1 引 言
数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法。它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统。数据同化的基础是估计理论和控制论[1 ] 。传统的数据同化方法主要分为变分类方法和Kalman滤波类方法。在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] 。针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性。从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] 。然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要。
观测误差协方差在数据同化方法中起着重要作用,它决定赋予模型预测和解决方案中观测值的权重,观测误差矩阵会影响分析值的准确性。数据同化中,为了减少计算复杂度,根据经验通常将观测误差协方差定义为单位对角阵,然而研究表明,在一些特定情况下,观测误差是相关的[11 ,12 ] 且与时间和状态存在依赖性[13 -16 ] 。观测误差通常包括两部分,仪器误差和代表性误差。其中,仪器误差可以根据仪器的使用来校准[17 ] 。代表性误差的处理一直以来是数据同化研究中心的难点。根据2014年欧洲航天局研讨会有关代表性误差术语的讨论,Janjic等[18 ] 给出代表性误差更为统一的定义,将过程中无法解决的尺度问题,模型正演误差或是观测算子带来的误差和预处理数据的误差统一定义为代表性误差。Janjic和Cohn[13 ] 表示由于尺度不匹配造成的观测误差是相关的且与时间状态有依赖性。同时,Swewart[11 ] 和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] 。Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能。
在观测误差估计与处理方面,2005年, Desroziers等[19 ] 介绍了一种用来估计观测误差协方差的方法,称为DBCP诊断,该方法主要利用观测值与背景值和分析值之间的偏差(新息统计)来估计观测误差协方差。2009年,Anderson[22 ] 和Li等[25 ] 利用新息统计方法估计自适应预测协方差矩阵的膨胀系数,来改善预测协方差低估等问题,Bocquet等[23 ] 将该方法用于迭代集合Kalman滤波,Gharamti[24 ] 使用该方法来改善自适应滤波,提高滤波精度,Li等[25 ] 和Miyoshi等[26 ] 将该方法应用于集合转换卡尔曼滤波得到观测误差协方差的估计,在Kalman滤波中,观测误差协方差的粗略估计能够提高状态估计的精度[11 ,21 ,26 ] 。因此,文中考虑将观测误差协方差估计方法与鲁棒滤波方法相结合,使得观测误差协方差与最近的时间和状态相关,来提高状态滤波的精度。
根据观测误差协方差对时间和状态间的依赖性,使用观测误差估计技术来代替经验假定的对角单位阵。利用前一时刻观测值分别与背景值和分析值的偏差来估计观测误差协方差,得到新的观测误差协方差与上一时刻的背景状态值相关,新的观测误差协方差将用于下一次同化。在实验中,观测误差协方差随着同化进程更新,使用估计得到的观测误差协方差来代替单位对角阵,减小观测误差带来的干扰,提高滤波精度。
2 同化方法
数据同化方法将某时刻的观测值y i ∈ R N p x n f ∈ R N m N p N m x i a
x i + 1 = M i + 1 . i ( x i ) + u i
y i + 1 = H i ( x i ) + v i
其中:x i + 1 ∈ R N m i + 1 m M i + 1 , i i m i + 1 H i m p M i + 1 , i H i u i v i
2.1 时间局地化的H ∞
Kalman滤波是将当前观测值与背景值(上一时刻的预测值)结合得到当前时刻预测值的一种方法。传统的Kalman滤波方法假定预先知道模型和观测误差的统计特性,已知模型结构、参数和观测中涉及的不确定性,对观测误差进行量化。为了改进这种限制,Luo和Hoteit[7 ] 将HF中的目标函数用于Kalman滤波中,提出一种新的滤波方法时间局地化滤波。
J x , i H F = x i - x i a S i 2 x i - x i b ( Δ i b ) - 1 2 + ∑ i = 0 N u i Q i - 1 2 + ∑ i = 0 N v i R i - 1 2 (3)
x i - x i a S i 2 ≤ 1 λ i ( x i - x i b ( Δ i b ) - 1 2 + ∑ i = 0 N u i Q i - 1 2 + ∑ i = 0 N v i R i - 1 2 ) (4)
1 λ i > 1 λ i * ≡ i n f x i a s u p x i , u i , v i J x , i H F (5)
其中: 上标a 和b分别表示分析和背景变量,x i - x i b ( Δ i b ) - 1 2 | | u i | | Q i - 1 2 | | v i | | R i - 1 2 Δ i b λ i i Q i R i S i [7 ] 。式(5)是最小最大准则,inf 表示目标函数的下界,sup 表示目标函数的上界[7 ] 。λ * λ [6 ][26 ] 。公式(4)中,当λ i λ i
x i b = M i , i - 1 ( x i - 1 a ) (6)
Δ i b = M i , i - 1 Δ i - 1 a M i , i - 1 T + Q i (7)
其中:x i b Δ i b
x i a = x i b + G i ( y i - H i x i b ) (8)
( Δ i a ) - 1 = ( Δ i b ) - 1 + ( H i ) T ( R i ) - 1 H i - λ i S i (9)
G i = Δ i a ( H i ) T ( R i ) - 1 (10)
其中:符号Δ i P i G i K i [7 ] ,H i x i a Δ i a
( Δ i a ) - 1 = ( Δ i b ) - 1 + ( H i ) T ( R i ) - 1 H i - λ i S i ≥ 0 (11)
其中:满足式(11)表示矩阵是半正定矩阵,其取值与R i λ i S i 公式(5)中λ i [7 ] ,目标函数J x , i H F x i u i v i λ i R i Q i S i R i Q i S i [27 ] 。
2.2 观测空间中的新息统计
Desroziers等[19 ] 提出检验状态空间的各种新息值,随后这种估计方法应用于数据同化领域。该方法主要基于观测、预报、分析之间的不同新息值统计,分别叫做背景新息值:d b = y - H ( x f ) d a = y - H ( x a )
E [ d a ( d b ) T ] ≈ R (12)
数据同化方法中,观测误差协方差主要分为两部分:一是与时间状态无关的观测误差协方差,主要指仪器误差,用ε n I δ D 2 R I = δ D 2 ε n I ε H δ C 2 R H = δ C 2 ε H [28 ] :
R t ≡ R I + R H (13)
实验中,使用SOAR(second-order-autoregressive correlation function)函数构造R H
ε H ( r ) = ( 1 + | r | / L ) e x p ( - | r | / L ) (14)
其中:r L [28 ] 。
估计得到的观测误差协方差用于下一步滤波过程中的Kalman增益,每次同化时Kalman增益值随时间变化,每完成同化一次,观测误差协方差更新一次,迭代计算观测误差协方差函数。在目标函数中使用最新观测误差协方差,对目标函数进行判断,使其分析误差协方差满足条件限制,即为正定矩阵。同时得到满足该情况下的λ i λ i λ i
2.3 集合时间局地化滤波的特殊形式
类似于EnKF方法,将集合的思想运用于EnTLHF(Ensemble Time-Local H-infinity, EnTLHF),提高滤波的鲁棒性和滤波精度[7 ] 。x i b = { x i , j b : x i , j b = M i , i - 1 ( x i - 1 a , j ) , j = 1 , ⋯ n } i n i - 1 x i - 1 a = x i - 1 , j a , j = 1 ⋯ n M i , i - 1
x ¯ i b = m e a n ( x i b ) (16)
Δ i b = C o v ( x i b ) + Q i (17)
其中:x ¯ i b Δ i b
[ p i a , K i ] = E T K F ( X i b , Q i , H i ) (18)
G i = ( I m - λ i P i a S i ) - 1 K i (19)
x ¯ i a = x ¯ i b + G i [ y i - H ( x ¯ i b ) ] (20)
Δ i a = ( I m - λ i P i a S i ) - 1 P i a (21)
( Δ i a ) - 1 = ( P i a ) - 1 - λ i S i ≥ 0 (22)
其中:I m X i b x ¯ i a
在EnTLHF滤波中,观测误差通常由设计者定义,设计者根据经验将观测误差假定为对角阵,对角阵满足距离越远,观测误差的相关性越小,这种假设在观测数较小时有效[17 ] 。然而最新研究表明,观测误差协方差与状态变量相关且与时间变量有一定的依赖性,观测误差的估计与假定会影响预测误差协方差的大小,进而影响观测值在同化时的权重,对同化的精确性和同化的分析值产生影响。所以研究中考虑观测误差协方差估计技术,将观测误差估计技术与鲁棒滤波技术结合研究新的鲁棒滤波方法的鲁棒性。
将观测误差估计技术与鲁棒滤波方法相结合,得到带有观测误差协方差估计的鲁棒滤波方法(Ensemble Time-Local H-infinity with observation error covariance estimation, EnTLHFR)。实验中首先对集合数,背景误差协方差矩阵和观测误差协方差矩阵进行初始化,定义观测误差估计的样本数为同化步数的一半。然后进行EnTLHF算法预报和滤波,每完成一次滤波,使用背景新息值和分析新息值估计该时刻的观测误差协方差,更新的观测误差协方差将用于下一时刻的滤波步骤,代替上一时刻的观测误差协方差。依次迭代计算R i [28 ] 。相关算法如表1 所示。
公式(22)中,当λ > 0 - λ i S i < 0
①当λ i S i = c [ ( Δ i b ) - 1 + ( H i ) T ( R i ) - 1 H i ] = c ( p i a ) - 1 , 0 < c < 1
( Δ i a ) - 1 = ( 1 - c ) ( p i a ) - 1 (23)
这种条件下的放大称为分析协方差方法,标记为EnTLHFR-IANA[6 ] ,c [7 ][27 ] ,此时λ i
②当λ i S i = c ( H i ) T ( R i ) - 1 H i , 0 < c < 1
( Δ i a ) - 1 = ( Δ i b ) - 1 + ( 1 - c ) ( H i ) T ( R i ) - 1 H i (24)
这种方法是基于观测构建的协方差放大法,等同于协方差放大技术,标记为EnTLHFR-IR。
( Δ ̂ i a ) - 1 = ( X i b C i ) - T ( Γ i + I ) ( X i b C i ) - 1 - γ i I m (25)
在ETKF(Ensemble Transform Kalman Filter,ETKF)中,对分析误差协方差矩阵进行特征值分解,得到:
P i a = ( X i b C i ) - T ( Γ i + I ) ( X i b C i ) - 1 C i Γ ( H X b ) T R - 1 H X b Γ = d i a g ( σ i , 1 , σ i , 2 , . . . , σ i , n - 1 ) σ i , j j < l σ i , j ≥ σ i , l σ i , j - ( λ i - 1 ) ≥ 0 ( λ i - 1 ) = c σ i , n - 1 , 0 < c < 1
( Δ ̂ i a ) - 1 = ( X i b C i ) - T ( Γ i - c σ i , n - 1 ) ( X i b C i ) - 1 = ( X i b C i ) - T d i a g ( σ i , 1 - c σ i , n - 1 , ⋯ , ( 1 - c ) σ i , n - 1 ) ( X i b C i ) - 1 (26)
将这种放大称为转移矩阵放大,标记为EnTLHFR-IT,类似于Luo和Hoteit(2001)介绍的放大转移矩阵的特征值[7 ][9 ] 。实验中,每同化一次,估计观测误差协方差得到更新,更新后的观测误差协方差用于下一时刻的滤波,同时判断目标函数是否为正定矩阵,得到满足条件的性能水平系数取值。
3 非线性数值实验
3.1 Lorenz-96高维混沌系统
Lorenz-96模型是由微分方程表示的二阶非线性动力系统,即:
d x n d t = ( x n + 1 - x n - 2 ) x n - 1 - x n + F (27)
其中x N x = x 0 , x - 1 = x N x - 1 , x - 2 = x N x - 2 N x = 40 F y i = H i ( x i ) + v i v i N ( 0 , δ D 2 I )
3.2 性能指标
R M S E = | | X t - X ¯ a | | 2 m (28)
其中:m X t | | • | | 2
实验中为了更加准确评价滤波性能指标,引进另一个性能指标,即同化随时间变化的平均集合散度(Average Ensemble Spread,AES)[29 ] :
A E S i = 1 m ∑ k = 1 m σ i , k 2 (29)
4 数值实验结果及分析
4.1 分析协方差放大实验
4.1.1 改变性能水平系数
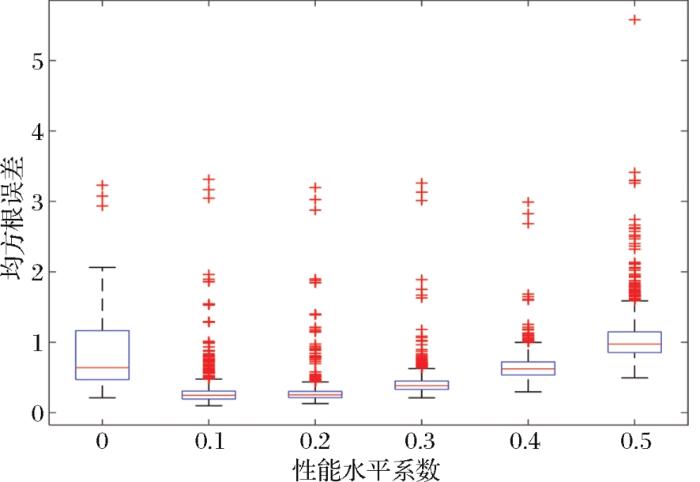
性能水平系数的取值与协方差放大的效果相关,同时性能水平系数的大小反映性能水平γ i 图1 表示带有观测误差估计的鲁棒滤波方法的RMSE随着性能水平系数的变化图。设置参数:F = 5
图1
图1
EnTLHFR随着性能水平系数变化的RMSE
Fig.1
The RMSE of EnTLHFR with the change of performance level coefficient
结果显示:①在分析协方差放大条件下,带有观测误差估计的鲁棒滤波性能水平系数最大值为0.5,当取值为0.5时,估计误差均值出现极大值,说明此时滤波不稳定;②当大于0.5时,滤波发散。滤波中,考虑观测误差的相关性并进行其值估计,能够限制目标函数进而影响性能水平系数的取值。
4.1.2 改变强迫参数
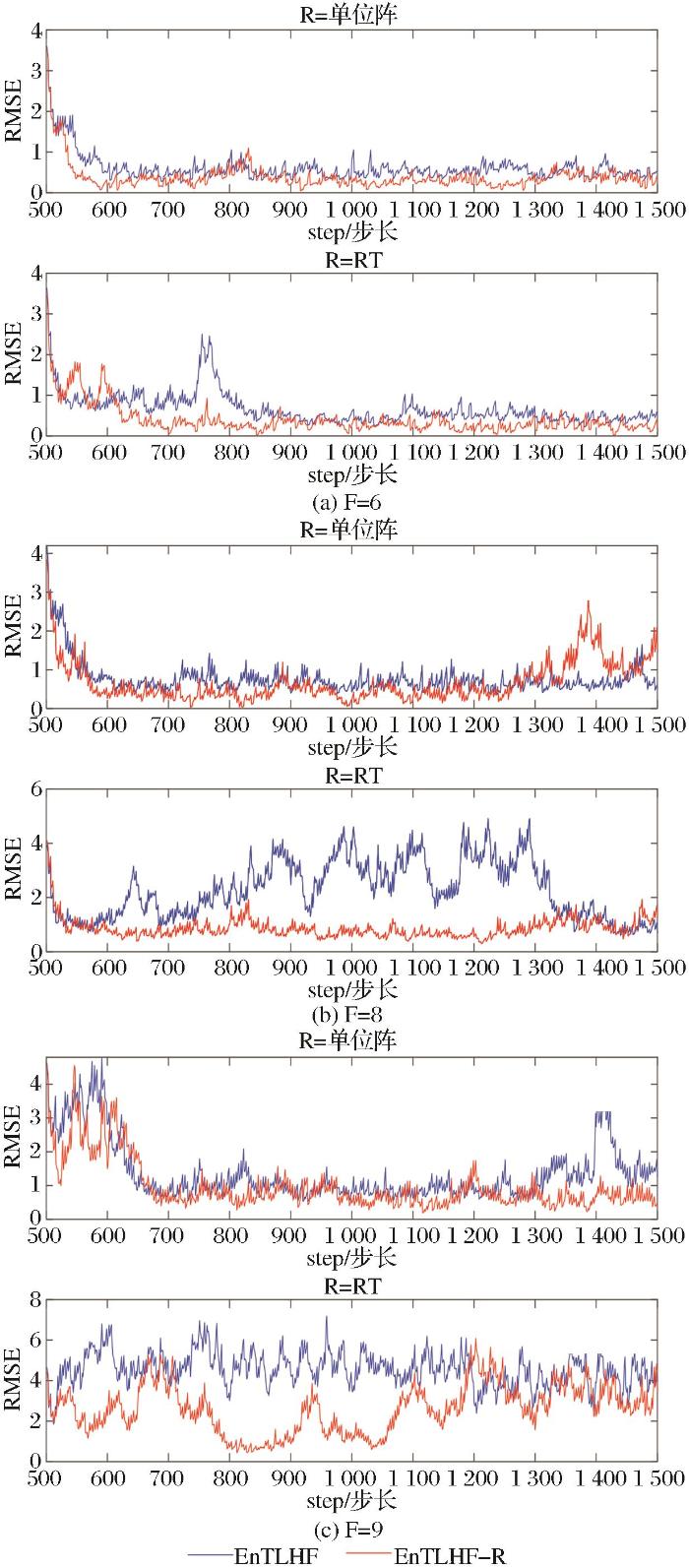
图2 表示在性能水平系数c=0.3,集合数为20,初始观测误差协方差为单位阵和RT,强迫参数F分别为6,8,9时,带有观测误差估计的鲁棒滤波和鲁棒滤波的均方根误差均值(RMSE)变化图。
图2
图2
强迫参数F=6(a),8(b),9(c)时,在分析协方差放大条件下,EnTLHF和EnTLHFR的RMSE均值
Fig.2
When forcing parameter F=6(a),8(b),9(c),under the condition of analysis covariance amplification,the RMSE mean of EnTLHF and EnTLHFR
从图中可以看出:①当初始观测误差为单位阵时,即在同化中只考虑仪器误差,随着同化步长的演进,鲁棒滤波方法的估计误差没有明显的减小。且随着强迫参数的的增加,即模型模拟误差的增大,鲁棒滤波估计误差逐渐增大,带有观测误差估计的鲁棒滤波方法的估计误差略微小于鲁棒滤波的估计误差,此时带有观测误差估计的鲁棒滤波方法的精确性效果不明显。②强迫参数较大时,模型非线性程度较强时,此时两种滤波方法波动较大,说明两种方法稳定性相差不大。③当初始观测误差为RT时,即考虑仪器误差和代表性误差,在整个强迫参数变化时,带有观测误差估计的鲁棒滤波估计误差均小于鲁棒滤波,比较于原鲁棒滤波分析精度更高。总体说明带有观测误差估计的鲁棒滤波方法对不同程度的模型误差具有较好的鲁棒性,证明观测误差协方差的估计可以改善滤波性能。
4.2 分析协方差放大实验(观测角度)
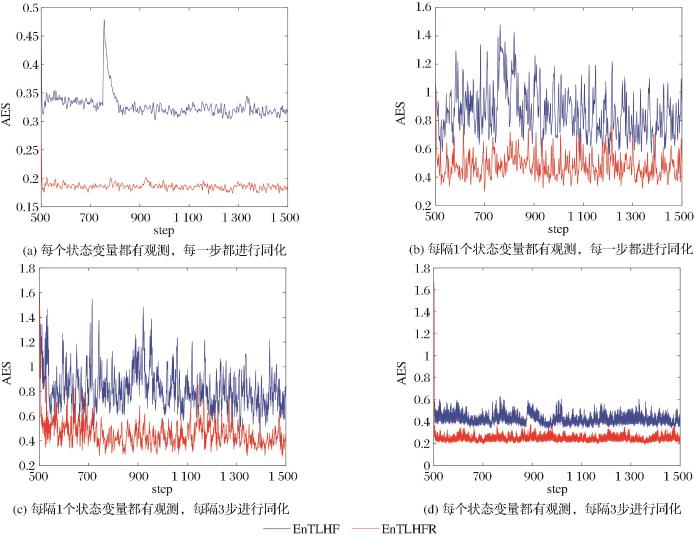
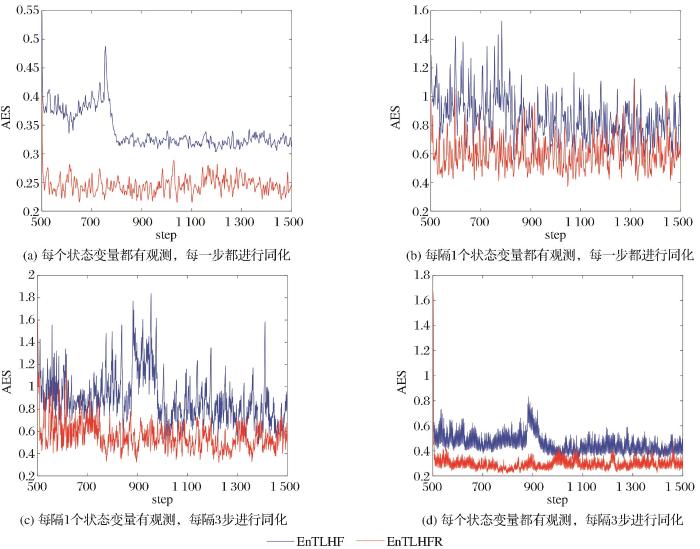
观测数目在同化方法扮演非常重要的作用,有效合理的观测数目能够使估计值更加接近真值,观测数目越多,越能表现当前状态的真实性。图3 和图4 分别表示性能水平系数c=0.3,集合数为20,强迫参数F=6,观测误差协方差为0.1倍单位矩阵和观测误差协方差为RT时,改变同化间隔步长和状态量观测数目的条件下(分为4种情况:每一个状态变量都有观测,每一步都进行同化;每隔一个状态变量有观测,每一步都进行同化;每隔一个状态变量有观测,每隔3步进行同化;每个状态变量都有观测,每隔3步进行同化) EnTLHFR-IR和EnTLHF-IR两种方法的AES(Average Ensemble Spread)随着同化时间的变化。
图3
图3
当观测误差协方差为单位阵时,基于观测角度构建的协方差放大条件下,EnTLHF和EnTLHFR的AES值
Fig.3
The AES of EnTLHF and EnTLHFR under amplification condition of covariance based on observation construction when the observation error covariance is unit matrix
图4
图4
当观测误差协方差为RT时,基于观测构建的协方差放大条件下,EnTLHF和EnTLHFR的AES值
Fig.4
The AES of EnTLHF and EnTLHFR under amplification condition of covariance based on observation construction when the observation error covariance is RT
从图3 和图4 可以看出:①在观测状态数和同化步数变化的4种情况下,当观测误差协方差为单位阵和RT时,EnTLHFR-IR的AES在不同观测条件下都小于EnTLHF-IR的值,说明带有观测误差协方差估计的协方差放大鲁棒滤波的效果更佳;②在观测误差为单位矩阵和RT时,图(a)和图(b)表示每一步都进行同化,图(a)每个状态变量都有观测数,而图(b)只有一半的状态变量有观测数,从图中看出,每个状态变量都有观测的AES小于只有一半状态变量有观测数的AES,带有观测误差协方差估计的鲁棒滤波的AES小于原鲁棒滤波方法的AES,说明带有观测误差估计的鲁棒滤波对观测数目变化具有较好的鲁棒性。③图中(a)和(d),(b)和(c)的观测状态数一样,同化步长分别为1和3,随着同化间隔步数增加鲁棒滤波方法的AES增大,当同化间隔步长增加时,即先验信息的缺失,带有观测误差估计的鲁棒滤波方法的AES波动小于原鲁棒滤波,说明此该滤波收敛程度较优。④图(c)表示只有一半的状态变量有观测数且每隔3步同化一次,这种情况下,带有观测误差估计的鲁棒滤波方法与原鲁棒滤波方法的AES最大。总体来讲,EnTLHFR-IR的AES值偏小,说明在状态变量有无观测及同化间隔步长变化时,带有观测误差估计的鲁棒滤波方法的收敛程度小于原鲁棒滤波方法。
4.3 转移矩阵放大实验
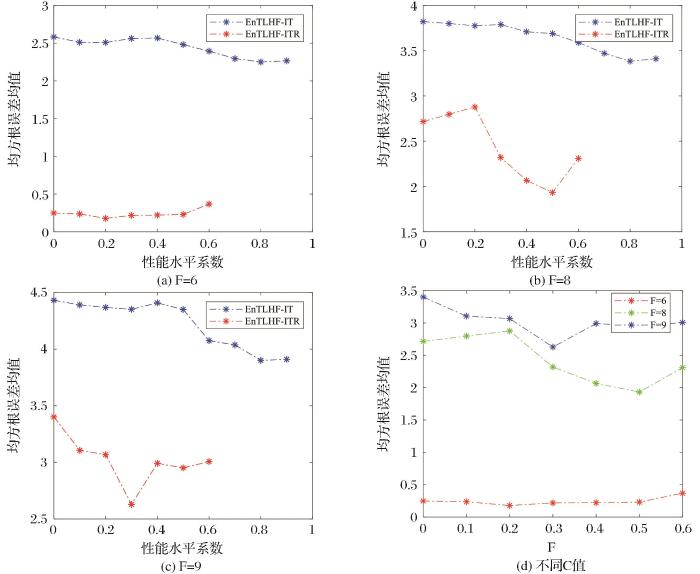
图5 表示矩阵放大实验。实验中,观测误差协方差为0.1倍单位矩阵,集合数为20,强迫参数分别为6、8、9,性能水平系数
图5
图5
强迫参数F=6,8,9及不同的c值下,转移矩阵特征值放大条件下,EnTLHF和EnTLHFR的RMSE时间均值
Fig.5
The time mean RMSE of EnTLHF and EnTLHFR in the inflation condition of transform matrix eigenvalues as PLC changes when the values of the forcing parameter of F are6,8,9
结果显示:①当强迫参数分别为6、8、9,c不为0时,采用放大矩阵的鲁棒滤波的RMSE小于当c等于零的滤波方法(ETKF(Ensemble Transform Kalman Filter)方法),说明鲁棒滤波方法对模型误差具有更优的鲁棒性。②在性能水平系数和强迫参数相同时,带有观测误差估计的鲁棒滤波方法的RMSE值均小于原鲁棒滤波方法。③带有观测误差估计的鲁棒滤波方法在性能水平系数大于0.6时,此时该滤波方法的RMSE会出现突增,说明在该种情况下,即当性能水平系数大于0.6时,该鲁棒滤波方法不收敛,会出现滤波发散。从图(d)中可以看出,当性能水平系数相同时,随着强迫参数F增大,带有观测误差估计的鲁棒滤波方法的估计误差也会增大,当F取值较大时,此时估计误差偏大,进一步验证了带有观测误差估计鲁棒滤波方法放大转移矩阵的有效性和鲁棒性。说明带有观测误差估计的鲁棒滤波方法估计鲁棒稳健性更强。
5 讨 论
将观测误差协方差估计技术与鲁棒滤波技术相结合,分析几种不同角度下带有观测误差估计的鲁棒滤波理论。新方法中,使用观测误差估计技术估计观测误差协方差,在滤波步骤中,使用估计得到的观测误差代替固定的单位对角阵,估计得到的观测误差协方差随状态量的变化而变化。同时,使用估计技术得到的观测误差协方差与最近的时间相关,提高状态分析值的精确性;减小估计误差,提高滤波精度,鲁棒性更好。
6 结 论
利用非线性Lorenz-96系统,将带有观测误差估计技术的鲁棒滤波与鲁棒滤波方法进行比较。首先,在分析放大实验中,通过固定性能水平系数和集合数,改变强迫项参数,考察系统模型对两种方法的鲁棒稳健性影响。结果表明,虽然两种方法的均方根误差随着强迫参数的增大而增大,但带有观测误差协方差估计技术的鲁棒滤波的均方根值始终略小于鲁棒滤波。当强迫参数增大,观测误差为RT,即考虑相关观测误差时,带有观测误差估计的鲁棒滤波的均方根明显小于鲁棒滤波,说明带有观测误差估计的鲁棒滤波对模型误差稳健性更强,提高了滤波精度。其次,通过观测角度来探究两种方法,在其他参数相同的情况下,改变观测数和同化步长来探究两种方法的收敛性,实验结果表明,4种情况下带有观测误差估计的鲁棒滤波的AES均小于鲁棒滤波,并且在整个同化过程中波动较小,即观测误差估计技术降低了误差扰动,能够提高滤波精度,新方法鲁棒性能较好。最后,利用转移矩阵放大法来观察新方法的鲁棒性能,实验结果表明,当性能水平系数不同时,新方法的均方根均小于鲁棒滤波,新方法中性能水平系数的最大值为0.6,当大于0.6时,会发生滤波发散,新方法的应用提高了状态估计的准确性,改善了滤波性能,稳健性更好。
通过数值实验验证了带有观测误差估计的鲁棒滤波的性能,考虑观测误差的相关性和对时间状态的依赖性,使用估计得到观测误差协方差代替对角阵,得到的新方法鲁棒性更好。后续工作将重点研究估计观测误差协方差的样本数的选择。
参考文献
View Option
[1]
Li Xin Liu Feng Wan Miao Harmonizing models and observations: Data assimilation in Earth system science
[J]. Science China Earth Sciences ,2020 ,50 (9 ):1059 -1068 .
[本文引用: 1]
李新 ,刘丰 ,万苗 模型与观测的和弦:地球系统科学中的数据同化
[J]. 中国科学:地球科学 ,2020 ,50 (9 ):1185 -1194 .
[本文引用: 1]
[2]
Wang D Cai X Optimal estimation of irrigation schedule-an example of quantifying human interferences to hydrologic processes
[J]. Advance in Water Resources ,2007 ,30 :1844 -1857 .
[本文引用: 1]
[3]
Vrugt J A Diks C G H Gupta H V et al Improved treatment of uncertainty in hydrologic modeling: Combining the strengths of global optimization and data assimilation
[J]. Water Resources Research , 2005 , 41 (41 ):143 -148 .
[本文引用: 1]
[4]
Hong Tengteng Hu Shaolin Effect of initial deviation on Kalman filter of state vectors in linear systems
[J]. Acta Automatica Sinica ,2017 ,43 (5 ):789 -794 .
[本文引用: 1]
洪腾腾 , 胡绍林 初值偏差对线性系统状态向量Kalman滤波的影响
[J]. 自动化学报 , 2017 , 43 (5 ): 789 -794 .
[本文引用: 1]
[5]
Simon D Optimal state estimation: Kalman, H-infinity, and nonlinear approaches [M]. New Jersey :John Wiley & Sons . 2006 .
[本文引用: 1]
[6]
Wang D Cai X Robust data assimilation in hydrological modeling a comparison of Kalman and H-infinity filters
[J]. Advances in Water Resources 2008 , 31 (3 ): 455 -472 .
[本文引用: 3]
[7]
Luo X D Hoteit I Robust ensemble filtering and its relation to covariance inflation in the ensemble Kalman filter
[J]. Monthly Weather Review , 2011 , 139 (12 ):3938 -3953 .
[本文引用: 10]
[8]
Triantafyllou G Hoteit I Luo X et al Assessing a robust ensemble-based Kalman filter for efficient ecosystem data assimilation of the Cretan Sea
[J]. Journal of Marine Systems , 2013 , 125 : 90 -100 .
[本文引用: 1]
[9]
Bai Yulong Zhang Zhuanhua Ma Mingfang Ensemble time-local robust filtering method in data assimilation system
[J]. Journal of national university of defense technology ,2018 , 40 (1 ):114 -120 .
[本文引用: 2]
摆玉龙 ,张转花 ,马明芳 数据同化系统中的集合时间局地化鲁棒滤波方法
[J].国防科技大学学报 ,2018 ,40 (1 ):114 -120 .
[本文引用: 2]
[10]
Bai Y L Zhang Z H Zhang Y L et al Inflating transform matrices to mitigate assimilation errors with robust filtering based ensemble Kalman filters
[J]. Atmospheric Science Letters , 2016 , 17 (8 ):470 -478 .
[本文引用: 1]
[11]
Stewart L M Correlated observation errors in data assimilation
[D]. Reading, UK :University of Reading , 2010 .
[本文引用: 3]
[12]
Weston P Progress towards the implementation of correlated observation errors in 4d-var
[R]. Technical report, Met Office, UK . 2010 , Forecasting Research Technical Report 560.
[本文引用: 1]
[13]
Janjic T Cohn S E Treatment of observation error due to unresolved scales in atmospheric data assimilation
[J]. Monthly Weather Review , 2006 , 134 : 2900 -2915 .
[本文引用: 2]
[14]
Bormann N Bauer P Estimates of spatial and inter channel observation-error characteristics for current sounder radiances for numerical weather prediction. I: methods and application to ATOVS data
[J]. Quarterly Journal of the Royal Meteorological Society , 2010 a,136 :1036 -1050 .
[15]
Bormann N Collard A Bauer P Estimates of spatial and inter channel observation-error characteristics for current sounder radiances for numerical weather prediction. II: application to AIRS and IASI data
[J]. Quarterly Journal of the Royal Meteorological Society , 2010 b, 136 : 1051 -1063 .
[16]
Waller J A Dance S L Lawless A S et al Representativity error for temperature and humidity using the Met Office high-resolution model
[J]. Quarterly Journal of the Royal Meteorological Society , 2014 , 140 :1189 -1197 .
[本文引用: 1]
[17]
Waller J A Using Observations at different spatial scales in data assimilation for environmental prediction
[D]. Department of Mathematics and Statistics , University of Reading ,2013 .
[本文引用: 2]
[18]
Janjic T Bormann N Bocquet M et al On the representation error in data assimilation
[J]. Quarterly Journal of the Royal Meteorological Society ,2018 ,144 :1257 –1278 .
[本文引用: 1]
[19]
Desroziers G Berre L Chapnik B et al Diagnosis of observation, background and analysis-error statistics in observation space
[J]. Quarterly Journal of the Royal Meteorological Society , 2005 , 131 : 3385 -3396 .
[本文引用: 3]
[20]
Stewart L M Dance S Nichols N K et al Estimating inter channel observation-error correlations for IASI radiance data in the Met Office system
[J]. Quarterly Journal of the Royal Meteorological Society , 2014 , 140 :1236 -1244 .
[本文引用: 1]
[21]
Healy S B and White A A Use of discrete fourier transforms in the 1D-Var retrieval problem
[J]. Quarterly Journal of the Royal Meteorological Society , 2005 , 131 : 63 -72 .
[本文引用: 2]
[22]
Anderson J L Spatially and temporally varying adaptive covariance inflation for ensemble filters
[J]. Tellus , Series A: Dynamic Meteorology and Oceanography, 2009 , 61 (1 ), 72 –83 .
[本文引用: 1]
[23]
Bocquet M Sakov P Combining inflation-free and iterative ensemble Kalman filters for strongly nonlinear systems
[J]. Nonlinear Processes in Geophysics , 2012 , 19 :383 -399 .
[本文引用: 1]
[24]
El Gharamti M Enhanced adaptive inflation algorithm for ensemble filters
[J]. Monthly Weather Review ,2018 ,146 :623 -640 .
[本文引用: 1]
[25]
Li H Kalnay E Miyoshi T Simultaneous estimation of covariance inflation and observation errors within an ensemble Kalman filter
[J]. Quarterly Journal of the Royal Meteorological Society , 2009 , 128 : 1367 -1386 .
[本文引用: 2]
[26]
Miyoshi T Kalnay E Li H Estimating and including observation-error correlations in data assimilation
[J]. Inverse Problems in Science and Engineering , 2013 , 21 (3 ): 387 -398 .
[本文引用: 3]
[27]
Bai Yulong Zhang Zhuanhua You Yuanhong et al A new data assimilation method based on robust ensemble filter
[J]. Plateau Meteorology , 2017 ,36 (4 ):1052 -1059 .
[本文引用: 2]
摆玉龙 ,张转花 ,尤元红 ,等 一种基于鲁棒集合滤波的资料同化方法
[J].高原气象 ,2017 ,36 (4 ):1052 -1059 .
[本文引用: 2]
[28]
Waller J A Dance S L Lawless A S et al Estimating correlated observation error statistics using an ensemble transform Kalman filter
[J]. Tellus A: Dynamic Meteorology and Oceanography ,2014 ,66 :23294 . DOI:10.3402/tellusa.v66.23294 .
[本文引用: 3]
[29]
Hoteit , Ibrahim , Pham , et al Mitigating observation perturbation sampling errors in the stochastic EnKF
[J]. Monthly Weather Review , 2015 , 143 (7 ): 2918 -2936 .
[本文引用: 1]
模型与观测的和弦:地球系统科学中的数据同化
1
2020
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
模型与观测的和弦:地球系统科学中的数据同化
1
2020
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
Optimal estimation of irrigation schedule-an example of quantifying human interferences to hydrologic processes
1
2007
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
Improved treatment of uncertainty in hydrologic modeling: Combining the strengths of global optimization and data assimilation
1
2005
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
初值偏差对线性系统状态向量Kalman滤波的影响
1
2017
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
初值偏差对线性系统状态向量Kalman滤波的影响
1
2017
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
1
2006
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
Robust data assimilation in hydrological modeling a comparison of Kalman and H-infinity filters
3
2008
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
... 其中: 上标a 和b分别表示分析和背景变量,x i - x i b ( Δ i b ) - 1 2 | | u i | | Q i - 1 2 | | v i | | R i - 1 2 Δ i b λ i i Q i R i S i [7 ] .式(5) 是最小最大准则,inf 表示目标函数的下界,sup 表示目标函数的上界[7 ] .λ * λ [6 ][26 ] .公式(4) 中,当λ i λ i
... 这种条件下的放大称为分析协方差方法,标记为EnTLHFR-IANA[6 ] ,c [7 ][27 ] ,此时λ i
Robust ensemble filtering and its relation to covariance inflation in the ensemble Kalman filter
10
2011
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
... Kalman滤波是将当前观测值与背景值(上一时刻的预测值)结合得到当前时刻预测值的一种方法.传统的Kalman滤波方法假定预先知道模型和观测误差的统计特性,已知模型结构、参数和观测中涉及的不确定性,对观测误差进行量化.为了改进这种限制,Luo和Hoteit[7 ] 将HF中的目标函数用于Kalman滤波中,提出一种新的滤波方法时间局地化滤波. ...
... 在HF中[7 ] 存在目标函数满足下面的不等式: ...
... 其中: 上标a 和b分别表示分析和背景变量,x i - x i b ( Δ i b ) - 1 2 | | u i | | Q i - 1 2 | | v i | | R i - 1 2 Δ i b λ i i Q i R i S i [7 ] .式(5) 是最小最大准则,inf 表示目标函数的下界,sup 表示目标函数的上界[7 ] .λ * λ [6 ][26 ] .公式(4) 中,当λ i λ i
... [7 ].λ * λ [6 ][26 ] .公式(4) 中,当λ i λ i
... 其中:符号Δ i P i G i K i [7 ] ,H i x i a Δ i a
... 其中:满足式(11) 表示矩阵是半正定矩阵,其取值与R i λ i S i 公式(5) 中λ i [7 ] ,目标函数J x , i H F x i u i v i λ i R i Q i S i R i Q i S i [27 ] . ...
... 类似于EnKF方法,将集合的思想运用于EnTLHF(Ensemble Time-Local H-infinity, EnTLHF),提高滤波的鲁棒性和滤波精度[7 ] .x i b = { x i , j b : x i , j b = M i , i - 1 ( x i - 1 a , j ) , j = 1 , ⋯ n } i n i - 1 x i - 1 a = x i - 1 , j a , j = 1 ⋯ n M i , i - 1
... 这种条件下的放大称为分析协方差方法,标记为EnTLHFR-IANA[6 ] ,c [7 ][27 ] ,此时λ i
... 将这种放大称为转移矩阵放大,标记为EnTLHFR-IT,类似于Luo和Hoteit(2001)介绍的放大转移矩阵的特征值[7 ][9 ] .实验中,每同化一次,估计观测误差协方差得到更新,更新后的观测误差协方差用于下一时刻的滤波,同时判断目标函数是否为正定矩阵,得到满足条件的性能水平系数取值. ...
Assessing a robust ensemble-based Kalman filter for efficient ecosystem data assimilation of the Cretan Sea
1
2013
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
数据同化系统中的集合时间局地化鲁棒滤波方法
2
2018
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
... 将这种放大称为转移矩阵放大,标记为EnTLHFR-IT,类似于Luo和Hoteit(2001)介绍的放大转移矩阵的特征值[7 ][9 ] .实验中,每同化一次,估计观测误差协方差得到更新,更新后的观测误差协方差用于下一时刻的滤波,同时判断目标函数是否为正定矩阵,得到满足条件的性能水平系数取值. ...
数据同化系统中的集合时间局地化鲁棒滤波方法
2
2018
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
... 将这种放大称为转移矩阵放大,标记为EnTLHFR-IT,类似于Luo和Hoteit(2001)介绍的放大转移矩阵的特征值[7 ][9 ] .实验中,每同化一次,估计观测误差协方差得到更新,更新后的观测误差协方差用于下一时刻的滤波,同时判断目标函数是否为正定矩阵,得到满足条件的性能水平系数取值. ...
Inflating transform matrices to mitigate assimilation errors with robust filtering based ensemble Kalman filters
1
2016
... 数据同化(Data Assimilation , DA),又称资料同化,是一种源自于大气领域的天气预报方法.它的主要思想是在模型动力框架内,将观测信息不断融合到动力系统中,从而自动调整模型轨迹改进系统状态估计,并且减小误差的预报系统.数据同化的基础是估计理论和控制论[1 ] .传统的数据同化方法主要分为变分类方法和Kalman滤波类方法.在实际应用中,Kalman滤波存在特定的条件限制,一般存在假定的条件与实际状态估计之间的不匹配[2 ] ,如通常假定模型误差和观测误差为零均值高斯白噪声,在实际水文模型和陆面模型中,误差统计特性大都不满足该特性;同时量化和测量模型误差的统计特性难以确定[3 ][4 ] .针对Kalman滤波对模型误差和观测误差的特殊要求,Zames等[5 ] 提出了H ∞ H ∞ [6 ] 系统比较了Kalman滤波与H ∞ [7 ] 将集合的思想应用于时间局地化的H ∞ [8 ] 将基于集合鲁棒卡尔曼滤波应用到生态资料同化中,提高了滤波的精度及鲁棒性.从观测角度优化数据同化方法,摆玉龙等[9 ] 提出放大观测误差协方差矩阵的集合鲁棒滤波,利用分析误差协方差矩阵的逆阵为半正定的条件,放大转移矩阵的特征值,间接地放大分析误差协方差矩阵,避免直接对分析误差协方差矩阵进行复杂的奇异值分解(Singular Value Decomposition, SVD),降低了计算复杂度,提高滤波效率[10 ] .然而,上述研究中的鲁棒类滤波方法都将观测误差假定为单位阵且观测误差不具备相关性,显然不能满足实际同化系统中的需要. ...
Correlated observation errors in data assimilation
3
2010
... 观测误差协方差在数据同化方法中起着重要作用,它决定赋予模型预测和解决方案中观测值的权重,观测误差矩阵会影响分析值的准确性.数据同化中,为了减少计算复杂度,根据经验通常将观测误差协方差定义为单位对角阵,然而研究表明,在一些特定情况下,观测误差是相关的[11 ,12 ] 且与时间和状态存在依赖性[13 -16 ] .观测误差通常包括两部分,仪器误差和代表性误差.其中,仪器误差可以根据仪器的使用来校准[17 ] .代表性误差的处理一直以来是数据同化研究中心的难点.根据2014年欧洲航天局研讨会有关代表性误差术语的讨论,Janjic等[18 ] 给出代表性误差更为统一的定义,将过程中无法解决的尺度问题,模型正演误差或是观测算子带来的误差和预处理数据的误差统一定义为代表性误差.Janjic和Cohn[13 ] 表示由于尺度不匹配造成的观测误差是相关的且与时间状态有依赖性.同时,Swewart[11 ] 和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] .Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能. ...
... [11 ]和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] .Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能. ...
... 在观测误差估计与处理方面,2005年, Desroziers等[19 ] 介绍了一种用来估计观测误差协方差的方法,称为DBCP诊断,该方法主要利用观测值与背景值和分析值之间的偏差(新息统计)来估计观测误差协方差.2009年,Anderson[22 ] 和Li等[25 ] 利用新息统计方法估计自适应预测协方差矩阵的膨胀系数,来改善预测协方差低估等问题,Bocquet等[23 ] 将该方法用于迭代集合Kalman滤波,Gharamti[24 ] 使用该方法来改善自适应滤波,提高滤波精度,Li等[25 ] 和Miyoshi等[26 ] 将该方法应用于集合转换卡尔曼滤波得到观测误差协方差的估计,在Kalman滤波中,观测误差协方差的粗略估计能够提高状态估计的精度[11 ,21 ,26 ] .因此,文中考虑将观测误差协方差估计方法与鲁棒滤波方法相结合,使得观测误差协方差与最近的时间和状态相关,来提高状态滤波的精度. ...
Progress towards the implementation of correlated observation errors in 4d-var
1
2010
... 观测误差协方差在数据同化方法中起着重要作用,它决定赋予模型预测和解决方案中观测值的权重,观测误差矩阵会影响分析值的准确性.数据同化中,为了减少计算复杂度,根据经验通常将观测误差协方差定义为单位对角阵,然而研究表明,在一些特定情况下,观测误差是相关的[11 ,12 ] 且与时间和状态存在依赖性[13 -16 ] .观测误差通常包括两部分,仪器误差和代表性误差.其中,仪器误差可以根据仪器的使用来校准[17 ] .代表性误差的处理一直以来是数据同化研究中心的难点.根据2014年欧洲航天局研讨会有关代表性误差术语的讨论,Janjic等[18 ] 给出代表性误差更为统一的定义,将过程中无法解决的尺度问题,模型正演误差或是观测算子带来的误差和预处理数据的误差统一定义为代表性误差.Janjic和Cohn[13 ] 表示由于尺度不匹配造成的观测误差是相关的且与时间状态有依赖性.同时,Swewart[11 ] 和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] .Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能. ...
Treatment of observation error due to unresolved scales in atmospheric data assimilation
2
2006
... 观测误差协方差在数据同化方法中起着重要作用,它决定赋予模型预测和解决方案中观测值的权重,观测误差矩阵会影响分析值的准确性.数据同化中,为了减少计算复杂度,根据经验通常将观测误差协方差定义为单位对角阵,然而研究表明,在一些特定情况下,观测误差是相关的[11 ,12 ] 且与时间和状态存在依赖性[13 -16 ] .观测误差通常包括两部分,仪器误差和代表性误差.其中,仪器误差可以根据仪器的使用来校准[17 ] .代表性误差的处理一直以来是数据同化研究中心的难点.根据2014年欧洲航天局研讨会有关代表性误差术语的讨论,Janjic等[18 ] 给出代表性误差更为统一的定义,将过程中无法解决的尺度问题,模型正演误差或是观测算子带来的误差和预处理数据的误差统一定义为代表性误差.Janjic和Cohn[13 ] 表示由于尺度不匹配造成的观测误差是相关的且与时间状态有依赖性.同时,Swewart[11 ] 和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] .Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能. ...
... [13 ]表示由于尺度不匹配造成的观测误差是相关的且与时间状态有依赖性.同时,Swewart[11 ] 和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] .Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能. ...
Estimates of spatial and inter channel observation-error characteristics for current sounder radiances for numerical weather prediction. I: methods and application to ATOVS data
0
2010
Estimates of spatial and inter channel observation-error characteristics for current sounder radiances for numerical weather prediction. II: application to AIRS and IASI data
0
2010
Representativity error for temperature and humidity using the Met Office high-resolution model
1
2014
... 观测误差协方差在数据同化方法中起着重要作用,它决定赋予模型预测和解决方案中观测值的权重,观测误差矩阵会影响分析值的准确性.数据同化中,为了减少计算复杂度,根据经验通常将观测误差协方差定义为单位对角阵,然而研究表明,在一些特定情况下,观测误差是相关的[11 ,12 ] 且与时间和状态存在依赖性[13 -16 ] .观测误差通常包括两部分,仪器误差和代表性误差.其中,仪器误差可以根据仪器的使用来校准[17 ] .代表性误差的处理一直以来是数据同化研究中心的难点.根据2014年欧洲航天局研讨会有关代表性误差术语的讨论,Janjic等[18 ] 给出代表性误差更为统一的定义,将过程中无法解决的尺度问题,模型正演误差或是观测算子带来的误差和预处理数据的误差统一定义为代表性误差.Janjic和Cohn[13 ] 表示由于尺度不匹配造成的观测误差是相关的且与时间状态有依赖性.同时,Swewart[11 ] 和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] .Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能. ...
Using Observations at different spatial scales in data assimilation for environmental prediction
2
2013
... 观测误差协方差在数据同化方法中起着重要作用,它决定赋予模型预测和解决方案中观测值的权重,观测误差矩阵会影响分析值的准确性.数据同化中,为了减少计算复杂度,根据经验通常将观测误差协方差定义为单位对角阵,然而研究表明,在一些特定情况下,观测误差是相关的[11 ,12 ] 且与时间和状态存在依赖性[13 -16 ] .观测误差通常包括两部分,仪器误差和代表性误差.其中,仪器误差可以根据仪器的使用来校准[17 ] .代表性误差的处理一直以来是数据同化研究中心的难点.根据2014年欧洲航天局研讨会有关代表性误差术语的讨论,Janjic等[18 ] 给出代表性误差更为统一的定义,将过程中无法解决的尺度问题,模型正演误差或是观测算子带来的误差和预处理数据的误差统一定义为代表性误差.Janjic和Cohn[13 ] 表示由于尺度不匹配造成的观测误差是相关的且与时间状态有依赖性.同时,Swewart[11 ] 和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] .Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能. ...
... 在EnTLHF滤波中,观测误差通常由设计者定义,设计者根据经验将观测误差假定为对角阵,对角阵满足距离越远,观测误差的相关性越小,这种假设在观测数较小时有效[17 ] .然而最新研究表明,观测误差协方差与状态变量相关且与时间变量有一定的依赖性,观测误差的估计与假定会影响预测误差协方差的大小,进而影响观测值在同化时的权重,对同化的精确性和同化的分析值产生影响.所以研究中考虑观测误差协方差估计技术,将观测误差估计技术与鲁棒滤波技术结合研究新的鲁棒滤波方法的鲁棒性. ...
On the representation error in data assimilation
1
2018
... 观测误差协方差在数据同化方法中起着重要作用,它决定赋予模型预测和解决方案中观测值的权重,观测误差矩阵会影响分析值的准确性.数据同化中,为了减少计算复杂度,根据经验通常将观测误差协方差定义为单位对角阵,然而研究表明,在一些特定情况下,观测误差是相关的[11 ,12 ] 且与时间和状态存在依赖性[13 -16 ] .观测误差通常包括两部分,仪器误差和代表性误差.其中,仪器误差可以根据仪器的使用来校准[17 ] .代表性误差的处理一直以来是数据同化研究中心的难点.根据2014年欧洲航天局研讨会有关代表性误差术语的讨论,Janjic等[18 ] 给出代表性误差更为统一的定义,将过程中无法解决的尺度问题,模型正演误差或是观测算子带来的误差和预处理数据的误差统一定义为代表性误差.Janjic和Cohn[13 ] 表示由于尺度不匹配造成的观测误差是相关的且与时间状态有依赖性.同时,Swewart[11 ] 和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] .Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能. ...
Diagnosis of observation, background and analysis-error statistics in observation space
3
2005
... 观测误差协方差在数据同化方法中起着重要作用,它决定赋予模型预测和解决方案中观测值的权重,观测误差矩阵会影响分析值的准确性.数据同化中,为了减少计算复杂度,根据经验通常将观测误差协方差定义为单位对角阵,然而研究表明,在一些特定情况下,观测误差是相关的[11 ,12 ] 且与时间和状态存在依赖性[13 -16 ] .观测误差通常包括两部分,仪器误差和代表性误差.其中,仪器误差可以根据仪器的使用来校准[17 ] .代表性误差的处理一直以来是数据同化研究中心的难点.根据2014年欧洲航天局研讨会有关代表性误差术语的讨论,Janjic等[18 ] 给出代表性误差更为统一的定义,将过程中无法解决的尺度问题,模型正演误差或是观测算子带来的误差和预处理数据的误差统一定义为代表性误差.Janjic和Cohn[13 ] 表示由于尺度不匹配造成的观测误差是相关的且与时间状态有依赖性.同时,Swewart[11 ] 和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] .Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能. ...
... 在观测误差估计与处理方面,2005年, Desroziers等[19 ] 介绍了一种用来估计观测误差协方差的方法,称为DBCP诊断,该方法主要利用观测值与背景值和分析值之间的偏差(新息统计)来估计观测误差协方差.2009年,Anderson[22 ] 和Li等[25 ] 利用新息统计方法估计自适应预测协方差矩阵的膨胀系数,来改善预测协方差低估等问题,Bocquet等[23 ] 将该方法用于迭代集合Kalman滤波,Gharamti[24 ] 使用该方法来改善自适应滤波,提高滤波精度,Li等[25 ] 和Miyoshi等[26 ] 将该方法应用于集合转换卡尔曼滤波得到观测误差协方差的估计,在Kalman滤波中,观测误差协方差的粗略估计能够提高状态估计的精度[11 ,21 ,26 ] .因此,文中考虑将观测误差协方差估计方法与鲁棒滤波方法相结合,使得观测误差协方差与最近的时间和状态相关,来提高状态滤波的精度. ...
... Desroziers等[19 ] 提出检验状态空间的各种新息值,随后这种估计方法应用于数据同化领域.该方法主要基于观测、预报、分析之间的不同新息值统计,分别叫做背景新息值:d b = y - H ( x f ) d a = y - H ( x a ) . 当系统满足线性和高斯条件时,此时系统进行无偏预测和观测,对背景新息值和分析新息值求期望得到观测误差协方差估计值,公式如下: ...
Estimating inter channel observation-error correlations for IASI radiance data in the Met Office system
1
2014
... 观测误差协方差在数据同化方法中起着重要作用,它决定赋予模型预测和解决方案中观测值的权重,观测误差矩阵会影响分析值的准确性.数据同化中,为了减少计算复杂度,根据经验通常将观测误差协方差定义为单位对角阵,然而研究表明,在一些特定情况下,观测误差是相关的[11 ,12 ] 且与时间和状态存在依赖性[13 -16 ] .观测误差通常包括两部分,仪器误差和代表性误差.其中,仪器误差可以根据仪器的使用来校准[17 ] .代表性误差的处理一直以来是数据同化研究中心的难点.根据2014年欧洲航天局研讨会有关代表性误差术语的讨论,Janjic等[18 ] 给出代表性误差更为统一的定义,将过程中无法解决的尺度问题,模型正演误差或是观测算子带来的误差和预处理数据的误差统一定义为代表性误差.Janjic和Cohn[13 ] 表示由于尺度不匹配造成的观测误差是相关的且与时间状态有依赖性.同时,Swewart[11 ] 和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] .Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能. ...
Use of discrete fourier transforms in the 1D-Var retrieval problem
2
2005
... 观测误差协方差在数据同化方法中起着重要作用,它决定赋予模型预测和解决方案中观测值的权重,观测误差矩阵会影响分析值的准确性.数据同化中,为了减少计算复杂度,根据经验通常将观测误差协方差定义为单位对角阵,然而研究表明,在一些特定情况下,观测误差是相关的[11 ,12 ] 且与时间和状态存在依赖性[13 -16 ] .观测误差通常包括两部分,仪器误差和代表性误差.其中,仪器误差可以根据仪器的使用来校准[17 ] .代表性误差的处理一直以来是数据同化研究中心的难点.根据2014年欧洲航天局研讨会有关代表性误差术语的讨论,Janjic等[18 ] 给出代表性误差更为统一的定义,将过程中无法解决的尺度问题,模型正演误差或是观测算子带来的误差和预处理数据的误差统一定义为代表性误差.Janjic和Cohn[13 ] 表示由于尺度不匹配造成的观测误差是相关的且与时间状态有依赖性.同时,Swewart[11 ] 和Desroziers等[19 ] 认为,在同化中考虑这些相关的观测误差时,可以得到更准确的分析值[20 ] .Healy等[21 ] 也证明粗略的估计观测误差协方差矩阵能提高估计性能. ...
... 在观测误差估计与处理方面,2005年, Desroziers等[19 ] 介绍了一种用来估计观测误差协方差的方法,称为DBCP诊断,该方法主要利用观测值与背景值和分析值之间的偏差(新息统计)来估计观测误差协方差.2009年,Anderson[22 ] 和Li等[25 ] 利用新息统计方法估计自适应预测协方差矩阵的膨胀系数,来改善预测协方差低估等问题,Bocquet等[23 ] 将该方法用于迭代集合Kalman滤波,Gharamti[24 ] 使用该方法来改善自适应滤波,提高滤波精度,Li等[25 ] 和Miyoshi等[26 ] 将该方法应用于集合转换卡尔曼滤波得到观测误差协方差的估计,在Kalman滤波中,观测误差协方差的粗略估计能够提高状态估计的精度[11 ,21 ,26 ] .因此,文中考虑将观测误差协方差估计方法与鲁棒滤波方法相结合,使得观测误差协方差与最近的时间和状态相关,来提高状态滤波的精度. ...
Spatially and temporally varying adaptive covariance inflation for ensemble filters
1
2009
... 在观测误差估计与处理方面,2005年, Desroziers等[19 ] 介绍了一种用来估计观测误差协方差的方法,称为DBCP诊断,该方法主要利用观测值与背景值和分析值之间的偏差(新息统计)来估计观测误差协方差.2009年,Anderson[22 ] 和Li等[25 ] 利用新息统计方法估计自适应预测协方差矩阵的膨胀系数,来改善预测协方差低估等问题,Bocquet等[23 ] 将该方法用于迭代集合Kalman滤波,Gharamti[24 ] 使用该方法来改善自适应滤波,提高滤波精度,Li等[25 ] 和Miyoshi等[26 ] 将该方法应用于集合转换卡尔曼滤波得到观测误差协方差的估计,在Kalman滤波中,观测误差协方差的粗略估计能够提高状态估计的精度[11 ,21 ,26 ] .因此,文中考虑将观测误差协方差估计方法与鲁棒滤波方法相结合,使得观测误差协方差与最近的时间和状态相关,来提高状态滤波的精度. ...
Combining inflation-free and iterative ensemble Kalman filters for strongly nonlinear systems
1
2012
... 在观测误差估计与处理方面,2005年, Desroziers等[19 ] 介绍了一种用来估计观测误差协方差的方法,称为DBCP诊断,该方法主要利用观测值与背景值和分析值之间的偏差(新息统计)来估计观测误差协方差.2009年,Anderson[22 ] 和Li等[25 ] 利用新息统计方法估计自适应预测协方差矩阵的膨胀系数,来改善预测协方差低估等问题,Bocquet等[23 ] 将该方法用于迭代集合Kalman滤波,Gharamti[24 ] 使用该方法来改善自适应滤波,提高滤波精度,Li等[25 ] 和Miyoshi等[26 ] 将该方法应用于集合转换卡尔曼滤波得到观测误差协方差的估计,在Kalman滤波中,观测误差协方差的粗略估计能够提高状态估计的精度[11 ,21 ,26 ] .因此,文中考虑将观测误差协方差估计方法与鲁棒滤波方法相结合,使得观测误差协方差与最近的时间和状态相关,来提高状态滤波的精度. ...
Enhanced adaptive inflation algorithm for ensemble filters
1
2018
... 在观测误差估计与处理方面,2005年, Desroziers等[19 ] 介绍了一种用来估计观测误差协方差的方法,称为DBCP诊断,该方法主要利用观测值与背景值和分析值之间的偏差(新息统计)来估计观测误差协方差.2009年,Anderson[22 ] 和Li等[25 ] 利用新息统计方法估计自适应预测协方差矩阵的膨胀系数,来改善预测协方差低估等问题,Bocquet等[23 ] 将该方法用于迭代集合Kalman滤波,Gharamti[24 ] 使用该方法来改善自适应滤波,提高滤波精度,Li等[25 ] 和Miyoshi等[26 ] 将该方法应用于集合转换卡尔曼滤波得到观测误差协方差的估计,在Kalman滤波中,观测误差协方差的粗略估计能够提高状态估计的精度[11 ,21 ,26 ] .因此,文中考虑将观测误差协方差估计方法与鲁棒滤波方法相结合,使得观测误差协方差与最近的时间和状态相关,来提高状态滤波的精度. ...
Simultaneous estimation of covariance inflation and observation errors within an ensemble Kalman filter
2
2009
... 在观测误差估计与处理方面,2005年, Desroziers等[19 ] 介绍了一种用来估计观测误差协方差的方法,称为DBCP诊断,该方法主要利用观测值与背景值和分析值之间的偏差(新息统计)来估计观测误差协方差.2009年,Anderson[22 ] 和Li等[25 ] 利用新息统计方法估计自适应预测协方差矩阵的膨胀系数,来改善预测协方差低估等问题,Bocquet等[23 ] 将该方法用于迭代集合Kalman滤波,Gharamti[24 ] 使用该方法来改善自适应滤波,提高滤波精度,Li等[25 ] 和Miyoshi等[26 ] 将该方法应用于集合转换卡尔曼滤波得到观测误差协方差的估计,在Kalman滤波中,观测误差协方差的粗略估计能够提高状态估计的精度[11 ,21 ,26 ] .因此,文中考虑将观测误差协方差估计方法与鲁棒滤波方法相结合,使得观测误差协方差与最近的时间和状态相关,来提高状态滤波的精度. ...
... [25 ]和Miyoshi等[26 ] 将该方法应用于集合转换卡尔曼滤波得到观测误差协方差的估计,在Kalman滤波中,观测误差协方差的粗略估计能够提高状态估计的精度[11 ,21 ,26 ] .因此,文中考虑将观测误差协方差估计方法与鲁棒滤波方法相结合,使得观测误差协方差与最近的时间和状态相关,来提高状态滤波的精度. ...
Estimating and including observation-error correlations in data assimilation
3
2013
... 在观测误差估计与处理方面,2005年, Desroziers等[19 ] 介绍了一种用来估计观测误差协方差的方法,称为DBCP诊断,该方法主要利用观测值与背景值和分析值之间的偏差(新息统计)来估计观测误差协方差.2009年,Anderson[22 ] 和Li等[25 ] 利用新息统计方法估计自适应预测协方差矩阵的膨胀系数,来改善预测协方差低估等问题,Bocquet等[23 ] 将该方法用于迭代集合Kalman滤波,Gharamti[24 ] 使用该方法来改善自适应滤波,提高滤波精度,Li等[25 ] 和Miyoshi等[26 ] 将该方法应用于集合转换卡尔曼滤波得到观测误差协方差的估计,在Kalman滤波中,观测误差协方差的粗略估计能够提高状态估计的精度[11 ,21 ,26 ] .因此,文中考虑将观测误差协方差估计方法与鲁棒滤波方法相结合,使得观测误差协方差与最近的时间和状态相关,来提高状态滤波的精度. ...
... ,26 ].因此,文中考虑将观测误差协方差估计方法与鲁棒滤波方法相结合,使得观测误差协方差与最近的时间和状态相关,来提高状态滤波的精度. ...
... 其中: 上标a 和b分别表示分析和背景变量,x i - x i b ( Δ i b ) - 1 2 | | u i | | Q i - 1 2 | | v i | | R i - 1 2 Δ i b λ i i Q i R i S i [7 ] .式(5) 是最小最大准则,inf 表示目标函数的下界,sup 表示目标函数的上界[7 ] .λ * λ [6 ][26 ] .公式(4) 中,当λ i λ i
一种基于鲁棒集合滤波的资料同化方法
2
2017
... 其中:满足式(11) 表示矩阵是半正定矩阵,其取值与R i λ i S i 公式(5) 中λ i [7 ] ,目标函数J x , i H F x i u i v i λ i R i Q i S i R i Q i S i [27 ] . ...
... 这种条件下的放大称为分析协方差方法,标记为EnTLHFR-IANA[6 ] ,c [7 ][27 ] ,此时λ i
一种基于鲁棒集合滤波的资料同化方法
2
2017
... 其中:满足式(11) 表示矩阵是半正定矩阵,其取值与R i λ i S i 公式(5) 中λ i [7 ] ,目标函数J x , i H F x i u i v i λ i R i Q i S i R i Q i S i [27 ] . ...
... 这种条件下的放大称为分析协方差方法,标记为EnTLHFR-IANA[6 ] ,c [7 ][27 ] ,此时λ i
Estimating correlated observation error statistics using an ensemble transform Kalman filter
3
2014
... 数据同化方法中,观测误差协方差主要分为两部分:一是与时间状态无关的观测误差协方差,主要指仪器误差,用ε n I δ D 2 R I = δ D 2 ε n I ε H δ C 2 R H = δ C 2 ε H [28 ] : ...
... 其中:r L [28 ] . ...
... 将观测误差估计技术与鲁棒滤波方法相结合,得到带有观测误差协方差估计的鲁棒滤波方法(Ensemble Time-Local H-infinity with observation error covariance estimation, EnTLHFR).实验中首先对集合数,背景误差协方差矩阵和观测误差协方差矩阵进行初始化,定义观测误差估计的样本数为同化步数的一半.然后进行EnTLHF算法预报和滤波,每完成一次滤波,使用背景新息值和分析新息值估计该时刻的观测误差协方差,更新的观测误差协方差将用于下一时刻的滤波步骤,代替上一时刻的观测误差协方差.依次迭代计算R i [28 ] .相关算法如表1 所示. ...
Mitigating observation perturbation sampling errors in the stochastic EnKF
1
2015
... 实验中为了更加准确评价滤波性能指标,引进另一个性能指标,即同化随时间变化的平均集合散度(Average Ensemble Spread,AES)[29 ] : ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}