




1 引 言
城区土地覆被在调整土地资源配置,城市规划发展及管理等环节起着重要作用[1-2]。城市土地覆被类型复杂,常因人工干预发生转化与改变,遥感技术能够快速实时监测地表信息,为识别土地覆被类型提供高效快捷的技术手段。Landsat TM/ETM+/OLI中等分辨率数据广泛应用于城市区域土地覆被分类研究,并能够获得较好的分类效果[3-5]。但由于城市地物结构复杂的特殊性,选择高分辨率遥感影像可以提供更多详细准确的地物特征。大多数研究采用QuickBird、IKONOS、WorldView等高分辨率数据提取城区土地覆被信息,国产高分辨率数据应用相对较少,对于新发布的卫星数据的适用性研究空缺严重[6-11]。相较于国外商用卫星数据,国产高分辨率遥感数据的应用效果需要得到更多关注。
高分辨率数据的应用,结合高性能的分类器,能够进一步有效提高地物识别精度。传统的机器学习算法,如人工神经网络,支持向量机,随机森林等模型性能较稳定,学习能力强,已广泛应用于遥感影像分类研究[14-16]。但机器学习算法需要通过提取高维特征变量中的信息,区分不同的地物特征,提高识别精度。对于高分辨率遥感影像,受光谱波段数量少的限制,会对复杂地物的精细识别增加难度。目前,深度学习方法在信息识别与提取方面发挥出极大的优势[17-20]。卷积神经网络(Convolutional Neural Network,CNN)模型能够利用少量的特征变量,通过多层神经网络结构,逐层提取特征,挖掘深层次的高级信息,更好地表达目标的本质特性[21-24]。如何利用CNN的优势,采用较少的光谱变量,实现城区土地覆被精细分类,解决传统方法在有限的条件下对于复杂地物难区分的问题,具有重要意义。
以吉林一号视频07星(JL1-07B)高分辨率遥感数据为主要数据源,采用深度卷积网络模型,仅利用影像原始波谱特征,对城区土地覆被类型进行精细化分类,并与传统的分类算法,包括最大似然分类法(Maximum Likelihood Classification,MLC),多层感知机分类法(Multi-layer Perceptron,MLP)和支持向量机分类法(Support Vector Machine,SVM)进行比较,从影像数据的应用,分类模型的性能和波谱特征对地物识别的精度影响3个方面综合分析,深入研究新型国产卫星数据和深度卷积神经网络模型在城区土地覆被识别方面的应用潜能,为推广国产卫星在城市规划与管理方面的应用提供科学依据。
2 研究区和数据
2.1 研究区概况
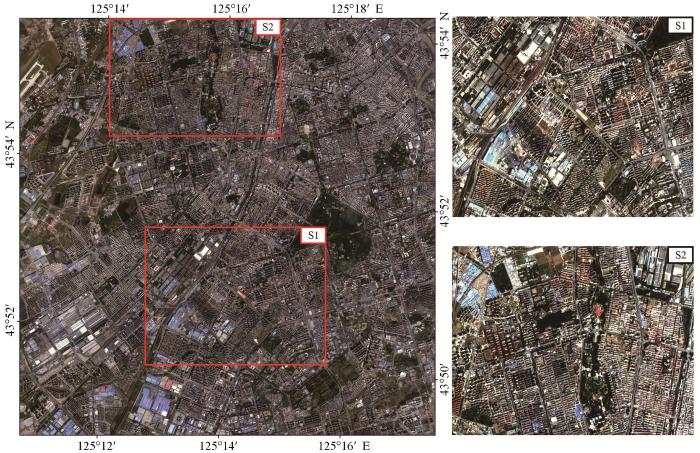
研究区位于中国吉林省长春市,地理坐标为43°49′22″~43°55′37″N,125°12′33″~125°17′34″E,包括了长春市城市中心区域及部分城郊地区,两种功能区中的土地覆被类型能够较全面的代表城市土地覆被特点。研究区内的土地覆被类型包括建筑物、沥青路面、铁路、林地、草地、裸土和水体。其中,建筑物按照表面建筑材料的类型,具体分为混凝土屋顶建筑物,金属屋顶建筑物,黏土屋顶建筑物和塑胶表面建筑物。分别选取城市中心区域(S1)及城郊区域(S2)作为重点实验区(图1),区内地物类型具有代表性,能够反映全区典型地物特征,用以详细分析土地覆被类型的识别情况。
图1
2.2 遥感数据
研究采用的数据为JL1-07B卫星获取的推扫影像,L1级产品,成像时间为2019年9月26日,图像质量良好,清晰无云。JL1-07B卫星搭载的传感器包括6个多光谱波段,分别为蓝光波段B1(460~520 nm),绿光波段B2(510~580 nm),红光波段B3(630~690 nm),红边波段B4(700~750 nm)和近红外波段B5(770~890 nm)。作为高分辨率遥感卫星,JL1-07B的多光谱波段空间分辨率为3.68 m,能够精确提供丰富的地物影像特征,提高识别精度。L1级数据产品已经过辐射定标和几何粗校正处理,为了使影像空间信息更准确,借助影像的RPC文件,采用PCI软件对数据进行正射校正,消减卫星影像在成像过程中由于传感器姿态、拍摄角度等因素引起的几何畸变。利用Google Earth同时相影像作为地理参考图,对JL1-07B数据进行几何精校正处理,提高后续试验的地物空间位置准确性。
3 研究方法
3.1 卷积神经网络
其中: f(▪)代表激活函数;ω和b分别代表神经网络第l层的连接权重值和偏置参数;Ol-1 代表第l-1层神经元的输出;poolp 代表窗口大小为p的池化层;*代表卷积相乘。
CNN通过网络层的逐层提取来获取丰富的影像特征信息,但网络层级过多模型过于复杂,会引起过拟合现象。因此,综合衡量模型泛化能力、模型复杂度、运行效率及样本量等多方面问题,设计CNN模型结构如图2所示。输入层为遥感影像原始光谱组合,输入窗口为8×8,共设置2个卷积层,卷积核大小为3×3,卷积特征图的个数为32;在每个卷积层后面增加池化层,用以减少特征向量维度和模型的参数并增加感受野,池化层的卷积核大小为2×2,选用最大池化方法;为了降低过拟合风险,设置dropout参数为0.3。池化层后设置一个全连接层,经过ReLU函数激活后,作为输出层中softmax分类器的输入变量,最终输出各类别的概率结果,即分类结果图。模型在学习率为0.006 5的条件下,经过300次的迭代完成训练。
图2

3.2 传统分类方法
选择MLC、MLP和SVM 共3种传统分类方法与CNN模型进行比较,对比与评价各分类方法在城区土地覆被信息提取中的应用效果。最大似然分类法(MLC)基于统计理论根据最大似然比贝叶斯判决准则法建立非线性判别函数集,计算待分类样区的归属概率进行分类 [28]。MLP是一种多层前馈神经网络,通过多个感知器实现非线性分类问题,由一个输入层,一个或多个隐含层和一个输出层组成。信号在向前传递的过程中,经过输入层和隐含层逐层处理,每层神经元与下一层神经元全互连,最终经过输出层获得预测结果。若预测值不满足期望输出,通过反向传播,调整网络的权值和阈值,从而使网络不断更新,直至逼近期望输出[29]。SVM是依据结构风险最小化原则,构建一个分类平面来判别不同类别之间的间隔,通过使类别间隔最大化进行分类 [30]。MLP和SVM是目前应用广泛的机器学习分类算法,需要设置超参数:SVM的惩罚系数C值设为1 000,选用RBF核函数,其参数γ设置为0.1;MLP的隐含层设置为2层,每层节点数为20,学习率参数设置为0.2,动量系数为0.7。
3.3 样本选取及精度评价
样本选取采用分层随机抽样法(Stratified Random Sampling)。分层随机抽样能保证选取的样本具有代表性,并均匀分布于某一地物的地理空间。不同地物训练集样本数量相对均衡,避免模型训练过程中陷入局部最优。在两个实验区分别建立地物解译标志,参照Google Earth高分辨率影像,结合实地调查采样结果,选取足够数量的训练样本和测试样本(表1)。对每一类别地物,训练样本和测试样本来自不同的地块,保证训练和测试样本的独立性。每类地物的样本数量与地物面积成比例。训练样本用于训练模型,测试样本用于测试模型的分类精度。分类结果评价指标主要依据混淆矩阵计算得到总体精度(Overall Accuracy, OA),Kappa系数,生产者精度(Produce´s Accuracy, PA)和用户精度(User’s Accuracy, UA)。为了进一步评价不同分类方法下,各地物的识别精度受波谱特征的影响程度,采用生产者精度变化率描述波段组合变化引起的精度变化量,具体公式如下:
其中:PAi和PAj代表Ti实验组和Tj实验组中土地覆被类型的生产者精度,且j>i。PAj-i为Tj实验组较Ti实验组的生产者精度变化率。
表1 样本统计表
Table 1
| S1实验区 | S2实验区 | ||||||
|---|---|---|---|---|---|---|---|
| 合计 | 3 536 | 3 506 | 3 603 | 3 521 | |||
| 土地覆被类型 | 类型代码 | 训练样本/个 | 测试样本/个 | 类型代码 | 训练样本/个 | 测试样本/个 | |
| 混凝土屋顶 | C1 | 545 | 541 | C1 | 505 | 507 | |
| 金属屋顶 | C2 | 508 | 501 | C2 | 418 | 352 | |
| 黏土屋顶 | C3 | 358 | 371 | C3 | 461 | 485 | |
| 塑胶表面 | C4 | 314 | 309 | C4 | 310 | 293 | |
| 沥青路面 | C5 | 440 | 438 | C5 | 481 | 483 | |
| 铁路 | C6 | 226 | 221 | C7 | 510 | 485 | |
| 林地 | C7 | 516 | 513 | C8 | 314 | 311 | |
| 草地 | C8 | 317 | 303 | C9 | 300 | 301 | |
| 裸土 | C9 | 312 | 309 | C10 | 304 | 304 | |
3.4 实验分组
为了探究波谱特征对不同地面目标识别精度的影响,针对JL1-07B卫星的5个光谱波段,共设计3组实验,应用不同的波谱组合和分类方法分别对S1和S2实验区的土地覆被信息进行提取。T1组包括蓝光波段(B1)、绿光波段(B2)和红光波段(B3);T2组在T1组的基础上增加近红外波段(B5);T3组在T2组的基础上增加红边波段(B4)。3个不同的波谱组合分别代表了可见光谱,可见光—近红外光谱和红边光谱,能够从多方面验证波谱特征对地物提取的影响程度。
4 结果与分析
4.1 分类模型比较
4.1.1 总体分类精度评价
由表2,应用所有波谱特征训练MLC、MLP、SVM和CNN模型,比较各分类方法的总体精度和Kappa系数。在S1实验区,MLC、MLP和SVM总体分类精度接近,能够达到70%以上。MLP的总体分类精度和Kappa系数最高,分别为74.19%和0.71。CNN模型的总体精度为86.57%,Kappa系数为0.85,比获得较高精度的MLP算法高约12.38%和0.14。在S2实验区,具有相似的分类结果,CNN总体精度最高为91.47%,Kappa系数为0.90,比精度较高的MLP算法高12.05%和0.13。综合来看,CNN模型在两个实验区均取得了较高的分类精度,并显著优于其他传统分类方法,在城区信息识别方面表现出了明显的优势。
表2 不同分类方法总体精度和Kappa系数对比
Table 2
| 模型 | S1实验区 | S2实验区 | ||
|---|---|---|---|---|
| OA/% | Kappa系数 | OA/% | Kappa系数 | |
| MLC | 73.05 | 0.70 | 78.48 | 0.76 |
| MLP | 74.19 | 0.71 | 79.42 | 0.77 |
| SVM | 72.99 | 0.69 | 78.65 | 0.76 |
| CNN | 86.57 | 0.85 | 91.47 | 0.90 |
4.1.2 不同土地覆被类型的分类精度评价
由表3,应用所有波谱特征训练MLC、MLP、SVM和CNN模型,比较不同土地覆被类型的生产者精度。在S1实验区,采用传统分类方法,混凝土屋顶识别精度最低,MLC、MLP和SVM的分类精度分别为32.35%、56.93%、49.17%。CNN对该类型的识别精度相对较高,达到86.69%。塑胶表面和裸土无法在MLP和SVM算法中得到很好地识别,精度大约为50%左右,但在CNN模型中,分类精度高于70%。金属屋顶和林地在4种方法中均能够准确识别,精度在96%以上。铁路识别精度最低为MLP算法的57.01%,最高为CNN模型的87.78%。在S2实验区,采用传统方法,塑胶表面和混凝土屋顶识别精度低于60%,利用CNN模型能够高于87%。各分类方法对水体的识别精度较高,除MLC算法只有84.21%,其余方法均能达到90%以上。综合来看,城市中心区和城郊的土地覆被类型不同,景观格局差异性明显,利用CNN模型分类时,平均精度在85%以上,最高可达97.41%,对易混淆及难识别的土地覆被类型,传统方法最高分类精度不到60%,CNN最低能够达到72%以上,表现出显著的优势,取得较高的识别精度。
表3 不同分类方法生产者精度对比
Table 3
| 地物类型 | S1实验区 PA/% | 地物类型 | S2实验区 PA/% | ||||||
|---|---|---|---|---|---|---|---|---|---|
| MLC | MLP | SVM | CNN | MLC | MLP | SVM | CNN | ||
| 混凝土屋顶 | 32.35 | 56.93 | 49.17 | 86.69 | 混凝土屋顶 | 46.75 | 57.40 | 67.85 | 89.55 |
| 金属屋顶 | 100.00 | 99.00 | 99.00 | 97.41 | 金属屋顶 | 95.45 | 94.89 | 94.03 | 95.45 |
| 黏土屋顶 | 70.08 | 74.66 | 78.44 | 88.41 | 黏土屋顶 | 81.44 | 84.33 | 87.84 | 96.91 |
| 塑胶表面 | 60.52 | 57.61 | 55.34 | 77.99 | 塑胶表面 | 77.13 | 52.22 | 36.18 | 87.71 |
| 沥青路面 | 77.63 | 70.32 | 62.33 | 76.48 | 沥青路面 | 75.78 | 76.40 | 70.39 | 79.50 |
| 铁路 | 78.73 | 57.01 | 72.40 | 87.78 | 林地 | 97.38 | 98.47 | 97.60 | 96.94 |
| 林地 | 96.88 | 99.42 | 98.83 | 96.10 | 草地 | 88.75 | 87.78 | 88.10 | 94.86 |
| 草地 | 77.56 | 78.88 | 75.25 | 86.80 | 裸土 | 67.77 | 73.42 | 66.11 | 91.03 |
| 裸土 | 62.14 | 51.46 | 54.05 | 72.49 | 水体 | 84.21 | 90.13 | 92.43 | 92.76 |
4.1.3 CNN模型混淆矩阵
表4 S1实验区CNN模型的混淆矩阵
Table 4
| S1实验区 | 混凝土屋顶 | 金属屋顶 | 黏土屋顶 | 塑胶表面 | 沥青路面 | 铁路 | 林地 | 草地 | 裸土 | 总和 | UA/% |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 混凝土屋顶 | 469 | 12 | 18 | 0 | 53 | 12 | 20 | 0 | 13 | 597 | 78.56 |
| 金属屋顶 | 0 | 488 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 488 | 100 |
| 黏土屋顶 | 12 | 0 | 328 | 3 | 0 | 0 | 0 | 0 | 0 | 343 | 95.63 |
| 塑胶表面 | 0 | 0 | 1 | 241 | 17 | 0 | 0 | 0 | 25 | 284 | 84.86 |
| 沥青路面 | 26 | 1 | 0 | 1 | 335 | 2 | 0 | 1 | 27 | 393 | 85.24 |
| 铁路 | 16 | 0 | 12 | 0 | 19 | 194 | 0 | 0 | 14 | 255 | 76.08 |
| 林地 | 0 | 0 | 0 | 0 | 3 | 2 | 493 | 39 | 6 | 543 | 90.79 |
| 草地 | 0 | 0 | 0 | 23 | 2 | 0 | 0 | 263 | 0 | 288 | 91.32 |
| 裸土 | 18 | 0 | 12 | 41 | 9 | 11 | 0 | 0 | 224 | 315 | 71.11 |
| 总和 | 541 | 501 | 371 | 309 | 438 | 221 | 513 | 303 | 309 | 3 506 | |
| PA/% | 86.69 | 97.41 | 88.41 | 77.99 | 76.48 | 87.78 | 96.1 | 86.8 | 72.49 | ||
| OA/% | 86.57 | ||||||||||
| Kappa | 0.847 4 | ||||||||||
表5 S2实验区CNN模型的混淆矩阵
Table 5
| S2实验区 | 混凝土屋顶 | 金属屋顶 | 黏土屋顶 | 塑胶表面 | 沥青路面 | 林地 | 草地 | 裸土 | 水体 | 总数 | UA/% |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 混凝土屋顶 | 454 | 16 | 5 | 9 | 19 | 0 | 0 | 0 | 0 | 503 | 90.26 |
| 金属屋顶 | 0 | 336 | 0 | 0 | 17 | 0 | 0 | 0 | 0 | 353 | 95.18 |
| 黏土屋顶 | 4 | 0 | 470 | 13 | 0 | 0 | 0 | 0 | 0 | 487 | 96.51 |
| 塑胶表面 | 8 | 0 | 10 | 257 | 2 | 0 | 0 | 0 | 0 | 277 | 92.78 |
| 沥青路面 | 17 | 0 | 0 | 12 | 384 | 0 | 1 | 0 | 0 | 414 | 92.75 |
| 林地 | 0 | 0 | 0 | 0 | 16 | 444 | 9 | 0 | 22 | 491 | 90.43 |
| 草地 | 0 | 0 | 0 | 0 | 1 | 3 | 295 | 27 | 0 | 326 | 90.49 |
| 裸土 | 15 | 0 | 0 | 2 | 6 | 0 | 6 | 274 | 0 | 303 | 90.43 |
| 水体 | 9 | 0 | 0 | 0 | 38 | 11 | 0 | 0 | 282 | 340 | 82.94 |
| 总数 | 507 | 352 | 485 | 293 | 483 | 458 | 311 | 301 | 304 | 3 494 | |
| PA/% | 89.55 | 95.45 | 96.91 | 87.71 | 79.50 | 96.94 | 94.86 | 91.03 | 92.76 | ||
| OA/% | 91.47 | ||||||||||
| Kappa | 0.903 5 | ||||||||||
4.2 波谱特征对分类精度的影响
4.2.1 总体精度的影响评价
由图3可知,综合S1实验区和S2实验区的分类结果,4个模型在T1组的总体分类精度最低。加入近红外波段后,T2组中各方法的分类精度均有显著提升,SVM方法增幅最大,总体精度和Kappa系数最高提升7.5%和0.09。其次为MLP和MLC方法,总体精度最高能够提升5%以上。CNN模型增加幅度最小,总体精度最高提升2.43%。加入红边波段后,T3组中MLP方法增幅较大,最高可提升3.05%,SVM方法的分类精度略有升高,最高提升0.26%,MLC和CNN的总体精度受到影响,略有下降。
图3
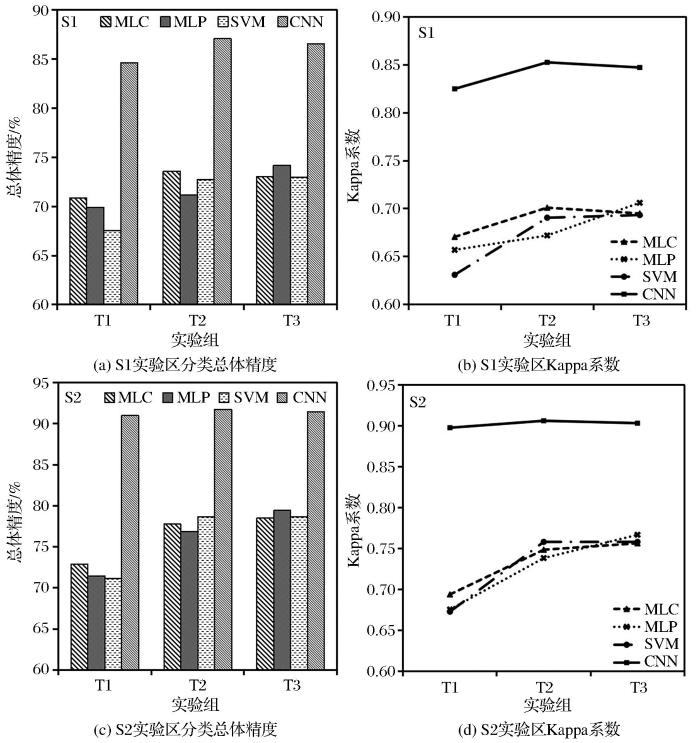
图3
不同波谱组合的总体精度和Kappa系数对比图
Fig.3
Comparison of overall accuracy and Kappa between different groups
4.2.2 不同土地覆被类型分类精度的影响评价
图4表示波谱特征改变后,不同土地覆被类型的生产者精度变化率。由图4(a)和图4(b)对比T1实验组和T2实验组的生产者精度变化率PA2-1。加入近红外波段后,利用MLC、MLP和SVM方法分类时,土地覆被类型的分类精度变化显著。塑胶表面,草地和林地3种类型提升幅度较大,在S1实验区,最高分别提升389.39%(SVM),30.89%(MLP)和4.15%(MLC),在S2实验区,最高分别提升230.04%(MLP),19.48%(SVM)和26.85%(MLC)。利用CNN模型分类时,沥青路面和草地变化幅度最大,最高分别提升16.72%和41.03%,其他地物类型的精度提升相对较小。由图4(c)和图4(d)对比T2实验组与T3实验组的生产者精度变化率PA3-2。加入红边波段后,土地覆被类型的分类精度略有变化,MLP方法受波谱特征影响较大,混凝土屋顶、塑胶表面、沥青路面和林地都有较大幅度升高。CNN模型精度变化最小,平均变化率低于5%。由图4(e)和图4(f)对比T3实验组与T1实验组的生产者精度变化率PA3-1,综合S1实验区和S2实验区的精度变化情况,基于机器学习理论的MLP和SVM算法受波谱特征影响最大,基于统计理论的MLC方法次之,CNN模型在应用不同波谱组合时,土地覆被分类精度受影响程度最小。
图4

图4
不同地物类型生产者精度变化率
Fig.4
Variation rates of Produce´s accuracy for different classes
4.2.3 综合分析
各传统分类模型的性能区别较大,特征变量的选择与应用会较大程度地影响土地覆被的提取精度,尤其对于传统机器学习算法,从足够多的特征变量中挖掘丰富的地物信息是提高分类精度的关键,此外,特征变量冗余或噪声信息会造成精度降低。CNN模型在信息挖掘方面具有显著优势,无需利用过多特征变量,通过模型的多层结构提取深层次特征,并提高分类精度。通过实验证明,在只利用光谱特征的前提下,CNN模型足以获得较高的分类精度,对于易混淆和难识别的土地覆被类型同样能够较精确的识别。相比之下,传统分类方法只应用光谱特征时,由于特征信息单一,无法深入挖掘地物特性,导致错分和混分现象严重。
对于不同的波谱特征集,当土地覆被具有植被特征时,近红外波段的影响最大,草地,林地和塑胶表面建筑物的精度显著提高。其中,塑胶表面建筑物在研究区内多为体育场,场内铺设人工草地,具备植被特征,因此对近红外波段比较敏感。但对其它人工建筑表面,近红外的加入对精度的提升帮助不大,主要因为近红外波段处,混凝土和黏土的波谱特征相似,不易区分。红边波段能够在一定程度上提高植被的提取精度,但相比于近红外波段,精度提高不显著。
4.3 分类结果对比
针对不同的分类算法,选用总体精度较高的波谱特征集合进行土地覆被分类制图,MLC、MLP和SVM方法应用B1、B2、B3、B4、B5共5个波谱变量,CNN模型应用B1、B2、B3和B5共4个波谱变量。由图5,CNN模型的分类结果更好地保留了地物间的空间位置关系,基于像素分类的“椒盐”现象得到了明显的改善。这是由于CNN模型在利用卷积核进行特征挖掘的过程中,能够考虑像素间的邻域关系,极大程度地保留了相邻像素的空间特征。应用CNN模型获得的土地覆被分类图与原始影像基本一致,地物斑块集中,但在MLC、MLP和SVM算法中,土地覆被错分和混分现象严重,斑块破碎程度较高,无法很好地保留地物空间位置特点。
图5
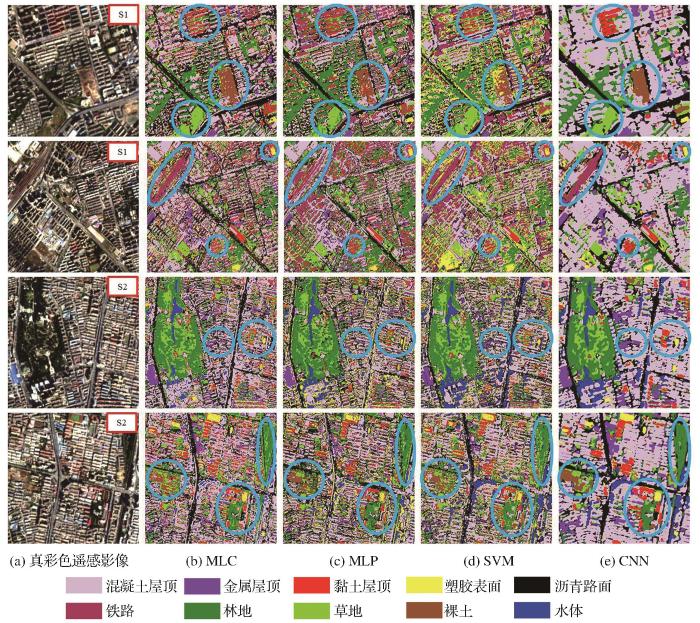
图5
不同分类方法城区土地覆被分类对比图
Fig.5
Urban land cover classification maps achieved using different methods
5 结 论
本研究利用深度卷积神经网络(CNN),全面评估了JL1-07B高分辨率遥感卫星城市土地覆被制图潜力,得到如下结论:
(1)使用不同波段数量实验条件下,CNN总体分类精度均显著高于MLC、MLP和SVM 3种传统分类算法,提高幅度12%以上。此外,CNN模型能够考虑像素间的邻域关系,极大程度地保留了土地覆被的空间特征,显著降低了传统分类结果的“椒盐”噪音。
(2)JL1-07B红边波段对所有方法总体分类精度贡献十分有限,提高幅度在3%以内;相比之下,近红外波段对分类精度的提升贡献突出,传统分类方法能够提高幅度5%以上,CNN提高幅度1%~3%。
(3)影像红边和近红外波段对CNN分类精度影响较小(3%以内),显示了CNN模型具有强大的泛化能力和鲁棒性。
(4)CNN方法结合JL1-07B数据能获取高精度精细化城区土地覆被信息,为城市土地规划与管理提供有效的技术手段和方法。JL1-07B遥感数据的有效应用在一定程度上为国产卫星的应用与发展提供了参考。
参考文献
The analysis on urban costruction land change and driving forces in Nanjing from 2000 to 2014
[J].
南京市2000~2014年城市建设用地变化及驱动因子研究
[J].
Urban-rural land use plan monitoring based on high spatial resolution remote sensing imagery classification
[J].
基于高分辨率遥感影像分类的城镇土地利用规划监测
[J].
Land use change analysis in the coastal aone of Zhuhai city based on ULAT method
[J].
基于ULAT的珠海市海岸带土地利用变化分析
[J].
A hybrid approach to urban land use/cover map-ping using Landsat 7 enhanced thematic Mapper Plus (ETM+) images
[J].
Mapping urban land use by using landsat images and open social data
[J].
Application of high-spatial IKNOS remote sensing images in land use classification and change monitoring
[J].
高分辨率遥感卫星影像在土地利用分类及其变化监测的应用研究
[J].
An analysis of urban land use/land cover changes in blantyre city, Southern Malawi (1994-2018)
[J].
Urban land classification of high-resolution images based on multi-scale fusion
[J].
基于多尺度融合的高分辨率影像城市用地分类
[J].
Spatial metrics and image texture for mapping urban land use
[J].
A rule-based parameter aided with object-based classification approach for extraction of building and roads from WorldView-2 images
[J].
Change detection of land use in Wuhan City based on multi temporal band combination of GF-1
[J].
基于GF-1多时相波段组合的武汉市土地利用变化检测
[J].
Application of JL1 high-resolution image in urban management
[J].
吉林一号高分辨率影像在城市管理中的应用
[J].
Application of JL1 in surface water remote sensing monitoring
[J].
吉林一号在地表水遥感监测中的应用
[J].
Comparison of machine learning methods for land use/land cover classification in the complicated terrain regions
[J].
复杂地形区土地利用/土地覆被分类机器学习方法比较研究
[J].
An Improved SVM algorithm for high spatial resolution remote sensing image classification
[J].
基于改进SVM算法的高分辨率遥感影像分类
[J].
An automated artificial neural network system for land use/land cover classification from Landsat TM imagery
[J].
Deep learning earth observation classification using imagenet pretrained networks
[J].
Deep fully convolutional networks for the detection of informal settlements in VHR images
[J].
High-resolution aerial image labeling with convolutional neural networks
[J].
Deep learning classification of land cover and crop types using remote sensing data
[J].
Learning sensor-specific spatial-spectral features of hyperspectral images via convolutional neural networks
[J].
Unsupervised-restricted deconvolutional neural network for very high resolution remote-sensing image classification
[J].
Land cover classification for different spatial resolution images from CNN
[J].
基于CNN 的不同空间分辨率影像土地覆被分类研究
[J].
Crop mapping using remotely sensed spectral and context features based on CNN
[J].
基于CNN和农作物光谱纹理特征进行作物分布制图
[J].
A hybrid OSVM-OCNN method for crop classification from fine spatial resolution remotely sensed imagery
[J].
An Object-based Convolutional Neural Network (OCNN) for urban land use classification
[J].
On land use classification by means of machine learning based on multi-source remote sensing image fusion
[J].
基于机器学习的多源遥感影像融合土地利用分类研究
[J].
A study of accuracy control of land cover classification based on MLH algorithm
[J].
基于最大似然分类算法的土地覆盖分类精度控制研究
[J].
The classification model of RS images based on artificial neural network——MLP
[J].
基于人工神经网络——多层感知器(MLP)的遥感影像分类模型
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}