1 引 言
机载LiDAR(Light Detection And Ranging)系统不仅可快速获取地物目标高精度、高密度的三维空间信息,而且能够穿透植被冠层,获取林下地表特征信息,非常有利于输电通道三维信息获取。在电力巡检中,机载LiDAR可提高传统人工手段巡检效率低、解决光学数据缺乏三维信息[1 ] 和植被遮挡导致的输电通道地形“盲区”等问题,通过对点云数据后处理和地物要素三维数字化重建,可准确获取其中电力线和杆塔的状态、进行危险点分析、安全预警和数字化管理等[2 ] 。
输电通道点云分类是实现线路安全分析和三维重建等应用的基础工作,其目的是从原始点云中提取电力线、杆塔、植被以及建筑等关键要素点云,平均分类精度应不低于80%,尤其关注电力线和杆塔等主体要素的识别和提取[3 ] ,分类精度应在85%以上。常用的分类算法可分为基于语义规则的点云分类和基于机器学习的点云分类[4 ] ,前者根据各类地物的空间分布特点设定一系列规则,如高程阈值、线性约束、空间位置关系约束等,逐一提取各要素。电力线提取主要依赖于线性特征检测,如霍夫变换(Hough Transform, HT)、随机采样一致性(Random Sample And Consensus, RANSAC)线性拟合等[5 ] 。杆塔提取主要根据其空间拓扑特性、密度特征等定位其空间位置,进而实现杆塔精确提取[6 ] 。基于语义规则的点云分类方法对于地物要素空间分布的规律性要求极高,依赖于多种约束条件和参数阈值,而输电通道地形复杂多变,杆塔类型多样,地形、点云密度和杆塔类型变化以及点云缺失等都会造成该方法在应用中缺乏高抗噪性和泛化性,难以适应业务应用的需求。根据特征提取方式的不同,基于机器学习的点云分类算法可分为基于传统机器学习和基于深度学习方法,目前主流的方法通常根据目标地物特点定义并提取特征,构建多维特征向量、输入分类器进行训练,进而构建分类模型并提取测试集特征,最后输入至分类模型完成分类。根据计算特征时所使用的基元可将该方法分为两类,即基于点的特征和基于对象的特征[7 ] 。基于传统机器学习的方法根据输入的特征自动寻找合适阈值进行分类,自动化程度较高,但算法精度与特征的有效性密切相关。目前应用中主要特征大多为手工设计,需要根据丰富的先验知识来定义,而且特征的适用性和有效性也难以保证。
深度学习可以从数据中自动学习特征而不再依赖于人工设计,广泛应用于图像处理领域。传统的深度学习模型要求输入的数据具有规则的结构(如图像可被视为一种由像素组成的规则矩阵),而点云具有非结构化、无序性、离散性,无法直接输入传统的二维深度学习模型。近年来,很多学者不断深化深度学习技术并将其用于三维计算机视觉,并提出了多种点云规则化方法,将离散点云转换为规则格式,如图像、三维体素等[8 -9 ] 。基于点的深度学习方法可直接将原始点云作为输入,充分保留了点的三维信息[10 -11 ] 。以上分类算法在公开的室内场景数据集取得了较好的分类效果,但对于复杂的室外场景如Semantic 3D数据集仍有较大的精度提升空间[12 ] 。输电通道作为一种复杂且重要的室外场景,其点云数据存在典型的类别不均衡性,点云分类精度和效率对机载LiDAR电力巡检业务化有重要意义[13 ] 。
基于经典的PointNet++模型,结合样本加权处理,开展输电通道点云分类研究,并与随机森林(Random Forest, RF)分类算法进行比较,说明本文方法的精度和效率。
2 研究方法
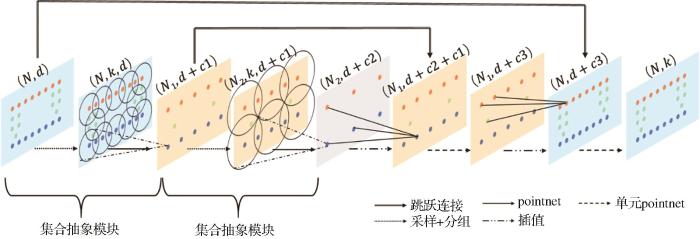
基于样本加权PointNet++的点云分类方法由经典PointNet++模型(图1 )和样本加权处理组成,前者包含分层点集特征学习和点特征传播:输入原始点云数据、通过分层点集特征学习提取不同分辨率点特征,再经过点特征传播获取所有原始点的特征,最后通过softmax层得到每个点属于各个类别的得分。
图1
图1
PointNet++点云分类网络架构[10 ]
Fig.1
PointNet++ architecture for point cloud classification[10 ]
2.1 分层点集特征学习
该方法由多个集合抽象模块(Set Abstraction)组成,其作用是将输入的点云分成多个局部点集并提取每个点集的全局特征,然后使特征不断抽象,从而获取更高维的特征,主要包含以下3个基本单元:①采样层。采用迭代最远点采样算法(Farthest Point Sampling, FPS)完成局部区域质心集的构建[14 ] 。首先随机选取一个点作为初始点,然后选择离这个点距离最远的点,将该点加入质心集中,并作为起点继续迭代,直至选取的质心个数满足给定个数N ' N ×(d +C ),其中N 为输入的点数目,d 为点的坐标维数(通常为3),C 为其他属性维度,如强度、回波等。以采样层选取的质心点为圆心,根据预先设定的搜索半径r 获取球邻域内所有点,输出得到N’ 个局部点云,其大小为k ×d ,k 为每个局部区域点云数目。③PointNet层。该层学习每个局部区域点云的全局特征,即抽象区域点云的整体性特征。输入数据是分组层获取的多组局部点集,其尺寸为N ’ × k × d C ' N ’ × d + C '
2.2 点特征传播
分层点集特征学习对点云进行下采样操作,仅保留每个点集抽象模块中的质心点,而场景分类问题需要给原始点赋予对应的类别标签,因此需要将点集恢复为原始数据。当分层特征的尺寸为N l × d + C ' N l - 1 N l - 1 × C l - 1 + C '
2.3 样本加权
在一般输电通道场景中,植被和地面点几乎占获取的点云数据量的90%以上,可视作“多数类”,电力线和杆塔点云所占的比重较小,可视作“少数类”。这种类别间样本数差异较大的现象是分类任务中典型的类别数据不均衡问题,在应用监督学习分类方法时会存在一定的局限性[3 ] ,如模型会趋向于学习多数类的正确分类,而不会重视样本较少的类别。电力线和杆塔是输电通道最为关键的地物,但通常点密度低、样本较少,若直接使用类别不均衡的样本数据构建训练模型和分类,其分类精度会受到影响。本实验采用加权处理,以降低其对少数类分类精度的影响。
原始PointNet++网络采用的损失函数为交叉熵损失函数L 0 式(1)),为反映点云数目占比差异对分类精度的影响,将L 0 L 式(2)),该函数可根据类别的总点数占比修改其权重,从而增加分错少数类的成本。
L 0 = - ∑ i K ( y i l o g p i ) (1)
L = - ∑ i K ( w i y i l o g p i ) (2)
其中:y i p i i 的概率;K 代表类别数目;w i
(2)利用式(3)计算各类别点数占训练集总点数的比重p e r i s u m
p e r i = t i m e i s u m (3)
(3)对数函数能够有效的控制增长率,防止类别间差别大而导致权重过大的问题,因此采用式(4)计算每个类别的权重w i
w i = 1 l o g ( t + p e r i ) (4)
其中:t > 1 t 的参数范围(如间隔为0.1时,t 的参数列表为:1.1, 1.2, 1.3…),选择精度最高时参数t 的值作为最优参数,并将此时的模型作为最终模型进行测试。
3 结果与分析
3.1 实验数据
实验数据为江苏省某区域500 kV线路的机载LiDAR扫描数据,地形复杂度较低、起伏较小,点密度约50 pts/m2 。使用19档(两个杆塔之间为1档)带标签的点云数据作为原始数据集,覆盖范围约6 959 m(线路长度)×90 m(通道宽),其中用于训练和验证的比例为8∶2。使用2档不带标签的数据作为测试集,测试集1的范围为317 m×90 m,测试集2的范围为658 m×90 m,后者相较于前者档距更大、所处环境更为复杂,一定程度可反映算法在不同数据量和复杂场景中的稳定性。实验将目标地物确定为输电通道的主要组成部分,包括地面、植被、杆塔、电力线以及建筑。训练集和测试集的类别数目统计情况如表1 所示。
3.2 评价指标
总体分类精度(Overall Accuracy, OA)是多类别分类问题中常用的指标,但易受样本分布不均衡的影响,尤其是样本数目较少的类别。为了更科学地评估本文算法对各类别的分类效果,引入精确率(pre)、召回率(rec)和F1值(F1)作为评价指标,其中TP代表作出正确判断的正样本,FN代表作出错误判断的正样本,FP代表作出错误判断的负样本。精确率指标表示所有被预测为正的样本中实际为正的样本的概率,召回率表示在实际为正的样本中被预测为正样本的概率,F1值兼顾了精确率和召回率,是这两种指标的调和平均值。引入平均精确率(P)、平均召回率(R)、平均F1值(F)作为整体的评价指标,三者分别为所有类精确率、召回率和F1值的算术平均值,计算方法如式(5)~(7):
p r e = T P T P + F P P = 1 n ∑ i n p r e i (5)
r e c = T P T P + F N R = 1 n ∑ i n r e c i (6)
F 1 = 2 × p r e × r e c p r e + r e c F = 1 n ∑ i n F 1 i (7)
3.3 结果分析
所有实验均在一台服务器上完成,配置为:Intel(R) Xeon(R) CPU E5-2603 v3 @ 1.60 GHz,显卡为NVIDIA Tesla K40c、Tesla K40 m,256 G内存。在训练过程中,设置初始学习率为0.01,每迭代4 080次降为原来的0.7倍,学习动量为0.9,批处理大小为16。随机森林算法使用的特征包括基于特征值、纵剖面、密度和高度的特征[15 ] 。
样本加权PointNet++算法分类评价见表2 。可以看出,两个测试集的F1值均在85%以上,植被、电力线、杆塔的分类结果较好,其中电力线类别的F1值高于95%,杆塔类别的F1值均高于85%。地面类别分类结果有待改进,Test1中有近1/3的地面点被错分为植被点,Test2中有584 492个植被点被错分为地面点,导致植被类别的召回率明显低于Test1,且建筑的精确率较低,仅65.43%,相较于Test1下降了18.59%,原因在于Test2的地形起伏更为明显,导致坡面上的部分地面点被错分为建筑物点。
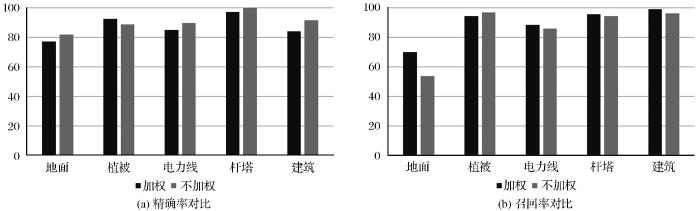
为减少类别不平衡对分类结果的影响,采用加权交叉熵损失作为损失函数,并以Test1为例,比较加权前后各类别的分类精度(图2 )。结果表明,样本加权后,除植被外各类别的精确率都有所下降,而召回率均上升,地面类别的召回率上升尤为明显,说明样本加权处理在损失一定精确率的前提下提升了各类别的召回率。总体而言,样本加权后算法优于未加权的结果。
图2
图2
Test1样本加权前后结果对比
Fig.2
Comparison of the results before and after sample weight in Test1
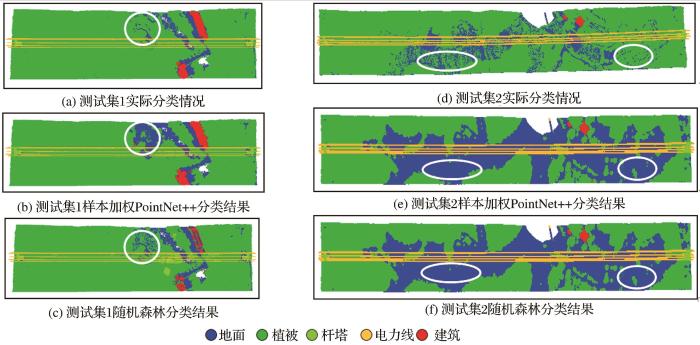
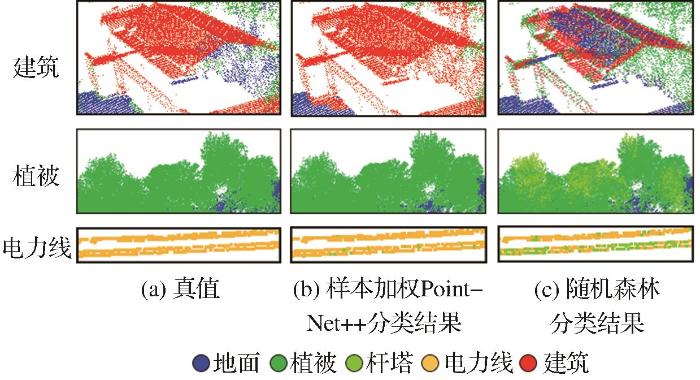
随机森林算法是目前输电通道点云分类中较为常用的算法[16 ] ,本实验从精度和效率两方面与之进行比较。图3 是采用两种算法对两个测试数据集的分类结果,其中白色框为算法错分较严重的区域。可以看出,随机森林算法对植被的分类结果优于PointNet++方法,一定程度上可分出低植被点和地面点。图4 表明,随机森林算法在建筑类别的分类效果远不如PointNet++方法,与地面点、植被混淆严重;在提取杆塔类别时,也出现了较多的漏分和错分,杆塔点多与植被和电力线点混淆。
图3
图3
两种算法在两个测试集的分类结果
Fig.3
Classification results of test set 1 and 2 by using different classification algorithms
图4
图4
两种算法分类结果对比
Fig.4
Comparison of classification results
表3 对比了两类算法的性能。总体来说,样本加权PointNet++算法的分类效果优于随机森林算法,F值分别提升了13.07%和9.22%;在区分建筑和杆塔方面,样本加权PointNet++算法的性能更优。分类效率方面,随机森林算法总耗时远大于样本加权PointNet++,主要在于该算法不能直接处理原始点云数据,需要先提取特征,分类模型构建用时是样本加权PointNet++分类模型的6.4倍,对测试集1的分类耗时约为样本加权PointNet++的53倍。另外,随机森林算法的时间复杂度更高,测试集2的点数相对于测试集1增加了0.6倍,随机森林算法耗时增加了约1倍,而样本加权PointNet++算法耗时只增加了约0.5倍,一定程度上说明样本加权PointNet++算法效率高,能快速分类大数据量的点云,更适合于大规模输电通道地物分类。
4 结 论
实验探讨了样本加权PointNet++模型在输电通道机载LiDAR点云分类中的有效性,分析了样本加权处理对模型分类的影响,并从分类精度和效率两方面与目前常用的随机森林分类算法进行了对比,表明样本加权后,整体分类精度有所提升,但精确率略有下降;样本加权PointNet++算法的分类精度优于随机森林,F值平均87.14%,而且耗时少,能快速分类大数据量的点云,更适合于大规模输电通道点云分类。同时,样本加权操作具有通用性,可适用于其他网络结构,用于减少因类别不均衡造成的精度损失。
研究中采用的实验数据覆盖的研究区相对平坦,地形起伏小,对于复杂和起伏较大的地形,因没有获取到相应的数据,暂未开展算法的应用和评价。另外目前基于深度学习的点云分类研究还处于起步阶段,对于不同生产应用需求,网络架构还需要进一步的改进和优化。在输电通道机载LiDAR点云数据中,地面和植被点云占比非常大,而基于样本加权PointNet++算法进行分类时,地面点和低植被点混淆较为严重。因此,在未来工作中可以考虑结合经典地面滤波算法,如渐进三角网滤波、布料模拟滤波(Cloth Simulation Filter, CSF)等,先去除地面点后再用样本加权PointNet++进行分类,进一步提高分类的精度和效率。
参考文献
View Option
[1]
Du Yuefei Liu Zhengjun Feng Tianwen Application of PPP technology and Airborne LiDAR in power line inspection
[J]. Remote Sensing Technology and Application , 2019 , 34 (2 ): 263 -268 .
[本文引用: 1]
杜跃飞 , 刘正军 , 冯天文 PPP技术与机载激光雷达在电力线巡检中的应用研究
[J]. 遥感技术与应用 , 2019 , 34 (2 ): 263 -268 .
[本文引用: 1]
[2]
Guo Tao Shen Ping Shi Lei et al Study on power tower extraction and fast positioning from Airborne LiDAR data
[J]. Remote Sensing Technology and Application , 2018 , 33 (3 ): 530 -535 .
[本文引用: 1]
虢韬 , 沈平 , 时磊 , 等 机载LiDAR快速定位高压电塔方法研究
[J]. 遥感技术与应用 , 2018 , 33 (3 ): 530 -535 .
[本文引用: 1]
[3]
Li W. Luo Z. Xiao Z. et al A GCN-based method for extracting power lines and pylons from Airborne LiDAR data
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2022 ,60 :1 -14 . DOI: 10.1109/TGRS.2021.3076107 .
[本文引用: 2]
[4]
Tan J Zhao H Yang R et al An entropy-weighting method for efficient power-line feature evaluation and extraction from LiDAR point clouds
[J]. Remote Sensing ,2021 ,13 (17 ):3446 . DOI: 10.3390/rs13173446 .
[本文引用: 1]
[5]
Wang Pinghua Xi Xiaohuan Wang Cheng et al Study on power line fast extraction based on Airborne LiDAR data
[J]. Science of Surveying and Mapping , 2017 , 42 (2 ): 154 -158 .
[本文引用: 1]
王平华 , 习晓环 , 王成 , 等 机载激光雷达数据中电力线的快速提取
[J]. 测绘科学 , 2017 , 42 (2 ): 154 -158 .
[本文引用: 1]
[6]
Chen S Wang C Dai H et al Power pylon reconstruction based on abstract template structures using Airborne LiDAR data
[J]. Remote Sensing ,2019 ,11 (13 ):1579 . DOI:10.3390/rs11131579 .
[本文引用: 1]
[7]
Zhang Jixian Lin Xiangguo Liang Xinlian Research progress and prospect of point cloud information extraction
[J]. Acta Geodaetica et Cartographica Sinica , 2017 , 46 (10 ):262 -271 .
[本文引用: 1]
张继贤 , 林祥国 , 梁欣廉 点云信息提取研究进展和展望
[J]. 测绘学报 , 2017 , 46 (10 ): 262 -271 .
[本文引用: 1]
[8]
Su H Maji S Kalogerakis E et al Multi-view convolutional neural networks for 3D shape recognition
[C]∥ International Conference on Computer Vision ,Santiago,Chile ,13 -16 .
[本文引用: 1]
[本文引用: 1]
[9]
Qi C Su H Matthias N et al Volumetric and multi-view CNNS for object classification on 3D data
[C]∥ IEEE Conference on Computer Vision and Pattern Recognition , Las Vegas, USA , 27 -30 .
[本文引用: 1]
[本文引用: 1]
[10]
Qi C Li Y Su H et al Pointnet++: Deep hierarchical feature learning on point sets in a metric space
[C]∥ Neural Information Processing Systems , Long Beach, USA , 3 -9 .
[本文引用: 3]
[本文引用: 3]
[11]
Li Y Bu R Sun M et al PointCNN: convolution on x-transformed points
[C]∥Neural Information Processing Systems , Montreal, Canada , 3 -8
[本文引用: 1]
[本文引用: 1]
[12]
Hackel T Savinov N Ladicky L et al Semantic3D.net: a new large-scale point cloud classification benchmark
[J]. ISPRS Annals of Photogrammetry , Remote Sensing and Spatial Information Sciences, 2017 , IV-1/W1 : 91 -98 .
[本文引用: 1]
[13]
Huang Y Du Y Shi W Fast and accurate power line corridor survey using spatial line clustering of point cloud
[J]. Remote Sensing ,2021 ,13 (8 ):1571 . DOI:10.3390/rs13081571 .
[本文引用: 1]
[14]
Kamousi P Lazard S Maheshwari A et al Analysis of farthest point sampling for approximating geodesics in a graph
[J]. Computational Geometry ,2016 ,57 :1 -7 . DOI:10.1016/j.comge 0.2016.05.005 .
[本文引用: 1]
[15]
Kim H B Sohn G Point-based classification of power line corridor scene using random forests
[J]. Photogrammetric Engineering & Remote Sensing , 2013 , 79 (9 ):821 -833 .
[本文引用: 1]
[16]
Peng S Xi X Wang C et al Systematic comparison of power corridor classification methods from ALS point clouds
[J]. Remote Sensing ,2019 ,11 (17 ):1961 . DOI:10.3390/rs11171961 .
[本文引用: 1]
PPP技术与机载激光雷达在电力线巡检中的应用研究
1
2019
... 机载LiDAR(Light Detection And Ranging)系统不仅可快速获取地物目标高精度、高密度的三维空间信息,而且能够穿透植被冠层,获取林下地表特征信息,非常有利于输电通道三维信息获取.在电力巡检中,机载LiDAR可提高传统人工手段巡检效率低、解决光学数据缺乏三维信息[1 ] 和植被遮挡导致的输电通道地形“盲区”等问题,通过对点云数据后处理和地物要素三维数字化重建,可准确获取其中电力线和杆塔的状态、进行危险点分析、安全预警和数字化管理等[2 ] . ...
PPP技术与机载激光雷达在电力线巡检中的应用研究
1
2019
... 机载LiDAR(Light Detection And Ranging)系统不仅可快速获取地物目标高精度、高密度的三维空间信息,而且能够穿透植被冠层,获取林下地表特征信息,非常有利于输电通道三维信息获取.在电力巡检中,机载LiDAR可提高传统人工手段巡检效率低、解决光学数据缺乏三维信息[1 ] 和植被遮挡导致的输电通道地形“盲区”等问题,通过对点云数据后处理和地物要素三维数字化重建,可准确获取其中电力线和杆塔的状态、进行危险点分析、安全预警和数字化管理等[2 ] . ...
机载LiDAR快速定位高压电塔方法研究
1
2018
... 机载LiDAR(Light Detection And Ranging)系统不仅可快速获取地物目标高精度、高密度的三维空间信息,而且能够穿透植被冠层,获取林下地表特征信息,非常有利于输电通道三维信息获取.在电力巡检中,机载LiDAR可提高传统人工手段巡检效率低、解决光学数据缺乏三维信息[1 ] 和植被遮挡导致的输电通道地形“盲区”等问题,通过对点云数据后处理和地物要素三维数字化重建,可准确获取其中电力线和杆塔的状态、进行危险点分析、安全预警和数字化管理等[2 ] . ...
机载LiDAR快速定位高压电塔方法研究
1
2018
... 机载LiDAR(Light Detection And Ranging)系统不仅可快速获取地物目标高精度、高密度的三维空间信息,而且能够穿透植被冠层,获取林下地表特征信息,非常有利于输电通道三维信息获取.在电力巡检中,机载LiDAR可提高传统人工手段巡检效率低、解决光学数据缺乏三维信息[1 ] 和植被遮挡导致的输电通道地形“盲区”等问题,通过对点云数据后处理和地物要素三维数字化重建,可准确获取其中电力线和杆塔的状态、进行危险点分析、安全预警和数字化管理等[2 ] . ...
A GCN-based method for extracting power lines and pylons from Airborne LiDAR data
2
2022
... 输电通道点云分类是实现线路安全分析和三维重建等应用的基础工作,其目的是从原始点云中提取电力线、杆塔、植被以及建筑等关键要素点云,平均分类精度应不低于80%,尤其关注电力线和杆塔等主体要素的识别和提取[3 ] ,分类精度应在85%以上.常用的分类算法可分为基于语义规则的点云分类和基于机器学习的点云分类[4 ] ,前者根据各类地物的空间分布特点设定一系列规则,如高程阈值、线性约束、空间位置关系约束等,逐一提取各要素.电力线提取主要依赖于线性特征检测,如霍夫变换(Hough Transform, HT)、随机采样一致性(Random Sample And Consensus, RANSAC)线性拟合等[5 ] .杆塔提取主要根据其空间拓扑特性、密度特征等定位其空间位置,进而实现杆塔精确提取[6 ] .基于语义规则的点云分类方法对于地物要素空间分布的规律性要求极高,依赖于多种约束条件和参数阈值,而输电通道地形复杂多变,杆塔类型多样,地形、点云密度和杆塔类型变化以及点云缺失等都会造成该方法在应用中缺乏高抗噪性和泛化性,难以适应业务应用的需求.根据特征提取方式的不同,基于机器学习的点云分类算法可分为基于传统机器学习和基于深度学习方法,目前主流的方法通常根据目标地物特点定义并提取特征,构建多维特征向量、输入分类器进行训练,进而构建分类模型并提取测试集特征,最后输入至分类模型完成分类.根据计算特征时所使用的基元可将该方法分为两类,即基于点的特征和基于对象的特征[7 ] .基于传统机器学习的方法根据输入的特征自动寻找合适阈值进行分类,自动化程度较高,但算法精度与特征的有效性密切相关.目前应用中主要特征大多为手工设计,需要根据丰富的先验知识来定义,而且特征的适用性和有效性也难以保证. ...
... 在一般输电通道场景中,植被和地面点几乎占获取的点云数据量的90%以上,可视作“多数类”,电力线和杆塔点云所占的比重较小,可视作“少数类”.这种类别间样本数差异较大的现象是分类任务中典型的类别数据不均衡问题,在应用监督学习分类方法时会存在一定的局限性[3 ] ,如模型会趋向于学习多数类的正确分类,而不会重视样本较少的类别.电力线和杆塔是输电通道最为关键的地物,但通常点密度低、样本较少,若直接使用类别不均衡的样本数据构建训练模型和分类,其分类精度会受到影响.本实验采用加权处理,以降低其对少数类分类精度的影响. ...
An entropy-weighting method for efficient power-line feature evaluation and extraction from LiDAR point clouds
1
2021
... 输电通道点云分类是实现线路安全分析和三维重建等应用的基础工作,其目的是从原始点云中提取电力线、杆塔、植被以及建筑等关键要素点云,平均分类精度应不低于80%,尤其关注电力线和杆塔等主体要素的识别和提取[3 ] ,分类精度应在85%以上.常用的分类算法可分为基于语义规则的点云分类和基于机器学习的点云分类[4 ] ,前者根据各类地物的空间分布特点设定一系列规则,如高程阈值、线性约束、空间位置关系约束等,逐一提取各要素.电力线提取主要依赖于线性特征检测,如霍夫变换(Hough Transform, HT)、随机采样一致性(Random Sample And Consensus, RANSAC)线性拟合等[5 ] .杆塔提取主要根据其空间拓扑特性、密度特征等定位其空间位置,进而实现杆塔精确提取[6 ] .基于语义规则的点云分类方法对于地物要素空间分布的规律性要求极高,依赖于多种约束条件和参数阈值,而输电通道地形复杂多变,杆塔类型多样,地形、点云密度和杆塔类型变化以及点云缺失等都会造成该方法在应用中缺乏高抗噪性和泛化性,难以适应业务应用的需求.根据特征提取方式的不同,基于机器学习的点云分类算法可分为基于传统机器学习和基于深度学习方法,目前主流的方法通常根据目标地物特点定义并提取特征,构建多维特征向量、输入分类器进行训练,进而构建分类模型并提取测试集特征,最后输入至分类模型完成分类.根据计算特征时所使用的基元可将该方法分为两类,即基于点的特征和基于对象的特征[7 ] .基于传统机器学习的方法根据输入的特征自动寻找合适阈值进行分类,自动化程度较高,但算法精度与特征的有效性密切相关.目前应用中主要特征大多为手工设计,需要根据丰富的先验知识来定义,而且特征的适用性和有效性也难以保证. ...
机载激光雷达数据中电力线的快速提取
1
2017
... 输电通道点云分类是实现线路安全分析和三维重建等应用的基础工作,其目的是从原始点云中提取电力线、杆塔、植被以及建筑等关键要素点云,平均分类精度应不低于80%,尤其关注电力线和杆塔等主体要素的识别和提取[3 ] ,分类精度应在85%以上.常用的分类算法可分为基于语义规则的点云分类和基于机器学习的点云分类[4 ] ,前者根据各类地物的空间分布特点设定一系列规则,如高程阈值、线性约束、空间位置关系约束等,逐一提取各要素.电力线提取主要依赖于线性特征检测,如霍夫变换(Hough Transform, HT)、随机采样一致性(Random Sample And Consensus, RANSAC)线性拟合等[5 ] .杆塔提取主要根据其空间拓扑特性、密度特征等定位其空间位置,进而实现杆塔精确提取[6 ] .基于语义规则的点云分类方法对于地物要素空间分布的规律性要求极高,依赖于多种约束条件和参数阈值,而输电通道地形复杂多变,杆塔类型多样,地形、点云密度和杆塔类型变化以及点云缺失等都会造成该方法在应用中缺乏高抗噪性和泛化性,难以适应业务应用的需求.根据特征提取方式的不同,基于机器学习的点云分类算法可分为基于传统机器学习和基于深度学习方法,目前主流的方法通常根据目标地物特点定义并提取特征,构建多维特征向量、输入分类器进行训练,进而构建分类模型并提取测试集特征,最后输入至分类模型完成分类.根据计算特征时所使用的基元可将该方法分为两类,即基于点的特征和基于对象的特征[7 ] .基于传统机器学习的方法根据输入的特征自动寻找合适阈值进行分类,自动化程度较高,但算法精度与特征的有效性密切相关.目前应用中主要特征大多为手工设计,需要根据丰富的先验知识来定义,而且特征的适用性和有效性也难以保证. ...
机载激光雷达数据中电力线的快速提取
1
2017
... 输电通道点云分类是实现线路安全分析和三维重建等应用的基础工作,其目的是从原始点云中提取电力线、杆塔、植被以及建筑等关键要素点云,平均分类精度应不低于80%,尤其关注电力线和杆塔等主体要素的识别和提取[3 ] ,分类精度应在85%以上.常用的分类算法可分为基于语义规则的点云分类和基于机器学习的点云分类[4 ] ,前者根据各类地物的空间分布特点设定一系列规则,如高程阈值、线性约束、空间位置关系约束等,逐一提取各要素.电力线提取主要依赖于线性特征检测,如霍夫变换(Hough Transform, HT)、随机采样一致性(Random Sample And Consensus, RANSAC)线性拟合等[5 ] .杆塔提取主要根据其空间拓扑特性、密度特征等定位其空间位置,进而实现杆塔精确提取[6 ] .基于语义规则的点云分类方法对于地物要素空间分布的规律性要求极高,依赖于多种约束条件和参数阈值,而输电通道地形复杂多变,杆塔类型多样,地形、点云密度和杆塔类型变化以及点云缺失等都会造成该方法在应用中缺乏高抗噪性和泛化性,难以适应业务应用的需求.根据特征提取方式的不同,基于机器学习的点云分类算法可分为基于传统机器学习和基于深度学习方法,目前主流的方法通常根据目标地物特点定义并提取特征,构建多维特征向量、输入分类器进行训练,进而构建分类模型并提取测试集特征,最后输入至分类模型完成分类.根据计算特征时所使用的基元可将该方法分为两类,即基于点的特征和基于对象的特征[7 ] .基于传统机器学习的方法根据输入的特征自动寻找合适阈值进行分类,自动化程度较高,但算法精度与特征的有效性密切相关.目前应用中主要特征大多为手工设计,需要根据丰富的先验知识来定义,而且特征的适用性和有效性也难以保证. ...
Power pylon reconstruction based on abstract template structures using Airborne LiDAR data
1
2019
... 输电通道点云分类是实现线路安全分析和三维重建等应用的基础工作,其目的是从原始点云中提取电力线、杆塔、植被以及建筑等关键要素点云,平均分类精度应不低于80%,尤其关注电力线和杆塔等主体要素的识别和提取[3 ] ,分类精度应在85%以上.常用的分类算法可分为基于语义规则的点云分类和基于机器学习的点云分类[4 ] ,前者根据各类地物的空间分布特点设定一系列规则,如高程阈值、线性约束、空间位置关系约束等,逐一提取各要素.电力线提取主要依赖于线性特征检测,如霍夫变换(Hough Transform, HT)、随机采样一致性(Random Sample And Consensus, RANSAC)线性拟合等[5 ] .杆塔提取主要根据其空间拓扑特性、密度特征等定位其空间位置,进而实现杆塔精确提取[6 ] .基于语义规则的点云分类方法对于地物要素空间分布的规律性要求极高,依赖于多种约束条件和参数阈值,而输电通道地形复杂多变,杆塔类型多样,地形、点云密度和杆塔类型变化以及点云缺失等都会造成该方法在应用中缺乏高抗噪性和泛化性,难以适应业务应用的需求.根据特征提取方式的不同,基于机器学习的点云分类算法可分为基于传统机器学习和基于深度学习方法,目前主流的方法通常根据目标地物特点定义并提取特征,构建多维特征向量、输入分类器进行训练,进而构建分类模型并提取测试集特征,最后输入至分类模型完成分类.根据计算特征时所使用的基元可将该方法分为两类,即基于点的特征和基于对象的特征[7 ] .基于传统机器学习的方法根据输入的特征自动寻找合适阈值进行分类,自动化程度较高,但算法精度与特征的有效性密切相关.目前应用中主要特征大多为手工设计,需要根据丰富的先验知识来定义,而且特征的适用性和有效性也难以保证. ...
点云信息提取研究进展和展望
1
2017
... 输电通道点云分类是实现线路安全分析和三维重建等应用的基础工作,其目的是从原始点云中提取电力线、杆塔、植被以及建筑等关键要素点云,平均分类精度应不低于80%,尤其关注电力线和杆塔等主体要素的识别和提取[3 ] ,分类精度应在85%以上.常用的分类算法可分为基于语义规则的点云分类和基于机器学习的点云分类[4 ] ,前者根据各类地物的空间分布特点设定一系列规则,如高程阈值、线性约束、空间位置关系约束等,逐一提取各要素.电力线提取主要依赖于线性特征检测,如霍夫变换(Hough Transform, HT)、随机采样一致性(Random Sample And Consensus, RANSAC)线性拟合等[5 ] .杆塔提取主要根据其空间拓扑特性、密度特征等定位其空间位置,进而实现杆塔精确提取[6 ] .基于语义规则的点云分类方法对于地物要素空间分布的规律性要求极高,依赖于多种约束条件和参数阈值,而输电通道地形复杂多变,杆塔类型多样,地形、点云密度和杆塔类型变化以及点云缺失等都会造成该方法在应用中缺乏高抗噪性和泛化性,难以适应业务应用的需求.根据特征提取方式的不同,基于机器学习的点云分类算法可分为基于传统机器学习和基于深度学习方法,目前主流的方法通常根据目标地物特点定义并提取特征,构建多维特征向量、输入分类器进行训练,进而构建分类模型并提取测试集特征,最后输入至分类模型完成分类.根据计算特征时所使用的基元可将该方法分为两类,即基于点的特征和基于对象的特征[7 ] .基于传统机器学习的方法根据输入的特征自动寻找合适阈值进行分类,自动化程度较高,但算法精度与特征的有效性密切相关.目前应用中主要特征大多为手工设计,需要根据丰富的先验知识来定义,而且特征的适用性和有效性也难以保证. ...
点云信息提取研究进展和展望
1
2017
... 输电通道点云分类是实现线路安全分析和三维重建等应用的基础工作,其目的是从原始点云中提取电力线、杆塔、植被以及建筑等关键要素点云,平均分类精度应不低于80%,尤其关注电力线和杆塔等主体要素的识别和提取[3 ] ,分类精度应在85%以上.常用的分类算法可分为基于语义规则的点云分类和基于机器学习的点云分类[4 ] ,前者根据各类地物的空间分布特点设定一系列规则,如高程阈值、线性约束、空间位置关系约束等,逐一提取各要素.电力线提取主要依赖于线性特征检测,如霍夫变换(Hough Transform, HT)、随机采样一致性(Random Sample And Consensus, RANSAC)线性拟合等[5 ] .杆塔提取主要根据其空间拓扑特性、密度特征等定位其空间位置,进而实现杆塔精确提取[6 ] .基于语义规则的点云分类方法对于地物要素空间分布的规律性要求极高,依赖于多种约束条件和参数阈值,而输电通道地形复杂多变,杆塔类型多样,地形、点云密度和杆塔类型变化以及点云缺失等都会造成该方法在应用中缺乏高抗噪性和泛化性,难以适应业务应用的需求.根据特征提取方式的不同,基于机器学习的点云分类算法可分为基于传统机器学习和基于深度学习方法,目前主流的方法通常根据目标地物特点定义并提取特征,构建多维特征向量、输入分类器进行训练,进而构建分类模型并提取测试集特征,最后输入至分类模型完成分类.根据计算特征时所使用的基元可将该方法分为两类,即基于点的特征和基于对象的特征[7 ] .基于传统机器学习的方法根据输入的特征自动寻找合适阈值进行分类,自动化程度较高,但算法精度与特征的有效性密切相关.目前应用中主要特征大多为手工设计,需要根据丰富的先验知识来定义,而且特征的适用性和有效性也难以保证. ...
Multi-view convolutional neural networks for 3D shape recognition
1
2015
... 深度学习可以从数据中自动学习特征而不再依赖于人工设计,广泛应用于图像处理领域.传统的深度学习模型要求输入的数据具有规则的结构(如图像可被视为一种由像素组成的规则矩阵),而点云具有非结构化、无序性、离散性,无法直接输入传统的二维深度学习模型.近年来,很多学者不断深化深度学习技术并将其用于三维计算机视觉,并提出了多种点云规则化方法,将离散点云转换为规则格式,如图像、三维体素等[8 -9 ] .基于点的深度学习方法可直接将原始点云作为输入,充分保留了点的三维信息[10 -11 ] .以上分类算法在公开的室内场景数据集取得了较好的分类效果,但对于复杂的室外场景如Semantic 3D数据集仍有较大的精度提升空间[12 ] .输电通道作为一种复杂且重要的室外场景,其点云数据存在典型的类别不均衡性,点云分类精度和效率对机载LiDAR电力巡检业务化有重要意义[13 ] . ...
Multi-view convolutional neural networks for 3D shape recognition
1
2015
... 深度学习可以从数据中自动学习特征而不再依赖于人工设计,广泛应用于图像处理领域.传统的深度学习模型要求输入的数据具有规则的结构(如图像可被视为一种由像素组成的规则矩阵),而点云具有非结构化、无序性、离散性,无法直接输入传统的二维深度学习模型.近年来,很多学者不断深化深度学习技术并将其用于三维计算机视觉,并提出了多种点云规则化方法,将离散点云转换为规则格式,如图像、三维体素等[8 -9 ] .基于点的深度学习方法可直接将原始点云作为输入,充分保留了点的三维信息[10 -11 ] .以上分类算法在公开的室内场景数据集取得了较好的分类效果,但对于复杂的室外场景如Semantic 3D数据集仍有较大的精度提升空间[12 ] .输电通道作为一种复杂且重要的室外场景,其点云数据存在典型的类别不均衡性,点云分类精度和效率对机载LiDAR电力巡检业务化有重要意义[13 ] . ...
Volumetric and multi-view CNNS for object classification on 3D data
1
2016
... 深度学习可以从数据中自动学习特征而不再依赖于人工设计,广泛应用于图像处理领域.传统的深度学习模型要求输入的数据具有规则的结构(如图像可被视为一种由像素组成的规则矩阵),而点云具有非结构化、无序性、离散性,无法直接输入传统的二维深度学习模型.近年来,很多学者不断深化深度学习技术并将其用于三维计算机视觉,并提出了多种点云规则化方法,将离散点云转换为规则格式,如图像、三维体素等[8 -9 ] .基于点的深度学习方法可直接将原始点云作为输入,充分保留了点的三维信息[10 -11 ] .以上分类算法在公开的室内场景数据集取得了较好的分类效果,但对于复杂的室外场景如Semantic 3D数据集仍有较大的精度提升空间[12 ] .输电通道作为一种复杂且重要的室外场景,其点云数据存在典型的类别不均衡性,点云分类精度和效率对机载LiDAR电力巡检业务化有重要意义[13 ] . ...
Volumetric and multi-view CNNS for object classification on 3D data
1
2016
... 深度学习可以从数据中自动学习特征而不再依赖于人工设计,广泛应用于图像处理领域.传统的深度学习模型要求输入的数据具有规则的结构(如图像可被视为一种由像素组成的规则矩阵),而点云具有非结构化、无序性、离散性,无法直接输入传统的二维深度学习模型.近年来,很多学者不断深化深度学习技术并将其用于三维计算机视觉,并提出了多种点云规则化方法,将离散点云转换为规则格式,如图像、三维体素等[8 -9 ] .基于点的深度学习方法可直接将原始点云作为输入,充分保留了点的三维信息[10 -11 ] .以上分类算法在公开的室内场景数据集取得了较好的分类效果,但对于复杂的室外场景如Semantic 3D数据集仍有较大的精度提升空间[12 ] .输电通道作为一种复杂且重要的室外场景,其点云数据存在典型的类别不均衡性,点云分类精度和效率对机载LiDAR电力巡检业务化有重要意义[13 ] . ...
Pointnet++: Deep hierarchical feature learning on point sets in a metric space
3
2017
... 深度学习可以从数据中自动学习特征而不再依赖于人工设计,广泛应用于图像处理领域.传统的深度学习模型要求输入的数据具有规则的结构(如图像可被视为一种由像素组成的规则矩阵),而点云具有非结构化、无序性、离散性,无法直接输入传统的二维深度学习模型.近年来,很多学者不断深化深度学习技术并将其用于三维计算机视觉,并提出了多种点云规则化方法,将离散点云转换为规则格式,如图像、三维体素等[8 -9 ] .基于点的深度学习方法可直接将原始点云作为输入,充分保留了点的三维信息[10 -11 ] .以上分类算法在公开的室内场景数据集取得了较好的分类效果,但对于复杂的室外场景如Semantic 3D数据集仍有较大的精度提升空间[12 ] .输电通道作为一种复杂且重要的室外场景,其点云数据存在典型的类别不均衡性,点云分类精度和效率对机载LiDAR电力巡检业务化有重要意义[13 ] . ...
... 基于样本加权PointNet++的点云分类方法由经典PointNet++模型(
图1 )和样本加权处理组成,前者包含分层点集特征学习和点特征传播:输入原始点云数据、通过分层点集特征学习提取不同分辨率点特征,再经过点特征传播获取所有原始点的特征,最后通过softmax层得到每个点属于各个类别的得分.
图1 PointNet++点云分类网络架构<sup>[<xref ref-type="bibr" rid="R10">10</xref>]</sup> PointNet++ architecture for point cloud classification<sup>[<xref ref-type="bibr" rid="R10">10</xref>]</sup> Fig.1 ![]()
2.1 分层点集特征学习 该方法由多个集合抽象模块(Set Abstraction)组成,其作用是将输入的点云分成多个局部点集并提取每个点集的全局特征,然后使特征不断抽象,从而获取更高维的特征,主要包含以下3个基本单元:①采样层.采用迭代最远点采样算法(Farthest Point Sampling, FPS)完成局部区域质心集的构建[14 ] .首先随机选取一个点作为初始点,然后选择离这个点距离最远的点,将该点加入质心集中,并作为起点继续迭代,直至选取的质心个数满足给定个数N ' . ②分组层.根据质心点集将点云数据分成多个局部点集.输入数据的尺寸为N ×(d +C ),其中N 为输入的点数目,d 为点的坐标维数(通常为3),C 为其他属性维度,如强度、回波等.以采样层选取的质心点为圆心,根据预先设定的搜索半径r 获取球邻域内所有点,输出得到N’ 个局部点云,其大小为k ×d ,k 为每个局部区域点云数目.③PointNet层.该层学习每个局部区域点云的全局特征,即抽象区域点云的整体性特征.输入数据是分组层获取的多组局部点集,其尺寸为N ’ × k × d C ' N ’ × d + C '
... [
10 ]
Fig.1 ![]()
2.1 分层点集特征学习 该方法由多个集合抽象模块(Set Abstraction)组成,其作用是将输入的点云分成多个局部点集并提取每个点集的全局特征,然后使特征不断抽象,从而获取更高维的特征,主要包含以下3个基本单元:①采样层.采用迭代最远点采样算法(Farthest Point Sampling, FPS)完成局部区域质心集的构建[14 ] .首先随机选取一个点作为初始点,然后选择离这个点距离最远的点,将该点加入质心集中,并作为起点继续迭代,直至选取的质心个数满足给定个数N ' . ②分组层.根据质心点集将点云数据分成多个局部点集.输入数据的尺寸为N ×(d +C ),其中N 为输入的点数目,d 为点的坐标维数(通常为3),C 为其他属性维度,如强度、回波等.以采样层选取的质心点为圆心,根据预先设定的搜索半径r 获取球邻域内所有点,输出得到N’ 个局部点云,其大小为k ×d ,k 为每个局部区域点云数目.③PointNet层.该层学习每个局部区域点云的全局特征,即抽象区域点云的整体性特征.输入数据是分组层获取的多组局部点集,其尺寸为N ’ × k × d C ' N ’ × d + C '
Pointnet++: Deep hierarchical feature learning on point sets in a metric space
3
2017
... 深度学习可以从数据中自动学习特征而不再依赖于人工设计,广泛应用于图像处理领域.传统的深度学习模型要求输入的数据具有规则的结构(如图像可被视为一种由像素组成的规则矩阵),而点云具有非结构化、无序性、离散性,无法直接输入传统的二维深度学习模型.近年来,很多学者不断深化深度学习技术并将其用于三维计算机视觉,并提出了多种点云规则化方法,将离散点云转换为规则格式,如图像、三维体素等[8 -9 ] .基于点的深度学习方法可直接将原始点云作为输入,充分保留了点的三维信息[10 -11 ] .以上分类算法在公开的室内场景数据集取得了较好的分类效果,但对于复杂的室外场景如Semantic 3D数据集仍有较大的精度提升空间[12 ] .输电通道作为一种复杂且重要的室外场景,其点云数据存在典型的类别不均衡性,点云分类精度和效率对机载LiDAR电力巡检业务化有重要意义[13 ] . ...
... 基于样本加权PointNet++的点云分类方法由经典PointNet++模型(
图1 )和样本加权处理组成,前者包含分层点集特征学习和点特征传播:输入原始点云数据、通过分层点集特征学习提取不同分辨率点特征,再经过点特征传播获取所有原始点的特征,最后通过softmax层得到每个点属于各个类别的得分.
图1 PointNet++点云分类网络架构<sup>[<xref ref-type="bibr" rid="R10">10</xref>]</sup> PointNet++ architecture for point cloud classification<sup>[<xref ref-type="bibr" rid="R10">10</xref>]</sup> Fig.1 ![]()
2.1 分层点集特征学习 该方法由多个集合抽象模块(Set Abstraction)组成,其作用是将输入的点云分成多个局部点集并提取每个点集的全局特征,然后使特征不断抽象,从而获取更高维的特征,主要包含以下3个基本单元:①采样层.采用迭代最远点采样算法(Farthest Point Sampling, FPS)完成局部区域质心集的构建[14 ] .首先随机选取一个点作为初始点,然后选择离这个点距离最远的点,将该点加入质心集中,并作为起点继续迭代,直至选取的质心个数满足给定个数N ' . ②分组层.根据质心点集将点云数据分成多个局部点集.输入数据的尺寸为N ×(d +C ),其中N 为输入的点数目,d 为点的坐标维数(通常为3),C 为其他属性维度,如强度、回波等.以采样层选取的质心点为圆心,根据预先设定的搜索半径r 获取球邻域内所有点,输出得到N’ 个局部点云,其大小为k ×d ,k 为每个局部区域点云数目.③PointNet层.该层学习每个局部区域点云的全局特征,即抽象区域点云的整体性特征.输入数据是分组层获取的多组局部点集,其尺寸为N ’ × k × d C ' N ’ × d + C '
... [
10 ]
Fig.1 ![]()
2.1 分层点集特征学习 该方法由多个集合抽象模块(Set Abstraction)组成,其作用是将输入的点云分成多个局部点集并提取每个点集的全局特征,然后使特征不断抽象,从而获取更高维的特征,主要包含以下3个基本单元:①采样层.采用迭代最远点采样算法(Farthest Point Sampling, FPS)完成局部区域质心集的构建[14 ] .首先随机选取一个点作为初始点,然后选择离这个点距离最远的点,将该点加入质心集中,并作为起点继续迭代,直至选取的质心个数满足给定个数N ' . ②分组层.根据质心点集将点云数据分成多个局部点集.输入数据的尺寸为N ×(d +C ),其中N 为输入的点数目,d 为点的坐标维数(通常为3),C 为其他属性维度,如强度、回波等.以采样层选取的质心点为圆心,根据预先设定的搜索半径r 获取球邻域内所有点,输出得到N’ 个局部点云,其大小为k ×d ,k 为每个局部区域点云数目.③PointNet层.该层学习每个局部区域点云的全局特征,即抽象区域点云的整体性特征.输入数据是分组层获取的多组局部点集,其尺寸为N ’ × k × d C ' N ’ × d + C '
PointCNN: convolution on x-transformed points
1
2018
... 深度学习可以从数据中自动学习特征而不再依赖于人工设计,广泛应用于图像处理领域.传统的深度学习模型要求输入的数据具有规则的结构(如图像可被视为一种由像素组成的规则矩阵),而点云具有非结构化、无序性、离散性,无法直接输入传统的二维深度学习模型.近年来,很多学者不断深化深度学习技术并将其用于三维计算机视觉,并提出了多种点云规则化方法,将离散点云转换为规则格式,如图像、三维体素等[8 -9 ] .基于点的深度学习方法可直接将原始点云作为输入,充分保留了点的三维信息[10 -11 ] .以上分类算法在公开的室内场景数据集取得了较好的分类效果,但对于复杂的室外场景如Semantic 3D数据集仍有较大的精度提升空间[12 ] .输电通道作为一种复杂且重要的室外场景,其点云数据存在典型的类别不均衡性,点云分类精度和效率对机载LiDAR电力巡检业务化有重要意义[13 ] . ...
PointCNN: convolution on x-transformed points
1
2018
... 深度学习可以从数据中自动学习特征而不再依赖于人工设计,广泛应用于图像处理领域.传统的深度学习模型要求输入的数据具有规则的结构(如图像可被视为一种由像素组成的规则矩阵),而点云具有非结构化、无序性、离散性,无法直接输入传统的二维深度学习模型.近年来,很多学者不断深化深度学习技术并将其用于三维计算机视觉,并提出了多种点云规则化方法,将离散点云转换为规则格式,如图像、三维体素等[8 -9 ] .基于点的深度学习方法可直接将原始点云作为输入,充分保留了点的三维信息[10 -11 ] .以上分类算法在公开的室内场景数据集取得了较好的分类效果,但对于复杂的室外场景如Semantic 3D数据集仍有较大的精度提升空间[12 ] .输电通道作为一种复杂且重要的室外场景,其点云数据存在典型的类别不均衡性,点云分类精度和效率对机载LiDAR电力巡检业务化有重要意义[13 ] . ...
Semantic3D.net: a new large-scale point cloud classification benchmark
1
2017
... 深度学习可以从数据中自动学习特征而不再依赖于人工设计,广泛应用于图像处理领域.传统的深度学习模型要求输入的数据具有规则的结构(如图像可被视为一种由像素组成的规则矩阵),而点云具有非结构化、无序性、离散性,无法直接输入传统的二维深度学习模型.近年来,很多学者不断深化深度学习技术并将其用于三维计算机视觉,并提出了多种点云规则化方法,将离散点云转换为规则格式,如图像、三维体素等[8 -9 ] .基于点的深度学习方法可直接将原始点云作为输入,充分保留了点的三维信息[10 -11 ] .以上分类算法在公开的室内场景数据集取得了较好的分类效果,但对于复杂的室外场景如Semantic 3D数据集仍有较大的精度提升空间[12 ] .输电通道作为一种复杂且重要的室外场景,其点云数据存在典型的类别不均衡性,点云分类精度和效率对机载LiDAR电力巡检业务化有重要意义[13 ] . ...
Fast and accurate power line corridor survey using spatial line clustering of point cloud
1
2021
... 深度学习可以从数据中自动学习特征而不再依赖于人工设计,广泛应用于图像处理领域.传统的深度学习模型要求输入的数据具有规则的结构(如图像可被视为一种由像素组成的规则矩阵),而点云具有非结构化、无序性、离散性,无法直接输入传统的二维深度学习模型.近年来,很多学者不断深化深度学习技术并将其用于三维计算机视觉,并提出了多种点云规则化方法,将离散点云转换为规则格式,如图像、三维体素等[8 -9 ] .基于点的深度学习方法可直接将原始点云作为输入,充分保留了点的三维信息[10 -11 ] .以上分类算法在公开的室内场景数据集取得了较好的分类效果,但对于复杂的室外场景如Semantic 3D数据集仍有较大的精度提升空间[12 ] .输电通道作为一种复杂且重要的室外场景,其点云数据存在典型的类别不均衡性,点云分类精度和效率对机载LiDAR电力巡检业务化有重要意义[13 ] . ...
Analysis of farthest point sampling for approximating geodesics in a graph
1
2016
... 该方法由多个集合抽象模块(Set Abstraction)组成,其作用是将输入的点云分成多个局部点集并提取每个点集的全局特征,然后使特征不断抽象,从而获取更高维的特征,主要包含以下3个基本单元:①采样层.采用迭代最远点采样算法(Farthest Point Sampling, FPS)完成局部区域质心集的构建[14 ] .首先随机选取一个点作为初始点,然后选择离这个点距离最远的点,将该点加入质心集中,并作为起点继续迭代,直至选取的质心个数满足给定个数N ' . ②分组层.根据质心点集将点云数据分成多个局部点集.输入数据的尺寸为N ×(d +C ),其中N 为输入的点数目,d 为点的坐标维数(通常为3),C 为其他属性维度,如强度、回波等.以采样层选取的质心点为圆心,根据预先设定的搜索半径r 获取球邻域内所有点,输出得到N’ 个局部点云,其大小为k ×d ,k 为每个局部区域点云数目.③PointNet层.该层学习每个局部区域点云的全局特征,即抽象区域点云的整体性特征.输入数据是分组层获取的多组局部点集,其尺寸为N ’ × k × d C ' N ’ × d + C '
Point-based classification of power line corridor scene using random forests
1
2013
... 所有实验均在一台服务器上完成,配置为:Intel(R) Xeon(R) CPU E5-2603 v3 @ 1.60 GHz,显卡为NVIDIA Tesla K40c、Tesla K40 m,256 G内存.在训练过程中,设置初始学习率为0.01,每迭代4 080次降为原来的0.7倍,学习动量为0.9,批处理大小为16.随机森林算法使用的特征包括基于特征值、纵剖面、密度和高度的特征[15 ] . ...
Systematic comparison of power corridor classification methods from ALS point clouds
1
2019
... 随机森林算法是目前输电通道点云分类中较为常用的算法[16 ] ,本实验从精度和效率两方面与之进行比较.图3 是采用两种算法对两个测试数据集的分类结果,其中白色框为算法错分较严重的区域.可以看出,随机森林算法对植被的分类结果优于PointNet++方法,一定程度上可分出低植被点和地面点.图4 表明,随机森林算法在建筑类别的分类效果远不如PointNet++方法,与地面点、植被混淆严重;在提取杆塔类别时,也出现了较多的漏分和错分,杆塔点多与植被和电力线点混淆. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}