人机获取的高光谱图像和摄影测量点云数据对巴西南部亚热带森林中的16个树种进行分类,实验表明使用传统的机器学习算法分类时,将二维高光谱影像和三维点云数据整合起来可以使分类的准确率提升13%~17%. ...
... 等
[84]Sothe 等[85] | Gini 等[86] | | 传感器类型 | RGB | | | | | | | | |
| LiDAR | | | | | | | | |
| CIR | | | | | | | | |
| MSP | | | | | | | | |
| HSP | | | | | | | | |
| 精度/分类方法 | 监督 | KNN | | 79% | 76.12% | | | | | |
| DT | | | | | | 84% | | |
| RF | | | | 78% | | | 74.95% | |
| SVM | 85.71% | | | | | | 84.4% | |
| CNN | | | | | 81% | | | |
| 非监督 | 最大似然法 | | | | | | | | 79% |
注:表中CIR: Color Infrared热红外传感器;MSP: Multispectral多光谱传感器;HSP: Hyperspectral高光谱传感器;KNN: K-Nearest Neighbors K近邻算法;DT: Decision Trees决策树算法;RF: Random Forest随机森林算法;SVM: Support Vector Machine支持向量机算法;CNN: Convolutional Neural Network卷积神经网络算法 ...
Use of Unmanned Aerial Systems for Multispectral Survey and Tree Classification: A Test in a Park Area of Northern Italy
2
2014
... 还有一些研究使用了非监督分类方法,得到了精度较高的分类结果.Gini等[86]的研究比较了无监督分类和监督分类方法,探索了基于无人机的RGB和CIR图像在意大利公园地区的应用,把所有地物划分了8个等级,其中4个属于树,无监督分类方法的总体精度为50%,其中最大似然算法的分类准确率最高为79%,但仍存在部分树种无法准确识别的问题.表2列出了在本小节所讨论的单木分类研究中,使用的无人机载的传感器类型和具体分类方法对应的分类精度.这些统计数据表明,使用多源遥感数据相对于单源遥感数据能明显提高分类的精度;监督分类的总体分类精度高于非监督分类,决策树算法、支持向量机和卷积神经网络在分类效果上明显优于其他方式,其中支持向量机的分类精度最高. ...
... 等
[84]Sothe 等[85] | Gini 等[86] | | 传感器类型 | RGB | | | | | | | | |
| LiDAR | | | | | | | | |
| CIR | | | | | | | | |
| MSP | | | | | | | | |
| HSP | | | | | | | | |
| 精度/分类方法 | 监督 | KNN | | 79% | 76.12% | | | | | |
| DT | | | | | | 84% | | |
| RF | | | | 78% | | | 74.95% | |
| SVM | 85.71% | | | | | | 84.4% | |
| CNN | | | | | 81% | | | |
| 非监督 | 最大似然法 | | | | | | | | 79% |
注:表中CIR: Color Infrared热红外传感器;MSP: Multispectral多光谱传感器;HSP: Hyperspectral高光谱传感器;KNN: K-Nearest Neighbors K近邻算法;DT: Decision Trees决策树算法;RF: Random Forest随机森林算法;SVM: Support Vector Machine支持向量机算法;CNN: Convolutional Neural Network卷积神经网络算法 ...
基于无人机航测数据的森林郁闭度和蓄积量估测
2
2020
... 除此之外,苏迪等[87]采用间接方法估算出了帽儿山地区森林的冠层密度,针对无人机RGB三波段光学数据提取树冠个数、平均树高、胸径、坡度、坡向、海拔和小班面积这7个特征因子组成若干个相互独立的主成分,采用主成分回归计算得出各个成分的特征根、主成分得分、主成分累积贡献率,根据各个主成分的贡献率大小选取模型最终的主成分变量,建立郁闭度回归方程,估算精度可达83.18%. ...
... 此外,无人机遥感数据在森林病虫害识别领域中获得了较好应用.Lehmann等[87]考虑到基于无人机的RGB和热红外图像在森林病虫害检测中的优越性,提出了一种通过检测落叶和叶片反射变化来实现的低成本解决方案,为私人森林所有者检测虫害.研究人员将被两片红甲虫感染的橡树林作为研究地点,使用一个修正的NDVI来区分5个植被健康等级.获得了精度较高的非健康类橡树统计.然而,对于被感染和死亡的分支,分类结果表现得较差,一些枯枝常被错误分类.另一项由Smigaj等[88]的研究提出了一种检测疾病引起的冠层温度升高的系统. ...
基于无人机航测数据的森林郁闭度和蓄积量估测
2
2020
... 除此之外,苏迪等[87]采用间接方法估算出了帽儿山地区森林的冠层密度,针对无人机RGB三波段光学数据提取树冠个数、平均树高、胸径、坡度、坡向、海拔和小班面积这7个特征因子组成若干个相互独立的主成分,采用主成分回归计算得出各个成分的特征根、主成分得分、主成分累积贡献率,根据各个主成分的贡献率大小选取模型最终的主成分变量,建立郁闭度回归方程,估算精度可达83.18%. ...
... 此外,无人机遥感数据在森林病虫害识别领域中获得了较好应用.Lehmann等[87]考虑到基于无人机的RGB和热红外图像在森林病虫害检测中的优越性,提出了一种通过检测落叶和叶片反射变化来实现的低成本解决方案,为私人森林所有者检测虫害.研究人员将被两片红甲虫感染的橡树林作为研究地点,使用一个修正的NDVI来区分5个植被健康等级.获得了精度较高的非健康类橡树统计.然而,对于被感染和死亡的分支,分类结果表现得较差,一些枯枝常被错误分类.另一项由Smigaj等[88]的研究提出了一种检测疾病引起的冠层温度升高的系统. ...
Analysis of Unmanned Aerial System-based CIR Images in Forestry-A New Perspective to Monitor Pest Infestation Levels
1
2015
... 此外,无人机遥感数据在森林病虫害识别领域中获得了较好应用.Lehmann等[87]考虑到基于无人机的RGB和热红外图像在森林病虫害检测中的优越性,提出了一种通过检测落叶和叶片反射变化来实现的低成本解决方案,为私人森林所有者检测虫害.研究人员将被两片红甲虫感染的橡树林作为研究地点,使用一个修正的NDVI来区分5个植被健康等级.获得了精度较高的非健康类橡树统计.然而,对于被感染和死亡的分支,分类结果表现得较差,一些枯枝常被错误分类.另一项由Smigaj等[88]的研究提出了一种检测疾病引起的冠层温度升高的系统. ...
UAV-borne Thermal Imaging for Forest Health Monitoring: Detection of Disease-induced Canopy Temperature Increase
0
2015
基于资源三号影像的红树林物种分类研究
0
2018
基于资源三号影像的红树林物种分类研究
0
2018















{kind=link}
{kind=link}
{kind=link}
{kind=link}