




1 引 言
植被在水源涵养以及维持局域小气候中发挥了极其重要的角色,是生态系统中必不可少的组成部分。森林植被对全球碳库的贡献显著[1],森林结构提取对生态过程了解和建模至关重要,准确获取森林结构参数为森林生态过程的了解、自然资源的可持续管理利用奠定基础[2-3]。相对于成本、人力消耗大的传统林业调查,遥感技术为森林调查自动化提供了有力手段,而具有信息量大、细节清晰等特征的高分辨率影像能够更清晰地识别单木的纹理、轮廓特征等森林结构参数,逐渐成为森林结构调查的热点。Li等[4]采用多光谱WorldView-3数据、机载高光谱图像和激光雷达点云技术探索红树林的垂直分布结构。汪垚等[5]基于机载LVIS和星载GLAS数据,估算了不同坡度森林站点的叶面积指数,并利用实测LAI数据进行检验,在复杂地形下坡度自适应方法可以有效估算叶面积指数。
光学影像数据在估算大区域森林结构参数有独特优势,但光学遥感难以穿透森林表层,无法准确获取林下数据,在森林密集的地方数据易饱和,森林结构探测往往不够准确。激光雷达(Light Detection And Ranging,LiDAR)通过传感器发射激光获得回波确定传感器与目标地物之间距离从而获取树木的三维坐标确定森林参数,具有极高的角分辨率和距离分辨率,准确构建森林三维结构,对提高森林生物量估测和动物多样性的反演能力具有重要意义[6]。冠层高度被认为是森林生态管理的关键变量,是乔木层最基础、最主要的结构指标[7-8]。LiDAR在树高和树冠等参数测量方面占有优势,已经彻底改变了森林生态系统科学中冠层结构提取的方式。到20世纪末,机载激光雷达系统(Airborne Laser Scanning,ALS)和地基激光雷达(Terrestrial Laser Scanning,TLS)用于树高、生物量等参数估计的研究激增[9-11],森林结构属性与森林生产力之间的联系受到广泛关注。
地基雷达往往适合准确获取小区域森林结构,重建森林场景三维模型,骆钰波等[12]针对亚热带森林提出基于地面激光雷达点云数据提取森林树高、胸径及重建森林场景三维模型的方法。Shi等[13]利用机载高光谱和激光雷达数据,准确地绘制巴伐利亚森林国家公园中以云杉为主的天然森林中的单个银杉树。而对于大区域范围内森林结构参数的获取,空中激光雷达更有优势,穆喜云等[14]以内蒙古大兴安岭国家野外生态站为研究区域,通过对机载激光雷达点云数据的预处理,利用计算机编程提取点云数据的结构参数。Krause等[15]基于无人机半自动获取树高,发现实测树高往往高估而无人机测量树高往往低估。近些年,结合多源遥感数据的森林冠层参数估测受到广泛关注,邢艳秋等[16]提出一种将资源三号(ZY-3)立体影像的空间连续测量特性与LiDAR 数据的高精度定位测高优势相结合的林分平均树高估测方法。皋厦等[17]2018年以虞山国家森林公园内的典型城市森林树种为研究对象,利用获取的机载激光雷达和高光谱影像基于点云距离判断单木分割方法进行单木位置和冠幅提取。不少研究表明基于激光雷达数据提取的森林结构较为准确,可作为其他低分辨率遥感产品结果的验证数据[18-19]。
由于地表起伏引起的坡度变化会对基于LiDAR的森林冠层高度参数提取造成影响,实验在祁连山东、中部采集16处青海云杉样方,利用冠层高度模型分割单木,利用样地实测数据、正射影像对部分冠层高度提取结果目视识别,准确验证树木分割精度,并结合坡度,分析地形对树高提取的影响。针对不同海拔导致水热条件不同、同一海拔不同立地条件的山地森林,分析祁连山东、中部青海云杉冠层高度的空间变化。以典型的中纬度温带山地森林分布的祁连山为例,开展了典型树种青海云杉的单木提取并对森林分布规律开展了探讨,为森林调查和监测提供新的思路,可以快速、大范围地判断祁连山森林的分布规律,为生理监测提供事实依据,另一方面也为森林生物量等指标建模提供了数据来源和精度支撑。
2 研究区和数据
2.1 研究区概况
祁连山地处青藏高原东北边缘,东含乌鞘岭,西至阿尔金山当金山口,北靠河西走廊,南接柴达木盆地北缘,是青藏高原、内蒙古高原和黄土高原的分界线,如图1所示。祁连山地势由东向西逐渐抬升,相对高差3 000 m以上。祁连山区为大陆性高寒半湿润山地气候,年均降水在300 mm以上,主要集中在5~9月,在一些降水集中区,年降水量可达600 mm以上,且由低山向高山,呈现气温递减、雨量递增的趋势,东部温暖湿润,年均温在-2 ℃~0 ℃之间,西部寒冷干燥,年均温在-6 ℃~-8 ℃之间。
图1
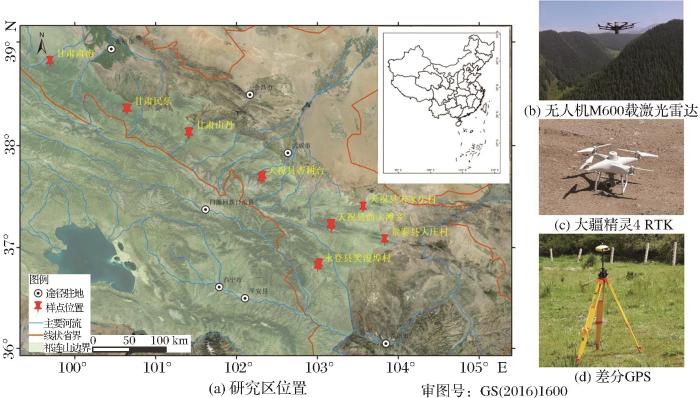
图1
研究区样地分布及使用仪器
Fig.1
Spatial distribution of field measured sample plots and instrumentation
祁连山的植被分布随着气候、土壤和水文等差异也存在地带性分异规律,山地垂直带谱分明,由低海拔到高海拔,依次分布着荒漠、草原、灌丛、森林、高山草甸和冰川冻土。在海拔2 400~3 300 m主要分布着青海云杉、祁连圆柏、鬼箭锦鸡儿和克氏针茅草原等。青海云杉耐寒耐旱,多呈带状、片状分布在祁连山东、中部的阴坡、半阴坡、半阳坡[23],在海拔2 500~3 000 m之间常分布有纯林,在高山地带偶尔与祁连圆柏混交。
2.2 数据获取
2.2.1 样地数据获取
在祁连山东、中部选择15个青海云杉样点,尽量选择人类干扰小的天然林、无病虫害、且均一性好的典型云杉林,设计地面实测方案,如图1所示。每个样点选择2 700 m、2 900 m、3 100 m 3个海拔梯度布设青海云杉样方。样地调查时间为2019年7月20日~8月7日,样方大小为30 m×30 m,记录样地胸径≥5 cm树木的胸径(cm)、基径(cm)、树高(m)、东西冠幅(m)、南北冠幅(m)和枝下高(m)等,通过胸径尺测量树木的胸径、基径,通过激光测距仪测量树高,通过皮尺测量冠幅。
2.2.2 无人机数据获取
在实地样方调查的同时,获取研究区的正射影像和激光雷达数据。
在研究区飞行搭载激光雷达系统的大疆经纬M600 Pro,获取16个样方的激光雷达点云数据,飞行区域为100 m×100 m。激光雷达系统为RIGEL扫描鹰HawkScan HS-300无人机激光扫描测图系统,最大视场角可360°自行调节,最大脉冲发射频率为100 kHz,测距精度为10 mm,测距重复性精度为15 mm,最大测距范围为250 m,激光等级为1 级人眼安全激光,尺寸为243 mm×99 mm×85 mm,重量为1.85 kg,功耗为16 W,使用IMU/GNSS惯性导航单元,平面定位精度为0.05 m,高程定位精度为0.1 m。无人机激光雷达飞行高度在100 m~200 m,飞行速度为4 m/s,样方的平均点云密度为100点/m2。
以DJI Phantom 4 RTK获取的正射影像为辅助数据,确定样方位置并验证激光雷达单木提取结果。Phantom 4 RTK为专业级无人机,传感器是1英寸CMOS,镜头的FOV为84°,曝光时间为1/240,焦距为10 mm,最大光圈为2.97。因起飞条件不同,无人机飞行高度在100 m~400 m之间,飞行区域大小为200 m×200 m,飞行速度为9 m/s,航向、旁向重叠率都在90%以上,地面采样距离小于8 cm/像素。
3 研究方法
3.1 数据预处理
激光雷达点云数据预处理使用两个软件:POSPacUAV for APX-15 UAV和RiPROCESS。具体流程包括:①轨迹处理:POSPAC软件高精度自动化惯导数据解算出精密轨迹,POSPAC能把POS纪录的轨迹信息发送到Trimble RTX服务器,将原始数据和基站数据联合处理,应用提取模型解算出GNSS/惯导紧耦合导航数据、DMI、GAMS等外部数据,通过后处理卡尔曼滤波进行平滑处理,然后送回POSPAC中,生成厘米级精度的综合导航数据;②激光雷达数据解算:在RIPROCESS软件中外接RiWORLD、RiANALYZE等软件,合并POS系统的数据得出包括轨迹、波形分析、地理参考系等结果,将采集到的数据投影到平面坐标上,自动进行检测,然后根据精密轨迹自动配准调整激光点云,全自动提取连接面,可调整点云配准参数包括系统校准信息,以及单次扫描多达6种补偿。③数据拼接:飞行过程中,激光雷达多次扫过同一个点,当飞行方向不同时受风力影响飞机倾斜方向不同,会形成一个夹角,为消除由于误差带来的点云数据错位需要对数据进行拼接。
DJI Phantom 4 RTK获得的样方RGB影像在摄影测量处理软件 Pix4Dmapper 进行处理,分为航摄、成图、特征点提取与匹配、空中三角自动测量和数字正射影像的生成[24]。通过影像拼接生成研究区的全幅影像,作为LiDAR点云单木匹配的辅助验证底图。
3.2 单木参数提取
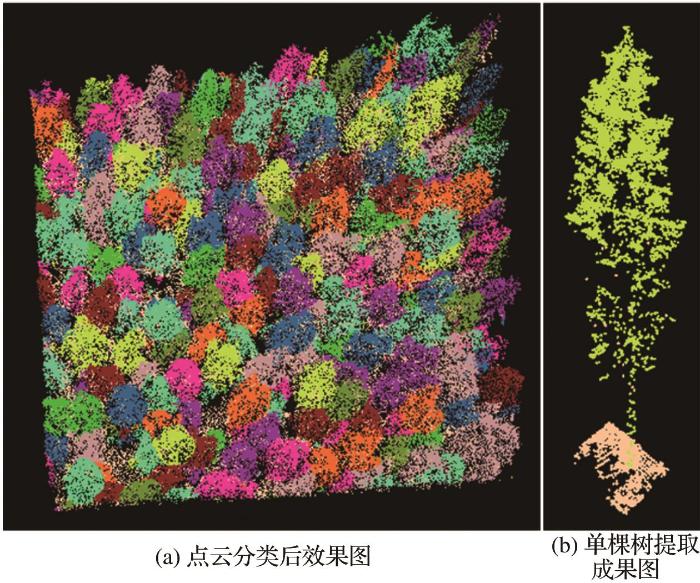
激光雷达点云数据处理和单木参数提取在点云催化剂中实现,具体流程如图2所示。选择合适的参数去除点云中的孤立点,过滤由于测量过程多路径误差和激光测距仪测量误差导致的高程异常值和高程负值。采用点云催化剂中的不规则三角网渐进加密滤波算法分离地面点和非地面点[25],对分离后的每一点云进行平滑处理,剔除地面点中的毛刺点[26]。按点到地面的高度分类,将1~50 m的非地面点判别为树木点。分类后的地面点采用TIN三角网插值生成数字高程模型(Digital Elevation Model,DEM),根据首次回波点生成数字表面模型(Digital Surface Model,DSM),两者的差值就是冠层高度模型(Canopy Height Model,CHM)。
图2
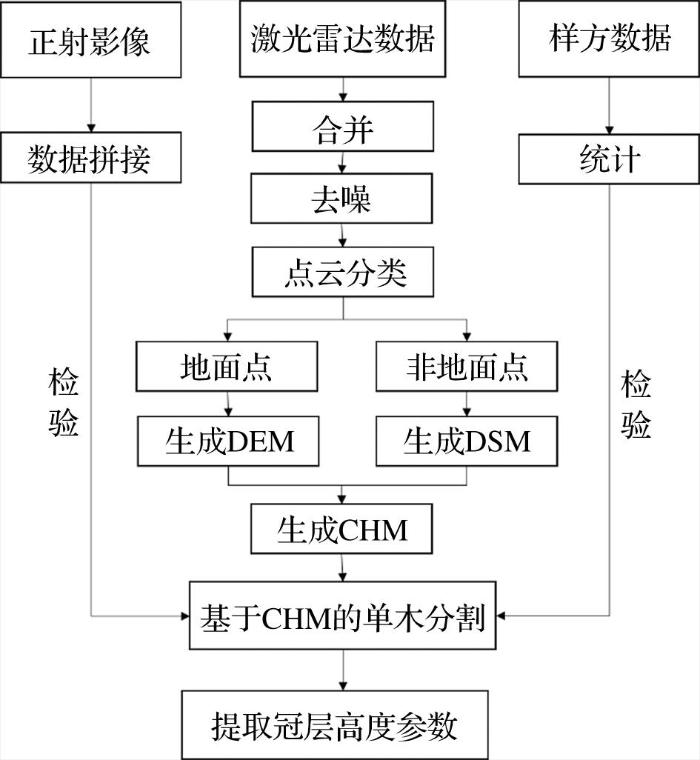
图2
激光雷达点云数据树高提取流程
Fig.2
Flowchart of forest height extraction using LiDAR point cloud data
图3
3.3 点云分类精度验证
利用混淆矩阵评价点云分类效果。混淆矩阵统计样区内数据的分类类别和实际真实类别的差异程度。每一列表示分类获得的结果,每列总数是实验中该类别的个数:而每一行表示实际该类别数据的真实情况,每行总数是实际该类数据的总数。利用混淆矩阵可计算制图精度、用户精度和总体精度。
Kappa 系数常用分类精度评估和一致性检验。Kappa 系数的表达式为:
其中:po为分类正确的样本数除以总的样本数,即分类的总体精度;pe为每类真实样本个数与分类结果中的每类样本个数的乘积之和除以总样本个数的平方。Kappa系数的计算结果通常在0~1之间,当Kappa系数在0.61~0.80之间,表示高度的一致性,而高于0.80,则认为几乎完全一致。
3.4 典型样方单木分割精度评价
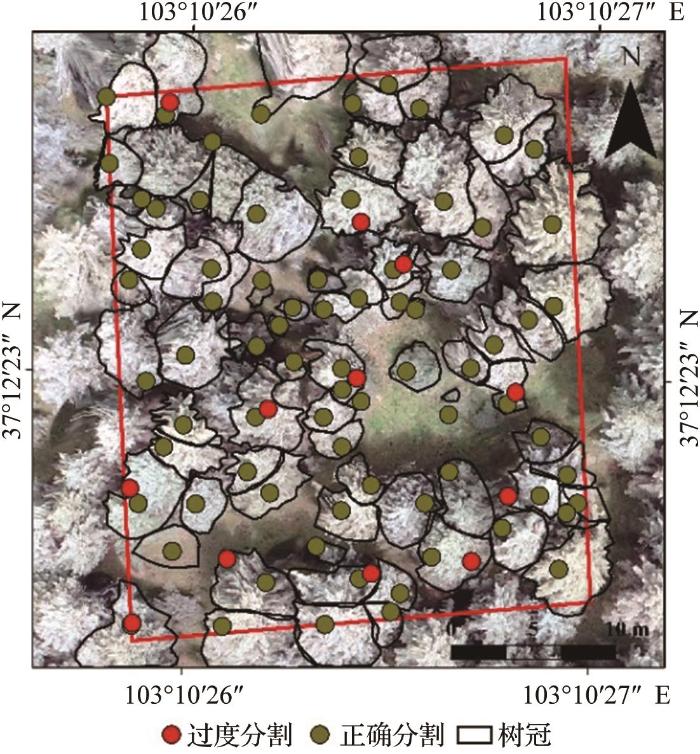
以无人机影像为单木验证底图,评价单木分割结果。单木分割结果分为正确分割,漏分割和过度分割,使用召回率(r)和正确率(p)两个指标评价精度[14]。公式表达为:
其中:r表示召回率,即正确分割占实际数据的比例;p表示正确率,即正确分割占提取数据的比例;Tp表示正确分割的数量;Fn表示漏分割,即点云数据未被检测出的单木;Fp表示过度分割,即点云数据将一棵树分成多个个体。
对于单木参数检验,以样方采集数据为实测值,点云提取树高为估测值,按照
4 结果与讨论
4.1 基于LiDAR数据的青海云杉林树高提取
基于LiDAR数据分割后的树木是绝对坐标,而实测数据获取的是树木的相对位置,难以将分割后的单木与实地样方调查中的每棵树一一对应。因而采用样方水平上的最大值、最小值、平均值、标准差4个统计指标表征样方树木高度特征,从而将实测树木高度与估测的树高联系起来,研究区16个样方的树高统计如图4所示。
图4
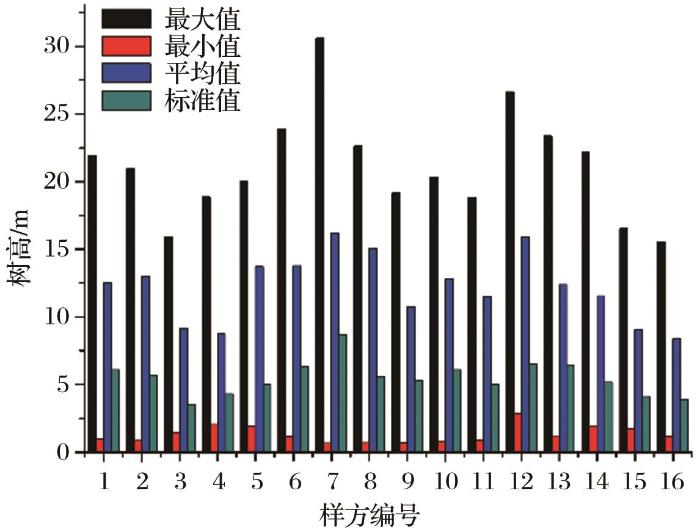
16个样方中,青海云杉树高估测值在0.9~30.6 m之间,高度分布同牛赟等[28]在祁连山样方调查中青海云杉树高范围为1.8~28.6 m基本一致。标准差表征样方内树木间高度差异,这通常是由于树龄导致森林高度不同,而结果表明研究区内森林标准差较小,森林年龄趋于成熟。
不同样方间平均树高(6.05~18.80 m)差异较大,可能与祁连山独特的地理环境有关。因祁连山山脉东高西低,温度、降水在空间上表现出巨大差异,不同地区生长环境不同导致青海云杉树高差异较大。7号、12号样方可能是因为缓坡土壤能够较好地储存水分和营养物质,为树木生长创造了有利条件,从而导致森林高度较高。
4.2 基于无人机激光雷达的精度分析
随机选取6号样方古浪县夏玛林场,利用混淆矩阵分析点云分类结果(表1)。地面点和植被点的用户精度和制图精度都在80%以上,总体精度为95.80%,Kappa系数为0.88。点云分类结果是有效性的,基于不规则三角网渐进加密滤波算法对点云数据进行分类是可行的。地面点的制图精度相对较差,是因为青海云杉分布密集林窗很小,从而导致地面激光点数量不足,造成分类误差。
表1 分类混淆矩阵
Table 1
| 类别 | 地面点 | 植被点 | 合计 | 制图精度 |
|---|---|---|---|---|
| 总体精度 | 95.80% | |||
| 地面点 | 40 637 | 8 150 | 48 787 | 83.29% |
| 植被点 | 1 000 | 168 175 | 169 175 | 99.41% |
| 合计 | 41 637 | 176 325 | 217 962 | |
| 用户精度 | 97.60% | 95.38% | ||
以6号样方古浪县夏玛林场为例,根据
图5
除2号样方外,对有野外数据的15个样方的树高提取精度进行评价,如图6所示。相对于实测数据,平均树高的解释系数最高,为0.93(P<0.05);最大值这个统计指标的估算效果次之,解释系数为0.89(P<0.05);而最小树高和树高标准差的精度较差。单木分割最小树高以1m为界,而野外测量仅统计胸径≥5 cm的树木,导致最小值不一致。
图6
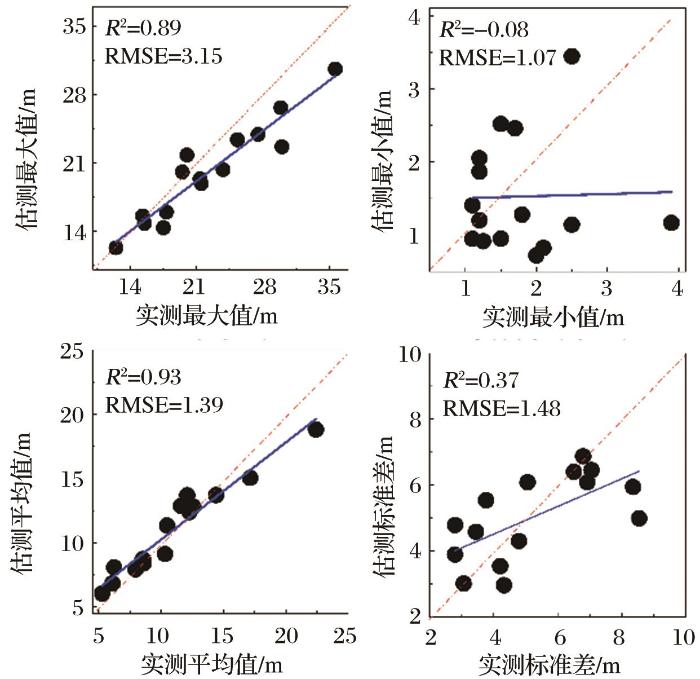
图6
实测树高与估测树高比较
Fig.6
Forest height comparison between ground measured and estimation
以实地采集的15个样方数据作为真实值,根据
图7
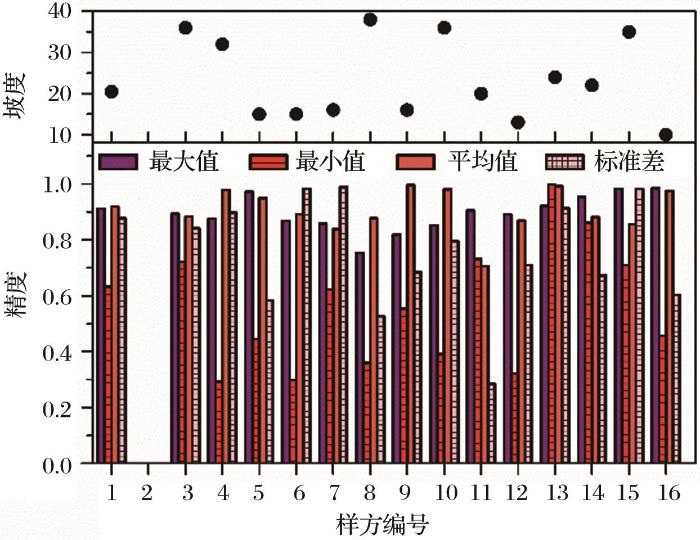
图7
样方树高提取精度评价及坡度分析
Fig.7
Extraction forest height accuracy evaluation from plots and analysis of slope
不同微环境、不同树种、不同飞行条件都会直接影响树高的估测精度。鉴于不同地形对地面点分类的影响,将坡度作为地形指标研究树高提取精度差异原因。地形对山地森林单木树高提取有影响,在坡度较缓的条件下,树高提取精度基本在90% 以上,提取效果较好;在坡度较陡的条件下(如3、8、15号等样方地面坡度不低于34°),提取效果较差,如图7所示。
4.3 祁连山东中部青海云杉冠层高度的空间变化
因平均树高精度较高且能代表树高在样方水平上的变化,利用LiDAR数据提取的平均冠层高度分析其在空间上的变化。受局域生境的影响,青海云杉树高在空间上的分布规律不明显,整体上青海云杉平均冠层高度从东到西呈下降趋势。在祁连山东部,样点平均树高在8.73~16.21 m,而在祁连山中部,样点平均树高在8.4~15.88 m,如图8所示。
图8
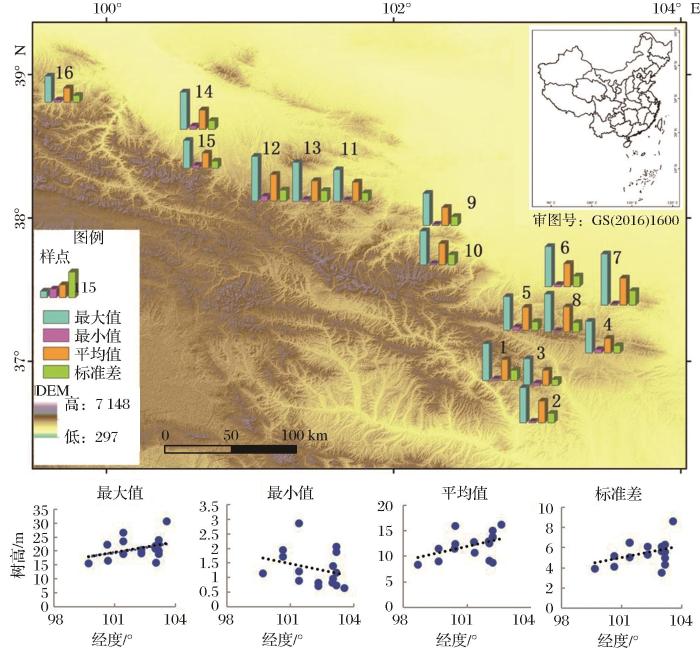
图8
基于不同统计指标的冠层高度空间变化
Fig.8
Spatial variation of canopy height based on different statistical indexes
随着空间上水热条件的不同,祁连山的冠层高度在地域上表现出差异性。在季风的控制下祁连山东部较为温暖,再加上众多山峰发育的冰川河流,水热条件相组合土壤水分含量上升,东部的水热条件相对更适宜森林的生存,而这正是青海云杉生长所必需的因素,因而在空间上平均树高自东向西呈现下降趋势。赵维俊等[31]基于祁连山30个乔木样方发现祁连山青海云杉林树高东段最高,西段最矮,而西段的灌木密度远高于东中段。东段可能是因为此区域青海云杉林生长空间充足,灌丛密度低,从而导致冠层高度较高;而中段青海云杉林密度高,出现矮化现象,水热条件相对较差,因而冠层高度相对东段较矮。
4.4 不同海拔高度青海云杉的冠层高度变化
为消除海拔差异对树木高度空间分布造成的影响,实验选择2 700 m、2 900 m、3 100 m 3个海拔梯度对冠层高度的空间分布进行分析。基于点云的冠层高度与实地样方调查在空间上的变化呈现一致的规律,在同一海拔梯度上,处于海拔2 700 m的云杉平均冠层高度自东向西呈下降趋势,处于海拔2 900 m的云杉平均冠层高度自东向西呈上升趋势,处于海拔3 100 m的云杉平均冠层高度自东向西呈下降趋势,但变化趋势不明显,如图9所示。
图9
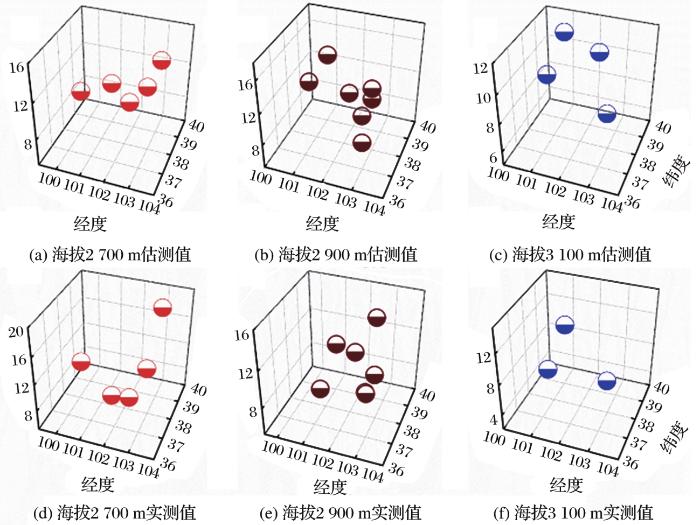
图9
同一海拔高度平均冠层高度的空间变化
Fig.9
Spatial variation of average canopy height at the same altitude
图10
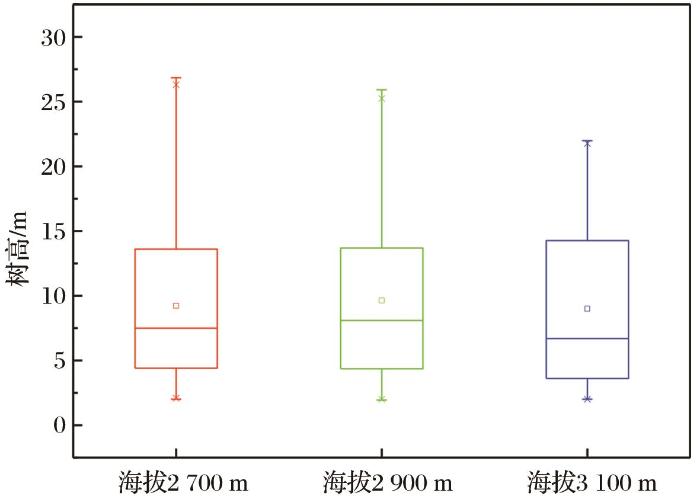
图10
不同海拔梯度上冠层高度变化
Fig.10
Canopy height changes with different elevation gradients
冠层高度中位数在海拔2 900 m出现小峰值可能与林分密度和树木生境有关。相关研究认为,中海拔2 900 m正是林分密度最大的区域,在林分密度大的森林里,树木间竞争激烈,生存空间不足,为了获取更多的生存空间和更多光照,树木会加速生长[35]。随着海拔上升降水增多,土壤含水量上升,干旱条件得到缓解,2 900 m处于中海拔地区,树木生长的水热环境较为适宜。相关研究表明,祁连山区域祁连山北坡立地因子中,对青海云杉树高生长起主导影响作用的因子是腐殖质层厚、石砾含量、CaCO3含量、坡度、坡向;影响作用较小的因子有海拔、年均温、有效土层厚和密度[36]。随着海拔高度的变化,树高变化趋势较为平缓,由此表明海拔对青海云杉树高的影响作用较小,这与他人的研究结果一致,可能主要受土壤、地形和微气候等局域微环境影响,因而森林高度在空间上差异不明显。低海拔区域,树木生长受人类干扰活动较大,在部分样方区内存在放牧现象,树木生长受干扰;在高海拔区域,热量匮缺,在寒冷环境下,树木会将能量用于胸径的增长而非树高[37],同时树木也会通过降低高度减少热量的消耗,树木会出现矮化趋势。
5 结 语
树冠高度可用于林分生物物理属性的估测,对森林资源监测及统计青海云杉林对全球碳汇的贡献具有重要意义。实验基于分水岭算法提取祁连山东、中部青海云杉树高参数,进一步分析祁连山东、中部冠层高度的空间分布变化。结果表明:平均值这一最能反映样方水平的指标估算精度最高,R2为0.93,RMSE为1.39 m;地形对基于点云的树高提取有影响,在坡度较缓的郁闭森林提取树高参数精度较为准确。在空间上,青海云杉平均冠层高度自东向西均呈现下降趋势;同一海拔梯度,海拔2 700 m、3 100 m平均冠层高度自东向西呈下降趋势,海拔2 900 m平均冠层高度自东向西呈上升趋势。随着海拔上升,冠层高度先上升后下降,在海拔2 900 m处中位数达到峰值。
近年来,很多研究关注于激光雷达森林参数反演,但是山地区域树高提取依然存在困难。实验尝试将激光雷达数据与其他影像数据的结合,多源数据协同工作,该方法更准确地验证了山地森林激光雷达的单木结构参数估算精度。复杂的山地地形环境给森林结构参数的建模造成困难,穿透郁闭森林落在地面上的激光点较少,尤其是在陡峭山坡上,地面点分类效果不佳。在祁连山,树种、地形和森林郁闭度等都会带来误差,因而根据坡度校正山区地形,开发更加准确的滤波算法,应用深度学习法建模,真实还原森林结构在空间上的分布,是亟需解决的问题。树木高度是森林生物量模型构建最重要的因素,从长远来看,准确估算森林高度将进一步提高大面域森林生物量、碳储量的估算精度。
参考文献
Attributing the Increase in Atmospheric CO2 to Emitters and Absorbers
[J].
Impact of Disturbance on Community Structure, Biomass and Carbon Stock in Montane Evergreen Forests of Meghalaya, Northeast India
[J].
Biodiversity and Climate Determine the Functioning of Neotropical Forests
[J].
Mapping Multi-layered Mangroves from Multispectral, Hyperspectral, and LiDAR Data
[J].
Retrieval of Forest LAI Using Airborne LVIS and Spaceborne GLAS Waveform LiDAR Data
[J].
基于机载 LVIS 和星载GLAS波形LiDAR数据反演森林LAI
[J].
Research on Forest Key Structural Parameters Estimation based on Airborne LiDAR Data
[J].DOI:10.11947/j.AGCS.2020.20190480 [本文引用: 1]
基于机载LiDAR数据森林关键结构参数估测研究
[J].
Estimating Forest Stand Characteristics in a Coastal Plain Forest Plantation based on Vertical Structure Profile Parameters Derived from ALS Data
[J].
机载激光雷达森林垂直结构剖面参数的沿海平原人工林林分特征反演
[J].
Mangrove Canopy Height Globally Related to Precipitation, Temperature and Cyclone Frequency
[J].
Estimation of Tree Heights and Stand Volume Using an Airborne Lidar System
[J].
Amazon Forest Carbon Dynamics Predicted by Profiles of Canopy Leaf Area and Light Environment
[J].
Quantifying Vegetation and Canopy Structural Complexity from Terrestrial LiDAR Data Using the Forestr R Package
[J].
Tree Height and Diameter Extraction with 3D Reconstruction in a Forest based on TLS
[J].
基于地面激光雷达点云数据的森林树高、胸径自动提取与三维重建
[J].
Mapping Individual Silver Fir Trees Using Hyperspectral and LiDAR Data in a Central European Mixed Forest
[J].
A Study on Typical Forest Biomass Mapping Technology of Great Khingan Using Airborne Laser Scanner Data
[J].
基于激光雷达的大兴安岭典型森林生物量制图技术研究
[J].
UAV-based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring
[J].
Mean Canopy Height Estimation by Combing ZY-3 Data and Airborne LiDAR
[J].
联合资源三号与机载LiDAR的林分平均树高估测
[J].
Tree Species Classification in Urban Forests based on LiDAR Point Cloud Segmentation and Hyperspectral Metrics Extraction
[J].
结合LiDAR单木分割和高光谱特征提取的城市森林树种分类
[J].
Evaluating Spatial Coverage of Data on the Aboveground Biomass in Undisturbed Forests in the Brazilian Amazon
[J].
Forest in Situ Observations Using Unmanned Aerial Vehicle as an Alternative of Terrestrial Measurements
[J].
Assessment of Linear Relationships between TanDEM-X Coherence and Canopy hHight as well as Aboveground Biomass in Rropical Forests
[J].
Factual Approach for Tropical Forest Parameters Measurement and Monitoring: Future Option with a Focus on Synergetic Use of Airborne and Terrestrial LiDAR Technologies
[J].
Comparison of Forest Canopy Height Profiles in a Mountainous Region of Taiwan Derived from Airborne Lidar and Unmanned Aerial Vehicle Imagery
[J].
Spatial and Temporal Variations of Soil Moisture and Temperature of Picea Crassifolia Forest in North Piedmont of Central Qilian Mountains
[J].
祁连山北麓中段青海云杉林土壤水热时空变化特征
[J].
Comparison of Mosaicking Techniques for Airborne Images from Consumer-grade Cameras
[J].
The Research of Improved Progressive Triangulated Irregular Network Densification Filtering Algorithm
[J].
基于不规则三角网的渐进加密滤波算法研究
[J].
An Outlier Eliminatiog Method for Airborne LiDAR Point Cloud Data Using KD-tree
[J].
利用KD-树剔除机载雷达点云粗差的方法研究
[J].
A Classification Method for Segmented Point Clouds in Urban Areas based on Semantic Reasoning
[J].
基于语义推理的城区机载LiDAR分割点云分类
[J].
Analysis on Stand Structure of Picea Crassifolia Forest in Dayekou basin of Qilian mountains
[J].
祁连山大野口流域青海云杉林分结构分析
[J].
Inversion of Forest Height and Canopy Closure Using Airborne LiDAR Data
[J].
基于机载LiDAR数据的林分平均高及郁闭度反演
[J].
Individual Tree DBH and Height Estimation Using Terrestrial Laser Scanning (TLS) in a Subtropical Forest
[J].
基于地基激光雷达的亚热带森林单木胸径与树高提取
[J].
Analysis on Community Structure of Picea crassifolia Forests in the Qilian Mountains
[J].
祁连山青海云杉林群落结构特征分析
[J].
Fractal Properties of Spatial Pattern of Picea crassifolia Population at Different Altitudes
[J].
青海云杉种群分布格局沿海拔梯度分形特征的变化
[J].
Variation of Elevation Gradient for Tree Height and Biomass of Picea crassifolia in Qilian Mountains
[J].
祁连山不同海拔梯度青海云杉树高和生物量变化规律的研究
[J].
Altitudinal Changes in Structure of Middle-aged Picea crassifolia Forests on the Northern Slope of the Qilian Mountains
[J].
祁连山北坡青海云杉中龄林结构随海拔的变化
Growth and Structure Differentiation of Phoebe bournei Plantation with Different Sites and Modes of Afforestation
[J].
不同生境、造林模式闽楠人工林生长及林分分化
[J].
Correlation Analysis of Site Factors and Height Growth of Picea Crassifolia in Qilian Mountains
[J].
祁连山北坡立地因子对青海云杉树高生长的相关分析
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}